
BA-Optimized Variable Domain Fuzzy PID Control Algorithm for Water and Fertilizer Ratio Control System in Cotton Field
Abstract
:1. Introduction
2. Materials and Methods
2.1. Structural Composition of Cotton Field Water and Fertilizer Ratio Control System
2.2. Design of Variable-Domain Fuzzy PID Controller
2.2.1. Conventional PID Controller Design
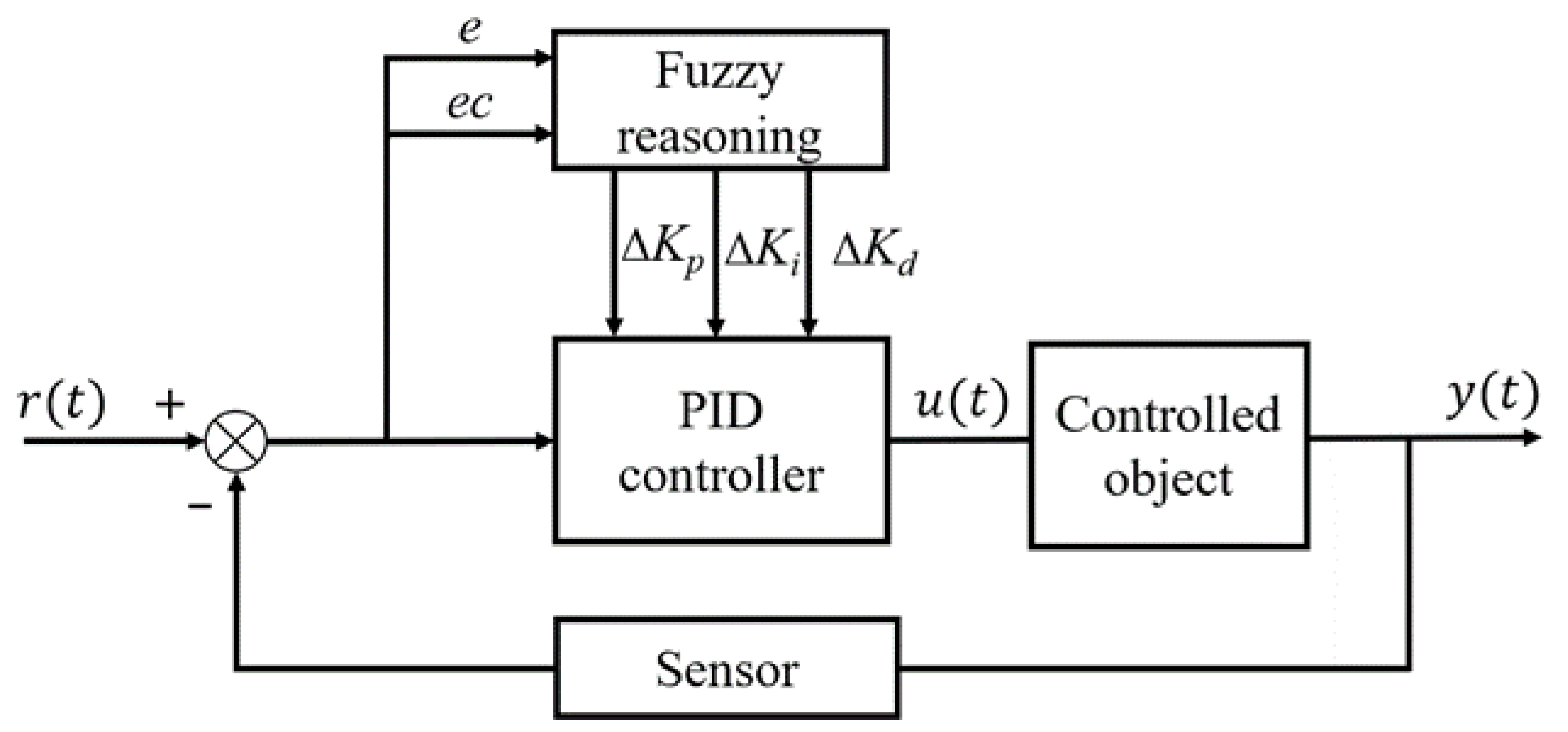
