


Performance Improvement of an Electric Vehicle Charging Station Using Brain Emotional Learning-Based Intelligent Control


Abstract
1. Introduction
- A BELBIC controller was implemented to enhance the functionality of the suggested EV charging station.
- The suggested system’s performance using the BELBIC controller versus the traditional PI were compared.
- The performance of the controllers was evaluated under various solar insolation and load disturbances.
- The impacts of fluctuations in the solar insolation on the microgrid’s response were discussed and analyzed by modelling the suggested system using MATLAB (version R2023a).
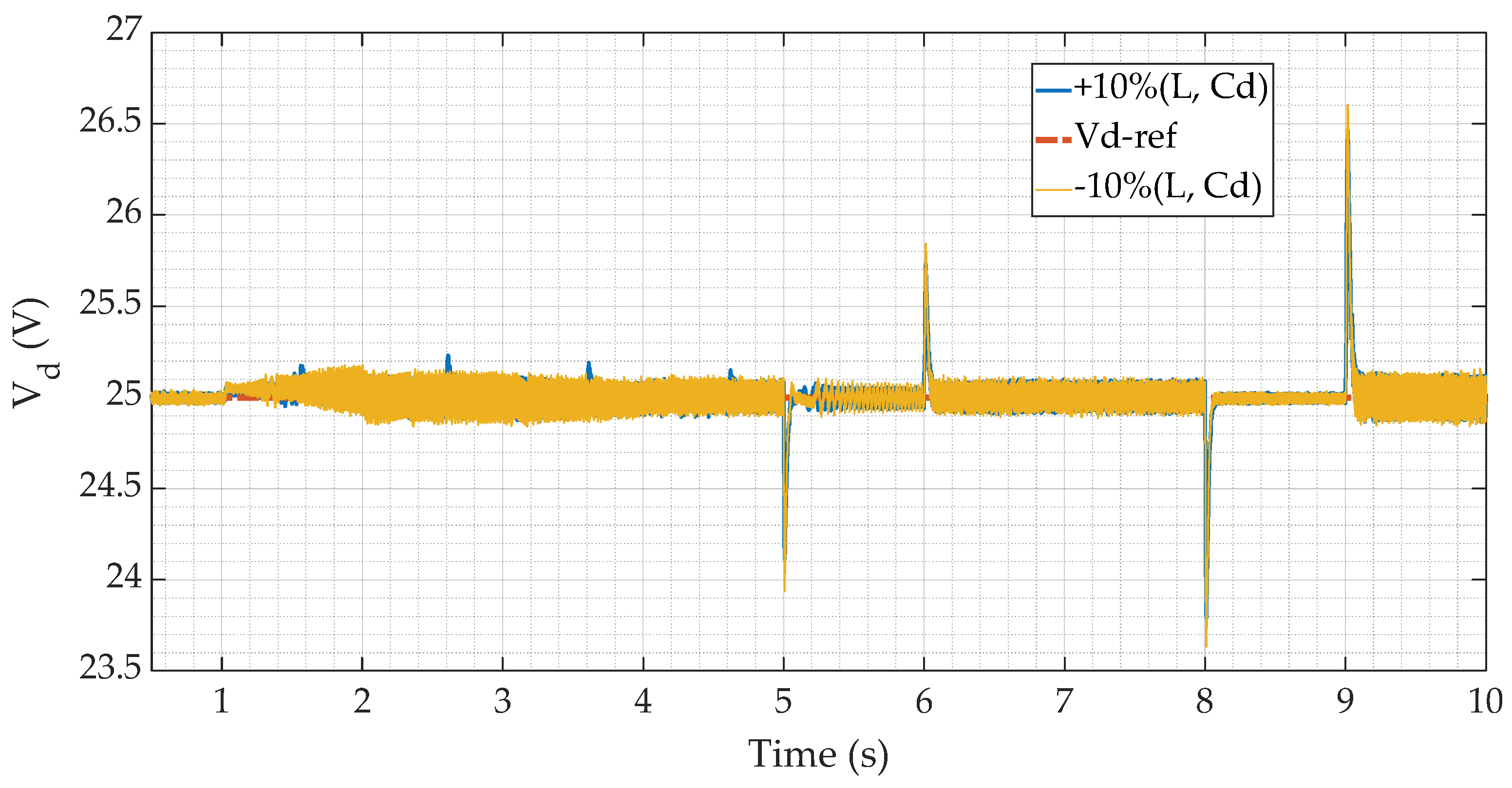
- The suggested control system’s durability was explored against the parameter uncertainty of the system.
