Abstract
The energy transition relies on an increasingly massive and pervasive use of renewable energy sources, mainly photovoltaic and wind, characterized by an intrinsic degree of production uncertainty, mostly due to meteorological conditions variability that, even if accurately estimated, can hardly be kept under control. Because of this limit, continuously monitoring the operative status of each renewable energy-based power plant becomes relevant in order to timely face any other uncertainty source such as those related to the plant operation and maintenance (O&M), whose effect may become relevant in terms of the levelized cost of energy. In this frame, the use of robots, which incorporate fully automatic platforms capable of monitoring each plant and also allow effective and efficient process operation, can be considered a feasible solution. This paper carries out a review on the use of robots for the O&M of photovoltaic, wind, hydroelectric, and concentrated solar power, including robot applications for controlling power lines, whose role can in fact be considered a key complementary issue within the energy transition. It is shown that various robotic solutions have so far been proposed both by the academy and by industries and that implementing their use should be considered mandatory for the energy transition scenario.
Keywords:
robot; renewable energy; operation and maintenance; OPEX; photovoltaic; wind; CSP; hydroelectric; power lines 1. Introduction
In 2022, the global electricity demand has reached approximately 30,000 TWh, representing almost one-fifth of overall world energy consumption [1]. Even considering the best efficiency improvement in energy use, the expected energy transition evolution will lead to a more than double increase in current electric energy demand between 2025 and 2050 [2]. And, while at present about 2/3 of the electricity consumed is still produced by means of fossil sources (mainly gas and oil), the 2050 target will have to be achieved entirely using renewable energy (REN) sources and therefore, by introducing into the power grid huge amounts of photovoltaic, wind, and hydroelectric energies [1].
In this respect, it is of value to underline that in some countries where the use of renewables is more advanced, problems of the electricity grid not adapting to new scenarios have been reported [2]. From this point of view, the increasing use of photovoltaic and wind energies poses a very demanding challenge. Both are, in fact, definitely volatile energy sources (1) because of their production capacity being strongly dependent on meteorological conditions and, therefore, due to the uncertainty of these, increasing as the desired time horizon for the required production forecast moves away [3,4], and (2) because their low power density per unit of surface area compared to fossil fuels imposes ordinary and extraordinary operation and maintenance schemes, which can become very critical and economically costly if we consider the intervention times required and the fact that these plants can be distributed over very large areas or, as in the case of wind farms, they can also be installed offshore [5,6].
Both of these problems translate into Capital expenditures, CAPEX and operative expenses, and OPEX costs increase. In the first case, the need to limit the effect of forecast errors or system malfunctions is coped with via the massive use of electricity storage systems and probably, for very high levels of renewable penetration, the adoption of conversion power-to-gas systems, which are today still in the development phase and impose the limitation of “labour-intensive” costs, presently making up around one-third of the CAPEX costs, by means of the use of automatic systems for the construction of the production plants themselves [7,8]. As regards to plants operation and maintenance costs (O&M), the most demanding effort is to make such phases increasingly automated, limiting as much as possible the “labour-intensive” costs, which today constitute the dominant part for this category of costs [9].
In both cases, robotics now plays an essential role. In the first case, standardization in industrial processes involving wind and photovoltaic energy has led to the possibility of designing and implementing automated systems for the construction of large plants for the production of renewable energy [10]. In the second case, studies on the development and field testing of robotic systems for the inspection and maintenance of these same systems are increasingly frequent [11].
In this work, we will essentially deal with this latter issue by reviewing the use of robots for the O&M of photovoltaic, wind, hydroelectric, and concentrated solar system plants, also including the robotic systems necessary for the control of power lines which are essential parts of the energy transition. This work is divided into seven sections. In addition to the Introduction, Section 2 contextualizes the issue under consideration within the broader theme of the necessary digitalisation of the energy sector in terms of renewable sources; Section 3 is structured into various sub-paragraphs each dedicated to robot applications for a particular REN (3.1 CSP, 3.2 photovoltaic, 3.3 wind, 3.4 hydroelectric, and 3.5 electricity lines); Section 4 discusses the robot machines from the point of view of their operational SW; Section 5 is dedicated to the database required for ML approaches to be implemented; Section 6 and Section 7 are, respectively, devoted to the discussion of the reported data and the conclusions.
2. The Energy Sector Digitalisation
The increasing use of information and communication technology (ICT) in various social, economic, industrial, and cultural sectors is at the origin of the so-called phenomenon of digital disruption, which currently also involves more and more behaviour of individuals in every part of the world and that, according to Skog and co-authors’ analysis, has to be interpreted in terms of a creative and, at the same time, destructive process that crosses every socio-economic sector [12]. Even if in a more gradual manner, according to Lea Myllykallio in [13], this is now occurring, with visible effects, in the energy sector, where the effective strong support of the pervasive and relevant use of digital technologies can be said to have actually been accelerated by the recent increasing and large adoption of renewable energies in the energy mix of most Western countries.
According to the IEA world outlook 2022, renewable energy use worldwide increased from about 15% in 2010 to 20% in 2020 and is now expected to overcome 60% in the 2050 mix [14]. Beyond the well-known environmental benefits, the most important change related to the massive use of renewable energies for electricity production is connected to the unavoidable changes in the energy trading methods as a result of their production variability due to intrinsic and site-specific weather condition forecast uncertainty. Although this issue has greatly advanced in terms of accuracy over time, it still has an intrinsic level of volatility increasing as the time horizon increases [15,16]. This has led to the introduction of a growing level of complexity in the management of energy markets, which has, in turn, forced and increasingly obliged the involved stakeholders (TSOs, producers, distributors, etc.) to move financial transactions related to this type of energy to closer and closer time horizons, such as the day-after market and, increasingly too, even the intraday market, with negotiations that tend to be increasingly characterized by correspondingly short time horizons of even just a few minutes [17]. It is clear that this type of financial market can only operate digitally, and it is also clear that as the penetration of renewable energy in a country’s energy mix increases, this type of operational methodology will become increasingly relevant. It is important to underline that the development of blockchain technologies has been and is functional within this context, and that without which, in fact, the certified volumes of energy that transactions handle would not be able to be exchanged, especially in a market increasingly made up of prosumers [18,19].
The digitalisation of energy trading has simultaneously led to an equally rapid evolution in the application of advanced machine learning techniques both to improve the precision in renewable energy production estimates, thus allowing the strict time financial contracting constraints to be relaxed, and to improve the reliability of energy production systems in terms of preventive maintenance [20]. Both such issues significantly affect the energy trading process’ reliability. In the case of ML techniques applied to forecasting, the aim is to improve precision not only by means of the use of data from satellite providers, but also taking into account data obtained from ground systems which, using appropriate training procedures, allow for significant improvements in the individual site production forecast [21]. As reported by Benti and coauthors, these techniques are characterized by a series of problems, with one of the main ones being the lack of high-quality data for the training and validation steps. Data for renewable energy forecasting are often sparse, noisy, and incomplete, which makes it difficult to build accurate models. Another challenge is the lack of transparency and interpretability in ML and DL models or the unavoidable lack of training data for new systems which poses the problem of the so-called transferring of calibration among different systems, with obvious reliability effects [22]. The ML techniques related to the optimization of the plant maintenance phase are in some ways similar and are based on very detailed knowledge of the individual renewable production plants [23,24]. These are increasingly heavily equipped with sensors that, with appropriate IoT architectures and by means of SCADA systems, allow for precise knowledge of the system state and of its evolution over time [25]. In fact, since the O&M costs of renewable plants today constitute a significant and increasing percentage of the total cost of the plants, the boost towards the use of digital technologies in the O&M field is as relevant as the trading requests in terms of supporting the diffusion of renewable digitalization [26]. From this point of view, the energy systems of countries that are implementing the transition towards non-climate-changing productions are archetypes of IoT pyramid systems, in which the lower part is made up of highly pervasive sensor arrays and the upper part is the development of automatic tools for the operation and maintenance of the systems which are the subject of this review [27].
Finally, it should be recalled that the exponential increase in information produced and exchanged in real time during the operative lifetime of a plant requires the implementation of security management techniques (cybersecurity), which are also part of the range of methodologies that are under development in terms of the digitalisation of energy systems. For example, A. Rekerahoet and coauthors have recently summarized the various cyber-attack systems on the renewable energy production plants security, some of which are extremely complex to cope with because of the high granularity of REN production systems [28].
3. Robot Applications
In the following, the use of robotics in the field of renewable energies has been divided into five different sections, namely concentrated solar power (CSP), photovoltaic (PV) energy production, wind farms, hydroelectrical plants, and finally power lines, that match five different areas of the production and dispatching of energy.
3.1. Robotics in Concentrating Solar Power (CSP)
A concentrating solar power (CSP) plant is usually composed of an array of mirror surfaces directing and concentrating the sun radiation towards a collecting device with the aim to heat a given substance to a high temperature (at least in the range of hundreds of °C) to then be subsequently used to produce electricity, usually through a steam turbine connected to an electrical power generator. Currently, the cumulative CSP capacity around the world is of about 6.5 GW, with most of the installations being in Spain and the US [29].
There are mainly four different designs:
- the parabolic trough, where a linear parabolic reflector concentrates sunlight onto a receiver positioned along the reflector’s focal line;
- the Fresnel reflectors, where the reflector is composed of many flat mirror strips arranged to reflect sunlight onto an overhanging tube;
- the solar tower, where an array of heliostats, which are dual-axis tracking reflectors, concentrate the radiation on a central receiver on top of a tower;
- the Dish Stirling, composed of a parabolic reflector concentrating light onto a receiver in the focal point of the parabola, similarly to a radio telescope.
From the robotics point of view, it is possible to hypothesize several tasks that may be operated by service robots in these plants:
- system deployment, i.e., the physical placing of the mirrors;
- mirror cleaning, in order to maximize energy production;
- plant patrolling, for security purposes;
- plant predictive monitoring, for the O&M of plant functionality;
- plant monitoring and maintenance, for issues not directly linked to the plant functionality (e.g., grass mowing or bird shooing away).
The research covered by the materials in this section spans from approximately 2011 to 2024. This range reflects the growing interest in integrating robotics into CSP plants, driven by advances in automation and the need for more efficient and sustainable energy solutions. The keywords that were used in identifying the materials are as follows: “Concentrating Solar Power Robotics” provided a comprehensive research scope to encompass all aspects of robotics in CSP plants; “Cleaning Robots” was selected because cleaning is a critical task for maintaining CSP plant efficiency; “CSP Plant Maintenance Automation” captured studies on the automation of maintenance tasks, which is vital for reducing operational costs and enhancing plant reliability; “UAV Inspection in Solar Power Plants” was included to address the increasing use of drones for inspection tasks, as highlighted by recent research; and “Robotic Systems in Solar Tower Plants” ensured that studies focused on solar towers, a prevalent CSP project, were considered. These keywords were essential for exploring how robotics and automation are applied to improve the efficiency and reliability of CSP plants.
Search fields included academic databases such as IEEE Xplore, ScienceDirect, and Google Scholar, where topics on renewable energy, automation, and robotics are frequently published. Additionally, industry reports and conference proceedings on renewable energy technologies were explored to capture the latest developments in this industry niche. An analysis of patents and research project deliverables was also conducted to fully understand the technological evolution and innovation in this field. Inclusion criteria for articles focused on studies that explicitly discuss the application of robotics in CSP plants, with a preference for empirical research and case studies that provide concrete results or prototypes. Articles were included if they addressed specific robotic tasks such as cleaning, inspection, or maintenance in CSP plants. Exclusion criteria filtered out materials that only tangentially mentioned CSP or robotics without providing significant insights into their integration, as well as those that focused on other forms of solar power generation, such as PV or robotic applications unrelated to CSP, and simple laboratory prototypes. Additionally, studies published before 2011 or those without peer review were excluded to ensure the relevance and quality of research.
In Table 1, the relation between the type of CSP plant and conceivable robotic tasks is presented. References are shown per task in the last column and per plant type in last row. As it happens, in the photovoltaic realm, the largest number of applications is in the field of mirror cleaning, which is more directly linked to its specific Levelized Cost of Electricity (LCOE).
In [30], HECTOR is described (Heliostat Cleaning Team-Oriented Robot), one of the first robotic solutions for the cleaning of heliostats in solar tower CSP plants. Its efficiency with respect to water and power permits it to be fully autonomous during the cleaning of one heliostat. The transport of the robot from one heliostat to the next is not autonomous, relying on human intervention. For a truly efficient cleaning, a team of robots should work in parallel. The motion of the robot is wheeled; thus, it is concocted for heliostats with almost horizontal poses, the guidance is performed exploiting the boundaries of the mirrors, and it is capable of avoiding broken parts of mirrors. Tested at the Gemasolar plant in Spain, it is presently commercialized by the Sener company.
An inspection climbing robot is described in [31]. This can perform inspections and maintenance on the vertical surfaces of the receiver in a solar tower CSP plant. The non-destructive testing (NDT) inspections are performed by means of eddy current measurements for corrosion, erosion, and cracking, as well as a visual one. The robot carries the sensors and is kept in contact with the tower via suction. The vertical movement is performed with the help of a crane atop the tower. Servos ensure the proper positioning of the sensors, and the load capacity is only limited by the crane. The robot weights around 300kg. The robot moves on the panels of the receiver in the tower and aligns the sensors correctly for inspection.
In a review [32] dedicated to the overall cleaning solutions for CSP plants, cleaning methods and cleaning systems are extensively covered, and three robotic solutions are cited. Besides the quoted robot [30], the PARIS robot for trough reflectors is presented [33,34], as developed by the Sener company, and a UAV-based system is reviewed [35].
The cleaning robot for Fresnel mirrors, Soltibot, developed by Soltigua, is presented in [36], a result of the EU project MinWaterCSP (2016–20) [37]. The operation of the robot is illustrated in Figure 1.

Figure 1.
Cleaning event; left: the selected collector on dirty state, right: operating cleaning robot on the day of cleaning [36].
It is worth noting that in [36], the authors measure the advantages, in terms of time and cost, of the use of the robot in a working environment.
Reference [38] is a comprehensive review of integrating UAV-based systems for the planning, operation, and maintenance of CSP plants. The main fields of application of UAV-based technologies are the characterization, aimpoint control, and calibration of the light concentrating system both for heliostats and parabolic troughs. The UAV flight path is optimized within the CSP field to collect the needed images for the planned task and to mitigate the time-of-flight problem due to limited power. It is important to note that the reviewed approaches make use of RTK GPS for the UAV positioning. Even with such RTK technology, which drops the accuracy to a few centimetres, the reconstruction of the mirrors can be insufficient since actual deviations on mirrors are usually below the millimetre level.
An interesting approach to the field inspections of heliostats is presented in [39], where the authors developed a polarimetric imaging drone, carrying out field tests at Sandia’s National Solar Thermal Test Facility and showing that Degree of Linear Polarization and Angle of Polarization images greatly enhance the edge detection results compared with the conventional visible images, supporting the fast and accurate detection of heliostat mirror edges and cracks. It also foresees possible future UAV applications in CSP plants such as the use of UAV swarms to save time, inspections for faults, land surveys for plant designs, mirror cleaning with water or air jets or with ultrasound methods, wildlife protection, and security and surveillance.
A detailed study focusing on the maintenance of the mirrors of a CSP plant is presented in [40]. This employs images taken by drones flying over the plant and shows that mirror inspection from a drone using high resolution images can yield data about soiling and mirror defects.
A cleaning robot for Fresnel mirrors and collectors, named Frenell, by the Frenell company is presented in [41]. In the same paper, another robot for Fresnel mirrors, produced and commercialized by SUNCNIM, is also presented. It is interesting to note that the SUNCNIM company designs, builds, and operates solar plants with energy storage for the production of electricity and thermal energy; in this sense, the robotic aspect is a part of a whole, even if the company is currently in judicial liquidation [42].

Table 1.
Possible intersection of robotic tasks with type of CSP plant.
Table 1.
Possible intersection of robotic tasks with type of CSP plant.
| Robotic task | Parabolic Trough | Fresnel | Solar Tower | Dish Stirling | References |
|---|---|---|---|---|---|
| System deployment | X | X | [42] | ||
| Mirror cleaning | X | X | X | [30,33,34,38,39,41,42] | |
| Security patrolling | X | X | X | X | |
| Monitoring O&M | X | X | X | X | [31,35,36,37] |
| Non energy monitoring | X | X | X | X | |
| References | [33] | [34,38,39] | [30,31,35,36,37,41,42] |
The EU’s ongoing project Durable [43] will apply disruptive aerospace, robotic, non-destructive inspection and additive manufacturing technologies to evolve towards better development in the operation and maintenance of wind and solar energy parks. In WP5, approaches for control and surveillance, such as non-destructive testing by robots (UAVs or UGVs), contact inspection (ultrasonic, thermographic), and autonomous and intelligent navigation, will be investigated and applied.
The Heliogen company (Pasadena, CA, USA) has developed ChariotAV, which combines sensors, robotics, and autonomous control software to service an entire field of heliostats independently for cleaning [44]. The follow-up has been the ICARUS robot (Installation & Cleaning Autonomous Robot & Utility Solution) [45], an autonomous vehicle with mounted LIDAR and high precision RTK GPS, able to perform the cleaning of heliostats by towing an equipped trailer and to deploy small dimension octagonal heliostats with high precision.
An innovative non-intrusive optical (NIO) approach is proposed in [46] to measure mirror surface slope error, mirror facet canting error, and heliostat tracking error based on reflection images using the natural target, the tower, in a heliostat field. The approach adopts various techniques in photogrammetry, reflectometry, and geometrical optics to determine the relative positions of the camera, tower, and heliostat. Snell’s law is applied to derive the mirror surface slope error, mirror facet canting error, and heliostat tracking error. All the images are collected with unmanned UAVs.