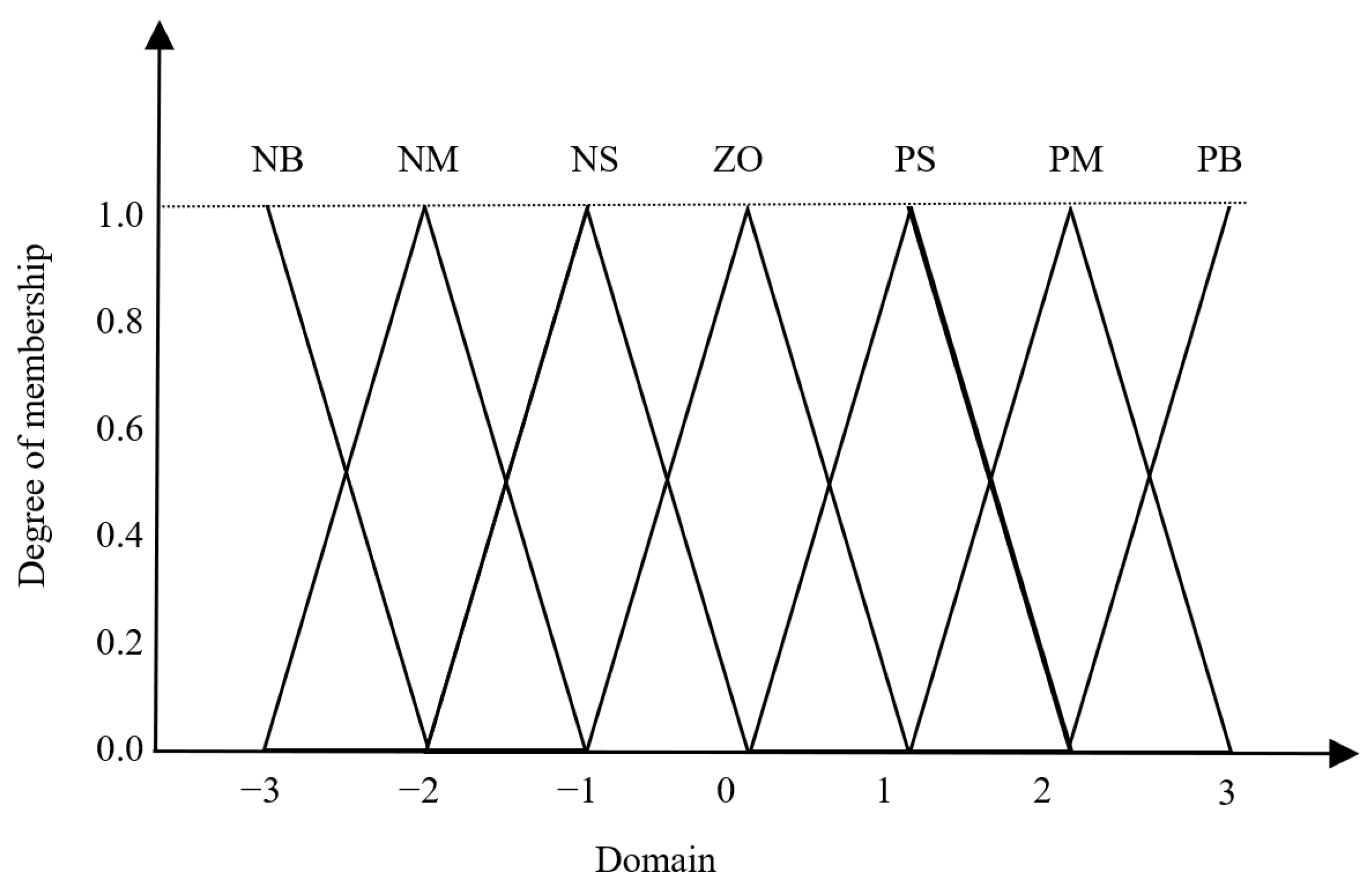
2.2.2. Fuzzy PID Controller Design
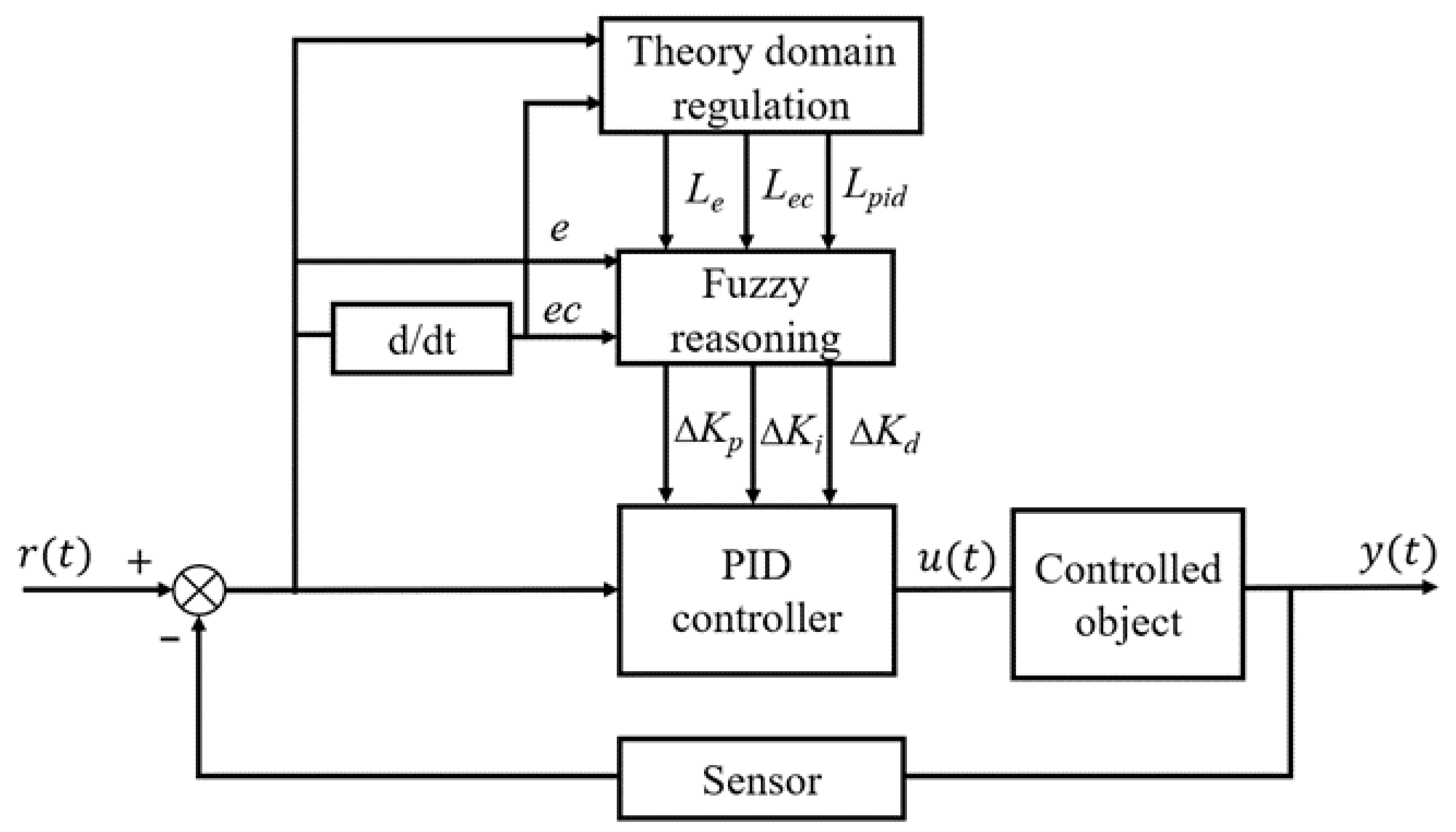
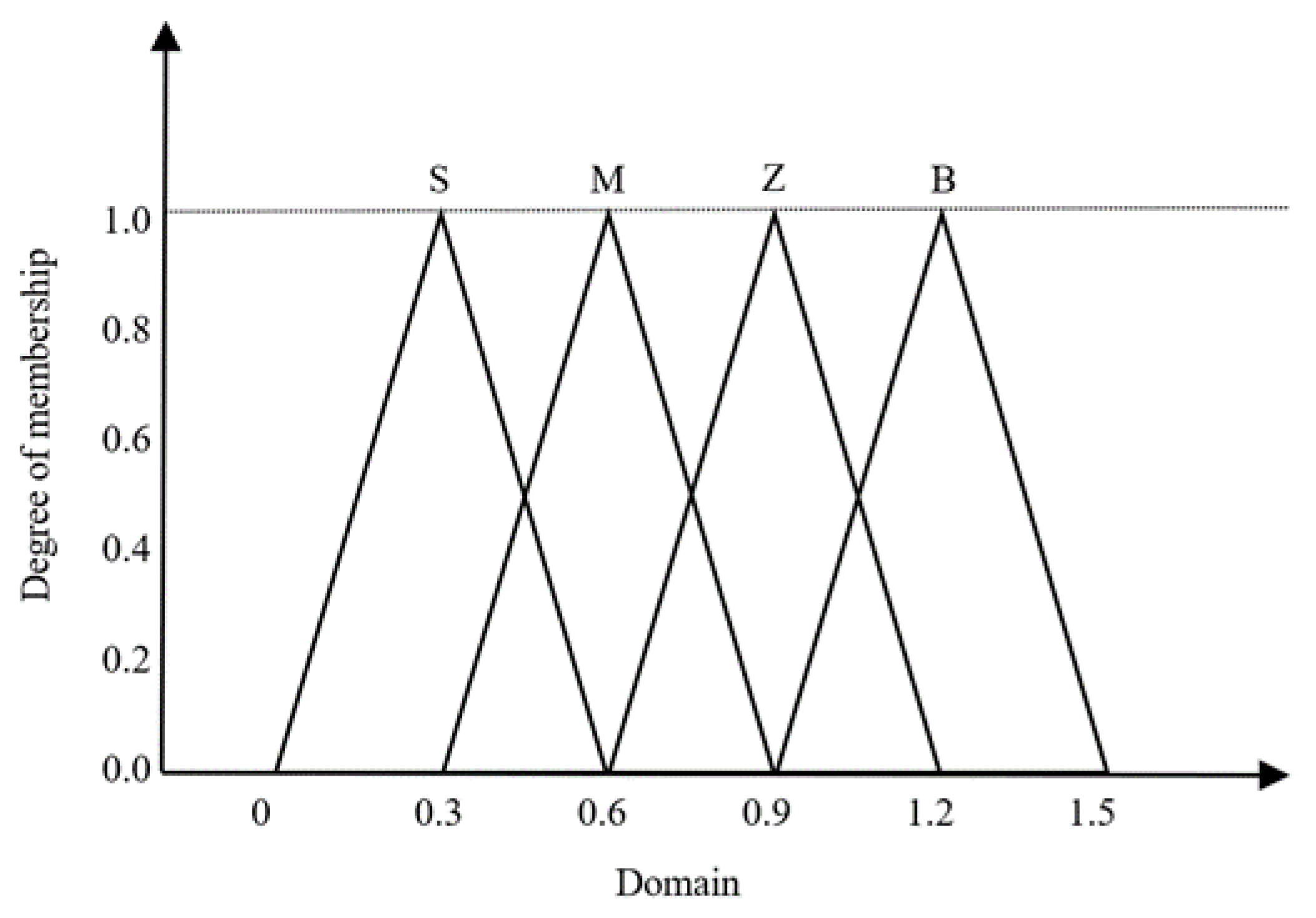
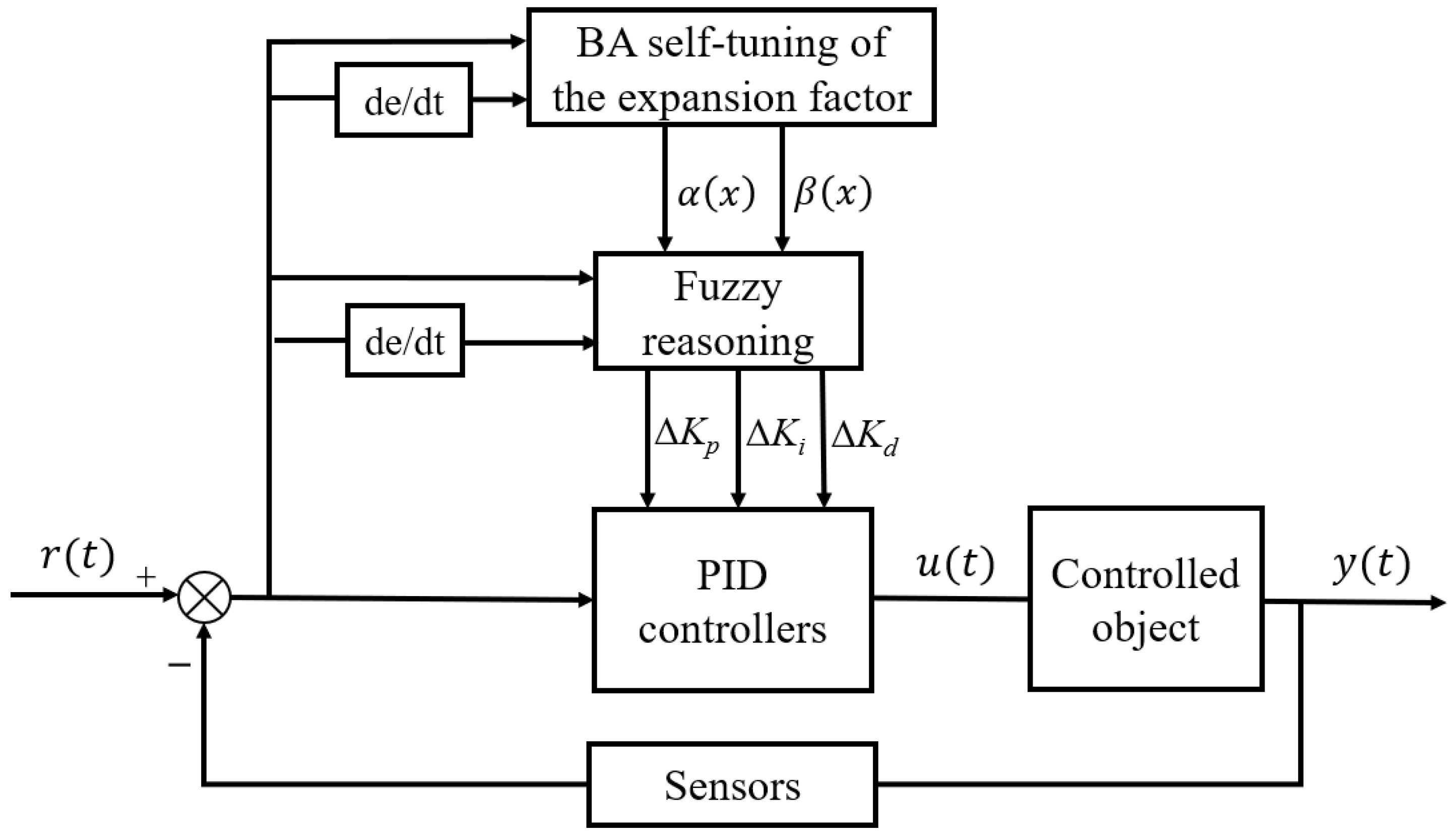
