

Optimizing Accumulator Performance in Hydraulic Systems through Support Vector Regression and Rotational Factors


Abstract
1. Introduction
2. Related Works
3. Principle of FMCW Radar Range Measurement
4. Compensation Method for Accumulator Piston Displacement Signal
4.1. EMD Decomposition Achieves Signal Denoising
4.2. Generate Delay Compensation Module Based on Rotation Factor
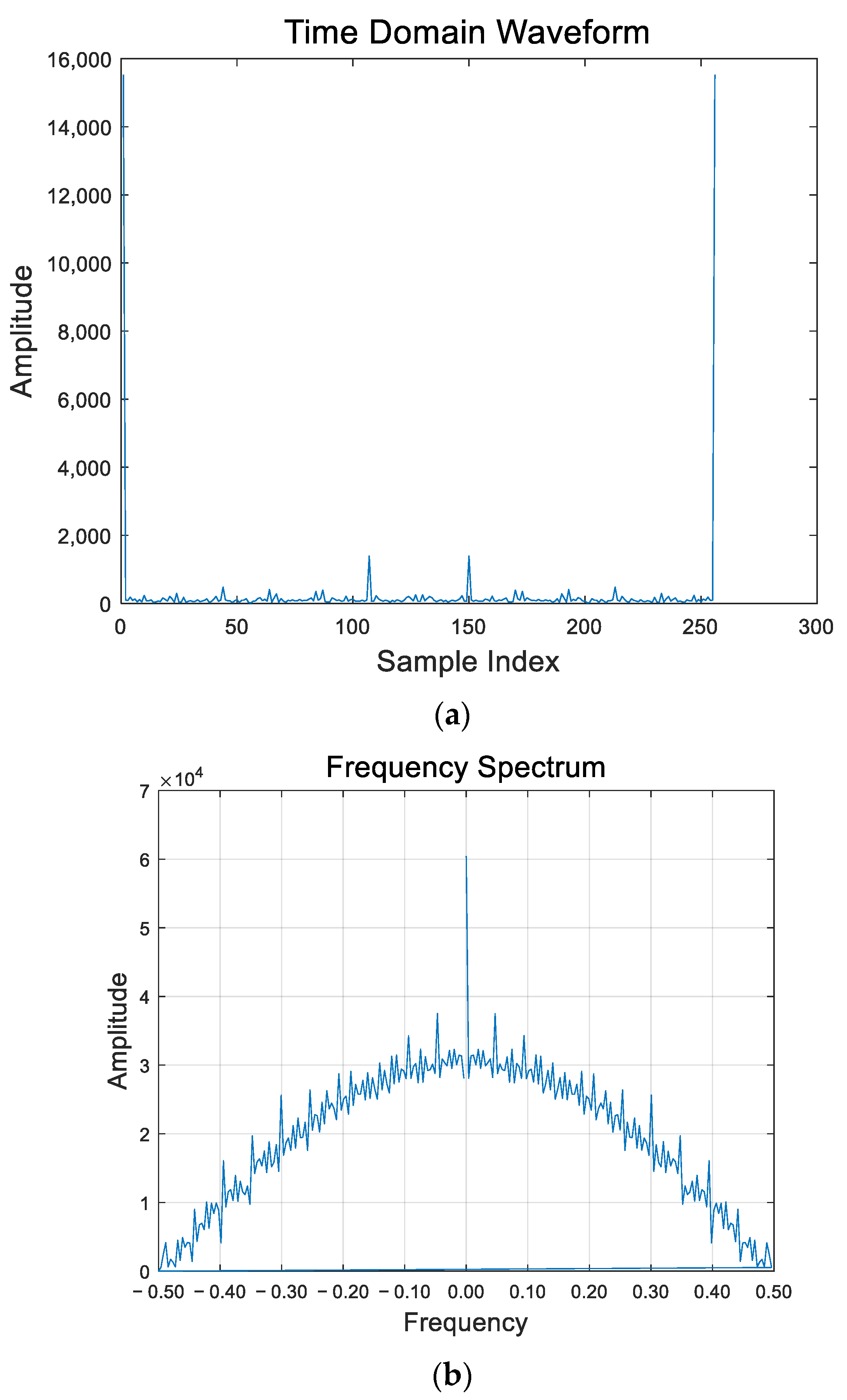
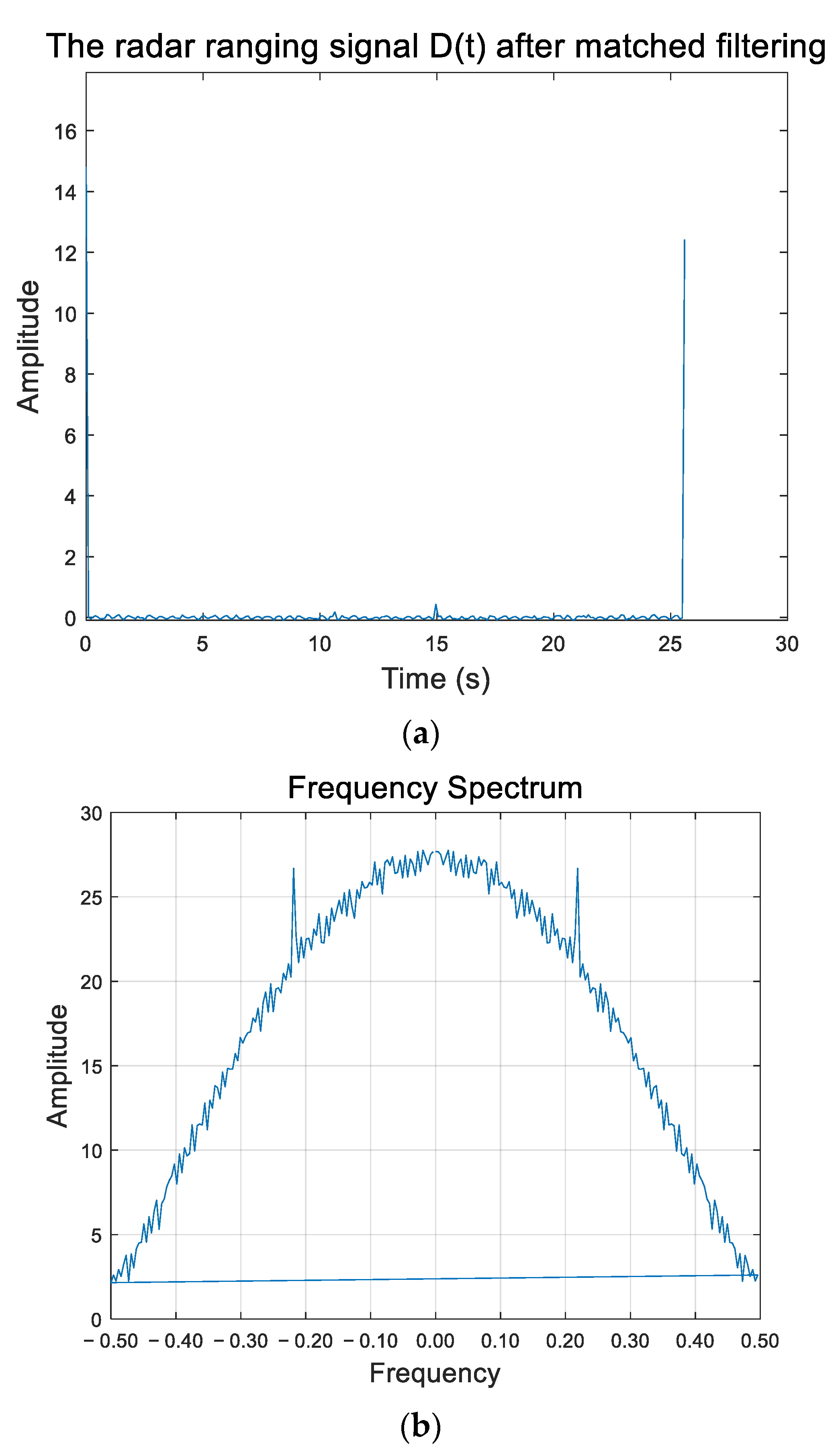
4.2.1. Matched Filter Gain Algorithm
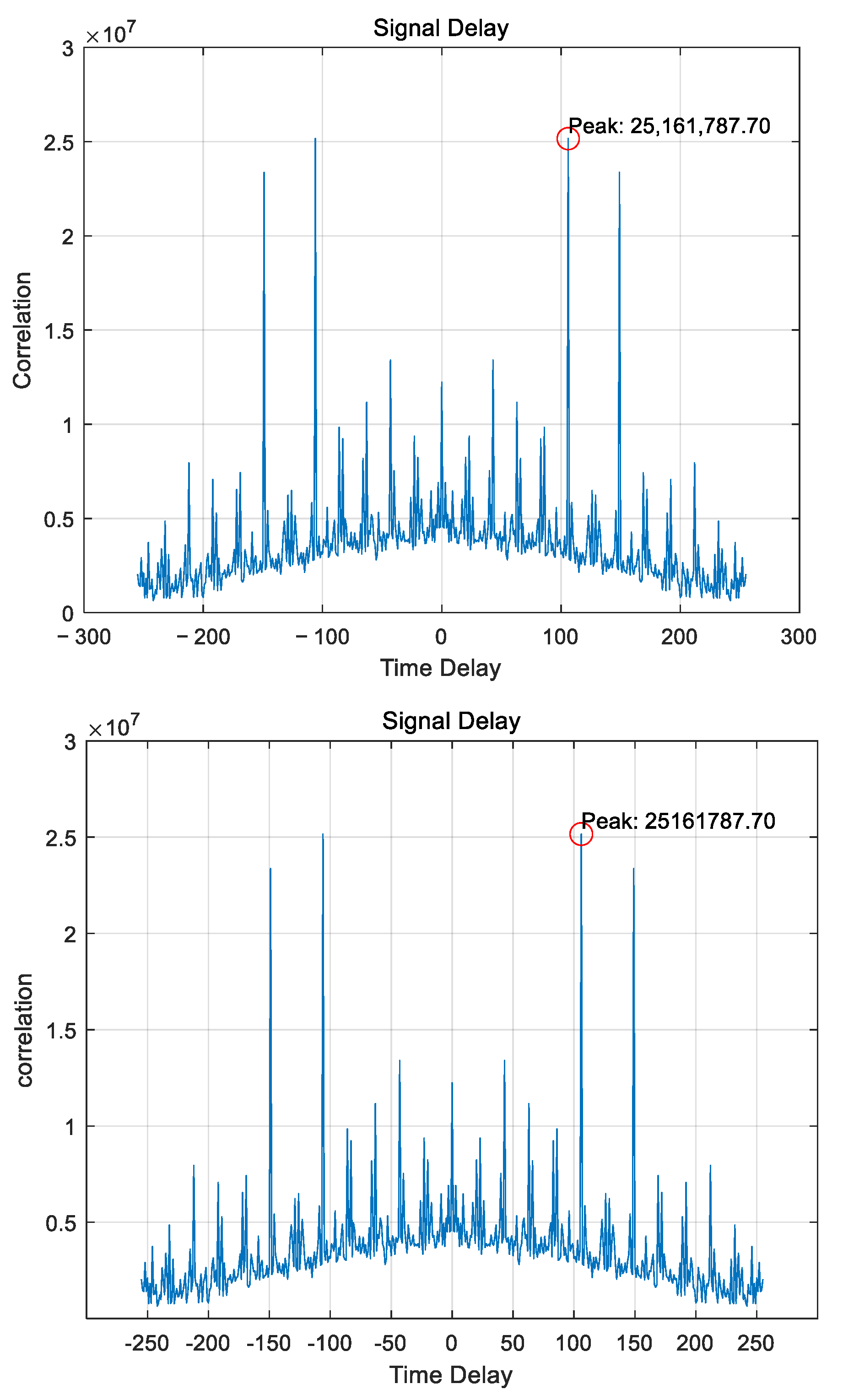
