
Research on High-Frequency Torsional Oscillation Identification Using TSWOA-SVM Based on Downhole Parameters


Abstract
:1. Introduction
2. The Parameter Optimization Based on Improved Whale Algorithm
2.1. Whale Optimization Algorithm
- (1)
- Encircling prey
- (2)
- Bubble net feeding
- (3)
- Random prey search
2.2. Improved Whale Optimization Algorithm
- (1)
- Fuch chaotic mapping cum reverse learning strategy
- (2)
- Hyperbolic tangent function (tanh)
- (3)
- Simulated Annealing Strategy
- (4)
- Description of the improved whale optimization algorithm (TSWOA)

2.3. Support Vector Machine Optimization Based on Improved Whale Algorithm
3. The Characteristics Analysis of HFTO
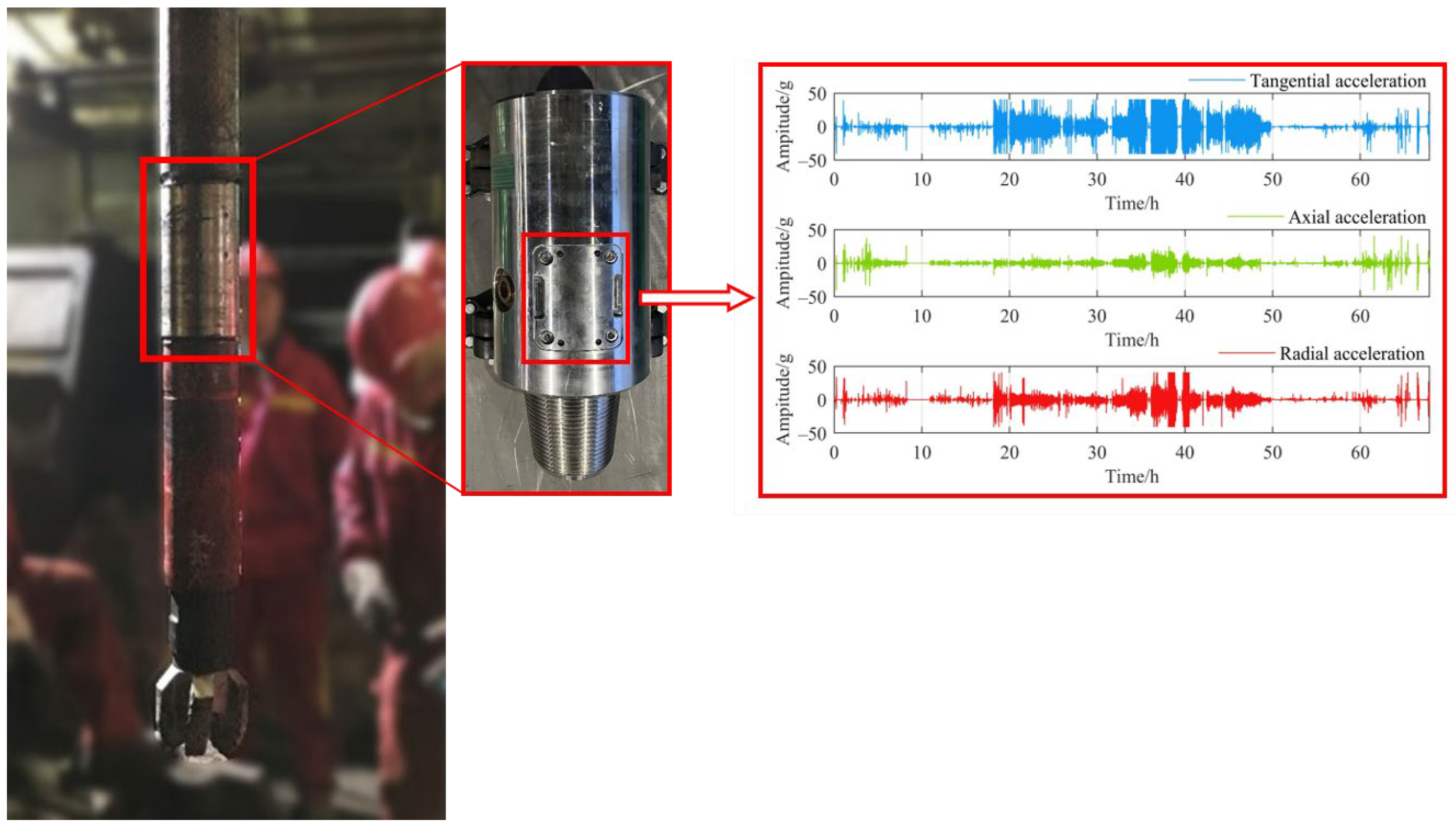
3.1. Source of Downhole Measured Datasets

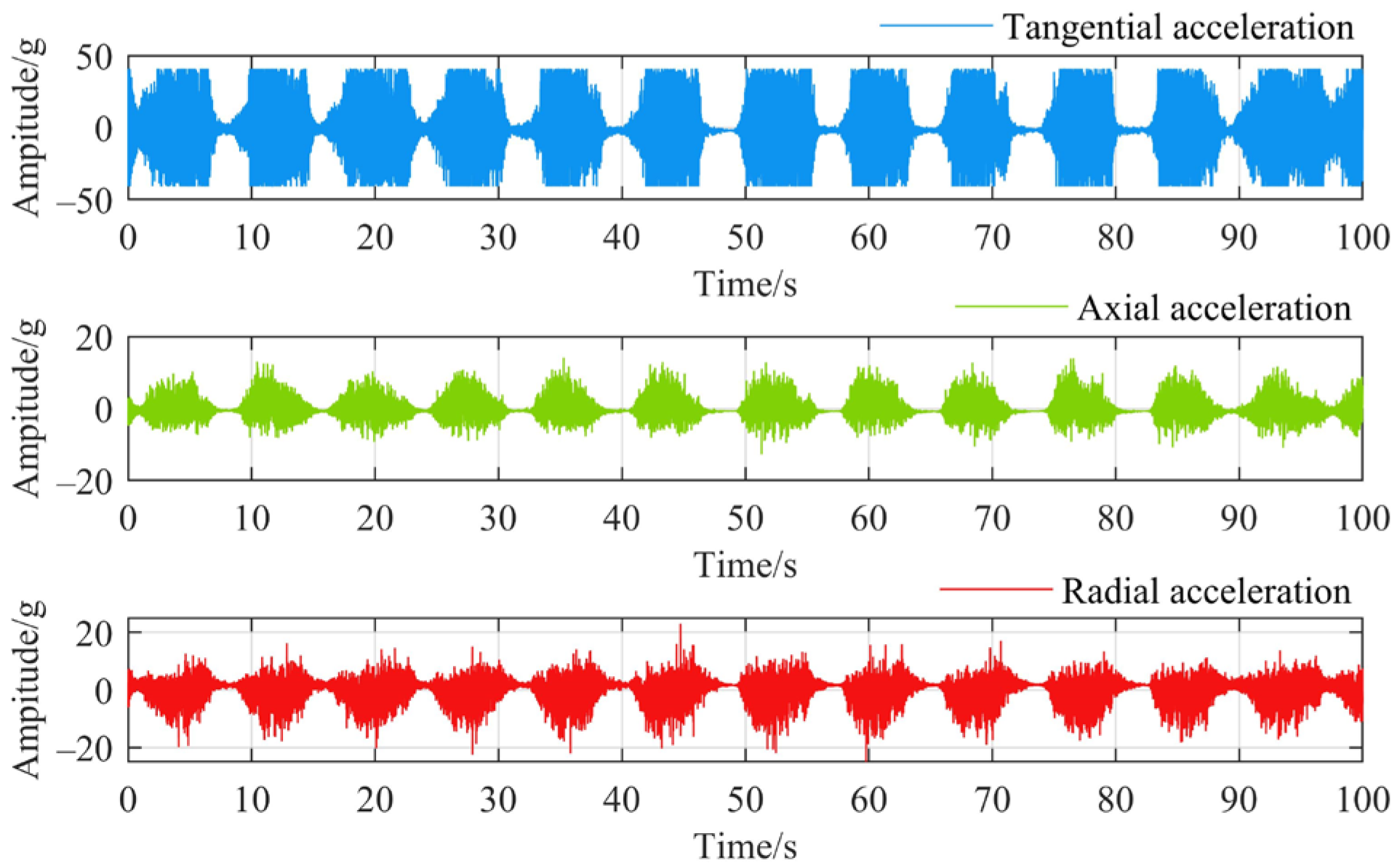
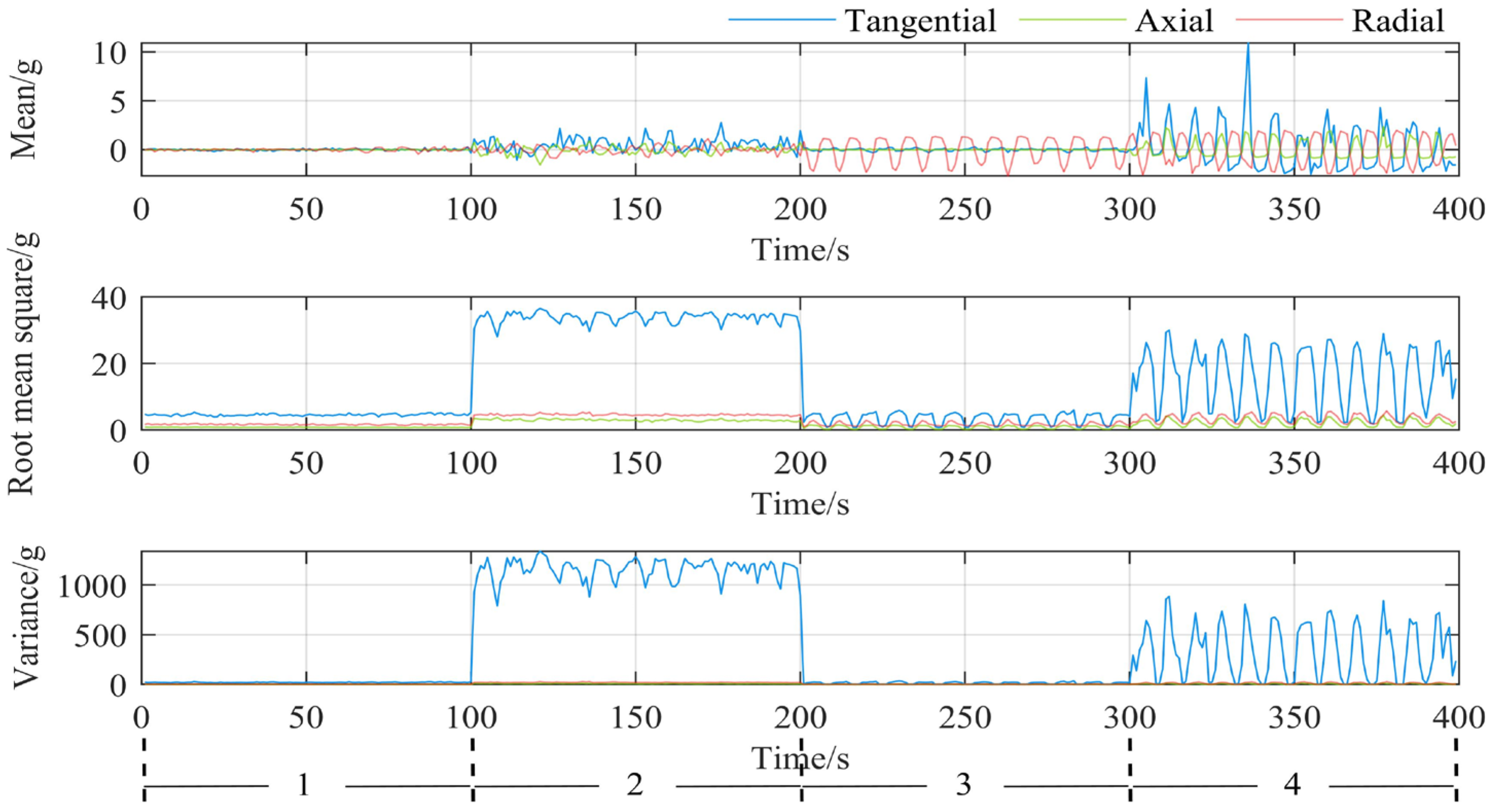
3.2. Time Domain Analysis
3.3. Time Frequency Domain Analysis
4. Experimentation and Analysis
4.1. Improved Whale Algorithm Performance Test
4.2. Experiment for Identifying HFTO
4.2.1. Data Preprocessing
4.2.2. TSWOA-SVM Downhole Drilling Conditions Recognition Model
4.2.3. Analysis of Results
5. Conclusions
- (1)
- An improved whale algorithm (TSWOA) is presented in this research. The innovations of the TSWOA compared to the traditional WOA lies in its utilization of the Fuch chaotic mapping with a reverse learning strategy to enhance population quality; furthermore, it introduces a simulated annealing strategy and hyperbolic tangent function to improve the algorithm’s ability to search globally. The benchmark function test results show that the TSWOA has a faster rate of convergence and effectively avoids local optima.
- (2)
- Using the downhole near-bit engineering parameter measurement tool to collect downhole engineering data, 400 sets of data were selected for each of the four states downhole. Each sample includes parameters such as RPM, torque, and three-axis vibration. These data provide support for the analysis and identification of downhole HFTO. The TSWOA is used for parameter optimization in SVM, and a TSWOA-SVM algorithm model is established for HFTO recognition. The TSWOA-SVM algorithm model’s classification performance is compared to that of GA-SVM, GWO-SVM, and WOA-SVM algorithm models. It is found that the TSWOA-SVM algorithm model overall outperformed the other algorithms significantly, with an accuracy of 97.8%. Therefore, TSWOA-SVM has good application prospects in high-frequency torsional vibration recognition.