2.2.3. Variable-Domain Fuzzy PID Controller Design
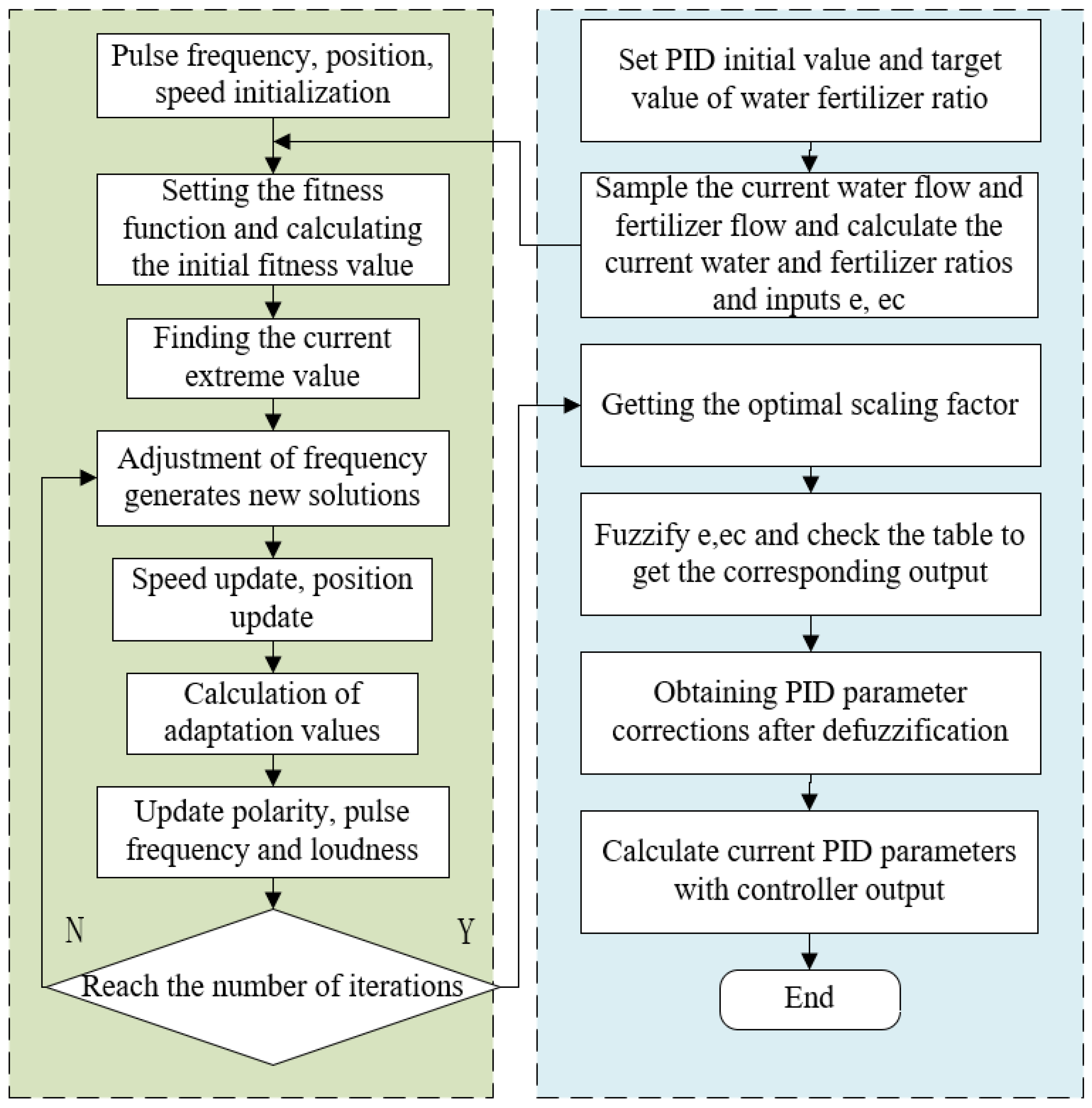
2.2.4. Design of Bat-Optimized Variable-Domain Fuzzy PID Controller
- and —the flight speed of individual bat i at t and t + 1
- and —the position of individual bat i at the time t and t + 1
- —global optimal position
- —current optimal solution
- —the new solution generated
- —a random number belonging to [−1, 1].
