Deciphering Rod Pump Anomalies: A Deep Learning Autoencoder Approach


 ,
, 
Abstract
1. Introduction
2. Methodology
2.1. Rod Pump Data
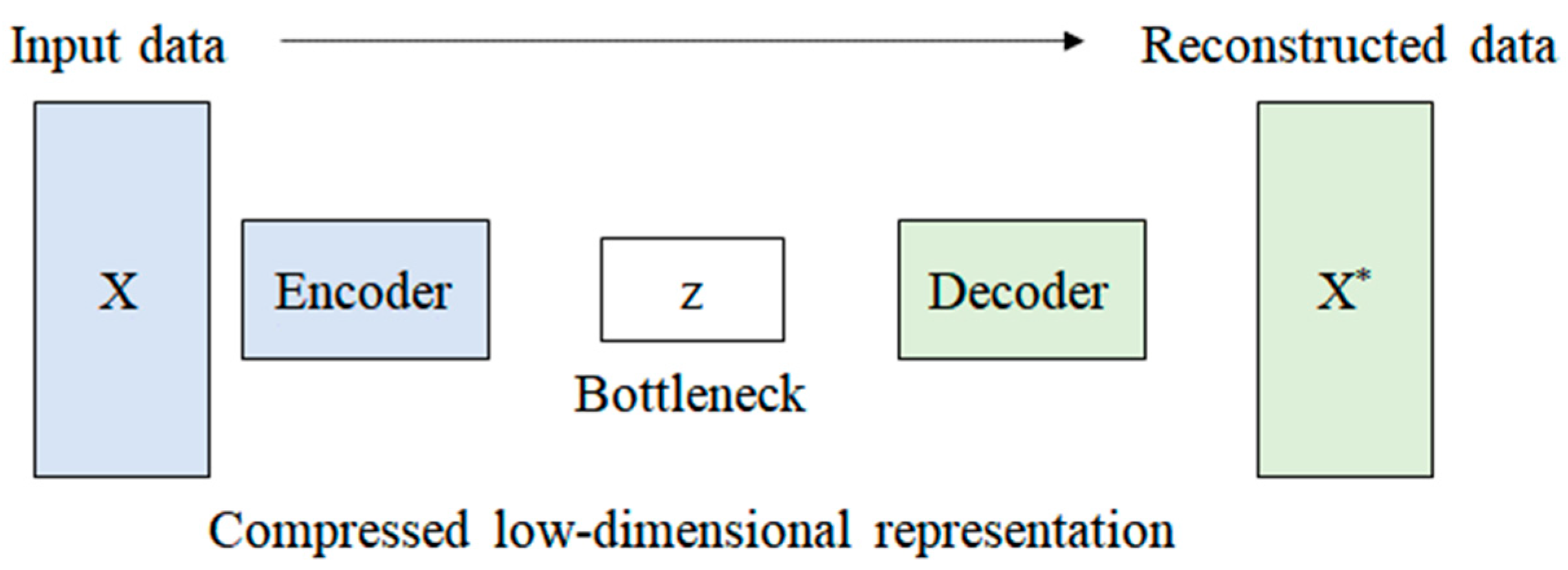
2.2. Autoencoder Model
2.3. Dynamic Threshold Calculation Method
3. Case Study
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Z.; Dong, Y.; Zheng, X.; Wang, X.; Gao, P.; Zhang, L.; Huang, Y.; Sun, W.; Zhang, P. A Deep Learning Model to Intelligently Identify the Working Status of Screw Pumps for Oil Well Lifting. In Proceedings of the SPE/IATMI Asia Pacific Oil & Gas Conference and Exhibition, Virtual, 12–14 October 2021; p. D011S009R007. [Google Scholar]
- Ramírez, C.; Espinola, O.; Álvarez, J.; Torres, A.; Avena, J.; Basilio, I.; Guerrero, C. A Digitalized New Life For a 100 Year-Old Heavy Oil Brown Field. In Proceedings of the SPE Trinidad and Tobago Section Energy Resources Conference, Port of Spain, Trinidad and Tobago, 25–26 June 2018; p. D011S007R003. [Google Scholar]
- Szladow, A.J.; Mills, D.; Yong, D. Application of Intelligent System (DES PCP) For Monitoring Progressing Cavity Pumps. In Proceedings of the Canadian International Petroleum Conference, Calgary, AB, Canada, 10–12 June 2003. [Google Scholar]
- Bangert, P. Diagnosing and Predicting Problems with Rod Pumps Using Machine Learning. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 18–21 March 2019. [Google Scholar]
- Knafl, M.; Prosper, C.; Hoday, J.; Braas, M. Diagnosing PCP Failure Characteristics Using Exception Based Surveillance in CSG. In Proceedings of the SPE Progressing Cavity Pumps Conference, Calgary, AB, Canada, 26–27 August 2013; p. SPE-165655-MS. [Google Scholar]
- Gupta, S.; Nikolaou, M.; Saputelli, L.; Bravo, C. ESP Health Monitoring KPI: A Real-Time Predictive Analytics Application. In Proceedings of the SPE Intelligent Energy International Conference and Exhibition, Aberdeen, Scotland, UK, 6–8 September 2016; p. SPE-181009-MS. [Google Scholar]
- Espin, D.A.; Gasbarri, S.; Chacin, J.E. Expert System for Selection of Optimum Artificial Lift Method. In Proceedings of the SPE Latin America/Caribbean Petroleum Engineering Conference, Buenos Aires, Argentina, 27–29 April 1994. [Google Scholar]
- Liu, Y.; Yao, K.; Lenz, T.L.; Olabinjo, L.; Seren, B.; Seddighrad, S.; Babu, C.G.D. Failure Prediction for Rod Pump Artificial Lift Systems. In Proceedings of the SPE Western Regional Meeting, Anaheim, CA, USA, 27–29 May 2010. [Google Scholar]
- Liu, Y.; Yao, K.-T.; Raghavenda, C.S.; Wu, A.; Guo, D.; Zheng, J.; Olabinjo, L.; Balogun, O.; Ershaghi, I. Global Model for Failure Prediction for Rod Pump Artificial Lift Systems. In Proceedings of the SPE Western Regional & AAPG Pacific Section Meeting 2013 Joint Technical Conference, Monterey, CA, USA, 19–25 April 2013; p. SPE-165374-MS. [Google Scholar]
- Boguslawski, B.; Boujonnier, M.; Bissuel-Beauvais, L.; Saghir, F.; Sharma, R.D. IIoT Edge Analytics: Deploying Machine Learning at the Wellhead to Identify Rod Pump Failure. In Proceedings of the SPE Middle East Artificial Lift Conference and Exhibition, Manama, Bahrain, 28–29 November 2018; p. D021S004R001. [Google Scholar]
- Zukoski, E.E. Influence of Viscosity, Surface Tension, and Inclination Angle on Motion of Long Bubbles in Closed Tubes. J. Fluid Mech. 1966, 25, 821–837. [Google Scholar] [CrossRef]