4.2.2. Optimization of the Cross-Correlation Method for Calculating the Rotation Factor
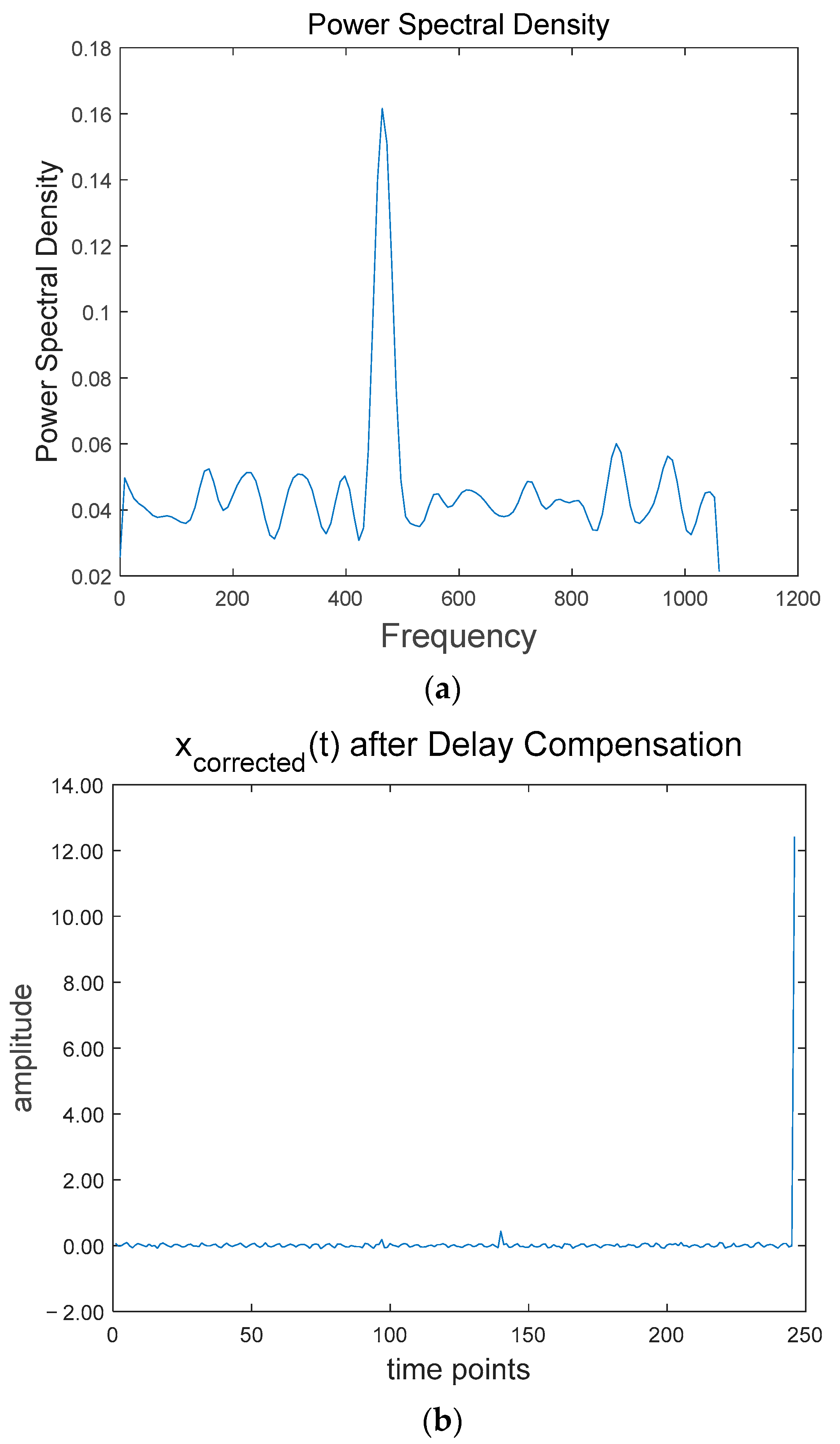
- The collected displacement signal is nonlinear and non-stationary, so the Welch method [20] is used to calculate the power spectral density:where represents the power spectral density at frequency , representing the power distribution of the signal across various frequency components. is the cross-correlation function in the frequency domain, is the length of , and is the sampling frequency (chosen to be twice the highest frequency component).