- —average of all bat loudness at time t
- —Loudness attenuation coefficient
- —Pulse emission frequency increase coefficient
- —the maximum pulse emission frequency of the ith bat
3. Results and Discussion
3.1. Analysis of Simulation Results
3.2. Precision Water–Fertilizer Ratio Control Test
3.2.1. Testing Device and System Design
3.2.2. Analysis of Test Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmad, U.; Alvino, A.; Marino, S. Solar Fertigation: A Sustainable and Smart IoT-Based Irrigation and Fertilization System for Efficient Water and Nutrient Management. Agronomy 2022, 12, 1012. [Google Scholar] [CrossRef]
- Zhang, M.; Li, Y.; Liu, J.; Wang, J.; Zhang, Z.; Xiao, N. Changes of soil water and heat transport and yield of tomato (Solanum lycopersicum) in greenhouses with Micro-Sprinkler irrigation under plastic film. Agronomy 2022, 12, 664. [Google Scholar] [CrossRef]
- Ren, P.; Huang, F.; Li, B. Spatiotemporal patterns of water consumption and irrigation requirements of wheat-maize in the Huang-Huai-Hai Plain, China and options of their reduction. Agric. Water Manag. 2022, 263, 107468. [Google Scholar] [CrossRef]
- Meng, F.; Hu, K.; Feng, P.; Feng, G.; Gao, Q. Simulating the Effects of Different Textural Soils and N Management on Maize Yield, N Fates, and Water and N Use Efficiencies in Northeast China. Plants 2022, 11, 3338. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, U.; Nasirahmadi, A.; Hensel, O.; Marino, S. Technology and Data Fusion Methods to Enhance Site-Specific Crop Monitoring. Agronomy 2022, 12, 555. [Google Scholar] [CrossRef]
- Silber, A.; Xu, G.; Levkovitch, I.; Soriano, S.; Bilu, A.; Wallach, R. High fertigation frequency: The effects on uptake of nutrients, water and plant growth. Plant Soil 2003, 253, 467–477. [Google Scholar] [CrossRef]
- Sun, G.X.; Li, X.; Wang, X.C.; Li, Y.B.; Chen, M.; Zhang, Y.; Yan, T.T. Design and testing of a nutrient mixing machine for greenhouse fertigation. Eng. Agric. Environ. Food 2015, 8, 114–121. [Google Scholar] [CrossRef]
- Bahat, M.; Inbar, G.; Yaniv, O.; Schneider, M. A fuzzy irrigation controller system. Eng. Appl. Artif. Intell. 2000, 13, 137–145. [Google Scholar] [CrossRef]
- Ashraf, A.; Akram, M.; Sarwar, M. Fuzzy decision support system for fertilizer. Neural Comput. Appl. 2014, 25, 1495–1505. [Google Scholar] [CrossRef]
- Meza-Palacios, R.; Aguilar-Lasserre, A.A.; Morales-Mendoza, L.F.; Rico-Contreras, J.O.; Sánchez-Medel, L.H.; Fernández-Lambert, G. Decision support system for NPK fertilization: A solution method for minimizing the impact on human health, climate change, ecosystem quality and resources. J. Environ. Sci. Health 2020, 55, 1267–1282. [Google Scholar] [CrossRef] [PubMed]
- Gomez-Melendez, D.; Lopez-Lambrano, A.; Herrera-Ruiz, G.; Fuentes, C.; Rico-Garcia, E.; Olvera-Olvera, C.; Alaniz-Lumbrerasc, D.; Fernandez, T.M.; Verlinden, S. Fuzzy irrigation greenhouse control system based on a field programmable gate array. Afr. J. Agric. Res. 2011, 6, 3117–3130. [Google Scholar]
- Sun, F.S.; Ma, W.S.; Li, H.; Wang, S.H. Research on Water-Fertilizer Integrated Technology Based on Neural Network Prediction and Fuzzy Control. IOP Conf. Ser. Earth Environ. Sci. 2018, 170, 032168. [Google Scholar] [CrossRef]