Briefly summarizing the above, it is possible to state that the selected papers present mainly cleaning or drone-based aerial mirror inspection systems. In addition, several robotic systems have been realized and are advertised on the world wide web, but often with outdated pages, hinting to working prototypes that are still not ready for the market. This may be due to an overly limited market. Figure 2 highlights the distribution of the research focus across different robotic tasks, showing that most of the studies are concentrated on monitoring for operation and maintenance and mirror cleaning applications, making up about 31% and 36% of the published papers; the remaining published papers focus on system deployment—9%, non energy monitoring—16%, and security patrolling—8%.
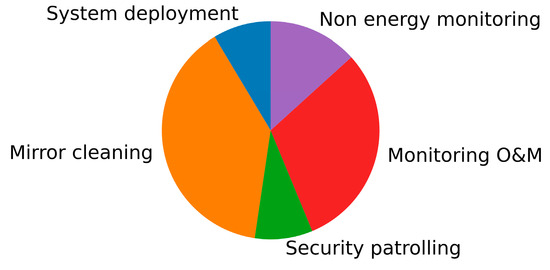
Figure 2.
Distribution of CSP research focus across different robotic tasks.
3.2. Robotics in Photovoltaic
At present, most of the applications of robotics for photovoltaic solar power plants is related to the cleaning of the panels, and various papers report a range of related innovative technologies. The exploration of the papers begins with an in-depth look at cutting-edge cleaning methods, including dry-cleaning systems, water-free solutions, and specialized robots for desert environments. Robots for inspection and maintenance, exploiting visual servoing, real-time object detection, and predictive maintenance via unmanned aerial vehicles (UAVs) and machine learning algorithms, are also receiving increasing interest. Sophisticated and intelligent robotic systems have been employed, from quadruped robotic platforms facilitating non-destructive evaluation of modular constructs, which are adept at accommodating various panel configurations. The implementation of robot details such as multi-suspension units, expertly crafted to dampen vibrations and minimize their impact, are presented. Also, cutting-edge control strategies aimed at boosting autonomy and overall effectiveness, infrared-based dust mitigation systems, and advanced navigation and control features are addressed. The aim here is to offer readers a broad overview of the diverse robotic solutions proposed to transform solar panel maintenance.
The research covered by the articles reviewed in this section was conducted between the years 2014 and 2024. This period marks significant advancements in robotics and renewable energy, especially in the application of autonomous systems in PV plants, and reflects the rapid technological progress and increasing focus on photovoltaic energy worldwide. The choice of search keywords was guided by the need to explore the intersection of robotics and PV systems, covering a range of relevant applications and functions. The keywords that were instrumental in identifying the articles selected in this review include the following: “Robotics in Photovoltaic Systems”—directly targeting the integration of robotic technology within PV systems, capturing papers that discuss the use of robots for various tasks such as cleaning, inspection, and maintenance; “Solar Panel Cleaning Robots”—cleaning panels is a key issue, so this keyword ensured the inclusion of research focused on developing robotic systems for the efficient cleaning of solar panels; “UAV Inspection for Solar Panels”—this was essential for identifying articles that investigate the use of UAVs for inspecting solar panels, reflecting a growing interest in this area of photovoltaic system maintenance; “Predictive Maintenance in PV Plants”—this was aimed at the discovery of studies exploring advanced maintenance strategies, particularly those employing predictive algorithms and robotics to improve the efficiency of photovoltaic plants; “Autonomous Robots in Renewable Energy”—this broader keyword captured innovations in autonomous robotic systems across various renewable energy sectors, with a particular emphasis on their applications within photovoltaic systems. The search focused on titles, abstracts, and keywords within databases like IEEE Xplore, ScienceDirect, and Google Scholar. The inclusion of these fields was crucial for capturing the core focus of papers, ensuring relevance to the overarching theme of robotics in PV systems. The searches were conducted with filters for peer-reviewed journal articles and conference papers to maintain the quality of the selected research. Inclusion criteria were papers published in the last five years that specifically addressed the application of robotics in PV systems, including cleaning, inspection, and maintenance. Articles had to be peer reviewed and accessible in full text to be included in the review. Exclusion criteria were papers that focused on unrelated aspects of robotics or PV systems, such as purely theoretical models without practical application, studies not involving robotic systems, research focused on non-solar renewable energy technologies, or simple laboratory prototypes. Papers not available in English or lacking full-text access were also excluded to maintain consistency and depth in the review. This methodical approach ensured a focused and comprehensive selection of articles that provide valuable insights into the current state and future potential of robotics in PV systems. Table 2 organizes the materials according to the robotic tasks they address and to the application environment in PV systems they focus on.
In [47], the design and creation of a robot engineered for dry-cleaning PV solar panels to cope with efficiency losses due to dust accumulation is described. The robot includes an image processing system for colour analysis to monitor dust density, optimizing the cleaning process. Featuring a cleaning head with two cylindrical brushes powered by a 12 V DC motor, the robot’s frame is made of lightweight aluminium. The robot performs vertical and horizontal cleaning cycles, with each cycle lasting approximately 10 s, and operates on a 12 V battery recharged by a small PV panel. Controlled by an Arduino Uno microcontroller and a Bluetooth module, the robot’s effectiveness is validated by significant increases in panel efficiency post-cleaning across different dust densities.
Ref. [48] reports on the development of an autonomous and smart mobile robot system designed to enhance the maintenance efficiency of solar PV arrays by automating the cleaning process. The mobile robot is equipped with gyroscope and proximity sensors to efficiently navigate and follow the sweep path over the PV array surfaces. Utilizing a proportional integral derivative (PID) control system, the robot stabilizes its movement and maintains its path with an average stabilization time of 5.72 s. Operating in both autonomous and manual modes, it cleans a 56-square-metre PV array in approximately 13 min autonomously and in 20–24 min manually. The robot’s structure features an aluminium frame and an acrylic body and weighs 4.8 kg. It is powered by a four-cell LiPo battery, providing around 40 min of operational time. The drive system includes wheels driven by PG28-type motors, allowing for six degrees of freedom in movement. Each sweeper roller, equipped with GW4632-370 motors and nylon tassels, rotates at 150 RPM to efficiently clean the panels, with proximity sensors preventing falls. This innovative design significantly reduces the effort, cost, and risk associated with the manual cleaning of solar arrays, improving the overall efficiency of PV power plants.
Ref. [49] describes the development and implementation of an autonomous robot designed to clean PV panels in desert environments, addressing the issue of dust and sand accumulation that can reduce efficiency by up to 80%. Using a waterless cleaning method, the robot operates without the need for rails or guides and features two independently motorized helical brushes that rotate to remove dust and sand from the panels. Moving horizontally along the PV array, the robot activates only the brush facing the direction of movement to prevent the re-deposition of cleaned sand. Key components include ultrasonic sensors for real-time speed and position regulation, high-friction rubber belts for smooth movement on uneven surfaces, and an Arduine DUE platform for managing movement and brush activation. The robot’s design innovations, such as the elimination of guide rails and a controlled brush system, ensure effective dust removal and low power consumption. Experimental tests validate its effectiveness.
Ref. [50] discusses a robotic system optimized for cleaning solar panels, focusing on dust accumulation. This autonomous robot uses a combination of brushes and vacuum mechanisms to remove dust, navigating PV arrays with sensors to detect panel edges and avoid obstacles. It follows a predefined path for systematic coverage and docks at a charging station when necessary. Through multiple testing sessions, parameters such as brush speed, vacuum suction, and movement speed are optimized, resulting in significant improvements in cleaning performance. The optimized robot enhances PV efficiency by maintaining cleanliness, increasing power output and longevity.
Ref. [51] describes an automated robotic system for dry-cleaning solar panels in Thuwal, Saudi Arabia, using a silicone rubber brush, shown in Figure 3. The robot, weighing 36 kg, operates daily at dawn to minimize sunlight obstruction and efficiently removes overnight dust accumulation. Field tests using a 10 kW PV system showed that the robot’s daily cleaning outperformed weekly manual cleaning, demonstrating its low-cost, reliable solution for maintaining solar panel cleanliness in arid regions.
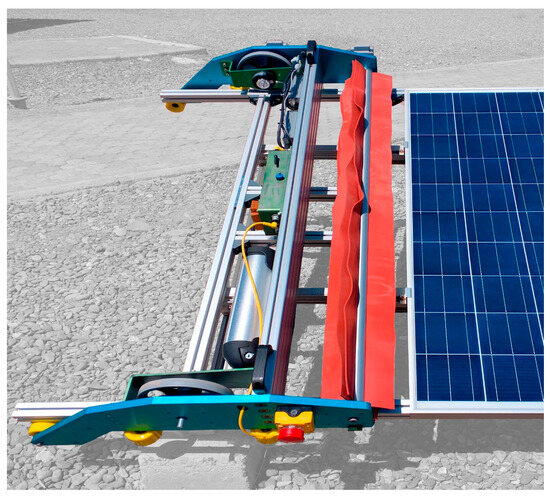
Figure 3.
The robotic cleaning system as installed in the test field [51].
Figure 4 shows the comparison of electroluminescence images of a solar panel before and after driving across and brushing the panel surface for 1000 cleaning cycles; the image recorded after the cycles does not reveal any micro-cracks or broken cells, indicating that the quality of the solar cells was preserved.
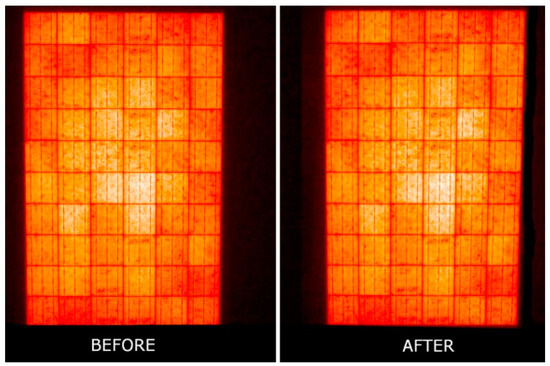
Figure 4.
Comparison of electroluminescence of solar panel after cleaning solar module for 1000 cycles (from [51]).
Ref. [52] presents a novel water-free cleaning robot for distributed PV systems in water-scarce areas. The lightweight robot, equipped with a negative pressure adsorption system and independent wheels, can clean inclined surfaces up to 30 degrees. It uses a rolling brush and negative pressure dust removal system, achieving high cleaning efficiency without secondary pollution. The robot’s design includes PWM-controlled motors to prevent vibrations, ensuring effective dust collection and enhancing PV panel performance.
Ref. [53] details the development of the robot “UTU”, a compact, mobile device designed to clean solar panels by removing dirt and dust. The UTU robot features a water suction mechanism, roller brushes, tank track wheels, and a 3D-printed cover. It uses IR sensors and a 9-DOF sensor for edge detection and navigation. The robot can be controlled via a mobile application, allowing for remote monitoring and operation. The UTU robot’s advanced technology and operating algorithm ensure thorough and efficient cleaning, making it suitable for solar panels in hard-to-reach areas.
Ref. [54] discusses an autonomous solar panel cleaning robot equipped with rubber wheels for non-slip omnidirectional rotation. It features an air vacuum system to remove dust from panel surfaces and operates without cable or water pipe connections. The robot harnesses its energy through a flexible solar panel and can be controlled manually or operate autonomously. Its efficient dust removal system and autonomous capabilities make it a practical solution for maintaining solar panel efficiency, especially in water-scarce areas.
Ref. [55] focuses on the use of UAVs equipped with a visual serving control system integrated with nonlinear model predictive control (NMPC) for inspecting PV arrays. Using a DJI Matrice 100, the UAV accurately tracks the middle of PV arrays at various velocities and heights, ensuring detailed image acquisition during low-altitude flights. The system extracts features from RGB-D images and uses a Kalman filter to estimate PV array edges, allowing for precise positioning which is critical for high-quality image capturing and necessary for expert analysis or AI-based fault detection. Validated in both simulated and real-world conditions, the system reduces useless data and improves image resolution, enhancing the efficiency of PV array inspections through real-time feature extraction and control execution.
Ref. [56] explores using UAVs equipped with a keypoint-based object detection framework for the real-time inspection of solar farms. Utilizing the NVIDIA AGX Jetson Orin platform, the UAVs achieve up to 60 frames per second at a 1024 × 1376 resolution, ideal for quick and accurate industrial inspections. The UAVs detect the vertices of solar panels, estimating their six degrees of freedom (6-DOF) pose, and autonomously detect defects and anomalies, facilitating efficient inspections. By integrating UAVs with advanced object detection frameworks, the system enhances accessibility, reduces costs, improves safety, and enables real-time data processing for proactive maintenance, thereby improving solar farm inspections.
Ref. [57] discusses a system for the automatic detection, classification, and localization of defects in large PV plants using UAVs equipped with IR and RGB imaging. The Mavic 2 Enterprise Advanced UAV captures thermal images with a 640 × 512 resolution and RGB images with an 8000 × 6000 resolution. The system captures IR images to detect thermal defects and RGB images for surface defects on PV modules. Tasks include image capturing, defect detection, image stitching and processing, defect classification using a convolutional neural network (CNN), defect localization, and data cross-validation between IR and RGB images. The UAV-based system enhances image features through techniques like Max Pooling and local response normalization, achieving high classification accuracy and facilitating maintenance by accurately identifying and recording defect locations. This system proves to be a valuable tool for efficiently maintaining large-scale PV plants.
Ref. [58] discusses the development of a UAV inspection system for the preventive maintenance of solar farms using a DJI Tello quadrotor. Equipped with various sensors and camera vision technologies, this cost-effective platform enables several machine vision capabilities. Tasks performed by the UAV include autonomous navigation using image filtering, edge detection through OpenCV, and visual odometry for trajectory detection. It employs TensorFlow’s object detection API with MobileNets and Single Shot Detector architecture to detect and classify solar panel defects in real-time, such as glass breakage, dust shading, bird droppings, snow, and leaves. The system also classifies solar panel types and performs precision landing on a wireless charging pad using augmented reality markers. Additionally, the system provides real-time monitoring, logs detected defects, and maps the inspection route, displaying crucial parameters through a GUI interface. This UAV inspection system offers enhanced mobility, reduced time and costs, and improved coverage and efficiency in solar farm maintenance.
Ref. [59] discusses a water-free cleaning robot designed for dust removal from PV panels in water-scarce areas. The robot uses a wheeled mechanism and negative pressure adsorption system to adhere to and clean panels with a tilt angle of up to 30 degrees. It employs a rolling brush and high-speed centrifugal fan for efficient dust collection. Weighing no more than 8 kg, the robot can traverse obstacles and cover a cruising distance of up to 200 m. Field tests demonstrated a significant improvement in PV system efficiency, making it a practical solution for maintaining optimal power generation.
Ref. [60] examines the deployment of the Boston Dynamics Spot robot for the non-destructive evaluation (NDE) of renewable energy infrastructures. Equipped with tools such as thermographic cameras, LIDAR, ultrasonic transducers, and acoustic cameras, the quadruped robot is capable of inspecting not only PV installations but also other infrastructures, such as hydroelectric plants and wind turbines. The robot performs the periodic monitoring and inspection of critical components in hazardous or hard-to-reach areas, enhancing safety and efficiency. It autonomously inspects hydro plant components and performs detailed analysis using thermographic and LIDAR measurements. The integration of IoT and machine learning technologies enables predictive maintenance and fault prevention, and it has been conceived to incorporate, in the future, drones and humanoid robots to further enhance capabilities and eliminate human presence in hazardous zones.
Ref. [61] addresses the challenge of vibrations caused by solar panel cleaning robots (SPCRs), which can lead to microcracks in silicon cells and deform PV panels, reducing their lifespan and efficiency. The study proposes a multi-suspension unit designed to dampen vibrations and shocks, including dampers and shock absorbers to minimize dynamic loads. Inspired by tank track suspensions, the unit features adjustable spring mechanisms ensuring proper contact between the robot’s track wheels and the PV panels. Experimental setups show a significant decrease in panel deflections and improved PV system durability. This development enhances SPCR design, addressing vibration and pressure impacts, thereby extending the longevity and operational efficiency of PV panels.
Ref. [62] discusses the development of a modular robot designed to clean various lengths of solar panels, addressing the need for an efficient and adaptable cleaning solution. The robot uses a universal module for transmission and manipulation, adapting to different solar panel configurations and sizes, ranging from 1 to 4 m. The primary cleaning mechanism involves water, a spiral brush, and a rubber sweeper to remove dust and dirt, enhancing power generation efficiency. The modular design provides flexibility for different types of solar panel installations, including solar farms, rooftops, and floating solar panels. In Thailand, where air pollution and agricultural activities contribute to significant dust build-up, the robot’s cleaning method improves efficiency by up to 10%. Operating autonomously, it reduces the need for manual labour and the associated costs, offering a cost-effective and efficient alternative to traditional cleaning methods such as using telescopic poles and mops. The robot’s adaptability and thorough cleaning capabilities make it particularly beneficial in environments with prevalent dust and bird droppings.
Ref. [63] discusses the design and application of an SPCR to enhance PV system efficiency by removing dust and debris. The SPCR features a dual-motor and crawler system for horizontal movement across panels and a vertical cleaning brush for thorough cleaning. An Arduino board controls the robot, utilizing limit and distance sensors to maintain designated operation areas. The SPCR includes a charging station for automatic recharging and a pulley pallet system for smooth panel transitions without additional rails, reducing material and labour costs. Constructed from lightweight aluminium sigma profiles, the SPCR is portable and easy to install, providing a cost-effective and efficient solution for maintaining solar panel cleanliness and optimizing energy output.