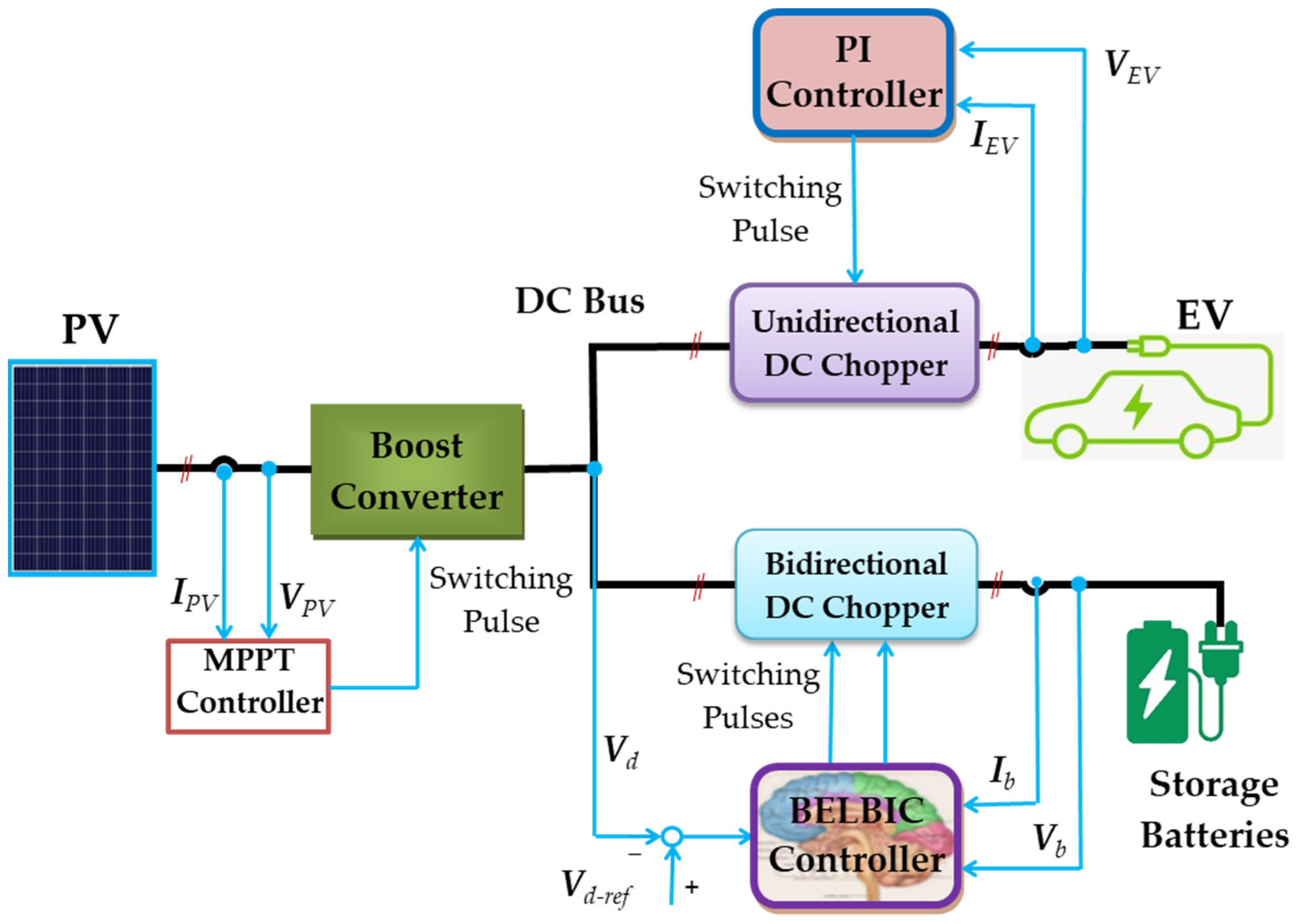
2. Modelling and Description of the Suggested Station
2.1. PV Model
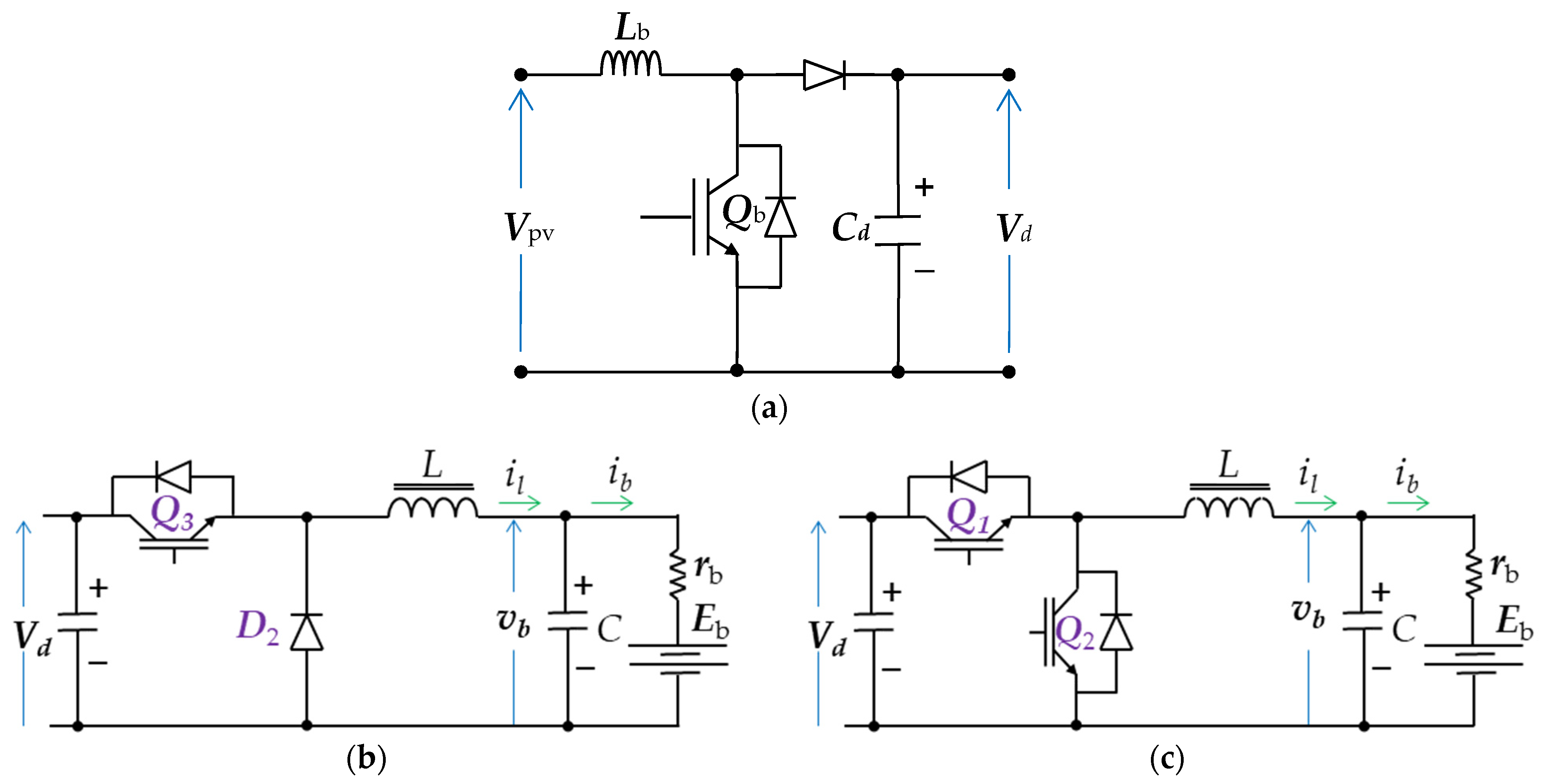
2.2. Step-Up Chopper Model
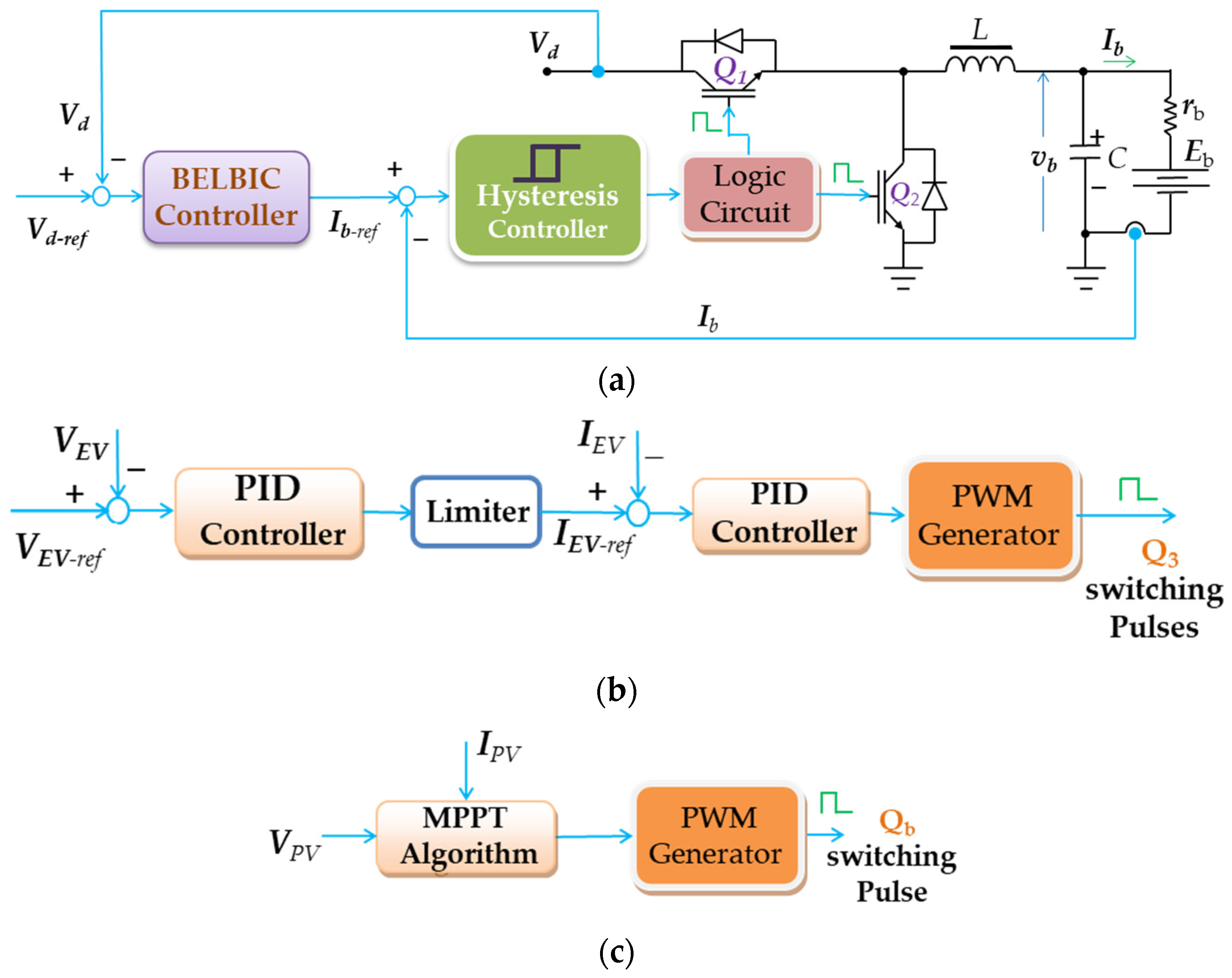
2.3. Step-Down Chopper Model
2.4. Two-Way Converter Model
3. Control System Description
- Catch the maximum power output from the PV panel.
- Regulate the charging process for the EV.
- Regulate the DC bus voltage.
- Regulate the charging processes of the battery storage.