- 2.
- To calculate the signal-to-noise ratio based on signal power and noise power:
- tract the time points and amplitude values corresponding to the fundamental frequency .
- Define the fitting model:where is the amplitude, is the frequency, is time, and is the phase.
- Construct an error function to measure the difference between the fitting model and the actual data. The error function is defined as the mean square error (MSE) between the fitting model and the collected cross-correlation function data.where is the computed result of the fitting model.
- Use the least squares method for fitting by adjusting the parameters , , and in the fitting model to minimize the error function.
- Calculate the rotation factor:
4.3. Generating Delay Correction Signal Based on Rotation Factor
4.4. SVR Model Parameter Optimization
5. Construction and Analysis of Measurement Platform
5.1. Radar Selection
5.2. Piston Accumulator Piston Displacement Signal Detection and Test Verification Device
5.3. Measurement Signal Analysis
5.4. The Delay Compensation Module Analysis and Processing Are Performed
5.4.1. Analysis of Matched Filter Gain Processing
5.4.2. For the Calculation of the Rotation Factor and the Generation of the Correction Signal in Section
5.4.3. The Comparison of Parameter Optimization
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pichler, K.; Haas, R.; Kastl, C.; Plöckinger, A.; Foschum, P. Comparison of fault detection methods for a hydraulic accumulator loading circuit. In Proceedings of the 2020 IEEE Conference on Industrial Cyberphysical Systems (ICPS), Tampere, Finland, 10–12 June 2020; pp. 117–122. [Google Scholar]
- Newton, G.F.; Aondona, T.I.; Chile, C.A. Design and implementation of a wireless fluid level display system using ultrasonic sensing technique. J. Eng. Res. Rep. 2020, 14, 30–40. [Google Scholar] [CrossRef]
- Hong, X.; Zhang, B.; Liu, Y.; Qi, H.; Li, W. Deep-learning-based guided wave detection for liquid-level state in porcelain bushing type terminal. Struct. Control Health Monit. 2021, 28, e2651. [Google Scholar] [CrossRef]
- Hu, M.; Wang, F.; Chen, L.; Huo, P.; Li, Y.; Gu, X.; Chong, K.L.; Deng, D. Near-infrared-laser-navigated dancing bubble within water via a thermally conductive interface. Nat. Commun. 2022, 13, 5749. [Google Scholar] [CrossRef] [PubMed]
- Schenkel, F.; Baer, C.; Rolfes, I.; Schulz, C. Plasma state supervision utilizing millimeter wave radar systems. Int. J. Microw. Wirel. Technol. 2023, 15, 1001–1011. [Google Scholar] [CrossRef]
- Liu, P.; Chen, Z.; Gui, W.; Yang, C. High-Precision Real-Time Detection of Blast Furnace Stockline Based on High-Dimensional Spatial Characteristics. Sensors 2022, 22, 6245. [Google Scholar] [CrossRef] [PubMed]
- Yuan, H.; Zhang, Z.; He, X.; Wen, Y.; Zeng, J. An Extended robust estimation method considering the multipath effects in GNSS real-time kinematic positioning. IEEE Trans. Instrum. Meas. 2022, 71, 1–9. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, X.; Ning, X. BER analysis of integrated WFRFT-OTFS waveform framework over static multipath channels. IEEE Commun. Lett. 2020, 25, 754–758. [Google Scholar] [CrossRef]
- Khodarahmi, M.; Maihami, V. A review on Kalman filter models. Arch. Comput. Methods Eng. 2023, 30, 727–747. [Google Scholar] [CrossRef]
- He, T.; Tian, B.; Wang, Y.; Li, S.; Xu, S.; Chen, Z. Joint ISAR imaging and azimuth scaling under low SNR using parameterized compensation and calibration method with entropy minimum criterion. EURASIP J. Adv. Signal Process. 2023, 2023, 1–20. [Google Scholar] [CrossRef]