- (3)
- To further validate the effectiveness and stability of the TSWOA-SVM, we conducted a 5-fold cross-validation experiment comparing this algorithm with GA-SVM, GWO-SVM, and WOA-SVM. The experimental results show that the TSWOA-SVM algorithm achieves a higher average cross-validation accuracy compared to the other three algorithms and has the smallest accuracy variance. This indicates that TSWOA-SVM performs more stably on different subsets of data. Therefore, TSWOA-SVM has better generalization ability and robustness.
- (4)
- The primary limitation of this study lies in its reliance on downhole data for feature extraction. Future research should prioritize effective extraction of latent features from both surface low-frequency data and downhole high-frequency data, thereby comprehensively integrating relationships between these datasets. Furthermore, subsequent investigations should consider incorporating transfer learning methodologies alongside the proposed TSWOA-SVM model. This approach would enhance applicability to the fused dataset and allow for the adjustment of model parameters to better accommodate characteristics of the new data. Employing test data for rigorous model validation and performance evaluation will be crucial to ensuring the stability and generalizability of the model. Ultimately, the objective is to leverage subtle variations in surface data to accurately identify HFTO.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cai, M.; Mao, L.; Xing, X.; Zhang, H.; Li, J. Analysis on the nonlinear lateral vibration of drillstring in curved wells with beam finite element. Commun. Nonlinear Sci. Numer. Simul. 2022, 104, 106065. [Google Scholar] [CrossRef]
- Rajabali, F.; Moradi, H.; Vossoughi, G. Coupling analysis and control of axial and torsional vibrations in a horizontal drill string. J. Petrol. Sci. Eng. 2020, 195, 107534. [Google Scholar] [CrossRef]