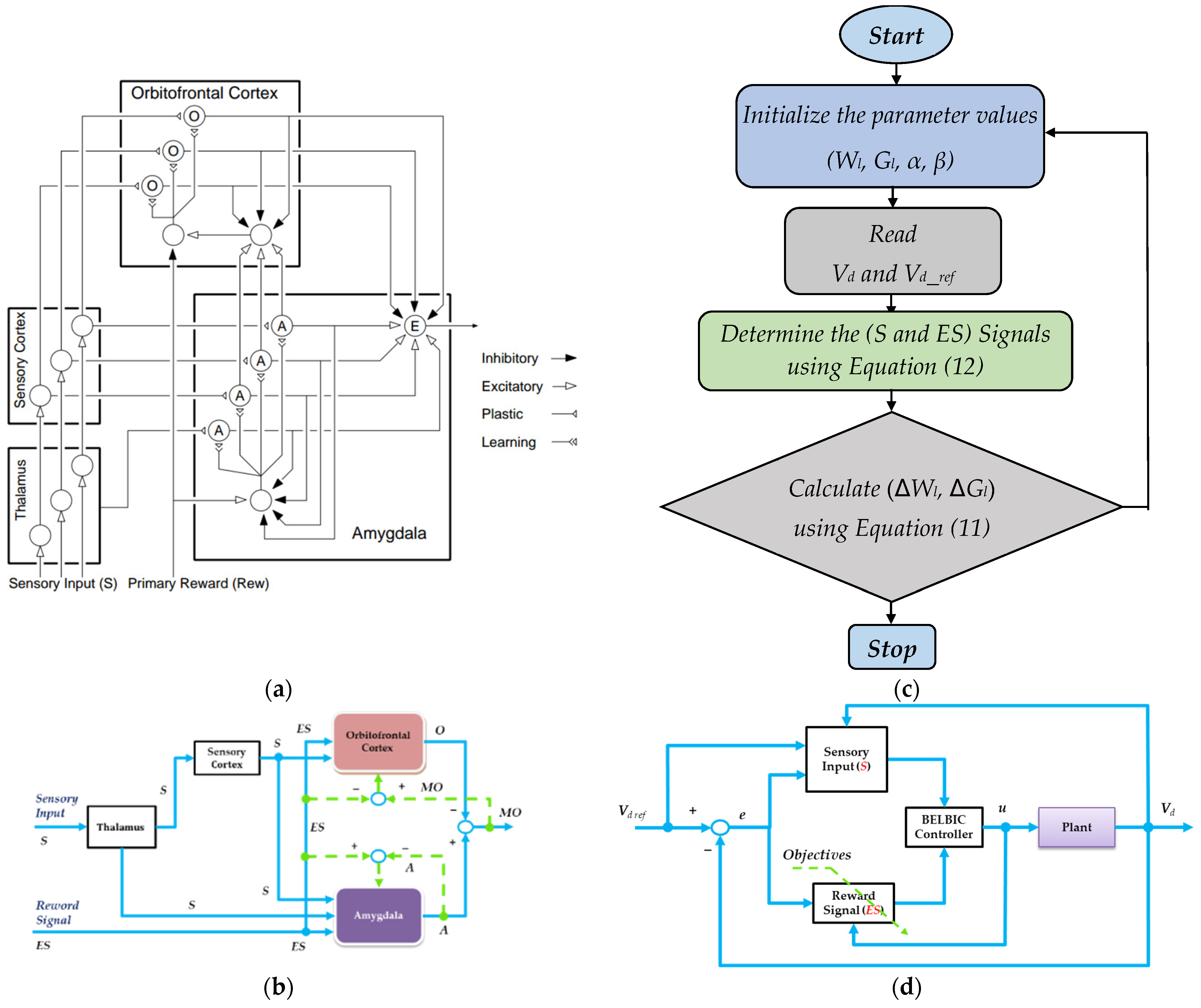
Proposed BELBIC Controller
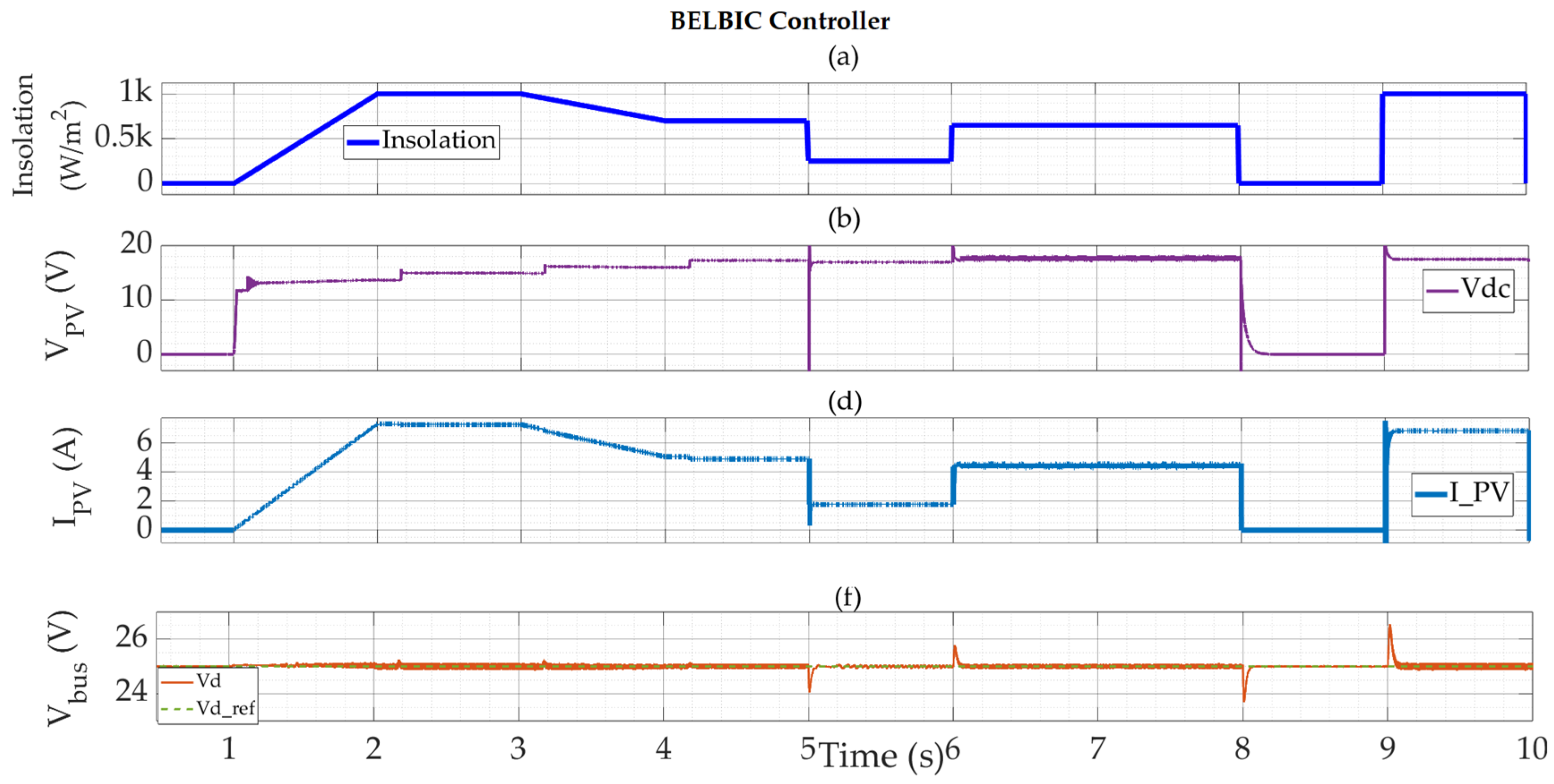
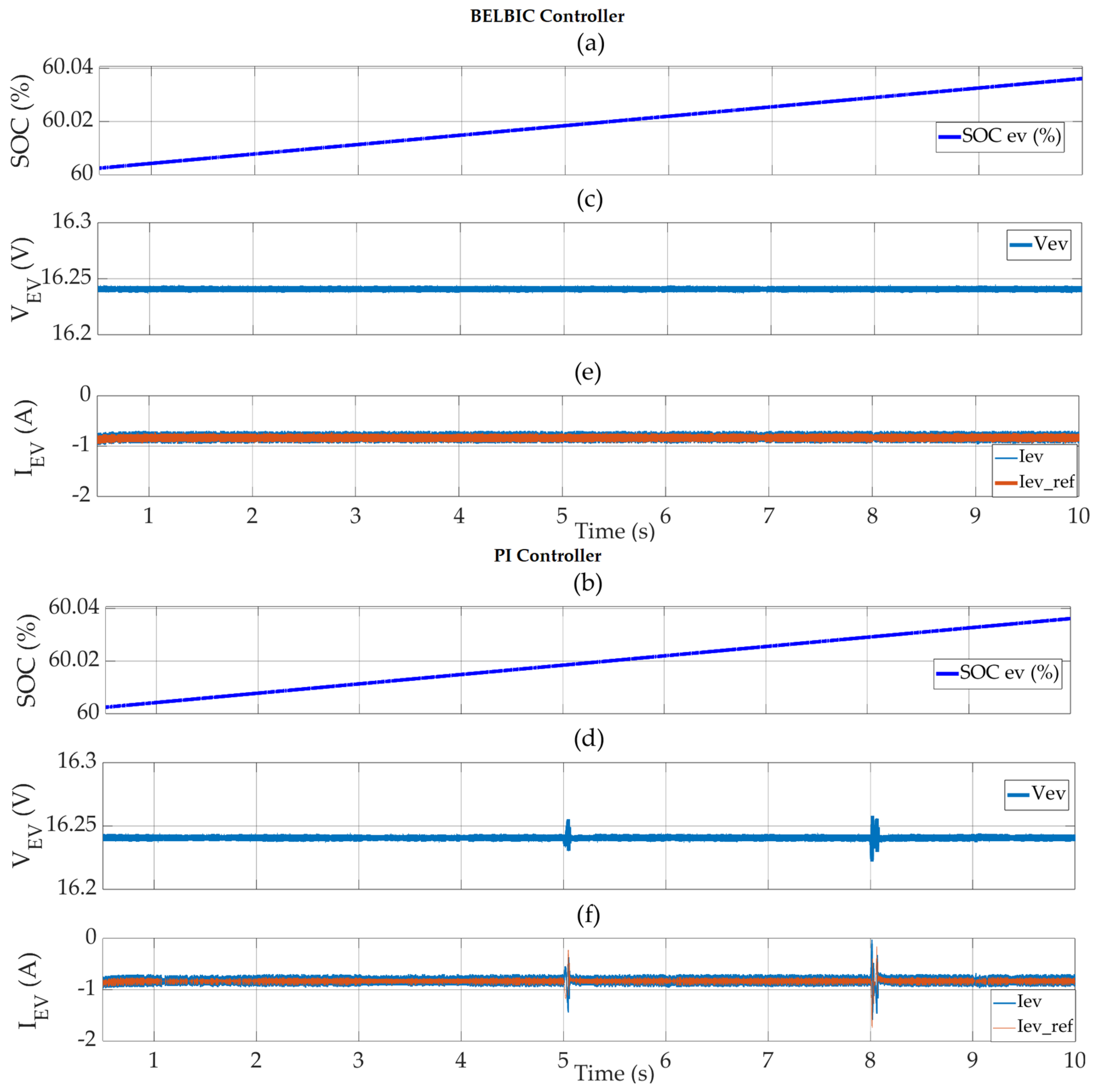
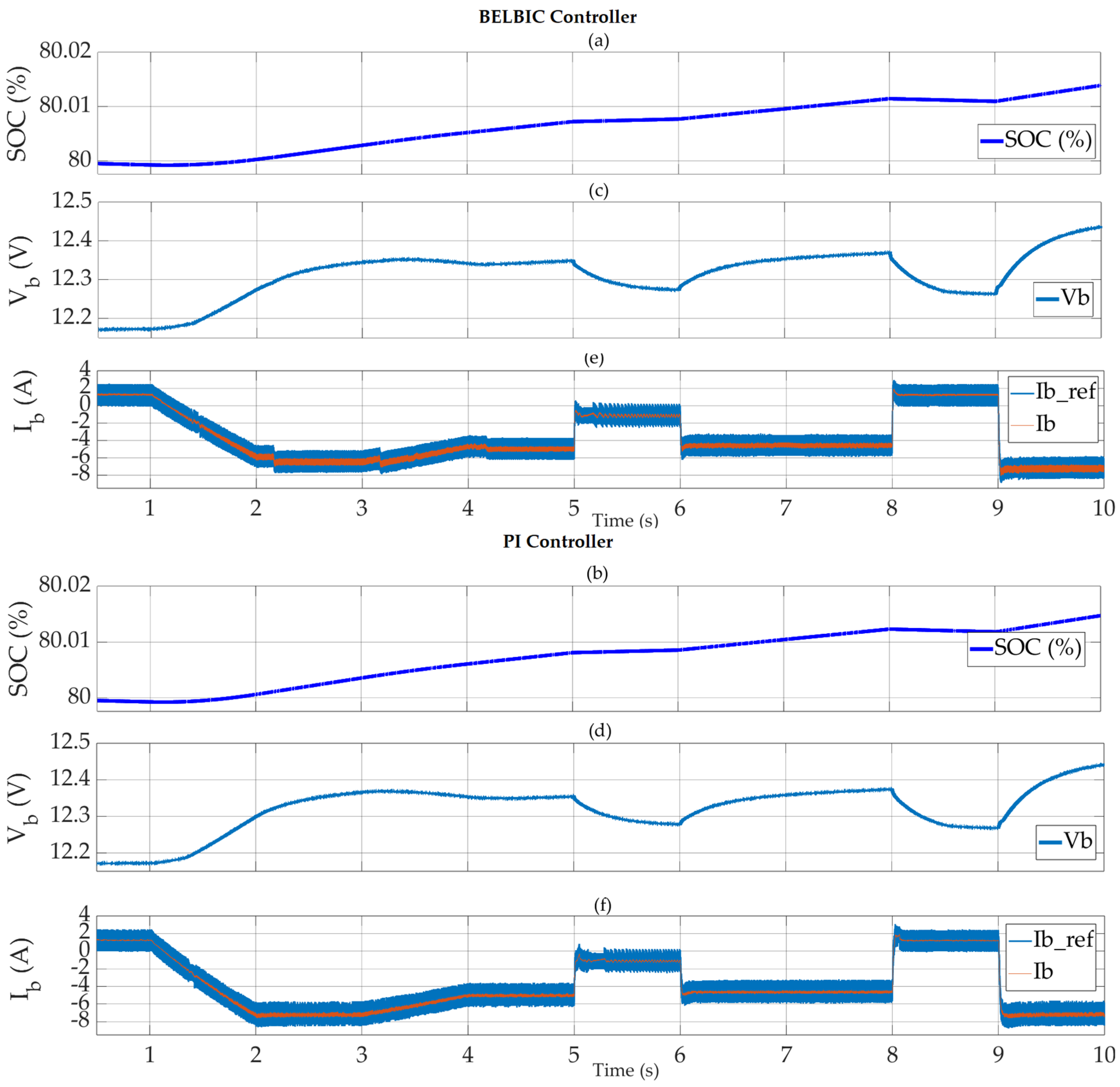
4. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| PV | Photovoltaic |
| EV | Electric vehicles |
| BELBIC | Brain-Emotional Learning Intelligent Control |
| DC | Direct current |
| AC | Alternating current |
| DC link voltage and current | |
| d | Duty ratio of the boost converter |
| PV voltage and current | |
| Battery voltage and current | |
| Rs, Rp | panel equivalent series and parallel resistances |
| ISC | PV short circuit current |
| L, C | Filter inductance and capacitance |
| Cd | DC bus capacitance |
| Eb, rb | Battery internal voltage and resistance |
| Q1, Q2 | Modulating functions of the IGBTs |
| MO | The net output of the BELBIC controller |
| Amygdala and orbitofrontal cortex outputs | |