Ref. [64] focuses on a robotic vacuum cleaner designed for solar panels, addressing environmental challenges like panel inclination and dust removal. The robot features a two-stage cleaning mechanism, consisting of the following: a rolling brush for dust agitation and a vacuum motor for dust collection. Equipped with accelerometers and ultrasonic sensors, the robot controls orientation, detects edges, and prevents falls. It follows a reciprocating motion path for maximum coverage and docks for recharging when battery levels are low. Gripper wheels allow for the traversal of inclined surfaces, and obstacle handling capabilities enable smooth movement over panel junctions. The robot’s efficient cleaning and minimal power consumption make it a viable solution for solar panel maintenance.
Ref. [65] details IR sensor-based dust mitigation system for solar panels, operated by a robotic arm. This system addresses dust accumulation by initiating early morning cleaning, monitoring panel temperatures, and moving autonomously across panels. The robotic arm uses a silicone rubber wiper and water sprinkler for effective cleaning, achieving high efficiency with minimal water consumption. Field tests showed an average increase of 11.88% in energy output and 13.02% in module efficiency, making it a cost-effective and scalable solution for solar panel maintenance.
Ref. [66] discusses the design of an intelligent cleaning robot for solar panels, identifying two main types as follows: small-scale trackless walking robots and large-scale crossing track walking robots. The robot features two strip brushes and one rolling brush for enhanced cleaning, capable of climbing slopes and handling height differences between panels. It includes replaceable soft and hard brushes for different types of dirt. The robot’s design addresses limitations such as battery power, transportation convenience, and wind resistance, making it a versatile and effective solution for maintaining solar panel cleanliness and efficiency. Figure 5 highlights the distribution of the research focus across different robotic tasks within the articles, showing that most of the studies are concentrated on robotic cleaning solutions for PV systems. In detail, about 33% were related to cleaning issues, followed by inspection—18%, general maintenance—13%, control strategies—9%, predictive maintenance—9%, vibration mitigation—9%, and modular adaption—9%.
Table 2.
Relationship between robotic tasks and application environments in PV systems, with references to the papers.
Table 2.
Relationship between robotic tasks and application environments in PV systems, with references to the papers.
| Robotic Task | Desert Env. | Water-Scarce Areas | Large PV Plants | Distributed PV Systems | Hard-to-Reach Areas | General/ Multiple Env. | References |
|---|---|---|---|---|---|---|---|
| Cleaning | X | X | X | X | X | X | [47,48,49,50,51,52,53,54,55,57,59,62,64,66] |
| Inspection | X | X | X | [53,54,55,56,57,58,60] | |||
| Maintenance | X | X | X | [51,57,58,60,63,66] | |||
| Vibration Mitigation | X | [50,61] | |||||
| Modular Adaptation | X | [56,62] | |||||
| Control Strategies | X | [58,61,65] | |||||
| Predictive Maintenance | X | [60,63] | |||||
| References | [49,55,62] | [52,54,59] | [48,53,57,58,60,63,64] | [51,52,63,66] | [53,66] | [47,50,55,56,57,58,60,61,62,63,65] |
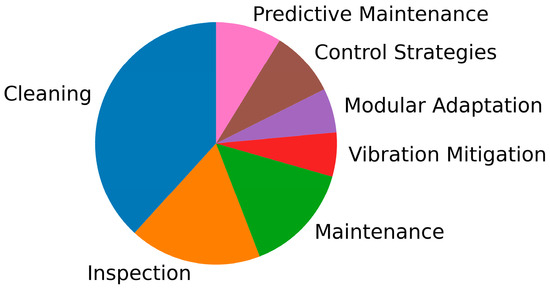
Figure 5.
Distribution of PV research focus across different robotic tasks.
3.3. Robotics for the Wind Farms
The present global wind power capacity is 743 GW (2021) [67], relying on wind farms that can be installed either onshore or in shallow water. Therefore, different robotic tasks may be considered as follows:
- (a)
- the system monitoring and maintenance: made with aerial unmanned vehicles, crawlers/climbers, or underwater robots;
- (b)
- the system manufacturing or assembly: made with the help of robots for rotor blade inspection or to assist the assembly of parts into a wind tower;
- (c)
- system security and surveillance.
The research across the articles of this section was conducted within a specific timeframe, predominantly between 2020 and 2023. This period reflects recent advancements in robotics, particularly in response to the growing demand for efficient and reliable wind farm operations.
The keywords that were instrumental in identifying the articles include the following: “Robotic Inspection”, a key task that enhances efficiency and accuracy in detecting defects, corrosion, or other issues, crucial for maintaining the safety and performance of wind farms; “Wind Turbine Maintenance”, which helped narrow down research focused on maintaining turbines, especially in challenging environments such as offshore locations; “Autonomous Systems”, the use of autonomous robots is a growing trend in wind farm operations, with these systems able to perform inspections, maintenance, and even some manufacturing tasks independently; “Offshore Wind Farms”, which facilitated the identification of studies related to the operation and maintenance of offshore turbines; “Blade Inspection”, which captured studies discussing techniques and robots specifically designed to inspect large and often hard-to-reach surfaces, where accurate inspection is essential for extending the lifespan of turbines and preventing costly failures; “Non-Destructive Testing (NDT)”, which is crucial for inspecting wind turbine components without causing damage, allowing robots using NDT to provide detailed assessments of turbine components while they remain in operation, making this keyword highly relevant for capturing articles on advanced inspection technologies.
Searches were conducted in scientific databases such as IEEE Xplore, ScienceDirect, SpringerLink, and Google Scholar to ensure the inclusion of both academic and applied research. The inclusion criteria focused on papers published within the last five years to ensure relevance to current technology trends. Only peer-reviewed articles were considered to maintain a high standard of quality. The focus was on research explicitly addressing robotic applications in wind farms, excluding papers that discussed wind energy in general without a robotics focus. Additionally, articles were excluded if they present simple laboratory prototypes or if they did not provide the experimental validation or practical application of the discussed technologies, ensuring that the selected papers contributed tangible insights to the field. Table 3 presents a categorization of robotic tasks in wind farms across different applications and technological approaches.
In [68], an imaginative view in which heterogeneous robotic assets, underpinned by AI agent technology, coordinate their behaviour to autonomously inspect, maintain, and repair offshore wind farms over long periods of time and unstable weather conditions is discussed. They cooperate with onshore human operators, who supervise the mission at a distance via the use of shared deliberation techniques. Several challenging research directions in this context are highlighted, and ambitious ideas to tackle them as well as initial solutions are offered. The foreseen robotic solutions are autonomous surface vessels, unmanned aerial systems, and crawling robots.
The development and experimental validation of a complex maintenance system consisting of multiple robotic platforms for a variety of tasks, such as a wind turbine tower and rotor blade service, is described in [69]. As sketched in Figure 6, drones equipped with vision and LIDARs are used for global inspection and to guide slower climbing robots. Localization was enabled by adapting odometry for conical-shaped surfaces considering additional navigation sensors. A prototype of a magnetic robot for NDT and manipulation is also presented. All the robotic platforms run the Robot Operating System (ROS), and a neural network AI approach has been implemented for the detection of the corrosion of welding lines in images.

Figure 6.
Wind farm maintenance vision, flying and climbing robots [69].
In [70], a novel framework for acquiring visual data around 3D infrastructures by establishing a team of fully autonomous Micro Aerial Vehicles (MAVs) with robust localization, planning, and perception capabilities is presented. The proposed aerial system reaches a high level of autonomy on a large scale while nearing the real-life deployment of aerial robotics. It mainly employs cameras to take visual data for a structure from a motion pipeline for the 3D reconstruction of the wind turbines. The problem of accurate position measurements of MAVs has been tackled with the use of Ultra-Wide Band (UWB) distance measurements and IMU sensor fusion.
The research work on a new shearography design for integration with a robotic climber for on-site wind turbine blade inspection is presented in [71]. Shearography is an optical technique in the field of non-destructive testing (NDT) of various materials. Its main advantages are that it is noncontact and can cover a large area in a single inspection. It has been widely acknowledged as an effective technique, particularly for the NDT of composite materials to detect subsurface defects such as delamination, disbond, cracks, and impact damages. The sensor is mounted on board a climbing robot that is available on the market and is tested on site.
A robotic platform used for the inspection of rotor blades during manufacturing is presented in [72]. The autonomous robot is equipped with a robotic arm carrying the following sensors needed for blade inspection: an RGB-D camera and a radar module that works at 80 GHz with a 24 GHz bandwidth. The focus of the paper is on the control of the autonomous mobile manipulator. It provides insights into related research fields, including autonomous navigation and surface orthogonal motion planning. The presented methods are applicable to various tasks related to large-scale inspection.
The design and development of a scaled down prototype of a climbing robot for wind turbine maintenance to perform critical tower operations is presented in [73]. This maintenance robot’s interesting feature is a winding mechanism, which uses a tension force to grip onto the tower surface either in static or dynamic situations. The robot is composed of two parenthesis-like halves connected with two wires at the tips, with the above winding mechanism whose tension allows the necessary grip to perform a straight up–down locomotion.
In [74], an autonomous multirobot system which can transport, deploy, and retrieve a wind turbine blade inspection robot using an unmanned aerial vehicle (UAV) is presented. The proposed solution is a fully autonomous system including a robot deployment interface for deployment, a mechatronic link-hook module (LHM) for retrieval, both installed on the underside of a UAV, a mechatronic on-load attaching module installed on the robotic payload, and an intelligent global mission planner. The mentioned robotic payload is the BladeBug MKII, an inspection, maintenance, and repair (IMR) blade crawler robot. Field tests are provided for the different aspects of deployment, retrieval, and operation.
In [75], a crawler-type climbing robot system for measuring the paint film thickness of offshore wind turbine towers is presented. The robot is magnetically linked to the tower and moving on tracks. An interesting feature is its being waterproof, allowing for the monitoring of the submerged parts of the towers. Besides the theoretical model and dynamic simulation, tests and experiments with a working prototype are also provided.
In [76], the use of mobile robotic assistants for the partial automation of wind turbines manufacturing is proposed. The robotic assistant can result in reduced production costs and better working conditions. The article presents the development of a robot assistant for human operators to effectively perform the assembly of wind turbines. The case is from a world’s leading wind turbine manufacturer. The developed system is also applicable to other cases of large component manufacturing involving intensive manual effort.
In [77], several methods for robot-based damage detection and evaluation are reviewed. The pinpointed robot technologies are the UAVs and crawling and underwater vehicles. Depending on the payload of the robot, different NDT techniques can be used to assess the different types of damage, including surface damages (e.g., cracks, corrosion, erosion) and hidden damages (e.g., delamination). In general, UAVs have the least payload but the highest efficiency and flexibility, whereas climbing and underwater robots have a higher payload and can support larger and heavier devices but are less flexible. On the side of data analysis, the use of intelligent algorithms reduces the dependence on human experts to perform labour-intensive tasks and improves the quality of inspection by standardizing analysis algorithms and procedures, with very high accuracies.
In [78], the design, test, and in-service operation of a hexapod robot, along with options for its deployment, is described (see Figure 7). The robot can deploy a wide range of measuring equipment and maintenance tools. The hexapod gait employed enables the chassis to be an end-effector, avoiding the use of traditional robot arms, and the multiple degrees of freedom associated with the robot legs enable the robot to walk on both convex and concave surfaces, as well as to straddle a leading-edge profile on a wind turbine aerofoil. It has been tested through multiple blade walks and tasks such as lightning protection system verification, inspections, and blade surface treatments.
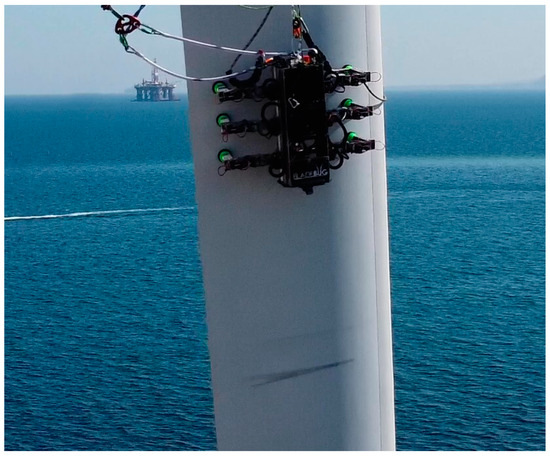
Figure 7.
On-blade deployment of a crawling inspection robot [78].
Figure 8 highlights the distribution of the research focus across different robotic tasks within the articles, showing that most of the studies are concentrated on robotic solutions for system monitoring and maintenance. Here, system monitoring and maintenance accounts for most of the published research papers, reaching about 56%, followed by system manufacturing and assembly, at 27%, and system security and surveillance, at 17%.
Table 3.
Categorization of the considered robotic tasks in wind farms across different applications and technological approaches.
Table 3.
Categorization of the considered robotic tasks in wind farms across different applications and technological approaches.
| Robotic Task | Onshore Wind Farms | Offshore Wind Farms | Autonomous Operation | Robotic Integration with Human Operators | Advanced Inspection Techniques | References |
|---|---|---|---|---|---|---|
| System Monitoring and Maintenance | X | X | X | X | X | [68,69,70,71,72,74,75,78] |
| System Manufacturing or Assembly | X | X | X | X | X | [69,72,76] |
| System Security and Surveillance | X | X | X | X | X | [68,77] |
| References | [69,72,75,76,77,78] | [68,69,74,75] | [68,70,72,74,76,77,78] | [68,72,74,76,77] | [70,71,72,77,78] |
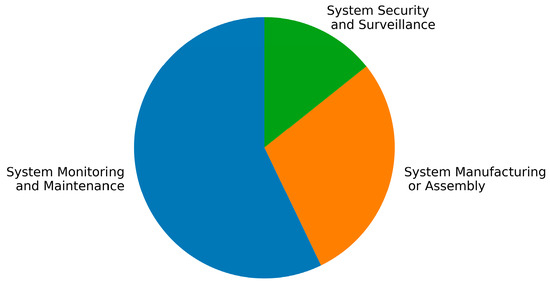
Figure 8.
Distribution of wind farm research focus across different robotic tasks.
3.4. Robotics for the Hydroelectric Generation
Dams play an important role today, contributing to the production of a significant portion of electricity from renewable sources. Additionally, they allow for the control of water flows, serve as water reservoirs, and contribute to the reduction in disasters.
In this paragraph, we will focus mainly on dams for hydroelectric power generation. The articles reviewed range mainly from 2016 to 2024, ensuring a comprehensive overview of the most recent developments in the field. The literature search was conducted using a set of carefully selected keywords, including “robot dam inspection”, “robot dam maintenance”, and “underwater dams concrete monitoring”, which were applied across various search fields, such as titles, abstracts, and keywords, to find relevant studies. To refine the selection, the inclusion criteria focused on peer-reviewed journal articles and conference papers that presented original research or significant reviews within this period. Studies were included if they provided empirical data, detailed methodologies, or in-depth analyses of the technologies under consideration. Exclusion criteria were used to omit non-peer-reviewed sources, studies not available in English, and those lacking sufficient methodological detail or empirical evidence.
Dams are generally made of concrete, and their structure can present problems over time, such as deformations, cracks, spalling, erosion, and wear. Besides the structure, other aspects to monitor include debris that can obstruct the water outlet channels, the penstocks, the turbines, and the general evolution of sediments. Once the damage is identified and maintenance is performed, monitoring is important. But, according to [79], the monitoring and evaluation of crack repair is an important task rarely reported.
The use of robotics in the operation and maintenance of hydroelectric dams enhances safety, efficiency, and data collection capabilities. Robotics technologies are pivotal in performing inspections and maintenance tasks that are otherwise dangerous or challenging for human operators. This type of plant requires the intervention of diverse types of robots depending on the component to be monitored. For underwater monitoring, underwater robots are needed, while for those above water, aerial drones or climbing robots are usually used.
The operations can be divided into those to be carried out above the water level and those below.
3.4.1. Above-Surface Monitoring
The analysis of structural integrity is of fundamental importance to prevent disasters and must be carried out regularly. Automating this process introduces advantages such as cost and risk reduction and the reliability of the results. An advantageous strategy is to use photogrammetry because of its reduced duration of field work, the capacity to record simultaneous three-dimensional coordinates, and, in principle, the ability to monitor an unlimited number of points [80].
Regarding operations above the water, plenty of work has been carried out on the use of drones and climbing robots for the analysis of the dam surface. In [81], a climbing robot is used to detect automatically, count defect instance numbers, and reconstruct the surface of dam spillways by incorporating the deep learning method with a visual 3D reconstruction method. The ORB-SLAM method is used to extract keyframes from the acquired colour and depth images and to obtain the pose transform matrices of all images. Then, a dense environment point cloud model is generated by bundle adjustment.
In [82], the methods and results from a robotic crawler-based ground-penetrating radar (GPR) inspection of rehabilitated concrete from a hydroelectric dam spillway are presented. Standard practise would have left these repairs uninspected or put people at risk when deploying them on the spillway for manual inspections. The paper shows that high-quality data can be recorded from repairs without the need for manual inspection. A remotely controlled robotic crawler system assures repair quality efficiently and effectively (see Figure 9).

Figure 9.
(a) Crawler with GPR being lowered onto spillway; (b) Crawler with GPR collecting data across repaired concrete surface; (c) Data collection with handheld device [82].
A different more holistic approach is described in [83], where an organized, scalable, and decentralized architecture is described, to support decision-making, such as interpretation and goal-oriented reasoning from the cooperation between high-level autonomous cognition systems and expert knowledge. The aim is the inspection of dams through a cognitive-based architecture that creates a high-level decision-making process through decentralized multi-objective reasoning. For instance, it may analyze the current 3D point cloud and, in order to enhance quality, change the originally planned path.