- Jamali, H.; Quayle, W.; Scheer, C.; Rowlings, D.; Baldock, J. Effect of soil texture and wheat plants on N2O fluxes: A lysimeter study. Agric. For. Meteorol. 2016, 223, 17–29. [Google Scholar] [CrossRef]
- Cao, Q.; Miao, Y.X.; Feng, G.H.; Gao, X.; Liu, B.; Liu, Y.; Li, F.; Khosla, R.; Mulla, D.J.; Zhang, F. Improving nitrogen use efficiency with minimal environmental risks using an active canopy sensor in a wheat-maize cropping system. Field Crops Res. 2017, 214, 365–372. [Google Scholar] [CrossRef]
- Bai, J.; Tian, M.; Li, J. Control System of Liquid Fertilizer Variable-Rate Fertilization Based on Beetle Antennae Search Algorithm. Processes 2022, 10, 357. [Google Scholar] [CrossRef]
- Tang, G.; Lei, J.; Du, H.; Yao, B.; Zhu, W.; Hu, X. Proportional-integral-derivative controller optimization by particle swarm optimization and back propagation neural network for a parallel stabilized platform in marine operations. J. Ocean Eng. Sci. 2022, in press. [Google Scholar] [CrossRef]
- Jia, Y.; Zhang, R.; Lv, X.; Zhang, T.; Fan, Z. Research on Temperature Control of Fuel-Cell Cooling System Based on Variable Domain Fuzzy PID. Processes 2022, 10, 534. [Google Scholar] [CrossRef]
- Qi, W.; Zhang, Z.; Wang, C.; Huang, M. Prediction of infiltration behaviors and evaluation of irrigation efficiency in clay loam soil under Moistube® irrigation. Agric. Water Manag. 2021, 248, 106756. [Google Scholar] [CrossRef]
- Marino, S.; Aria, M.; Basso, B.; Leone, A.P.; Alvino, A. Use of soil and vegetation spectroradiometry to investigate crop water use efficiency of a drip irrigated tomato. Eur. J. Agron. 2014, 59, 67–77. [Google Scholar] [CrossRef]
- Peng, Y.X.; Li, Z.Z.; Sun, T.; Zhang, F.; Wu, Q.; Du, M.; Sheng, T. Modeling long-term water use and economic returns to optimize alfalfa-corn rotation in the corn belt of Northeast China. Field Crops Res. 2022, 276, 108379. [Google Scholar] [CrossRef]
- Liang, H.; Hu, K.L.; Qin, W.; Zuo, Q.; Guo, L.; Tao, Y.Y.; Lin, S. Ground cover rice production system reduces water consumption and nitrogen loss and increases water and nitrogen use efficiencies. Field Crops Res. 2019, 233, 70–79. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Chen, S.Y.; Sun, H.Y.; Shao, L.; Wang, Y. Changes in evapotranspiration over irrigated winter wheat and maize in North China Plain over three decades. Agric. Water. Manag. 2011, 98, 1097–1104. [Google Scholar] [CrossRef]
- Hu, K.L.; Li, Y.; Chen, W.P.; Chen, D.L.; Wei, Y.P.; Edis, R.; Li, B.G.; Huang, Y.F.; Zhang, Y.P. Modeling nitrate leaching and optimizing water and nitrogen management under irrigated maize in desert oases in Northwestern China. J. Environ. Qual. 2010, 39, 667–677. [Google Scholar] [CrossRef] [PubMed]
- Monzon, J.P.; Sadras, V.O.; Andrade, F.H. Fallow soil evaporation and water storage as affected by stubble in sub-humid (Argentina) and semi-arid (Australia) environments. Field Crops Res. 2006, 98, 83–90. [Google Scholar] [CrossRef]
- Liang, H.; Hu, K.L.; Batchelor, W.D.; Qi, Z.M.; Li, B.G. An integrated soil-crop system model used for water and nitrogen management in North China. Sci. Rep. 2016, 6, 25755. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Xing, Y.; Yao, M.; Wang, J.; Guo, X.; Qin, S.; Qi, L.; Huang, F. An Improved Discrete Bat Algorithm for Multi-Objective Partial Parallel Disassembly Line Balancing Problem. Mathematics 2024, 12, 703. [Google Scholar] [CrossRef]