- Caballero, E.F.; Lobo, D.M.; Di Vaio, M.V.; Silva, E.; Ritto, T.G. Support vector machines applied to torsional vibration severity in drill strings. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 386. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, Z.; Zhao, J.; Chen, W.; Hamzah, M.; Harmer, R.; Downton, G. The Origin and Mechanism of Severe Stick-Slip. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 9–11 October 2017. [Google Scholar] [CrossRef]
- Nordin, M.H.; Looi, L.K.; Slagel, P.; Othman, M.H.; Affandi, A.R.; Zurhan, M.S. Minimising Torsional Vibration Due to Stick Slip Using Z Technology for Drilling Energy Efficiency in Multiple Hard Stringers Field in Offshore Malaysia. In Proceedings of the International Petroleum Technology Conference, Virtual, 23 March–1 April 2021. [Google Scholar] [CrossRef]
- Hu, J.; Guo, Q.; Sun, Z.; Yang, D. Study on low-frequency torsional vibration suppression of integrated electric drive system considering nonlinear factors. Energy 2023, 284, 129251. [Google Scholar] [CrossRef]
- Sharma, A.; Abid, K.; Srivastava, S. A review of torsional vibration mitigation techniques using active control and machine learning strategies. Petroleum 2024, 10, 411–426. [Google Scholar] [CrossRef]
- Jain, J.R.; Oueslati, H.; Hohl, A.; Reckmann, H.; Ledgerwood, L.W.; Tergeist, M.; Ostermeyer, G.P. High-frequency torsional dynamics of drilling systems: An analysis of the bit-system interaction. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, Fort Worth, TX, USA, 4–6 March 2014. [Google Scholar] [CrossRef]
- Eli, E.; Armin, K.; Xu, H.; Sui-Long, L.; Dennis, H.; Hanno, R.; John, B. Testing and Characterization of High-Frequency Torsional Oscillations in a Research Lab to Develop New HFTO Suppressing Solutions. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, Stavanger, Norway, 7–9 March 2023. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H.; Chen, D.; Ashok, P.; van Oort, E. Comprehensive review of high frequency torsional oscillations (HFTOs) while drilling. J. Pet. Sci. Eng. 2023, 220, 111161. [Google Scholar] [CrossRef]
- Lines, L.A.; Stroud, D.R.; Coveney, V.A. Torsional resonance—An understanding based on field and laboratory tests with latest generation point-the-bit rotary steerable system. In Proceedings of the SPE/IADC Drilling Conference, Amsterdam, The Netherlands, 5–7 March 2013. [Google Scholar] [CrossRef]