3.4.2. Below-Surface Level Monitoring
The presence of currents and poor visibility pose a danger for a human diver. Therefore, the use of robotic systems is a safer and cheaper alternative, avoiding the need to dewater the plant. Underwater robotic vehicles can pinpoint and measure the exact locations of cracks, spalling, erosion, voids, and wear, providing critical data for immediate and long-term maintenance planning. These robots are equipped with advanced imaging and sensor technologies that allow them to operate in zero-visibility conditions and turbulent waters, ensuring detailed and accurate inspections of dam structures and tunnels.
In [84], the use of remotely operated underwater vehicles (ROVs) to carry sensors for the conventional ultrasonic pulse velocity (UPV) technique is discussed for underwater applications. The paper shows that UPV can identify zones of inhomogeneity within the concrete structure and discusses the influence of water saturation, marine growth, and the inspection surface, presenting experimental studies both in the laboratory and in the field.
The development of a dam inspection robot is described in [85]. The robot employs visual data for the inspection of dams. The paper is focused on the solution of adhering to the concrete walls by a negative pressure effect plate due to thrusters, a solution that opposes the common approach with ROVs, which are prone to external disturbances on the stability of the robot and positioning performance and difficulties on the side of untrained operators.
A hybrid robot composed of a crawler robot and an ROV is proposed in [86] to perform reservoir visual inspection. The tracked crawler carries the ROV and inspects the bottom with a 3D sonar; the ROV performs visual inspection on the tank walls and above the water. The focus of the paper is on the control of the distance and orientation to the reservoir surfaces to recognize and register defects (mainly cracks).
Regarding visual techniques for the inspection of concrete in underwater environments, recent methods are heavily based on an artificial intelligence approach centred on neural networks [87,88]. Since the algorithms are usually trained by examples, the availability of datasets plays a crucial role [87]. Another important issue is represented by the fact that low light, due to depth and turbidity, and biofouling may make video processing difficult. In [89], several techniques for the detection of underwater cracks on concrete dam surfaces are reviewed.
In [90], a method is proposed that can overcome issues, such as uneven illumination, colour distortion, and detail blurring, and can effectively detect and localize cracks in underwater optical images with low illumination, a low signal-to-noise ratio, and low contrast. In [91], a method able to handle images which are full of uneven illumination, even when the crack is tiny and interfered with by other factors, is described.
In hydropower, typical situations that involve in situ maintenance include cavitation damage, fatigue-induced cracking, and corrosion. The SCOMPI robot [92] is a robot dedicated for in situ fixing. It is a six-axis manipulator which can deposit weld metal on complex shapes or reconstruct profiles through grinding. It is mainly applied to turbine repair.
In [93], a three-linear axis grinding robot and a test bench designed for the study of underwater grinding processes for the rectification of underwater hydroelectric steel structures are presented.
The review of recent works has shown an ever-increasing interest in the automated monitoring of the concrete structure of the dam. Refs. [84,86] have also integrated solutions for cleaning marine growth. Most of the works have used ROVs for underwater operations, while climbing robots are used both for above- and below-water operations. Drones are obviously used for external analysis, typically image acquisition.
The use of deep learning techniques for the analysis of captured images in order to classify and localize defects is of increasing interest both above [81,83,87] and below the water surface [88]. Transfer learning is a technique to reuse training in other contexts, given the difficulty of finding specific datasets [87].
For the analysis of the inside of the structure, only techniques such as GPR or UPV, for which it is required that the sensor has a stable contact with the structure, are used.
Table 4 categorizes tasks based on the sensors used and the type of monitoring performed. In particular, for the pinpointing of the defect, the localisation of the robot on the dam is of fundamental importance. Ref. [82] noted difficulties in using a GPS to accurately measure a vertical displacement so close to a concrete wall and suggests the use of a robotic total station.
Table 4.
Tasks based on the sensors used and on the type of monitoring performed.
The underwater environment has always been a challenging environment to operate in. The water, often turbid, makes video analysis difficult; the currents complicate the robot’s control actions, and radio communications with the ground station are not feasible. In fact, all the papers describe the use of remotely controlled ROVs with direct human intervention.
3.5. Robotics for Power Lines
The search for robotics applications in power line O&M was conducted simply using Google with no specific parameters. This approach aimed to discover not only academic papers but also content from electric companies, providing insight into the working environment for these robots, particularly the inspection and maintenance tasks currently performed by humans that could be taken over by robots.
In addition to understanding the work environment, as described in the following lines, another result from this first phase was the emergence of two main application branches: robots operating suspended from power lines and drones. For these, two separate bibliographic searches were conducted, resulting in two comprehensive reviews recently published (in December 2023 [94] and March 2024 [95], respectively). As new bibliographic searches since those dates have not yielded further results, the contents of these two reviews are detailed further below.
Power lines transport electrical energy from production centres to end users by utilizing wires of various types and sections, operating at different voltage levels depending on the amount of energy to be transported and the distance between production centres and users. To ensure stable operation and prevent downtime, damage, and malfunctions, periodic monitoring and maintenance programmes have to be implemented.
Power lines span long distances, often crossing thousands of kilometres through suburban areas and inaccessible regions such as mountains, deserts, bodies of water, forests, and other challenging environments. These environments are frequently subject to adverse climatic conditions that expose the power lines to demanding working conditions, such as thermal fluctuations, rain, ice, wind-induced vibrations, and extreme temperatures, all of which can induce significant losses, corrosion, and fatigue ruptures. Additionally, lightning strikes can cause severe damage, including strand ruptures and wire melting. Insulators may develop cracks due to environmental changes and electrical arcs, directly impacting the safety of transmission lines since they provide electrical isolation and mechanical support to the system. In coastal regions, salt accumulation on insulators can lead to a loss of dielectric strength and electrical current leakage between the lines and the ground. Conductors may experience thinning and punctures caused by leakage currents and corona discharge events [96,97].
Power lines frequently encounter aerodynamic instability caused by wind and rain. Like other oscillations, this type of vibration increases the fatigue of conductors, particularly at line supports or clamps. On rainy days, raindrops strike the power line, adhere to the high-voltage conductor, and, under adverse wind conditions, can lead to the collapse of the supporting towers [98,99,100].
To minimize maintenance costs and to prevent power outages, regular inspections are conducted to identify components requiring maintenance and to detect faults in transmission equipment. Inspection operations focus on components such as insulators, vibration dampers, conductors, spacers, and clamps [101,102]. Over time, two primary methods have been used for inspecting power transmission lines: the first method involves manual inspection by workers on the ground, using telescopes, on gondolas suspended from overhead ground wires, or even climbing the metal towers. This method has significant drawbacks, including high labour intensity, lengthy inspection cycles, high costs, and risks to personal safety. Additionally, ensuring inspection quality in challenging environments such as highlands, meadows, and forests is particularly difficult.
The second method involves using helicopters equipped with various cameras: a visual (daylight) camera, an infrared camera to detect hot spots (as damage to cables and insulators usually increases electrical resistance and local temperature), and an ultraviolet camera to detect corona discharge (defective components cause a local increase in the electrical field, leading to the ionization of air and the emission of UV radiation). Helicopters offer greater efficiency for inspections in high-altitude, cold, and non-dedicated landing areas. However, this method is costly, and the inspection quality decreases under adverse weather conditions [103,104]. Furthermore, some critical defects, such as the internal corrosion of steel-reinforced aluminium conductors, require precise inspection that should preferably be performed from close distances.
Cost, time efficiency, and human safety are critical during the inspection process. To replace human workers, power companies and scientific institutions have developed specialized robots. These robots, which move suspended from the wires, can perform inspection tasks at close distances from the power lines. Various reviews of these types of robots are available in the literature [104,105,106,107,108,109,110,111,112,113], but the most recent and comprehensive review of existing and developing robots for power line inspection is presented in [94]. This work details forty-nine robot designs, distinguishing between those that move on ground wires (ten designs) and those that move on live wires, further differentiating between those moving on single wires (thirty-three designs) and multiple wires (six designs).
Table 5 shows, for each type of movement, the number of robots considered in [94] that have reached a certain stage of development. At the first stage, the examinate papers illustrate only 3D CAD drawings; at the second, the functionality of the proposed robots has been validated trough computer simulations; at the third stage, the robots’ functionality has been tested in laboratory experiments (using real parts of power lines or a mock-up); and at the final stage, the robots have been tested on real power lines (de-energized in some cases).
Table 5.
Summary of different stages of development for the robot considered in [94].
Robots operating on power lines must overcome various obstacles encountered along their path. These obstacles include dampers, insulators, clamps (such as tension and suspension clamps), spacers, splicing sleeves, towers, aircraft warning lights, and other electrical equipment (see Figure 10).
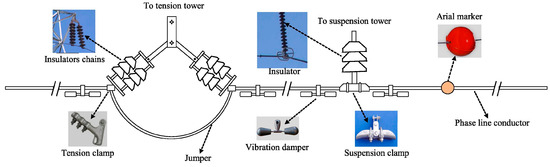
Figure 10.
A sketch of a typical power line system showing the obstacles that should be bypassed by any inspecting robot [105].
While some obstacles are small and relatively easy to overcome, others are larger and present significant challenges. As well as overcoming obstacles, the robots should be able to move quickly along the line, halt when it encounters an obstacle, and maintain stability throughout the obstacle-crossing process [105,114,115]. Various approaches to obstacle crossing have been documented, ranging from multi-arm structures to gibbon-inspired crawling structures. Some assistance comes from the fact that the positions of many of these obstacles are known in advance from the line construction plans.
Figure 11a shows Expliner, the robot proposed in [116] and field-tested. Its mobility is based on two pulley units placed on the cables of a bunch line and driven by the electric motors M1 and M2; each of the two pulley units is connected to a horizontal base by another two motors, M3 and M5, and a vertical base is rigidly connected to the horizontal one, with a 2-DOF manipulator connected to its lower end and actuated by the motors M4 and M6; on the tip of this manipulator, there is a counterweight with batteries and electronics.
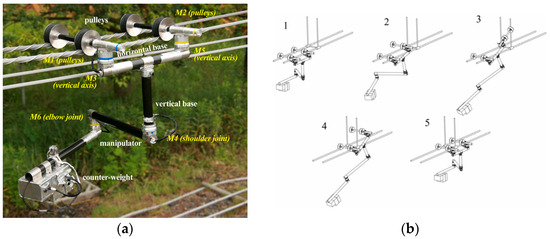
Figure 11.
(a) Concept of Expliner with main components; (b) Sequence of motions for overcoming clamp suspender (first half of motion) [116].
Therefore, through an automated sequence of coordinated movements, shown in Figure 11b, it is possible to change the position of the center of mass of the device to lift one of the two pulley units and to overcome large obstacles.
As inspection robots are attached to power lines, they add to the overall weight of the lines. One challenge in minimizing the robots’ weight is the size of the motors and the need for appropriate electromagnetic shielding for the motors and other electronic components to ensure they function correctly near the fields generated by live lines [117,118].
The inspection process can also be affected by wind, which may cause oscillations in transmission lines. This not only complicates obstacle avoidance but also blurs inspection imaging. Reference [99] introduces a robot designed to withstand oscillations and conduct inspections under windy conditions.
In 1991, Sawada et al. from Japan were among the first researchers to develop and design a practical mobile power line inspection robot [119]. This robot navigated a ground wire located above the live lines, maneuvering over obstructions created by subsidiary equipment. When the robot encountered a tower, it unfolded an arc-shaped arm that acted as a guide rail attached to the ground wire on the opposite side of the tower. It then travelled along the arm to pass around to the other side of the tower, and once firmly affixed to the wire on the other side, it detached the arm and folded it up until needed again.
Robots using ground wires were the first to be proposed, as ground wires are always located a few metres above the live lines to ensure lightning protection and are supported at the tops of the towers. Generally, the only obstacles to the robot’s travel are the signalling spheres, as ground wires have no insulators. Another advantage of travelling on ground wires is that they do not cause electromagnetic interference with the robot’s motors and cameras; thus, electromagnetic shielding is not necessary, reducing the robot’s weight.
Conversely, the detailed inspection of live lines requires powerful cameras and specialized control methods. Consequently, researchers began exploring the possibility of robots moving directly on live lines to gather more detailed data [120]. Since these robots pass over or very close to the components that need inspection, the cameras and sensors do not require high-quality sensing. To prevent the motors, cameras, or sensors on the robots from being affected by the magnetic field generated by the live lines, the outer surface of the robot must be designed as an electromagnetic shield.
The utilization of live lines has also prompted the development of new sensors for inspections. For instance, a new laser sensor introduced in study [121] directly measures the diameter of the cable on which the robot’s pulleys travel.
Although the robots that move along power lines have the considerable advantage of being able to inspect conductors and other components closely, their inspection processes are considered slow due to the time required to navigate obstacles and the time needed for their installation on the wires [95]. For the latter, special cranes mounted on mobile platforms are necessary, and for some robots, the installation can take about an hour.
For this reason, aerial inspections are often utilized by power companies and research institutions; the widespread commercial availability of drones and other unmanned aerial vehicles (UAVs) makes the development of new flying devices unnecessary, shifting the research focus to image processing instead. A very recent and comprehensive review of the use of unmanned aerial systems for power line inspection is presented in [95].
Hybrid robot designs [122,123] have been introduced to combine the advantages of an inspection process conducted by moving along power lines, with the flying capabilities used to position the platform on the line and bypass obstacles. The stability of landing on power lines, especially under windy conditions, necessitates a complex control strategy for these robots [124]. To compute their pose relative to the power lines, these robots use cameras and LIDAR together.
4. Machine Learning
Effective operations and maintenance (O&M) practises, including automated robotic approaches, are essential to manage energy production plants, to minimize downtime, and to optimize their performance [125].
Robotic systems, equipped with advanced machine learning (ML) and computer vision (CV) techniques, are currently deeply changing the way O&M tasks are implemented since, once integrated into the plant, they can autonomously navigate and inspect any kind of energy infrastructure, such as wind turbine blades, solar panel arrays, hydroelectric dams, and detecting faults with high accuracy and precision. The integration of efficient ML and CV allows these robotic systems to process vast amounts of data in real-time both in place (edge AI) or remotely exploiting the cloud infrastructure, identifying patterns and anomalies that may indicate potential issues [126,127]. Moreover, autonomous robotic systems can already carry aboard embedded high computing power systems for in-field AI-driven decision-making. A recent example is given in [128], where a drone is shown to autonomously locate faulty PV modules, deciding when to trigger O&M field teams.
Advanced deep learning (DL) vision-based techniques and UAV technologies present a multitude of opportunities for automating the following four primary tasks in power line inspection: mapping and inspecting power line components, detecting and measuring icing, monitoring vegetation encroachment, and disaster monitoring. For example, cutting-edge object detectors powered by deep convolutional neural networks (e.g., Faster R-CNN [129], SSD [130], YOLO [131], and R-FCN [132]) combined with deep neural networks for image classification, such as ResNet [133], Inception-v4, and Inception-ResNet [134], are capable of detecting, classifying, and mapping any power line component.
Moreover, deep learning-based semantic segmentation methods (e.g., DPN [135] and Mask R-CNN [136]), along with traditional background removal techniques like colour-based suppression [137] and pulse-coupled neural filters [138], can effectively eliminate backgrounds from detected components. Subsequently, inspections on the segmented images can be performed using techniques such as texture analysis and vision-based anomaly detection to identify faults. These methods are also advantageous for disaster monitoring. For instance, a tree detection model can be integrated with a power line detection model to identify trees fallen across or against power lines following natural disasters like storms, hurricanes, and earthquakes.
In the field of wind and solar renewable energies, drones and ground robots equipped with high-resolution cameras and infrared sensors can capture detailed images and thermal data from PV panels, CSP collectors, and wind turbine blades [39]. Using CV algorithms, these robots can analyze the images to detect cracks, corrosion, soling/dirt, and thermal anomalies that are indicative of faults. ML models can then classify these anomalies and predict the likelihood of component failures, enabling proactive maintenance and reducing both OPEX and the risk of unexpected downtime [32,139].
In hydroelectric production infrastructures, ML algorithms have been successfully used for the identification of cracks and spallation in dams. Modern deep learning architectures like YOLO and Faster R-NN have made automatic inspection easier to implement [91] and have substantially improved performance using a limited number of training samples which are particularly difficult to acquire in this specific field [140,141].
Taking advantage of that, robotic systems can now be trained to perform complex tasks that would be challenging or dangerous for human workers. For example, they can conduct inspections in hard-to-reach areas, such as the tops of wind turbine towers or the submerged sections of hydroelectric dams. By automating these tasks, robots not only enhance the safety and efficiency of O&M operations, but also ensure more consistent and reliable fault detection [142,143].
Knowledge extraction relies on a number of machine learning tools, as listed below, that have to be carefully tuned onto the specific energy plant:
Image segmentation: to extract the relevant parts to be monitored, e.g., solar panels in aerial drone imagery, blades and turbine components, dam structural components and water pathways to monitor integrity and leaks, power line components and surrounding vegetation.
Object detection: to identify defects such as cracks hotspots and dirt or foreign objects affecting solar panel performance, detect blade damage, corrosion, or misalignment, identify components and detect faults such as broken insulators or damaged conductors or encroaching vegetation, and identify any dam structural damage (crack, spalling, etc.).
Simultaneous Localisation and Mapping (SLAM): to create detailed maps of solar or wind power plants for precise inspection and maintenance and to map internal structures for maintenance and inspection in hydroelectric plants.
Signal processing for anomaly detection: to analyze thermal and electrical signals to detect anomalies and predict failures in solar panels or power lines and to process vibration and acoustic signals to identify potential equipment failures in wind turbines.
Environmental monitoring: to monitor shading on solar panels from nearby objects or vegetation, track environmental conditions that may affect turbine performance, monitor surrounding areas for vegetation growth and potential fire hazards to power lines, as well as monitoring their impacts in terms of gas pollutants (e.g., ozone) and particulate emissions [144].
Predictive maintenance: to use historical operational data by online anomaly detection systems to forecast infrastructure maintenance requirements.