- Ju, M.; Dai, Y.; Han, T.; Wang, Y.; Liu, X. Improved Compressed Sensing Reconfiguration Algorithm with Shockwave Dynamic Compensation Features. Shock. Vib. 2022, 2022, 4035279. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, D.; Zheng, G. Roll Eccentricity Signal Detection and Its Engineering Application Based on SFFT-IAA. Appl. Sci. 2022, 12, 8913. [Google Scholar] [CrossRef]
- Gao, S.; Xu, L.; Li, Y.; Ji, J. Roll eccentricity extraction and compensation based on MPSO-WTD and ITD. PLoS ONE 2022, 17, e0259810. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Jiang, L.; Yu, F.; Zhang, Y. Research on improving measurement accuracy of acoustic transfer function of underwater vehicle. MATEC Web Conf. 2021, 336, 01006. [Google Scholar] [CrossRef]
- Li, Y.; Wu, J.; Mao, Q.; Xiao, H. A Novel Two-Dimensional Autofocusing Algorithm for Real Airborne Stripmap Terahertz Synthetic Aperture Radar Imaging. IEEE Geosci. Remote Sens. Lett. 2023, 20, 4012405. [Google Scholar] [CrossRef]
- Cheng, T.-Y.; Wang, W.-Y.; Li, J.-S.; Guo, J.-X.; Liu, S.; Lü, J.-Q. Rotational Doppler effect in vortex light and its applications for detection of the rotational motion. Photonics 2022, 9, 441. [Google Scholar] [CrossRef]
- Teja, K.; Tiwari, R.; Mohanty, S. Adaptive denoising of ECG using EMD, EEMD and CEEMDAN signal processing techniques. J. Phys. Conf. Ser. 2020, 1706, 012077. [Google Scholar] [CrossRef]
- Gorji, R.T.; Hosseini, S.M.; Abdoos, A.A.; Ebadi, A. A hybrid intelligent method for compensation of current transformers saturation based on PSO-SVR. Period. Polytech. Electr. Eng. Comput. Sci. 2021, 65, 53–61. [Google Scholar] [CrossRef]
- Ma, Z.; Choi, J.; Yang, L.; Sohn, H. Structural displacement estimation using accelerometer and FMCW millimeter wave radar. Mech. Syst. Signal Process. 2023, 182, 109582. [Google Scholar] [CrossRef]
- Jwo, D.J.; Chang, W.Y.; Wu, I.H. Windowing techniques, the welch method for improvement of power spectrum estimation. Comput. Mater. Contin. 2021, 67, 3983–4003. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Component |
|---|---|
| 1 | Oil Port End Cap |
| 2 | Type O ring 170 |
| 3 | Retaining ring |
| 4 | cylinder liner |
| 5 | piston |
| 6 | guide belt |
| 7 | Gram circle |
| 8 | End cap of air nozzle |
| 9 | Check valve |
| 10 | washer |
| 11 | Inflatable valve assembly end cap |
| 12 | protector |
| 13 | Bolt M8 |
| 14 | Gram circle |
| Methods | MSE |
|---|---|
| SVR | 7045.88 |
| Rotation Factor and Support Vector Regression | 0.09216 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Zhou, J.; Chen, H.; Xu, B.; Shen, Z. Optimizing Accumulator Performance in Hydraulic Systems through Support Vector Regression and Rotational Factors. Processes 2024, 12, 1036. https://doi.org/10.3390/pr12051036
Xu Z, Zhou J, Chen H, Xu B, Shen Z. Optimizing Accumulator Performance in Hydraulic Systems through Support Vector Regression and Rotational Factors. Processes. 2024; 12(5):1036. https://doi.org/10.3390/pr12051036
Chicago/Turabian StyleXu, Zilong, Juan Zhou, Hu Chen, Bo Xu, and Zhengxiang Shen. 2024. "Optimizing Accumulator Performance in Hydraulic Systems through Support Vector Regression and Rotational Factors" Processes 12, no. 5: 1036. https://doi.org/10.3390/pr12051036
APA StyleXu, Z., Zhou, J., Chen, H., Xu, B., & Shen, Z. (2024). Optimizing Accumulator Performance in Hydraulic Systems through Support Vector Regression and Rotational Factors. Processes, 12(5), 1036. https://doi.org/10.3390/pr12051036