- Zhang, Z.; Shen, Y.; Chen, W.; Shi, J.; Bonstaff, W.; Tang, K.; Smith, D.L.; Arevalo, Y.I.; Jeffryes, B. Continuous high frequency measurement improves understanding of high frequency torsional oscillation in North America land drilling. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 9–11 October 2017. [Google Scholar] [CrossRef]
- Shen, Y.; Chen, W.; Zhang, Z.; Bowler, A.; Jeffryes, B.; Chen, Z.; Carrasquilla, M.N.; Smith, D.; Skoff, G.; Panayirci, H.M.; et al. Drilling dynamics model to mitigate high frequency torsional oscillation. In Proceedings of the IADC/SPE International Drilling Conference and Exhibition, Galveston, TX, USA, 3–5 March 2020. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, T.; Lin, Z.; Xu, C.; Li, Y.; Guo, H. Analysis on downhole high-frequency torsional oscillation of bottom hole assembly. China Pet. Mach. 2022, 50, 79–84. [Google Scholar] [CrossRef]
- Kulke, V.; Thunich, P.; Schiefer, F.; Ostermeyer, G.P. A method for the design and optimization of nonlinear tuned damping concepts to mitigate self-excited drill string vibrations using multiple scales lindstedt-poincaré. Appl. Sci. 2021, 11, 1559. [Google Scholar] [CrossRef]
- Kulke, V.; Ostermeyer, G.P. Energy transfer through parametric excitation to reduce self-excited drill string vibrations. J. Vib. Control 2022, 28, 3344–3351. [Google Scholar] [CrossRef]
- de Souza, R.L.B.; Fadhel, H.A.; Malik, K.A. Drilling Optimization using High Frequency Data Measuring Torsional Oscillations (HFTO) and Corresponding Frequencies Provided by Downhole Tools, Supported by Extensive Scientific Pre-Job BHA Modeling Allows to Reduce Downhole Tool Failures and Improve Performance. In Proceedings of the International Petroleum Technology Conference, Dhahran, Saudi Arabia, 12 February 2024. [Google Scholar] [CrossRef]
- Hohl, A.; Tergeist, M.; Oueslati, H.; Herbig, C.; Ichaoui, M.; Ostermeyer, G.P.; Reckmann, H. Prediction and mitigation of torsional vibrations in drilling systems. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, Fort Worth, TX, USA, 1–3 March 2016. [Google Scholar] [CrossRef]
- Sugiura, J.; Jones, S. Simulation and measurement of high-frequency torsional oscillation (HFTO)/High-frequency axial oscillation (HFAO) and downhole HFTO mitigation: Knowledge gains continue using embedded high-frequency drilling dynamics sensors. SPE Drill. Complet. 2020, 35, 553–575. [Google Scholar] [CrossRef]