| ES | Emotional signals |
| S | Sensory input |
| Ath | Thalamus node |
| l | Number of sensory inputs |
| (Gl and Wl) | Weighting parameters of the amygdala and orbitofrontal cortex |
| (α and β) | Rate of learning of the amygdala and orbitofrontal cortex |
| e | Error |
| y | Plant output |
| r | Reference signal |
| u | Control effort output |
| SOC | State of charge |
References
- Safayatullah, M.; Elrais, M.T.; Ghosh, S.; Rezaii, R.; Batarseh, I. A Comprehensive Review of Power Converter Topologies and Control Methods for Electric Vehicle Fast Charging Applications. IEEE Access 2022, 10, 40753–40793. [Google Scholar] [CrossRef]
- Rajendran, G.; Vaithilingam, C.A.; Misron, N.; Naidu, K.; Ahmed, M.R. A comprehensive review on system architecture and international standards for electric vehicle charging stations. J. Energy Storage 2021, 42, 103099. [Google Scholar] [CrossRef]
- Li, L.; Wang, Z.; Gao, F.; Wang, S.; Deng, J. A family of compensation topologies for capacitive power transfer converters for wireless electric vehicle charger. Appl. Energy 2020, 260, 114156. [Google Scholar] [CrossRef]
- Zaid, S.A.; Bakeer, A.; Albalawi, H.; Alatwi, A.M.; AbdelMeguid, H.; Kassem, A.M. Optimal Fractional-Order Controller for the Voltage Stability of a DC Microgrid Feeding an Electric Vehicle Charging Station. Fractal Fract. 2023, 7, 677. [Google Scholar] [CrossRef]
- Ahmad, F.; Iqbal, A.; Asharf, I.; Marzband, M.; Khan, I. Placement and Capacity of EV Charging Stations by Considering Uncertainties with Energy Management Strategies. IEEE Trans. Ind. Appl. 2023, 59, 3865–3874. [Google Scholar] [CrossRef]
- Yap, L. Electric Car Charging Tips. 2023. Available online: https://www.greencars.com/greencars-101/electric-car-charging-tips (accessed on 1 April 2024).