3D reconstruction: to generate 3D models for comprehensive monitoring and maintenance planning.
4.1. Localization, Segmentation, and Detection
Image localization refers to the task of identifying the specific location of objects within an image. This is a critical step in more complex tasks such as object detection and image segmentation. Key models and techniques for image localization include region-based CNNs (R-CNNs), You Only Look Once (YOLO), and Single Shot MultiBox Detector (SSD). The R-CNN family [145], including Fast R-CNN and Faster R-CNN, represents a significant leap in object detection and localization. These models first generate region proposals and then classify each region to detect objects. Faster R-CNN integrates region proposal generation into the network, significantly speeding up the process and improving accuracy. YOLO is known for its speed and real-time object detection capabilities. Unlike R-CNNs, which process region proposals separately, YOLO frames object detection as a single regression problem, predicting both the bounding boxes and class probabilities directly from full images in one evaluation. This results in much faster detection speeds, making YOLO suitable for real-time applications [131]. SSD also aims at real-time object detection, but takes a different approach by combining predictions from multiple feature maps of different resolutions. This allows SSD to handle objects of various sizes more effectively and efficiently compared to other models.
4.2. Classification
Image classification involves assigning a label to an image based on its content. This task forms the backbone of many CV applications and has been revolutionized by the advent of deep learning. The key models used for image classification include convolutional neural networks (CNNs), vision transformers (ViTs), and, more recently, hybrid models. CNNs: CNNs have been the cornerstone of image classification for nearly a decade. They are designed to automatically and adaptively learn spatial hierarchies of features from input images. Architectures such as AlexNet, VGGNet, Inception, and ResNet have set benchmarks for image classification tasks. ResNet introduced the concept of residual learning, enabling the training of very deep networks by addressing the vanishing gradient problem. ViTs [146]: Inspired by the success of transformers in natural language processing, vision transformers have recently emerged as a powerful tool for image classification. ViTs treat an image as a sequence of patches and employ self-attention mechanisms to model long-range dependencies. This approach has shown promising results, particularly in scenarios where large-scale pre-training data are available. Hybrid models: Combining the strengths of CNNs and ViTs, hybrid models aim to leverage the local feature extraction capabilities of CNNs with the global context understanding of transformers. These models often outperform their pure counterparts in various benchmarks, offering a balanced trade-off between computational efficiency and accuracy.
4.3. Three-Dimensional Reconstruction
Three-dimensional reconstruction involves creating three-dimensional models from two-dimensional images. This task is essential in applications such as virtual reality, medical imaging, and autonomous navigation. Techniques and models for 3D reconstruction include structure from motion (SfM), multi-view stereo (MVS), and deep learning-based approaches. SfM [147]: SfM is a photogrammetric technique that estimates 3D structures from 2D image sequences. By analyzing the motion of feature points across multiple images, SfM constructs a sparse 3D point cloud of the scene. MVS [148]: MVS takes the sparse point clouds generated by SfM and densifies them, producing detailed 3D models. It uses multiple images from different viewpoints to infer depth information and reconstruct the scene with higher precision. Deep learning-based approaches: Recent advances in deep learning have introduced novel methods for 3D reconstruction, such as volumetric CNNs and differentiable rendering. These models can learn to generate 3D shapes directly from images, leveraging large datasets and powerful computational resources to produce high-fidelity reconstructions.
5. Datasets
The development and training of computer vision models for tasks such as image classification, localization, 3D reconstruction, and predictive maintenance require extensive and diverse datasets for training CV models. Several public datasets have been realized to support research and advancements in these areas. For image classification, popular datasets include ImageNet [149], with millions of labelled images across thousands of categories, and CIFAR-10/100 [150], which provides smaller, more manageable datasets for quick experimentation. For object detection and localization, the COCO (Common Objects in Context) [151] dataset offers a vast array of annotated images with object segmentations and labels, while Pascal VOC [152] provides a comprehensive collection of images with annotated objects for benchmarking detection algorithms. In the realm of 3D reconstruction, datasets such as Middlebury [153] and DTU [154] provide multi-view stereo images and ground truth 3D models, facilitating the evaluation of reconstruction algorithms. Additionally, there are predictive maintenance benefits from datasets like NASA’s Turbofan Engine Degradation Simulation Data [155], which includes time-series data and failure records from simulated engines, and the MIMII dataset [156], which contains audio and image data from industrial machines under normal and anomalous conditions. These datasets collectively support the continuous improvement and validation of computer vision models across various applications.
Hong et al. [81] created a multi-class semantic segmentation dataset of 1711 images (with resolutions of 848 × 480 and 1280 × 720 pixels) acquired by a wall climbing robot, including cracks, erosion, spots, patched areas, and power safety cable relative to a concrete surface of a dam.
The specific training or fine tuning of pre-trained models for the specific context of the fault detection of renewable energy plants requires vertical datasets on the domain of interest. Below is a list of available public datasets:
The CPLID dataset is the Chinese Power Line Insulator Dataset [157]. (https://github.com/InsulatorData/InsulatorDataSet (accessed on 10 September 2024)) It consists of aerial images, providing 600 images representing normal insulators and of 248 synthetic images of defective insulator (e.g., missing cap). In all the images, insulators are labelled.
Tomaszewski et al. [158] provided the Insulator dataset to the public (https://github.com/heitorcfelix/public-insulator-datasets/tree/master, accessed on 10 September 2024). It includes outdoor images taken from the ground, providing 2630 images representing a long rod electrical insulator under varying lighting conditions and against different backgrounds. In all the images, insulators are labelled.
Bian et al. [159] provided the Tower dataset in their research paper (https://drive.google.com/drive/folders/1UyP0fBNUqFeoW5nmPVGzyFG5IQZcqlc5, accessed on 10 September 2024). It consists of images collected from inspection videos and the internet, offering 1300 images representing towers in different backgrounds. In all the images, towers are labelled.
Yetgin et al. [160] made the Conductor dataset publicly available in their research paper with the cooperation of the Turkish Electricity Transmission Company (TEIAS) (https://data.mendeley.com/datasets/n6wrv4ry6v/8, accessed on 10 September 2024) and https://data.mendeley.com/datasets/twxp8xccsw/9, accessed on 10 September 2024). It contains images collected from inspection videos using infrared and visible cameras, providing 4400 images representing power lines and 4400 images without power lines. In each category, infrared images and visible ones are equal in number. To achieve multiscale recognition, images were acquired at different distances from the target. Also, to allow weakly supervised learning, the dataset is separated in two subsets according to different annotations. Subset 1, made of 8000 images, is labelled with image-level annotations, while the remaining images are labelled with pixel-level annotations.
The Duke California Solar Array Dataset [161] is composed of over 400 km2 of imagery and 16,000 hand-labelled solar arrays.
The Desert Knowledge Australia Center Dataset [162] contains multiple real-life data of PV technologies ranging many types, ages, models, and configurations.
The ESOLMET-IER Dataset [163] is made available by The Institute of Renewable Energies UNAM and contains solar metric and meteorological data taken from the station “ESOLMET-IER”.
The National Solar Radiation Data Base (NSRDB) [164] is a publicly available dataset that consists of solar radiation and meteorological data from the US and surrounding countries over the last 23 years.
Finally, the Photovoltaic Thermal Images Dataset [165,166] is composed of aerial thermal images of PV arrays with the presence of one or more anomaly cells.
6. Discussion
Deterioration and faults in renewable energy plants can arise from mechanical failures, electrical issues, environmental factors, and human errors. Some common faults for wind turbines include blade damage or erosion, gearbox failures, generator malfunctions, and yaw system errors. Concerning the photovoltaic plants, faults may include panel degradation or cracking, inverter failures, hotspots and shading issues, and connection and wiring faults, including line-to-line and line-to-ground issues. Concentrated solar plants are mainly affected by several issues at the collector level, including, for example, soiling. In hydroelectric plants, common faults include turbine wear and tear, generator problems, dam and spillway structural issues, and control system errors. Finally, for the power lines, problems may arise from vegetation growth and associated fire hazards, broken insulators, damaged conductors, and missing components. This work has focused on reviewing the papers focused on the investigation, development, and field testing of robotic systems for the inspection and maintenance of such power plants. It has been observed that the number of robotic solutions reported in the scientific literature is proportional to the pervasiveness of the specific type of renewable energy. The largest number of applications is therefore found in the photovoltaic sector, with numerous systems for cleaning panels in different weather and environmental conditions. The applications to CSP or hydroelectric plants is much more limited. Another evident aspect is that of the ubiquity of the use of unmanned aerial vehicles in photovoltaic plants, CSPs, wind farms, and power lines. The flying systems can carry only lightweight sensors, but since most of the inspection is performed by cameras, either visual or infrared, this does not appear to be a major limitation.
Another important aspect is the development of several hybrid solutions in which the capabilities of different robots are coordinated to tackle the O&M of plants from different points of view at the same time. As an example, flying drones and crawling robots used to inspect wind turbines or even flying drones to deploy and retrieve crawling robots on the blades of a wind generator are increasingly investigated. Automated inspections with drone-based CV systems can detect panel defects, dust accumulation, and shading problems in the case of solar power plants. ML algorithms can now predict turbine failures by analyzing sensor data, while CV can also identify blade damage or misalignment through aerial imagery in the case of wind power. But CV systems can also monitor structural integrity and detect blockages or leaks in real time for the hydropower plants. Finally, monitoring power lines with CV and ML can enhance the detection of faults, icing, and vegetation encroachment, as well as improve disaster response by identifying and assessing damage from natural events.
Besides more traditional NDT such as laser metrology, eddy current measurement, and shearography, the use of visual or infrared information is of paramount importance. This information is processed through machine learning and computer vision techniques typically based on AI and deep learning approaches. Several vision-based methods for anomaly detection have been reviewed and many different training datasets have been presented. Moreover, it is worth noting that some solutions can be found on the market in terms of services for power plants, especially in the field of panel cleaning, but, at the same time, the solutions proposed seem to still be in a very early stage.
Finally, two limitations that characterize this work need to be underlined. First, the contribution of machine learning techniques may be considered, in general, an integral part of the technological transformation, enhancing the capabilities of O&M processes and reducing human intervention by automating selected processes that are integrated with robotic operations. However, the literature investigated in this article has shown that the role of robotics in the operation and maintenance of renewable energy technologies remains somewhat fragmented. While there has been a notable proliferation of such techniques in the inspection sectors of photovoltaic power, wind power, and power lines, their application in other renewable energy sectors, such as management or actuation, remains relatively limited, an issue that will deserve more careful attention from the scientific community.
A second relevant gap in the examined scientific literature and, therefore, a significant cultural deficiency highlighted by this work is the absence of specific technical analyses relating the economic impact of the use of robotics on the renewable energy sector. As a matter of fact, a positive correlation between the increasing use of robotic systems and the increase in the incidence of the unemployment rate has been already highlighted [167]. This general trend should also be reflected in the energy sector, which actually employs around 3% of the total worldwide workforce [168]. On the other hand, the use of robotic systems is expected to increase the standardization level of production processes, leading, in turn, to a decrease in energy production costs, with effects that should overall be positive on worldwide economic growth. Unfortunately, this type of study is currently completely neglected in scientific research.
7. Conclusions
In the renewable energy sector, the use of autonomous machines to carry out the plants operation and maintenance tasks must no longer be considered only as one of the possible feasible operational options. Indeed, it must now be considered an unavoidable choice if the energy transition process, which is designed to drastically reduce the use of fossil fuels by 2050, has to avoid being slowed down or even being interrupted. The underlying reason lies in the fact that as renewable energies spread, their OPEX and CAPEX costs decrease significantly, and since there is not a fuel cost to take into account, they tend to be mainly limited by “labour-intensive” components. The way to get around this bottleneck is therefore the use of robots that must replace humans both in the installation phase of the systems and, even more so, in the operation and maintenance phase. For example, just to clarify these ideas, in the case of photovoltaic or wind energy, the labour-intensive components now account, respectively, for over 60% and over 40% of the maintenance yearly cost. The range of robots that can be used for these monitoring functions, as this review has shown, is already wide; these include drones, ground robots, and aquatic robots which, however, must be specialized for the particular energy domain in which they are required to operate. The human–machine connection is therefore still central to this area of research and development, especially in relation to areas such as that of renewable energy, characterized by a high granularity of systems with power densities generally 10–1000 times lower than those using fossil fuels and in which local environmental conditions make each system particular and different from any other. A joint and rapid effort is therefore desirable to meet the demands of the industrial sector, which will become increasingly pressing, driven by an increasingly highly competitive energy market.
Author Contributions
Conceptualization, G.D.F.; methodology, S.T., S.C., S.D.V., M.P., G.P. and A.Z.; investigation, S.T., S.C., S.D.V., M.P., G.P. and A.Z.; writing—original draft preparation, S.T., S.C., S.D.V., M.P., G.P. and A.Z.; writing—review and editing, S.T., M.P., G.D.F., A.Z. and S.C.; funding acquisition, G.D.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in the text:
| CAPEX | Capital expenditure |
| CNN | Convolutional neural network |
| CSP | Concentrated solar power |
| CV | Computer vision |
| DL | Deep learning |
| GPR | Ground-penetrating radar |
| LIDAR | Light detection and ranging |
| MAV | Micro aerial vehicle |
| ML | Machine learning |
| MVS | Multi-view stereo |
| NDT | Non-destructive testing |
| O&M | Operations and maintenance |
| OPEX | Operative expense |
| PV | Photovoltaic |
| R-CNN | Region-based CNN |
| REN | Renewable energies |
| ROV | Remotely operated vehicle |
| SfM | Structure from motion |
| SPCR | Solar panel cleaning robot |
| SSD | Single shot detector |
| UAV | Unmanned aerial vehicle |
| UPV | Ultrasonic pulse velocity |
| ViT | Vision transformers |
References
- Electricity Production by Source, World. Available online: https://ourworldindata.org/grapher/electricity-prod-source-stacked (accessed on 28 June 2024).
- Electricity Grids and Secure Energy Transitions—Analysis—IEA. Available online: https://www.iea.org/reports/electricity-grids-and-secure-energy-transitions (accessed on 28 June 2024).
- Wang, J.; Chen, L.; Tan, Z.; Du, E.; Liu, N.; Ma, J.; Sun, M.; Li, C.; Song, J.; Lu, X.; et al. Inherent Spatiotemporal Uncertainty of Renewable Power in China. Nat. Commun. 2023, 14, 5379. [Google Scholar] [CrossRef] [PubMed]
- Payne, H.J.; Hemming, S.; Van Rens, B.A.P.; Van Henten, E.J.; Van Mourik, S. Quantifying the Role of Weather Forecast Error on the Uncertainty of Greenhouse Energy Prediction and Power Market Trading. Biosyst. Eng. 2022, 224, 1–15. [Google Scholar] [CrossRef]
- Sayed, A.; El-Shimy, M.; El-Metwally, M.; Elshahed, M. Reliability, Availability and Maintainability Analysis for Grid-Connected Solar Photovoltaic Systems. Energies 2019, 12, 1213. [Google Scholar] [CrossRef]
- Zheng, Y.; Wei, J.; Zhu, K.; Dong, B. Reliability Analysis Assessment of the Wind Turbines System under Multi-Dimensions. Adv. Compos. Lett. 2020, 29, 2633366X2096633. [Google Scholar] [CrossRef]
- Limpens, G.; Jeanmart, H. Electricity Storage Needs for the Energy Transition: An EROI Based Analysis Illustrated by the Case of Belgium. Energy 2018, 152, 960–973. [Google Scholar] [CrossRef]
- European Commission; Directorate-General for Energy; Badouard, T.; Moreira de Oliveira, D.; Yearwood, J.; Torres, P.; Altman, M. Cost of Energy (LCOE)—Energy Costs, Taxes and the Impact of Government Interventions on Investments—Final Report; Publications Office: Luxemburg, 2020. [Google Scholar]
- Ramasamy, V.; Zuboy, J.; Woodhouse, M.; O’Shaughnessy, E.; Feldman, D.; Desai, J.; Walker, A.; Margolis, R.; Basore, P. U.S. Solar Photovoltaic System and Energy Storage Cost Benchmarks, with Minimum Sustainable Price Analysis: Q1 2023; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2023. [Google Scholar]
- Solar Construction Automation Solutions|Terabase Energy. Available online: https://www.terabase.energy/products-services/construction (accessed on 28 June 2024).
- Now Publishers—Chapter 1. Introduction to Inspection and Maintenance with Robotics. Available online: https://nowpublishers.com/article/Chapter/9781638282822?cId=978-1-63828-283-9.ch1 (accessed on 28 June 2024).
- Skog, D.A.; Wimelius, H.; Sandberg, J. Digital Disruption. Bus. Inf. Syst. Eng. 2018, 60, 431–437. [Google Scholar] [CrossRef]
- The Disruptive Potential of Energy Digitalization: A Comparative Analysis of German and French Policy-Mixes|LUP Student Papers. Available online: https://lup.lub.lu.se/student-papers/search/publication/9102203 (accessed on 28 June 2024).
- World Energy Outlook 2022—Analysis—IEA. Available online: https://www.iea.org/reports/world-energy-outlook-2022 (accessed on 28 June 2024).
- Weather Forecasts Have Become Much More Accurate; We Now Need to Make Them Available to Everyone—Our World in Data. Available online: https://ourworldindata.org/weather-forecasts (accessed on 28 June 2024).
- AI: Weather Forecasting. Available online: https://www.research.hsbc.com/C/1/1/320/9xhMRr6 (accessed on 28 June 2024).