- Ichaoui, M.; Ostermeyer, G.P.; Tergeist, M.; Hohl, A. Estimation of high-frequency vibration loads in deep drilling systems using augmented Kalman filters. In Proceedings of the ASME 2020 International Mechanical Engineering Congress and Exposition, Virtual, 16–19 November 2020. [Google Scholar] [CrossRef]
- Hohl, A.; MacFarlane, D.; Larsen, D.S.; Olsnes, K.; Grymalyuk, S.; Gatzen, M.; Hovda, S. Utilizing downhole sampled high-frequency torsional oscillation measurements for identifying stringers and minimizing operational invisible lost time ILT. In Proceedings of the SPE Annual Technical Conference and Exhibition, Dubai, United Arab Emirates, 21–23 September 2021. [Google Scholar] [CrossRef]
- Sugiura, J.; Jones, S. A drill bit and a drilling motor with embedded high-frequency (1600 Hz) drilling dynamics sensors provide new insights into challenging downhole drilling conditions. SPE Drill. Complet. 2019, 34, 223–247. [Google Scholar] [CrossRef]
- Hohl, A.; Kulke, V.; Ostermeyer, G.P.; Kueck, A.; Peters, V.; Reckmann, H. Design and field deployment of a torsional vibration damper. In Proceedings of the IADC/SPE International Drilling Conference and Exhibition, Galveston, TX, USA, 8–10 March 2022. [Google Scholar] [CrossRef]
- Kueck, A.; Hohl, A.; Schepelmann, C.; Lam, S.-L.; Heinisch, D.; Herbig, C.; Kulke, V.; Ostermeyer, G.-P.; Reckmann, H.; Peters, V. Break-through in elimination of high-frequency torsional oscillations through new damping tool proven by field testing in the US. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2022. [Google Scholar] [CrossRef]
- Hanafy, A.; Kueck, A.; Pauli, A.; Huang, X.; Bomidi, J. The Benefit of In-Bit Sensing For Efficient Drilling of Deep Reach Lateral Wells in HFTO Prone Interbedded Abrasive Lithologies in North America Land. In Proceedings of the International Petroleum Technology Conference, Dhahran, Saudi Arabia, 12–13 February 2024. [Google Scholar] [CrossRef]
- Millan, E.; Ringer, M.; Boualleg, R.; Li, D. Real-time Drillstring Vibration Characterization Using Machine Learning. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, The Hague, The Netherlands, 5–7 March 2019. [Google Scholar] [CrossRef]