- Chen, Y.-T.; Zhang, D.-X.; Zhao, Q.; Liu, D.-X. Interpretable Machine Learning Optimization (InterOpt) for Operational Parameters: A Case Study of Highly-Efficient Shale Gas Development. Pet. Sci. 2023, 20, 1788–1805. [Google Scholar] [CrossRef]
- Siddique, M.F.; Ahmad, Z.; Kim, J.-M. Pipeline Leak Diagnosis Based on Leak-Augmented Scalograms and Deep Learning. Eng. Appl. Comput. Fluid Mech. 2023, 17, 2225577. [Google Scholar] [CrossRef]
- Bangert, P. Predicting and Detecting Equipment Malfunctions Using Machine Learning. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 18–21 March 2019. [Google Scholar]
- Hasan, A.R.; Kabir, C.S. Predicting Multiphase Flow Behavior in a Deviated Well. SPE Prod. Eng. 1988, 3, 474–482. [Google Scholar] [CrossRef]
- Ma, H.; Han, G.; Peng, L.; Zhu, L.; Shu, J. Rock Thin Sections Identification Based on Improved Squeeze-and-Excitation Networks Model. Comput. Geosci. 2021, 152, 104780. [Google Scholar] [CrossRef]
- Rathnayake, S.I.; Firouzi, M. Statistical Process Control for Early Detection of Progressive Cavity Pump Failures in Vertical Unconventional Gas Wells. In Proceedings of the 2021 Asia Pacific Unconventional Resources Technology Conference, Unconventional Resources Technology Conference, Online, 16–18 November 2021. [Google Scholar]
- Khadav, S.; Agarwal, S.; Kumar, P.; Pandey, N.; Parasher, A.; Kumar, S.; Agarwal, V.; Tiwari, S. System Run Life Improvement for Rod Driven PCP in High Deviation Well. In Proceedings of the SPE Artificial Lift Conference and Exhibition-Americas, The Woodlands, TX, USA, 28–30 August 2018; p. D012S002R004. [Google Scholar]
- Hasan, A.R.; Kabir, C.S. Two-Phase Flow in Vertical and Inclined Annuli. Int. J. Multiph. Flow 1992, 18, 279–293. [Google Scholar] [CrossRef]
- Al-shammari, B.S.; Rane, N.; Ali, S.M.; Sultan, A.A.; Al Sabea, S.H.; Al-naqi, M.; Pandey, M.; Solaeche, F.L. Using Real-Time Data and Integrated Models to Diagnose Scale Problems and Improve Pump Performance. In Proceedings of the SPE Middle East Oil and Gas Show and Conference, Manama, Bahrain, 15 March 2019; p. D032S085R003. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Anomaly Detection Model Prediction Time | True Failure Time |
|---|---|---|
| Well A | 20 July 2023 08:30 | 21 July 2023 10:00 |
| Well B | 14 August 2023 14:15 | 15 August 2023 16:00 |
| Well C | 10 September 2023 20:00 | 11 September 2023 01:30 |
| Well D | 02 November 2023 18:00 | 05 November 2023 15:20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Ma, H.; Zhang, X.; Xiang, X.; Shi, J.; Liang, X.; Zhao, R.; Han, G. Deciphering Rod Pump Anomalies: A Deep Learning Autoencoder Approach. Processes 2024, 12, 1845. https://doi.org/10.3390/pr12091845
Wang C, Ma H, Zhang X, Xiang X, Shi J, Liang X, Zhao R, Han G. Deciphering Rod Pump Anomalies: A Deep Learning Autoencoder Approach. Processes. 2024; 12(9):1845. https://doi.org/10.3390/pr12091845
Chicago/Turabian StyleWang, Cai, He Ma, Xishun Zhang, Xiaolong Xiang, Junfeng Shi, Xingyuan Liang, Ruidong Zhao, and Guoqing Han. 2024. "Deciphering Rod Pump Anomalies: A Deep Learning Autoencoder Approach" Processes 12, no. 9: 1845. https://doi.org/10.3390/pr12091845
APA StyleWang, C., Ma, H., Zhang, X., Xiang, X., Shi, J., Liang, X., Zhao, R., & Han, G. (2024). Deciphering Rod Pump Anomalies: A Deep Learning Autoencoder Approach. Processes, 12(9), 1845. https://doi.org/10.3390/pr12091845