- Knaut, A.; Obermueller, F. How to Sell Renewable Electricity—Interactions of the Intraday and Day-Ahead Market Under Uncertainty; EWI Working Papers 2016-4; Energiewirtschaftliches Institut an der Universitaet zu Koeln (EWI): Cologne, Germany, 2016. [Google Scholar]
- Das, S.; Swapnarekha, H.; Vimal, S. Integration of Blockchain Technology with Renewable Energy for Sustainable Development: Issues, Challenges and Future Direction. In Computational Intelligence in Pattern Recognition; Das, A.K., Nayak, J., Naik, B., Vimal, S., Pelusi, D., Eds.; Springer Nature Singapore: Singapore, 2023; pp. 595–607. [Google Scholar]
- Khare, V.; Bhatia, M. Renewable Energy Trading: Assessment by Blockchain. Clean. Energy Syst. 2024, 8, 100119. [Google Scholar] [CrossRef]
- Parmiggiani, E.; Mikalef, P. The Case of Norway and Digital Transformation over the Years. In Digital Transformation in Norwegian Enterprises; Mikalef, P., Parmiggiani, E., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 11–18. ISBN 978-3-031-05276-7. [Google Scholar] [CrossRef]
- Hajjaj, C.; El Ydrissi, M.; Azouzoute, A.; Oufadel, A.; El Alani, O.; Boujoudar, M.; Abraim, M.; Ghennioui, A. Comparing Photovoltaic Power Prediction: Ground-Based Measurements vs. Satellite Data Using an ANN Model. IEEE J. Photovolt. 2023, 13, 998–1006. [Google Scholar] [CrossRef]
- Benti, N.E.; Chaka, M.D.; Semie, A.G. Forecasting Renewable Energy Generation with Machine Learning and Deep Learning: Current Advances and Future Prospects. Sustainability 2023, 15, 7087. [Google Scholar] [CrossRef]
- Gong, L.; Chen, Y. Machine Learning-Enhanced loT and Wireless Sensor Networks for Predictive Analysis and Maintenance in Wind Turbine Systems. Int. J. Intell. Netw. 2024, 5, 133–144. [Google Scholar] [CrossRef]
- Del Rio, A.M.; Ramirez, I.S.; Marquez, F.P.G. Photovoltaic Solar Power Plant Maintenance Management Based on IoT and Machine Learning. In Proceedings of the IEEE 2021 International Conference on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT), Zallaq, Bahrain, 29 September 2021; pp. 423–428. [Google Scholar]
- Ferlito, S.; Ippolito, S.; Santagata, C.; Schiattarella, P.; Di Francia, G. A Study on an IoT-Based SCADA System for Photovoltaic Utility Plants. Electronics 2024, 13, 2065. [Google Scholar] [CrossRef]
- Steffen, B.; Beuse, M.; Tautorat, P.; Schmidt, T.S. Experience Curves for Operations and Maintenance Costs of Renewable Energy Technologies. Joule 2020, 4, 359–375. [Google Scholar] [CrossRef]
- Xing, L.; Sizov, G.; Gundersen, O.E. Digital Transformation in Renewable Energy: Use Cases and Experiences from a Nordic Power Producer. In Digital Transformation in Norwegian Enterprises; Mikalef, P., Parmiggiani, E., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 63–89. ISBN 978-3-031-05276-7. [Google Scholar] [CrossRef]
- Rekeraho, A.; Cotfas, D.T.; Cotfas, P.A.; Bălan, T.C.; Tuyishime, E.; Acheampong, R. Cybersecurity Challenges in IoT-Based Smart Renewable Energy. Int. J. Inf. Secur. 2024, 23, 101–117. [Google Scholar] [CrossRef]
- Rodat, S.; Thonig, R. Status of Concentrated Solar Power Plants Installed Worldwide: Past and Present Data. Clean. Technol. 2024, 6, 365–378. [Google Scholar] [CrossRef]
- Hardt, M.; Martínez, D.; González, A.; Garrido, C.; Aladren, S.; Villa, J.R.; Saenz, J. Hector—Heliostat Cleaning Team-Oriented Robot. In Proceedings of the Solar-PACES 2011 Conference, Granada, Spain, 20–23 September 2011. [Google Scholar]
- Felsch, T.; Strauss, G.; Perez, C.; Rego, J.; Maurtua, I.; Susperregi, L.; Rodríguez, J. Robotized Inspection of Vertical Structures of a Solar Power Plant Using NDT Techniques. Robotics 2015, 4, 103–119. [Google Scholar] [CrossRef]
- Bouaddi, S.; Fernández-García, A.; Sansom, C.; Sarasua, J.A.; Wolfertstetter, F.; Bouzekri, H.; Sutter, F.; Azpitarte, I. A Review of Conventional and Innovative- Sustainable Methods for Cleaning Reflectors in Concentrating Solar Power Plants. Sustainability 2018, 10, 3937. [Google Scholar] [CrossRef]
- Vicente Peña, C.J.; Massabe Muñoz, F.; Villa Navarro, J.R.; Garrido Ortiz, S. Cleaning System for Cleaning Parabolic Trough Collector Plants and Cleaning Method Using Said System. Patent WO 2012/126559 A2, 27 September 2012. [Google Scholar]
- PARIS “Buffs up” Solar Fields. Available online: https://www.renewableenergymagazine.com/solar_thermal_electric/paris-buffs-up-solar-fields (accessed on 21 June 2024).
- Pardell, R. Agcfds: Automated Glass Cleaning Flying Drone System. U.S. Patent Appl. 15/301,516, 27 July 2017. [Google Scholar]
- Azouzoute, A.; Zitouni, H.; El Ydrissi, M.; Hajjaj, C.; Garoum, M.; Bennouna, E.G.; Ghennioui, A. Developing a Cleaning Strategy for Hybrid Solar Plants PV/CSP: Case Study for Semi-Arid Climate. Energy 2021, 228, 120565. [Google Scholar] [CrossRef]
- Cleaning Robot Soltibot® Successfully Tested on Linear Fresnel Collectors. Available online: https://cordis.europa.eu/article/id/124143-cleaning-robot-soltibot-successfully-tested-on-linear-fresnel-collectors (accessed on 21 June 2024).
- Milidonis, K.; Eliades, A.; Grigoriev, V.; Blanco, M.J. Unmanned Aerial Vehicles (UAVs) in the Planning, Operation and Maintenance of Concentrating Solar Thermal Systems: A Review. Sol. Energy 2023, 254, 182–194. [Google Scholar] [CrossRef]
- Tian, M.; Desai, N.; Bai, J.; Brost, R.; Small, D.; Novick, D.; Yellowhair, J.; Rafique, M.Z.E.; Pisharam, V.; Yao, Y. Toward Autonomous Field Inspection of CSP Collectors with a Polarimetric Imaging Drone. In Proceedings of the SolarPACES Conference Proceedings, Sydney, Australia, 10–13 October 2023; Volume 1. [Google Scholar] [CrossRef]
- Coventry, J.; Asselineau, C.-A.; Salahat, E.; Raman, M.A.; Mahony, R. A Robotic Vision System for Inspection of Soiling at CSP Plants. In Proceedings of the SOLARPACES 2011, Daegu, Republic of Korea, 1–4 October 2019; p. 100001. [Google Scholar]
- EU—Inship Project DEliverable 3.4 Survey of Existing Automated Mirror Cleaning Technologies 2017. Ref. Ares(2016)6703785—30/11/2016. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5b6442653&appId=PPGMS (accessed on 10 September 2024).
- SUNCNIM|Suncnim. Available online: https://www.suncnim.com/en (accessed on 21 June 2024).
- Home—DURABLE. Available online: https://www.durableproject.eu/ (accessed on 21 June 2024).
- Solar Thermal Technology|Heliogen. Available online: https://www.heliogen.com/Technology/#autonomy-and-Robotics (accessed on 21 June 2024).
- Heliogen Demonstrates AI-Powered Autonomous Robot, ICARUS. Available online: https://www.heliogen.com/press-releases/heliogen-demonstrates-ai-powered-autonomous-robot-icarus-designed-to-lower-installation-and-maintenance-costs-of-full-scale-concentrated-solar-plants/ (accessed on 21 June 2024).
- Mitchell, R.A.; Zhu, G. A Non-Intrusive Optical (NIO) Approach to Characterize Heliostats in Utility-Scale Power Tower Plants: Methodology and in-Situ Validation. Solar Energy 2020, 209, 431–445. [Google Scholar] [CrossRef]
- Amin, A.; Wang, X.; Alroichdi, A.; Ibrahim, A. Designing and Manufacturing a Robot for Dry-Cleaning PV Solar Panels. Int. J. Energy Res. 2023, 2023, 7231554. [Google Scholar] [CrossRef]
- Megantoro, P.; Abror, A.; Syahbani, M.A.; Anugrah, A.W.; Perkasa, S.D.; Setiadi, H.; Awalin, L.J.; Vigneshwaran, P. Autonomous and Smart Cleaning Mobile Robot System to Improve the Maintenance Efficiency of Solar Photovoltaic Array. Bull. EEI 2023, 12, 3288–3297. [Google Scholar] [CrossRef]
- Antonelli, M.G.; Beomonte Zobel, P.; De Marcellis, A.; Palange, E. Autonomous Robot for Cleaning Photovoltaic Panels in Desert Zones. Mechatronics 2020, 68, 102372. [Google Scholar] [CrossRef]
- Cai, S.; Bao, G.; Ma, X.; Wu, W.; Bian, G.-B.; Rodrigues, J.J.P.C.; De Albuquerque, V.H.C. Parameters Optimization of the Dust Absorbing Structure for Photovoltaic Panel Cleaning Robot Based on Orthogonal Experiment Method. J. Clean. Prod. 2019, 217, 724–731. [Google Scholar] [CrossRef]
- Parrott, B.; Carrasco Zanini, P.; Shehri, A.; Kotsovos, K.; Gereige, I. Automated, Robotic Dry-Cleaning of Solar Panels in Thuwal, Saudi Arabia Using a Silicone Rubber Brush. Sol. Energy 2018, 171, 526–533. [Google Scholar] [CrossRef]
- Fan, S.; Liang, W.; Wang, G.; Zhang, Y.; Cao, S. A Novel Water-Free Cleaning Robot for Dust Removal from Distributed Photovoltaic (PV) in Water-Scarce Areas. Sol. Energy 2022, 241, 553–563. [Google Scholar] [CrossRef]
- Muhammed, S.; Laheb, T.; Ma’ad, H.; Maaroof, O.W. “UTU” Compact Solar Panel Cleaning Robot. Int. J. Adv. Nat. Sci. Eng. Res. 2023, 7, 217–226. [Google Scholar]
- Ölmez, B.B.; Ergezer, Ö.; Güğül, G.N. Autonomous Solar Panel Cleaning Robot with Rubber Wheeled and Air-Absorbing Motor. Int. J. Energy Appl. Technol. 2021, 8, 182–187. [Google Scholar] [CrossRef]
- Velasco-Sánchez, E.; Recalde, L.F.; Guevara, B.S.; Varela-Aldás, J.; Candelas, F.A.; Puente, S.T.; Gandolfo, D.C. Visual Servoing NMPC Applied to UAVs for Photovoltaic Array Inspection. IEEE Robot. Autom. Lett. 2024, 9, 2766–2773. [Google Scholar] [CrossRef]
- Rodriguez-Vazquez, J.; Prieto-Centeno, I.; Fernandez-Cortizas, M.; Perez-Saura, D.; Molina, M.; Campoy, P. Real-Time Object Detection for Autonomous Solar Farm Inspection via UAVs. Sensors 2024, 24, 777. [Google Scholar] [CrossRef]
- Jeffrey Kuo, C.-F.; Chen, S.-H.; Huang, C.-Y. Automatic Detection, Classification and Localization of Defects in Large Photovoltaic Plants Using Unmanned Aerial Vehicles (UAV) Based Infrared (IR) and RGB Imaging. Energy Convers. Manag. 2023, 276, 116495. [Google Scholar] [CrossRef]
- Al-Gawda, M.G.; Lau, C.Y.; Lai, N.S. Autonomous Uav Inspection System For Preventive Maintenance Of Solar Farms. J. Eng. Sci. Technol. 2022, 132–156. [Google Scholar]
- Nabti, M.; Bybi, A.; Chater, E.A.; Garoum, M. Machine Learning for Predictive Maintenance of Photovoltaic Panels: Cleaning Process Application. E3S Web Conf. 2022, 336, 00021. [Google Scholar] [CrossRef]
- Tsenis, T.; Tromaras, A.; Kappatos, V. NDE Using Quadruped Robotic Platform for Renewable Energy Producing Infrastructures. In Proceedings of the 2024 IEEE 8th Energy Conference ENERGYCON, Doha, Qatar, 4 March 2024; pp. 1–6. [Google Scholar]
- Le, N.T.; Nguyen, M.D.; Phan, T.D.; Truong, C.T.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Development of a Multi-Suspension Unit for Solar Cleaning Robots to Mitigate Vibration Impact on Photovoltaic Panels. Appl. Sci. 2023, 13, 12104. [Google Scholar] [CrossRef]
- Chailoet, K.; Pengwang, E. Assembly of Modular Robot for Cleaning Various Length of Solar Panels. IOP Conf. Ser. Mater. Sci. Eng. 2019, 639, 012014. [Google Scholar] [CrossRef]
- Akyazı, Ö.; Şahin, E.; Özsoy, T.; Algül, M. A Solar Panel Cleaning Robot Design and Application. Eur. J. Sci. Technol. 2019, 343–348. [Google Scholar] [CrossRef]
- Aravind, G.; Vasan, G.; Kumar, T.S.B.G.; Balaji, R.N.; Ilango, G.S. A Control Strategy for an Autonomous Robotic Vacuum Cleaner for Solar Panels. In Proceedings of the IEEE 2014 Texas Instruments India Educators’ Conference (TIIEC), Bangalore, India, 4–5 April 2014; pp. 53–61. [Google Scholar]
- Ghodki, M.K. An Infrared Based Dust Mitigation System Operated by the Robotic Arm for Performance Improvement of the Solar Panel. Sol. Energy 2022, 244, 343–361. [Google Scholar] [CrossRef]
- Yan, S.; Jian, Y.; Xu, L.J. Research on Design of Intelligent Cleaning Robot for Solar Panel. In Proceedings of the the 20th International Conference on Electronic Business, Hong Kong, China, 5 December 2020. [Google Scholar]
- GWEC Global Wind Report. Available online: https://gwec.net/wp-content/uploads/2021/03/GWEC-Global-Wind-Report-2021.pdf (accessed on 10 June 2024).
- Bernardini, S.; Jovan, F.; Jiang, Z.; Watson, S.; Weightman, A.; Moradi, P.; Richardson, T.; Sadeghian, R.; Sareh, S. A Multi-Robot Platform for the Autonomous Operation and Maintenance of Offshore Wind Farms. In Proceedings of the 19th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2020), Auckland, New Zealand, 9 May 2020. [Google Scholar]
- Franko, J.; Du, S.; Kallweit, S.; Duelberg, E.; Engemann, H. Design of a Multi-Robot System for Wind Turbine Maintenance. Energies 2020, 13, 2552. [Google Scholar] [CrossRef]
- Kanellakis, C.; Fresk, E.; Mansouri, S.S.; Kominiak, D.; Nikolakopoulos, G. Towards Visual Inspection of Wind Turbines: A Case of Visual Data Acquisition Using Autonomous Aerial Robots. IEEE Access 2020, 8, 181650–181661. [Google Scholar] [CrossRef]
- Li, Z.; Tokhi, M.O.; Zhao, Z.; Zheng, H. A Compact Laser Shearography System for On-Site Robotic Inspection of Wind Turbine Blades. JAIT 2021. [Google Scholar] [CrossRef]
- Engemann, H.; Cönen, P.; Dawar, H.; Du, S.; Kallweit, S. A Robot-Assisted Large-Scale Inspection of Wind Turbine Blades in Manufacturing Using an Autonomous Mobile Manipulator. Appl. Sci. 2021, 11, 9271. [Google Scholar] [CrossRef]
- Liu, J.-H.; Padrigalan, K. Design and Development of a Climbing Robot for Wind Turbine Maintenance. Appl. Sci. 2021, 11, 2328. [Google Scholar] [CrossRef]
- Jiang, Z.; Jovan, F.; Moradi, P.; Richardson, T.; Bernardini, S.; Watson, S.; Weightman, A.; Hine, D. A Multirobot System for Autonomous Deployment and Recovery of a Blade Crawler for Operations and Maintenance of Offshore Wind Turbine Blades. J. Field Robot. 2023, 40, 73–93. [Google Scholar] [CrossRef]
- Yang, P.; Zhang, M.; Sun, L.; Li, X. Design and Control of a Crawler-Type Wall-Climbing Robot System for Measuring Paint Film Thickness of Offshore Wind Turbine Tower. J. Intell. Robot. Syst. 2022, 106, 50. [Google Scholar] [CrossRef]
- Malik, A.A. Development of a Mobile Robot Assistant for Wind Turbines Manufacturing. arXiv 2022, arXiv:2208.03584. Available online: http://arxiv.org/abs/2208.03584 (accessed on 10 September 2024).
- Liu, Y.; Hajj, M.; Bao, Y. Review of Robot-Based Damage Assessment for Offshore Wind Turbines. Renew. Sustain. Energy Rev. 2022, 158, 112187. [Google Scholar] [CrossRef]
- Cieslak, C.; Shah, A.; Clark, B.; Childs, P. Wind-Turbine Inspection, Maintenance and Repair Robotic System. In Proceedings of the Volume 14: Wind Energy, Boston, MA, USA, 26 June 2023; American Society of Mechanical Engineers; p. V014T37A004. Available online: https://asmedigitalcollection.asme.org/GT/proceedings/GT2023/87127/V014T37A004/1168596 (accessed on 10 September 2024).