- Hegde, C.; Millwater, H.; Gray, K. Classification of drilling stick slip severity using machine learning. J. Pet. Sci. Eng. 2019, 179, 1023–1036. [Google Scholar] [CrossRef]
- Gupta, S.; Chatar, C.; Celaya, J.R. Machine learning lessons learnt in stick-slip prediction. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 11–14 November 2019. [Google Scholar] [CrossRef]
- Naraghi, M.; Ezzatyar, P.; Jamshidi, S. Prediction of drilling pipe sticking by active learning method (ALM). J. Pet. Gas Eng. 2013, 4, 173–183. [Google Scholar] [CrossRef]
- Chamkalani, A.; Pordel Shahri, M.; Poordad, S. Support vector machine model: A new methodology for stuck pipe prediction. In Proceedings of the SPE Unconventional Gas Conference and Exhibition, Muscat, Oman, 28–30 January 2013. [Google Scholar] [CrossRef]
- Fu, H.; Zhang, T.; Li, Y.; Liu, Y. Research on PCA-SVM stuck prediction based on downhole parameters. Comput. Simul. 2021, 38, 386–390. [Google Scholar]
- Hohl, A.; Kulke, V.; Kueck, A.; Herbig, C.; Reckmann, H.; Ostermeyer, G.P. The Nature of the Interaction Between Stick/Slip and High-Frequency Torsional Oscillations. In Proceedings of the IADC/SPE International Drilling Conference and Exhibition, Galveston, TX, USA, 3–5 March 2020. [Google Scholar] [CrossRef]
- Oueslati, H.; Jain, J.R.; Reckmann, H.; Ledgerwood, L.W.; Pessier, R.; Chandrasekaran, S. New insights into drilling dynamics through high-frequency vibration measurement and modeling. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 30 September–2 October 2013. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, S.; Yang, P. Prediction on hot rolled strip width based on improved BOA-ELM. Forg. Stamp. Technol. 2024, 49, 101–106+126. [Google Scholar]
- Li, C.; Mi, X.; Cui, X. Optimization of cold chain logistics distribution routing based on improved ant colony algorithm with hyperbolic tangent function. J. Highw. Transp. Res. Dev. 2023, 40, 236–244+258. [Google Scholar]
- Huang, Y.; Yuan, B.; Xu, S. Fault diagnosis of permanent magnet synchronous motor of coal mine belt conveyor based on digital twin and ISSA-RF. Processes 2022, 10, 1679. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, L. Fault diagnosis of hydraulic pumps based on support vector machine optimized by beetle antennae search. Noise Vib. Control 2022, 42, 105–109. [Google Scholar]