- Minh, P.V.; Quang, S.L.; Pham, M.H. Technical Economic Analysis of Photovoltaic-Powered Electric Vehicle Charging Stations under Different Solar Irradiation Conditions in Vietnam. Sustainability 2021, 13, 3528. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, H.; Wang, S.; Lan, M.; Zeng, M.; Zhang, S.; Yang, M.; Yin, S. An Optimization Approach Considering User Utility for the PV-Storage Charging Station Planning Process. Processes 2020, 8, 83. [Google Scholar] [CrossRef]
- Shariff, S.M.; Alam, M.S.; Ahmad, F.; Rafat, Y.; Asghar, M.S.J.; Khan, S. System Design and Realization of a Solar-Powered Electric Vehicle Charging Station. IEEE Syst. J. 2020, 14, 2748–2758. [Google Scholar] [CrossRef]
- Rafi, M.A.H.; Bauman, J.A. Comprehensive Review of DC Fast Charging Stations with Energy Storage: Architectures, Power Converters, and Analysis. IEEE Trans. Transp. Electrif. 2021, 7, 345–368. [Google Scholar] [CrossRef]
- Mouli, C.G.R.; Schijffelen, J.; Heuvel, M.; Kardolus, M.; Bauer, P. A 10 kW Solar-Powered Bidirectional EV Charger Compatible with Chademo and COMBO. IEEE Trans. Power Electron. 2019, 34, 1082–1098. [Google Scholar] [CrossRef]
- Atawi, I.E.; Hendawi, E.; Zaid, S.A. Analysis and Design of a Standalone Electric Vehicle Charging Station Supplied by Photovoltaic Energy. Processes 2021, 9, 1246. [Google Scholar] [CrossRef]
- Awad, M.; Ibrahim, A.M.; Alaas, Z.M.; El-Shahat, A.; Omar, A.I. Design and analysis of an efficient photovoltaic energy-powered electric vehicle charging station using perturb and observe MPPT algorithm. in Front. Energy Res. 2022, 10, 969482. [Google Scholar] [CrossRef]
- Singh, S.; Chauhan, P.; Singh, N.J. Feasibility of grid-connected solar-wind hybrid system with electric vehicle charging station. J. Mod. Power Syst. Clean Energy 2020, 9, 295–306. [Google Scholar] [CrossRef]
- Ahmadi, M.; Kaleybar, H.J.; Brenna, M.; Castelli-Dezza, F.; Carmeli, M.S. DC Railway Micro Grid Adopting Renewable Energy and EV Fast Charging Station. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 7–10 September 2021; pp. 1–6. [Google Scholar]
- Oulad-Abbou, D.; Doubabi, S.; Rachid, A.; García-Triviño, P.; Fernández-Ramírez, L.M.; Fernández-Ramírez, C.A.; Sarrias-Mena, R. Combined control of MPPT, output voltage regulation and capacitors voltage balance for three-level DC/DC boost converter in PV-EV charging stations. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 372–376. [Google Scholar]
- Sharma, P. Design of novel BELBIC controlled semi-active suspension and comparative analysis with passive and PID controlled suspension. Walailak J. Sci. Technol. 2021, 18, 8989. [Google Scholar] [CrossRef]
- Ershadi, M.H.; Shojaeian, S.; Keramat, R. A comparison of fuzzy and brain emotional learning-based intelligent control approaches for a full bridge DC-DC converter. Int. J. Ind. Electron. Control. Optim. 2019, 2, 197–206. [Google Scholar]
- Zirkohi, M.M. Stability analysis of brain emotional intelligent controller with application to electrically driven robot manipulators. IET Sci. Meas. Technol. 2020, 14, 182–187. [Google Scholar] [CrossRef]
- Sharma, P.; Kumar, V. Design and analysis of novel bio inspired BELBIC and PSOBELBIC controlled semi active suspension. Int. J. Veh. Perform. 2020, 6, 399–424. [Google Scholar] [CrossRef]
- Kumar, G.B. Optimal power point tracking of solar and wind energy in a hybrid wind solar energy system. Int. J. Energy Environ. Eng. 2021, 13, 77–103. [Google Scholar] [CrossRef]
- Karan, D.; Harish, V.S.K.V. Analysis of a wind-PV battery hybrid renewable energy system for a dc microgrid. Mater. Today Proc. 2021, 46, 5451–5457. [Google Scholar]
- Al Alahmadi, A.A.; Belkhier, Y.; Ullah, N.; Abeida, H.; Soliman, M.S.; Khraisat, Y.S.H.; Alharbi, Y.M. Hybrid wind/PV/battery energy management-based intelligent non-integer control for smart DC-microgrid of smart university. IEEE Access 2021, 9, 98948–98961. [Google Scholar] [CrossRef]