- Zhang, H.; Li, J.; Kang, F.; Zhang, J. Monitoring and Evaluation of the Repair Quality of Concrete Cracks Using Piezoelectric Smart Aggregates. Constr. Build. Mater. 2022, 317, 125775. [Google Scholar] [CrossRef]
- Erol, S.; Erol, B.; Ayan, T. A General Review Of The Deformation Monitoring Techniques And A Case Study: Analysing Deformations Using Gps/Levelling. In Proceedings of the XXth ISPRS Congress Technical Commission VII, Istanbul, Turkey, 12 July 2004; pp. 622–627. [Google Scholar]
- Hong, K.; Wang, H.; Yuan, B.; Wang, T. Multiple Defects Inspection of Dam Spillway Surface Using Deep Learning and 3D Reconstruction Techniques. Buildings 2023, 13, 285. [Google Scholar] [CrossRef]
- Bigman, D.P. Evaluating the Feasibility of Robotic Crawler Deployed Ground Penetrating Radar to Assess Repairs of a Concrete Hydroelectric Dam Spillway in Alabama, USA. Water 2023, 15, 1858. [Google Scholar] [CrossRef]
- Pinto, M.F.; Honorio, L.M.; Melo, A.; Marcato, A.L.M. A Robotic Cognitive Architecture for Slope and Dam Inspections. Sensors 2020, 20, 4579. [Google Scholar] [CrossRef]
- Patil, S.; Jacob, A.A.; Upadhyay, V.; Jhunjhunwala, T.; Balasubramanian, K. Robotic Ultrasonic Pulse Velocimetry for Submerged Concrete Assets. J. Non Destr. Test. Eval. 2023, 20, 58–66. [Google Scholar]
- Sakagami, N.; Yumoto, Y.; Takebayashi, T.; Kawamura, S. Development of Dam Inspection Robot with Negative Pressure Effect Plate. J. Field Robot. 2019, 36, 1422–1435. [Google Scholar] [CrossRef]
- Kohut, P.; Giergiel, M.; Cieslak, P.; Ciszewski, M.; Buratowski, T. Underwater Robotic System for Reservoir Maintenance. J. Vibroeng. 2016, 18, 3757–3767. [Google Scholar] [CrossRef]
- Li, Y.; Bao, T.; Xu, B.; Shu, X.; Zhou, Y.; Du, Y.; Wang, R.; Zhang, K. A Deep Residual Neural Network Framework with Transfer Learning for Concrete Dams Patch-Level Crack Classification and Weakly-Supervised Localization. Measurement 2022, 188, 110641. [Google Scholar] [CrossRef]
- Li, X.; Sun, H.; Song, T.; Zhang, T.; Meng, Q. A Method of Underwater Bridge Structure Damage Detection Method Based on a Lightweight Deep Convolutional Network. IET Image Process. 2022, 16, 3893–3909. [Google Scholar] [CrossRef]
- Chen, D.; Huang, B.; Kang, F. A Review of Detection Technologies for Underwater Cracks on Concrete Dam Surfaces. Appl. Sci. 2023, 13, 3564. [Google Scholar] [CrossRef]
- Qi, Z.; Liu, D.; Zhang, J.; Chen, J. Micro-Concrete Crack Detection of Underwater Structures Based on Convolutional Neural Network. Mach. Vis. Vision. Appl. 2022, 33, 74. [Google Scholar] [CrossRef]
- Shi, P.; Fan, X.; Ni, J.; Wang, G. A Detection and Classification Approach for Underwater Dam Cracks. Struct. Health Monit. 2016, 15, 541–554. [Google Scholar] [CrossRef]
- Hazel, B.; Côté, J.; Laroche, Y.; Mongenot, P. Field Repair and Construction of Large Hydropower Equipment with a Portable Robot. J. Field Robot. 2012, 29, 102–122. [Google Scholar] [CrossRef]
- Thuot, D.; Liu, Z.; Champliaud, H.; Beaudry, J.; Richard, P.-L.; Blain, M. Remote Robotic Underwater Grinding System and Modeling for Rectification of Hydroelectric Structures. Robot. Comput. -Integr. Manuf. 2013, 29, 86–95. [Google Scholar] [CrossRef]
- Ekren, N.; Karagöz, Z.; Şahin, M. A Review of Line Suspended Inspection Robots for Power Transmission Lines. J. Electr. Eng. Technol. 2024, 19, 2549–2583. [Google Scholar] [CrossRef]
- Ahmed, F.; Mohanta, J.C.; Keshari, A. Power Transmission Line Inspections: Methods, Challenges, Current Status and Usage of Unmanned Aerial Systems. J. Intell. Robot. Syst. 2024, 110, 54. [Google Scholar] [CrossRef]
- Jing, Y.Z.; Liao, H.J.; Zhang, C.H.; Peng, T.; Liao, Z.Z.; Liu, F. Design of auto detection system for high-voltage insulator inspection robot. In Proceedings of the 2017 International Conference on Robotics and Automation Sciences (ICRAS), Hong Kong, China, 26–29 August 2017. [Google Scholar] [CrossRef]
- Wale, P.B.; Kamal, S.K. Maintenance of transmission line by using robot. In Proceedings of the 2016 International Uonference on Uutomatic Uontrol and Uynamic Uptimization Uechniques (ICACDOT), Pune, India, 9–10 September 2016. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Y.; Rui, X. Mechanism and characteristic of rain-induced vibration on high-voltage transmission line. J. Mech. Sci. Technol. 2012, 26, 2505–2510. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Y.; Ma, Z. Investigation on aerodynamic instability of high-voltage transmission lines under rain-wind condition. J. Mech. Sci. Technol. 2015, 29, 131–139. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Y. Modeling and mechanism of rain-wind induced vibration of bundled conductors. Shock. Vib. 2016, 2016, 1038150. [Google Scholar] [CrossRef]
- Wu, G.; Xu, X.; Xiao, H.; Dai, J.; Xiao, X.; Huang, Z.; Ruan, L. A novel self-navigated inspection robot along high-voltage power transmission line and its application. In Proceedings of the Intelligent Robotics and Applications First International Conference (ICIRA 2008), Wuhan, China, 15–17 October 2008. [Google Scholar] [CrossRef]
- Wu, G.; Cao, H.; Xu, X.; Xiao, H.; Li, S.; Xu, Q.; Liu, B.; Wang, Q.; Wang, Z.; Ma, Y. Design and application of inspection system in a self-governing mobile robot system for high voltage transmission line inspection. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 27–31 March 2009. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, H.; Fang, L.; Zhao, M.; Zhou, J. Algorithm research of inspection robot for searching for pose of overhead ground wires. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006. [Google Scholar] [CrossRef]
- Toussaint, K.; Pouliot, N.; Montambault, S. Transmission line maintenance robots capable of crossing obstacles: State-of-the-art review and challenges ahead. J. Field Robot. 2009, 26, 477–499. [Google Scholar] [CrossRef]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- CIGRE. The use of robotics in assessment and maintenance of overhead lines. In Proceedings of the Technical Brochure of 13th annual CIGRE Canada Conference on Power Systems, Calgary, AB, Canada, 15–18 October 2018. [Google Scholar]
- Nayyerloo, M.; Chen, X.; Wang, W.; Chase, J. Cable-climbing robots for power transmission lines inspection. In Mobile Robots—State of the Art in Land, Sea, Air, and Collaborative Missions; Chen, X.Q., Chen, Y.Q., Chase, J.G., Eds.; IntechOpen: London, UK, 2009; Chapter 4; pp. 63–84. [Google Scholar] [CrossRef]
- Elizondo, D.; Gentile, T.; Candia, H.; Bell, G. Overview of robotic applications for energized transmission line work—Technologies, field projects and future developments. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010. [Google Scholar] [CrossRef]
- Gonçalves, R.S.; Carvalho, J.C.M. Review and latest trends in mobile robots used on power transmission lines. Int. J. Adv. Robot. Syst. 2013, 10, 1–14. [Google Scholar] [CrossRef]
- Pagnano, A.; Höpf, M.; Teti, R. A roadmap for automated power line inspection. Maintenance and repair. Procedia CIRP 2013, 12, 234–239. [Google Scholar] [CrossRef]
- Seok, K.H.; Kim, Y.S. A state of the art of power transmission line maintenance robots. J. Electr. Eng. Technol. 2016, 11, 1412–1422. [Google Scholar] [CrossRef]
- Li, L.; Li, N.; Li, Y.; Zhang, B.; Zhao, J.; Zhang, C.; Dai, Z. A state-of-the-art survey of the robotics applied for the power industry in China. In Proceedings of the 2016 4th International Conference on Applied Robotics for the Power Industry (CARPI), Jinan, China, 11–13 October 2016. [Google Scholar] [CrossRef]
- Phillips, A.; Engdahl, E.; McGuire, D.; Major, M.; Bartlett, G. Autonomous overhead transmission line inspection robot (TI) development and demonstration. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012. [Google Scholar] [CrossRef]
- Zheng, L.; Yi, R. Obstacle negotiation control for a mobile robot suspended on overhead ground wires by optoelectronic sensors. In Proceedings of the 2009 International Conference on Optical Instruments and Technology: Advanced Sensor Technologies and Applications, Shanghai, China, 19–22 October 2009. [Google Scholar] [CrossRef]
- Guanghong, T.; Lijin, F. A multi-unit serial inspection robot for power transmission lines. Ind. Robot. 2019, 46, 223–234. [Google Scholar] [CrossRef]
- Debenest, P.; Guarnieri, M.; Takita, K.; Fukushima, E.F.; Hirose, S.; Tamura, K.; Kimura, A.; Kubokawa, H.; Iwama, N.; Shiga, F.; et al. Toward a Practical Robot for Inspection of High-Voltage Lines. In Field and Service Robotics; Springer Tracts in Advanced Robotics; Howard, A., Iagnemma, K., Kelly, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 62, pp. 45–55. [Google Scholar] [CrossRef]
- Chen, Y.; Fang, Z.; Liu, S.; Wang, Y.; Zhong, C.; Cai, C.; Zhang, Y.; Wei, Y.; Wang, Z. A soft-robotic gripper for ultra-high-voltage transmission line operations. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; Available online: https://ieeexplore.ieee.org/document/9347270 (accessed on 10 September 2024).
- Nie, Y.; Jiao, C.; Fan, Y. Active shielding design of patrol robot wireless charging system. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019. [Google Scholar] [CrossRef]
- Sawada, J.; Kusumoto, K.; Maikawa, Y.; Munakata, T.; Ishikawa, Y. A mobile robot for inspection of power transmission lines. IEEE Trans. Power Deliv. 1991, 6, 309–315. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, H.; Fang, L.; Zhao, M.; Zhou, J. Dual arms running control method of inspection robot based on obliquitous sensor. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006. [Google Scholar] [CrossRef]
- Dian, S.; Wen, X.; Dong, H.; Weng, T. Development of a self-balance dual-arm robot for inspection of high-voltage power transmission lines. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012. [Google Scholar] [CrossRef]
- Katrašnik, J.; Pernuš, F.; Likar, B. A climbing-flying robot for power line inspection. In Climbing and Walking Robots; Miripour, B., Ed.; IntechOpen: London, UK, 2010; Chapter 6; pp. 95–110. [Google Scholar] [CrossRef]
- Chang, W.; Yang, G.; Yu, J.; Liang, Z.; Cheng, L.; Zhou, C. Development of a power line inspection robot with hybrid operation modes. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 24–28 September 2017. [Google Scholar] [CrossRef]
- Mirallès, F.; Hamelin, P.; Lambert, G.; Lavoie, S.; Pouliot, N.; Montfrond, M.; Montambault, S. LineDrone technology: Landing an unmanned aerial vehicle on a power line. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. [Google Scholar] [CrossRef]
- Iftikhar, H.; Sarquis, E.; Branco, P.J.C. Why Can Simple Operation and Maintenance (O&M) Practices in Large-Scale Grid-Connected PV Power Plants Play a Key Role in Improving Its Energy Output? Energies 2021, 14, 3798. [Google Scholar] [CrossRef]
- Keisang, K.; Bader, T.; Samikannu, R. Review of operation and maintenance methodologies for solar photovoltaic microgrids. Front. Energy Res. 2021, 9, 730230. [Google Scholar] [CrossRef]
- Spencer, B.F.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222, ISSN 2095-8099. [Google Scholar] [CrossRef]
- Zou, J.T.; Rajveer, G.V. Drone-based solar panel inspection with 5G and AI Technologies. In Proceedings of the 2022 8th International Conference on Applied System Innovation (ICASI), Nantou, Taiwan, 22–23 April 2022; pp. 174–178. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the 28th International Conference on Neural Information Processing Systems, Montreal, Canada, 7–12 December 2015; Available online: https://papers.nips.cc/paper_files/paper/2015 (accessed on 18 July 2024).
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Proceedings of the Conference on Advances in Neural Information Processing Systems 29 (NIPS 2016), Barcelona, Spain, 5–10 December 2016; Available online: https://papers.nips.cc/paper_files/paper/2016 (accessed on 18 July 2024).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Uonference on Uomputer Uision and Uattern Uecognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the AAAI conference on artificial intelligence (AAAI-17), San Francisco, CA, USA, 4–9 February 2017; Available online: https://aaai.org/papers/11231-aaai-31-2017/ (accessed on 22 July 2024).
- Liu, Z.; Li, X.; Luo, P.; Loy, C.C.; Tang, X. Semantic image segmentation via deep parsing network. In Proceedings of the IEEE International conference on computer vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1377–1385. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE international conference on computer vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar] [CrossRef]
- Bhujade Rajeev, M.; Adithya, V.; Hrishikesh, S.; Balamurali, P. Detection of power-lines in complex natural surroundings. In Proceedings of the Second International Conference on Information Technology Convergence and Services (ITCSE 2013), Bangalore, India, 20–21 December 2013; Available online: https://airccj.org/CSCP/vol3/csit3910.pdf (accessed on 22 July 2024).
- Li, Z.; Liu, Y.; Hayward, R.; Zhang, J.; Cai, J. Knowledge-based power line detection for UAV surveillance and inspection systems. In Proceedings of the 2008 23rd International Conference Image and Vision Computing New Zealand, Christchurch, New Zealand, 26–28 November 2008; Available online: https://ieeexplore.ieee.org/document/4762118 (accessed on 10 September 2024).
- Peeters, C.; Guillaume, P.; Helsen, J. Vibration-based bearing fault detection for operations and maintenance cost reduction in wind energy. Renew. Energy 2018, 116, 74–87. [Google Scholar] [CrossRef]
- Huang, B.; Zhao, S.; Kang, F. Image-based automatic multiple-damage detection of concrete dams using region-based convolutional neural networks. J. Civil. Struct. Health Monit. 2023, 13, 413–429. [Google Scholar] [CrossRef]
- Li, L.; Zhang, H.; Pang, J.; Huang, J. Dam surface crack detection based on deep learning. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019; pp. 738–743. [Google Scholar]
- Osman, A.I.; Chen, L.; Yang, M.; Msigwa, G.; Farghali, M.; Fawzy, S.; Rooney, D.W.; Yap, P.S. Cost, environmental impact, and resilience of renewable energy under a changing climate: A review. Environ. Chem. Lett. 2023, 21, 741–764. [Google Scholar] [CrossRef]
- Zhao, S.Z.; Kang, F.; Li, J.J.; Ma, C.B. Structural health monitoring and inspection of dams based on UAV photogrammetry with image 3D reconstruction. Automat. Constr. 2021, 130, 103832. [Google Scholar] [CrossRef]
- De Vito, S.; Del Giudice, A.; Di Francia, G. Electric Transmission and Distribution Network Air Pollution. Sensors 2024, 24, 587. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Proceedings of the 31st International Conference on Neural Information Processing Systems (NIPS 17), Long Beach, California, USA, 4–9 December 2017; Available online: https://dl.acm.org/doi/10.5555/3295222.3295349 (accessed on 10 September 2024).
- Schonberger, J.L.; Frahm, J.M. Structure-from-Motion Revisited. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Available online: https://ieeexplore.ieee.org/document/1640800 (accessed on 10 September 2024).
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar] [CrossRef]
- Krizhevsky, A. Learning Multiple Layers of Features from Tiny Images. Technical Report TR-2009, University of Toronto. 2009. Available online: https://www.cs.toronto.edu/~kriz/learning-features-2009-TR.pdf (accessed on 19 July 2024).
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the 13th European Conference, Zurich, Switzerland, 6–12 September 2014. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Scharstein, D.; Szeliski, R. High-accuracy Stereo Depth Maps Using Structured Light. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Madison, WI, USA, 18–20 June 2003; Available online: https://ieeexplore.ieee.org/document/1211354 (accessed on 10 September 2024).
- Jensen, R.; Dahl, A.L.; Vogiatzis, G.; Tola, E.; Aanæs, H. Large Scale Multi-view Stereopsis Evaluation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Saxena, A.; Goebel, K.; Simon, D.; Eklund, N. Damage Propagation Modeling for Aircraft Engine Run-to-Failure Simulation. In Proceedings of the 1st International Conference on Prognostics and Health Management (PHM08), Denver, CO, USA, 6–9 October 2008. [Google Scholar] [CrossRef]
- Purohit, H.; Tanabe, R.; Ichige, T.; Endo, T.; Nikaido, Y.; Suefusa, K.; Kawaguchi, Y. MIMII Dataset: Sound Dataset for Malfunctioning Industrial Machine Investigation and Inspection. In Proceedings of the Detection and Classification of Acoustic Scenes and Events 2019 Workshop (DCASE2019), New York, NY, USA, 25–26 October 2019; Available online: https://zenodo.org/record/3384388 (accessed on 19 July 2024). [CrossRef]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed With Convolutional Neural Networks. IEEE Trans. Syst. Man. Cybern. Syst. 2020, 50, 1486–1498. [Google Scholar] [CrossRef]
- Tomaszewski, M.; Ruszczak, B.; Michalski, P. The collection of images of an insulator taken outdoors in varying lighting conditions with additional laser spots. Data Brief. 2018, 18, 765–768. [Google Scholar] [CrossRef]
- Bian, J.; Hui, X.; Zhao, X.; Tan, M. A monocular vision–based perception approach for unmanned aerial vehicle close proximity transmission tower inspection. Int. J. Adv. Robot. Syst. 2019, 16, 1729881418820227. [Google Scholar] [CrossRef]
- Yetgin, Ö.E.; Gerek, Ö.N.; Nezih, Ö. Ground truth of powerline dataset (infrared-ir and visible light-vl). Mendeley Data 2017, 8. [Google Scholar]
- Bradbury, K.; Saboo, R.; Johnson, T.L.; Malof, J.M.; Devarajan, A.; Zhang, W.; Collins, L.M.; Newell, R.G. Distributed Solar Photovoltaic Array Location and Extent Data Set for Remote Sensing Object Identification. Sci. Data 2016, 3, 160106. [Google Scholar] [CrossRef]
- DKASC; Alice Springs; DKA Solar Centre. Available online: http://dkasolarcentre.com.au/locations/alice-springs (accessed on 19 July 2024).