- Eskandari, A.; Milimonfared, J.; Aghaei, M. Autonomous monitoring of line-to-line faults in photovoltaic systems by feature selection and parameter optimization of support vector machine using genetic algorithms. Appl. Sci. 2020, 10, 5527. [Google Scholar] [CrossRef]
- Li, C.; Zhou, J.; Du, K.; Dias, D. Stability prediction of hard rock pillar using support vector machine optimized by three metaheuristic algorithms. Int. J. Min. Sci. Technol. 2023, 33, 1019–1036. [Google Scholar] [CrossRef]
- Rana, N.; Latiff, M.S.A.; Abdulhamid, S.M.; Chiroma, H. Whale optimization algorithm: A systematic review of contemporary applications, modifications and developments. Neural Comput. Appl. 2020, 32, 16245–16277. [Google Scholar] [CrossRef]
- Uzer, M.S.; Inan, O. Application of improved hybrid whale optimization algorithm to optimization problems. Neural Comput. Appl. 2023, 35, 12433–12451. [Google Scholar] [CrossRef]
- Chakraborty, S.; Sharma, S.; Saha, A.K.; Saha, A. A novel improved whale optimization algorithm to solve numerical optimization and real-world applications. Artif. Intell. Rev. 2022, 55, 4605–4716. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Zamani, H.; Asghari Varzaneh, Z.; Mirjalili, S. A systematic review of the whale optimization algorithm. theoretical foundation, improvements, and hybridizations. Arch. Comput. Methods Eng. 2023, 30, 4113–4159. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, H. Fault Diagnosis of an Autonomous Vehicle With an Improved SVM Algorithm Subject to Unbalanced Datasets. IEEE Trans. Ind. Electron. 2021, 68, 6248–6256. [Google Scholar] [CrossRef]
- Pule, M.; Matsebe, O.; Samikannu, R. Application of PCA and SVM in fault detection and diagnosis of bearings with varying speed. Math. Probl. Eng. 2022, 1, 5266054. [Google Scholar] [CrossRef]
- Kumar, A.; Gandhi, C.P.; Vashishtha, G.; Kundu, P.; Tang, H.; Glowacz, A.; Shukla, R.K.; Xiang, J. VMD based trigonometric entropy measure: A simple and effective tool for dynamic degradation monitoring of rolling element bearing. Meas. Sci. Technol. 2021, 33, 014005. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Function Name | Dimension | Search Space |