- Hua, M.; Zhang, C.; Zhang, F.; Li, Z.; Yu, X.; Xu, H.; Zhou, Q. Energy management of multi-mode plug-in hybrid electric vehicle using multi-agent deep reinforcement learning. Appl. Energy 2023, 348, 121526. [Google Scholar] [CrossRef]
- Kouro, S.; Cortés, P.; Vargas, R.; Ammann, U.; Rodríguez, J. Model predictive control—A simple and powerful method to control power converters. IEEE Trans. Ind. Electron. 2008, 56, 1826–1838. [Google Scholar] [CrossRef]
- Şahin, M.E.; Blaabjerg, F. A Hybrid PV-Battery/Supercapacitor System and a Basic Active Power Control Proposal in MATLAB/Simulink. Electronics 2020, 9, 129. [Google Scholar] [CrossRef]
- Sharaf, A.M.; Şahin, M.E. A Flexible PV-Powered Battery-Charging Scheme for Electric Vehicles. IETE Tech. Rev. 2017, 34, 133–143. [Google Scholar] [CrossRef]
- Zaid, S.A.; Albalawi, H.; Alatawi, K.S.; El-Rab, H.W.; El-Shimy, M.E.; Lakhouit, A.; Alhmiedat, T.A.; Kassem, A.M. Novel Fuzzy Controller for a Standalone Electric Vehicle Charging Station Supplied by Photovoltaic Energy. Appl. Syst. Innov. 2021, 4, 63. [Google Scholar] [CrossRef]
- Rashid, M. Power Electronics Handbook, 2nd ed.; Elsevier Press: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Şahin, M.E.; Blaabjerg, F. PV Powered Hybrid Energy Storage System Control Using Bidirectional and Boost Converters. Electr. Power Comp. Syst. 2021, 49, 1260–1277. [Google Scholar] [CrossRef]
- Zaid, S.A.; Kassem, A.M. Review, analysis and improving the utilization factor of a PV-grid connected system via HERIC transformerless approach. Renew. Sustain. Energy Rev. 2017, 73, 1061–1069. [Google Scholar] [CrossRef]
- Albalawi, H.; El-Shimy, M.E.; AbdelMeguid, H.; Kassem, A.M.; Zaid, S.A. Analysis of a Hybrid Wind/Photovoltaic Energy System Controlled by Brain Emotional Learning-Based Intelligent Controller. Sustainability 2022, 14, 4775. [Google Scholar] [CrossRef]
- Jafari, M.; Xu, H.; Carrillo, L.R.G. Brain emotional learning-based intelligent controller for flocking of multi-agent systems. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1996–2001. [Google Scholar]
- Muthusamy, P.K.; Garratt, M.; Pota, H.; Muthusamy, R. Real-time adaptive intelligent control system for quadcopter unmanned aerial vehicles with payload uncertainties. IEEE Trans. Ind. Electron. 2021, 69, 1641–1653. [Google Scholar] [CrossRef]
- Yeganeh, M.S.O.; Oshnoei, A.; Mijatovic, N.; Dragicevic, T.; Blaabjerg, F. Intelligent secondary control of islanded AC microgrids: A brain emotional learning-based approach. IEEE Trans. Ind. Electron. 2022, 70, 6711–6723. [Google Scholar] [CrossRef]
- Dorrah, H.T.; El-Garhy, A.M.; El-Shimy, M.E. PSO-BELBIC scheme for two-coupled distillation column process. J. Adv. Res. 2011, 2, 73–83. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Maximum power | 120 W |
| Voltage and current for maximum power (Vpmax, Ipmax) | 17.33 V, 6.93 A |
| Number of series and parallel cells | 360 series, and 10 parallel |
| Short circuit current | 7.49 A |
| Open circuit voltage | 21.6 V |
| Temperature | 25° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaid, S.A.; Albalawi, H.; Alatwi, A.M.; Elemary, A. Performance Improvement of an Electric Vehicle Charging Station Using Brain Emotional Learning-Based Intelligent Control. Processes 2024, 12, 1014. https://doi.org/10.3390/pr12051014
Zaid SA, Albalawi H, Alatwi AM, Elemary A. Performance Improvement of an Electric Vehicle Charging Station Using Brain Emotional Learning-Based Intelligent Control. Processes. 2024; 12(5):1014. https://doi.org/10.3390/pr12051014
Chicago/Turabian StyleZaid, Sherif A., Hani Albalawi, Aadel M. Alatwi, and Atef Elemary. 2024. "Performance Improvement of an Electric Vehicle Charging Station Using Brain Emotional Learning-Based Intelligent Control" Processes 12, no. 5: 1014. https://doi.org/10.3390/pr12051014
APA StyleZaid, S. A., Albalawi, H., Alatwi, A. M., & Elemary, A. (2024). Performance Improvement of an Electric Vehicle Charging Station Using Brain Emotional Learning-Based Intelligent Control. Processes, 12(5), 1014. https://doi.org/10.3390/pr12051014