- Feleke, S.; Pydi, B.; Satish, R.; Kotb, H.; Alenezi, M.; Shouran, M. Frequency Stability Enhancement Using Differential-Evolution- and Genetic-Algorithm-Optimized Intelligent Controllers in Multiple Virtual Synchronous Machine Systems. Sustainability 2023, 15, 13892. [Google Scholar] [CrossRef]
- Maya-Rodriguez, M.C.; Carvajal-Mariscal, I.; López-Muñoz, R.; Lopez-Pacheco, M.A.; Tolentino-Eslava, R. Temperature Control of a Chemical Reactor Based on Neuro-Fuzzy Tuned with a Metaheuristic Technique to Improve Biodiesel Production. Energies 2023, 16, 6187. [Google Scholar] [CrossRef]
- Ogar, V.N.; Hussain, S.; Gamage, K.A.A. Load Frequency Control Using the Particle Swarm Optimisation Algorithm and PID Controller for Effective Monitoring of Transmission Line. Energies 2023, 16, 5748. [Google Scholar] [CrossRef]
- Lv, W.; Niu, W.; Gu, J.; Li, Y.; Zou, X.; Zhang, R. Effects of moistube depth and density on tomato yield and quality in solar greenhouse. Chin. J. Eco-Agric. 2016, 24, 1663–1673. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PB | PB | PS | NB | NB | NB |
| NM | PB | PB | PB | ZO | NB | NB | NB |
| NS | PB | PB | PS | NS | NB | NB | NB |
| ZO | PB | PS | ZO | NB | NB | NB | NB |
| PS | PS | PS | ZO | NB | NB | NB | NB |
| PM | ZO | ZO | NS | NB | NB | NB | NB |
| PB | ZO | ZO | NS | NB | NB | NB | NB |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | B | B | M | S | M | M | B |
| NM | B | B | M | S | S | M | B |
| NS | M | M | S | Z | Z | M | M |
| ZO | M | S | Z | Z | Z | S | M |
| PS | M | M | M | Z | S | M | M |
| PM | B | M | M | S | S | M | B |
| PB | B | B | M | S | S | B | B |
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PB | PM | PM | PS | ZO | ZO |
| NM | PB | PB | PM | PS | PS | ZO | NS |
| NS | PM | PM | PM | PS | ZO | NS | NS |
| ZO | PM | PM | PS | ZO | NS | NM | NM |
| PS | PS | PS | ZO | NS | NS | NM | NM |
| PM | PS | ZO | NS | NM | NM | NM | NB |
| PB | ZO | ZO | NM | NM | NM | NB | NB |
| Controller Type | Initial Water–Fertilizer Ratio | Target Water–Fertilizer Ratio | Rise Time (s) | Peak Time (s) | Regulation Time (s) | Maximum Overshoot |
|---|---|---|---|---|---|---|
| PID | 0:0 | 50.00:1 | 5.83 | 8.25 | 25.42 | 58.29% |
| 50.00:1 | 40.00:1 | 4.86 | 7.72 | 12.68 | 35.64% | |
| FPID | 0:0 | 50.00:1 | 12.43 | 19.62 | 32.54 | 28.83% |
| 50.00:1 | 40.00:1 | 6.96 | 9.37 | 10.59 | 3.68% | |
| VDFPID | 0:0 | 50.00:1 | 16.86 | 21.51 | 28.79 | 22.61% |
| 50.00:1 | 40.00:1 | 6.86 | 9.29 | 34.64 | 0.76% | |
| BA-VDFPID | 0:0 | 50.00:1 | 12.61 | 18.68 | 15.29 | 16.28% |
| 50.00:1 | 40.00:1 | 6.97 | 9.86 | 10.83 | 3.57% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Zhu, F.; Zhao, P.; Chen, H. BA-Optimized Variable Domain Fuzzy PID Control Algorithm for Water and Fertilizer Ratio Control System in Cotton Field. Processes 2024, 12, 1202. https://doi.org/10.3390/pr12061202
Guo Z, Zhu F, Zhao P, Chen H. BA-Optimized Variable Domain Fuzzy PID Control Algorithm for Water and Fertilizer Ratio Control System in Cotton Field. Processes. 2024; 12(6):1202. https://doi.org/10.3390/pr12061202
Chicago/Turabian StyleGuo, Zhenhua, Fenglei Zhu, Peng Zhao, and Huanmei Chen. 2024. "BA-Optimized Variable Domain Fuzzy PID Control Algorithm for Water and Fertilizer Ratio Control System in Cotton Field" Processes 12, no. 6: 1202. https://doi.org/10.3390/pr12061202