|---|---|---|---|
| F1 | Schwefel 2.22 | 30 | [−100,100] |
| F2 | Quartic Function | 30 | [−1.28,1.28] |
| F3 | Ackley’s Function | 30 | [−32,32] |
| F4 | Penalized Function | 30 | [−50,50] |
| Test Function | Algorithm | Average Value | Standard Deviation |
|---|---|---|---|
| Schwefel 2.22 | WOA | 1.00 × 10−106 | 3.69 × 10−122 |
| TSWOA | 0 | 0 | |
| Quartic Function | WOA | 5.96 × 10−3 | 8.82 × 10−19 |
| TSWOA | 9.87 × 10−7 | 4.31 × 10−22 | |
| Ackley’s Function | WOA | 7.99 × 10−15 | 0 |
| TSWOA | 8.88 × 10−16 | 0 | |
| Penalized Function | WOA | 1.16 × 10−3 | 8.82 × 10−19 |
| TSWOA | 2.56 × 10−24 | 3.74 × 10−40 |
| Working Condition | Labels | Sample Size of the Dataset (Group) |
|---|---|---|
| Stick–slip | 1 | 300 |
| HFTO | 2 | 300 |
| Normal drilling | 3 | 300 |
| Coupled vibration | 4 | 300 |
| Confusion Matrix | Precision | Recall | F1 Score | ||||
|---|---|---|---|---|---|---|---|
| True Label | Prediction Label | ||||||
| Stick–Slip | HFTO | Normal Drilling | Coupled Vibration | ||||
| Stick–slip | 87 | 1 | 2 | 0 | 0.989 | 0.967 | 0.978 |
| HFTO | 0 | 89 | 1 | 0 | 0.989 | 0.989 | 0.989 |
| Normal drilling | 1 | 0 | 89 | 0 | 0.937 | 0.989 | 0.962 |
| Coupled vibration | 0 | 0 | 3 | 87 | 1.000 | 0.967 | 0.983 |
| Model | Model Evaluation Indicators | |||
|---|---|---|---|---|
| Precision/% | Recall/% | F1-Score | Accuracy/% | |
| GA-SVM | 92.778 | 92.778 | 0.928 | 92.778 |
| GWO-SVM | 95.958 | 95.833 | 0.958 | 95.833 |
| WOA-SVM | 96.235 | 96.111 | 0.961 | 96.111 |
| TSWOA-SVM | 97.859 | 97.778 | 0.978 | 97.778 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Zhang, W.; Meng, Z.; Li, J.; Wang, M. Research on High-Frequency Torsional Oscillation Identification Using TSWOA-SVM Based on Downhole Parameters. Processes 2024, 12, 2153. https://doi.org/10.3390/pr12102153
Zhang T, Zhang W, Meng Z, Li J, Wang M. Research on High-Frequency Torsional Oscillation Identification Using TSWOA-SVM Based on Downhole Parameters. Processes. 2024; 12(10):2153. https://doi.org/10.3390/pr12102153
Chicago/Turabian StyleZhang, Tao, Wenjie Zhang, Zhuoran Meng, Jun Li, and Miaorui Wang. 2024. "Research on High-Frequency Torsional Oscillation Identification Using TSWOA-SVM Based on Downhole Parameters" Processes 12, no. 10: 2153. https://doi.org/10.3390/pr12102153