- ESOLMET-IER Instituto de Energías Renovables. Available online: http://esolmet.ier.unam.mx/Tipos_consulta.php (accessed on 19 July 2024).
- Sengupta, M.; Xie, Y.; Lopez., A.; Habte, A.; Maclaurin, G.; James, S. The national solar radiation data base (NSRDB). Renew. Sustain. Energy Rev. 2018, 89, 51–60. [Google Scholar] [CrossRef]
- Pierdicca, R.; Paolanti, M.; Felicetti, A.; Piccinini, F.; Zingaretti, P. Automatic Faults Detection of Photovoltaic Farms: SolAIr, a Deep Learning-Based System for Thermal Images. Energies 2020, 13, 6496. [Google Scholar] [CrossRef]
- The Photovoltaic Thermal Images Dataset. Available online: https://vrai.dii.univpm.it/content/photovoltaic-thermal-images-dataset (accessed on 19 July 2024).
- Jung, J.H.; Lim, D.G. Industrial robots, employment growth, and labor cost: A simultaneous equation analysis. Technol. Forecast. Soc. Chang. 2020, 159, 120202. [Google Scholar] [CrossRef]
- IEA. World Energy Employment 2022; IEA: Paris, France, 2022; Available online: https://www.iea.org/reports/world-energy-employment-2022 (accessed on 10 September 2024).

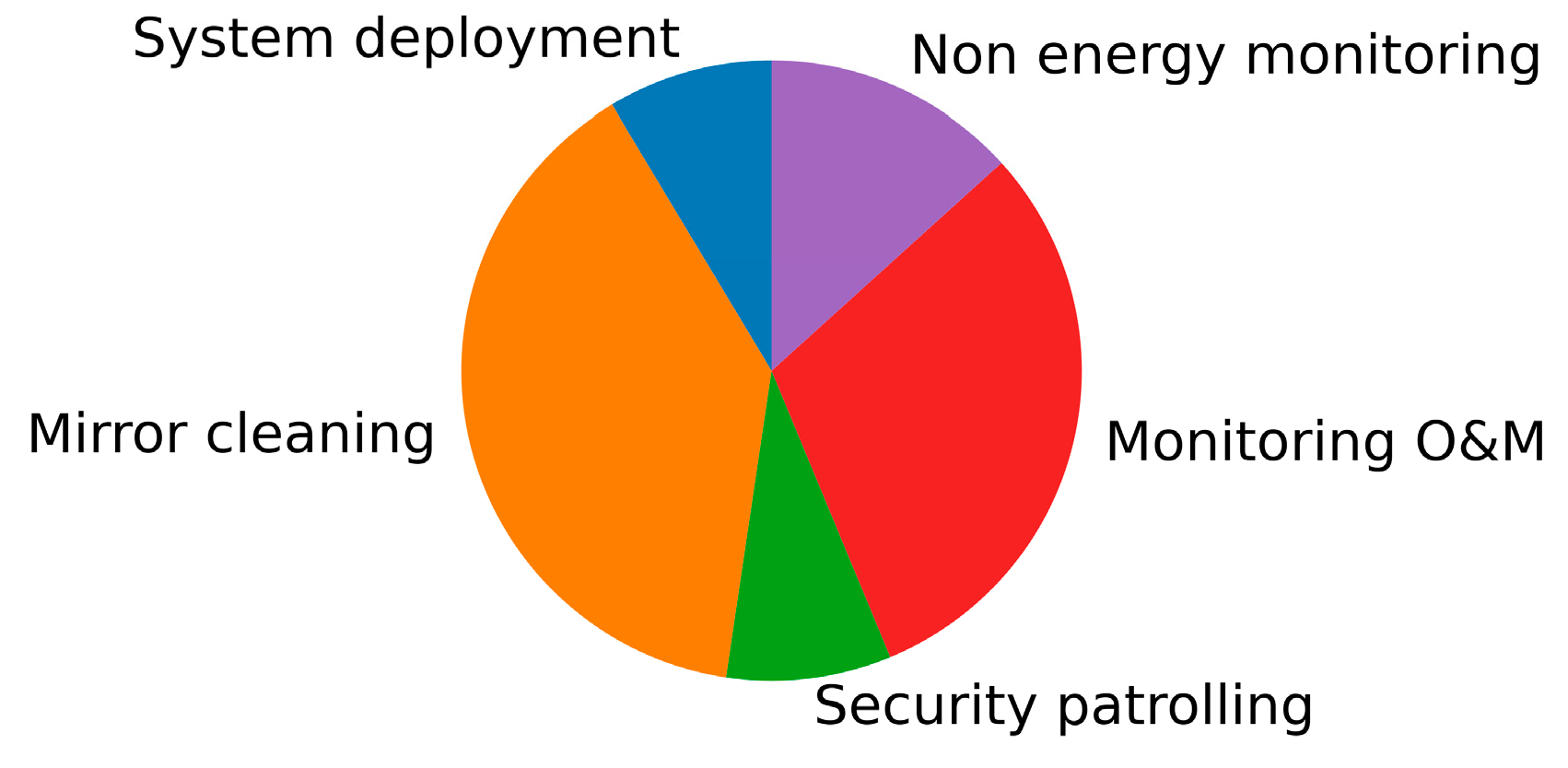
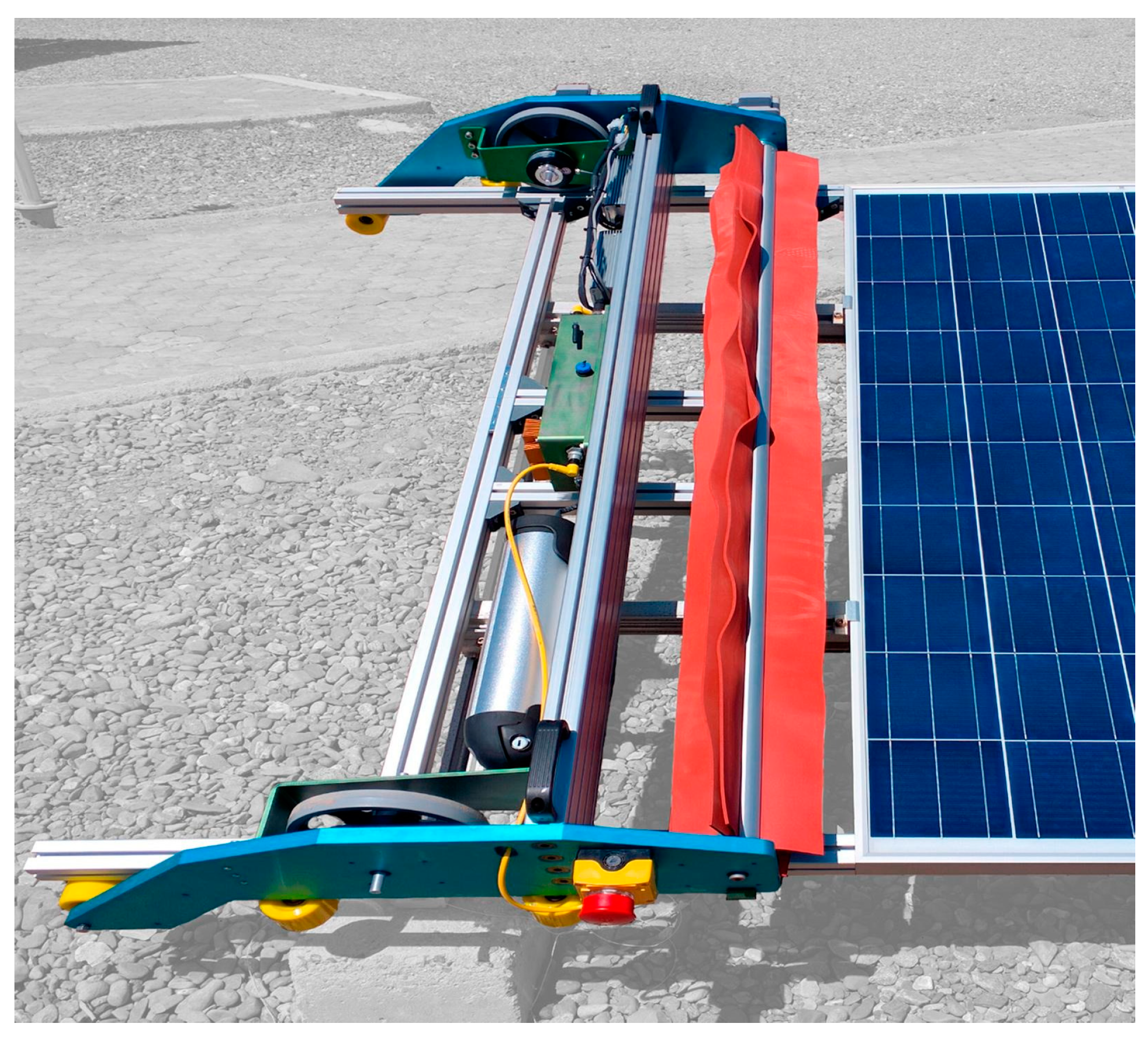
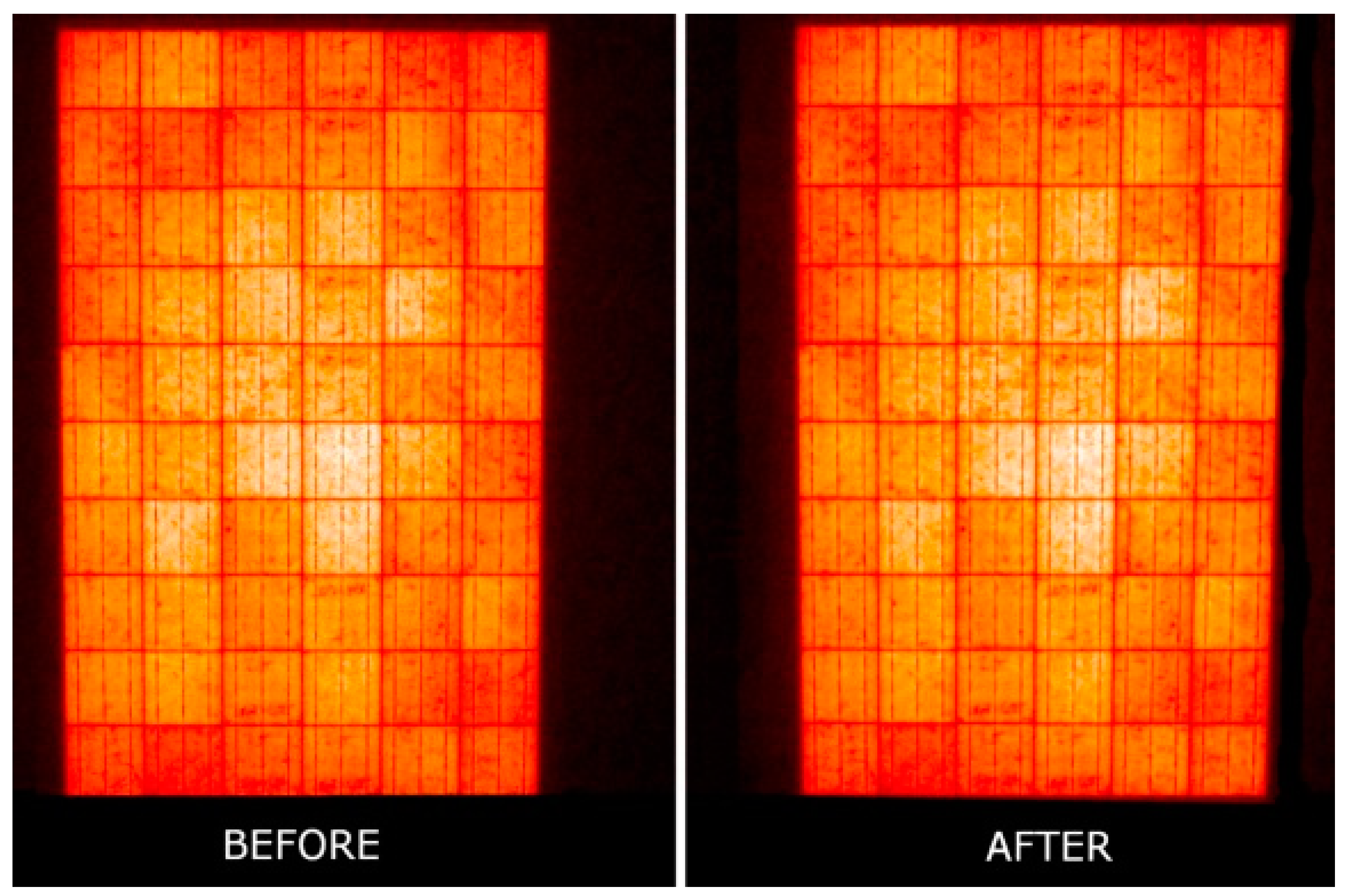
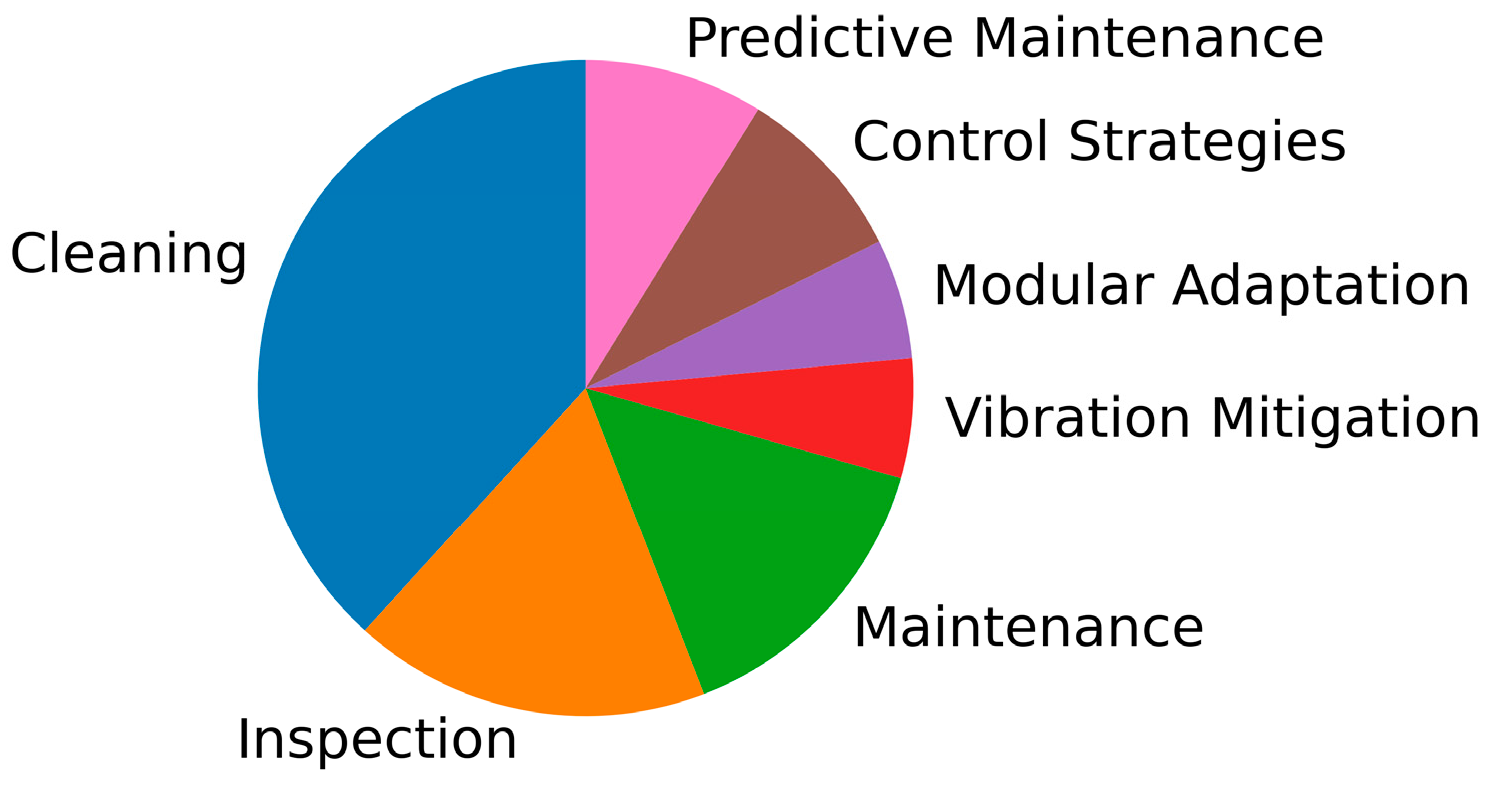

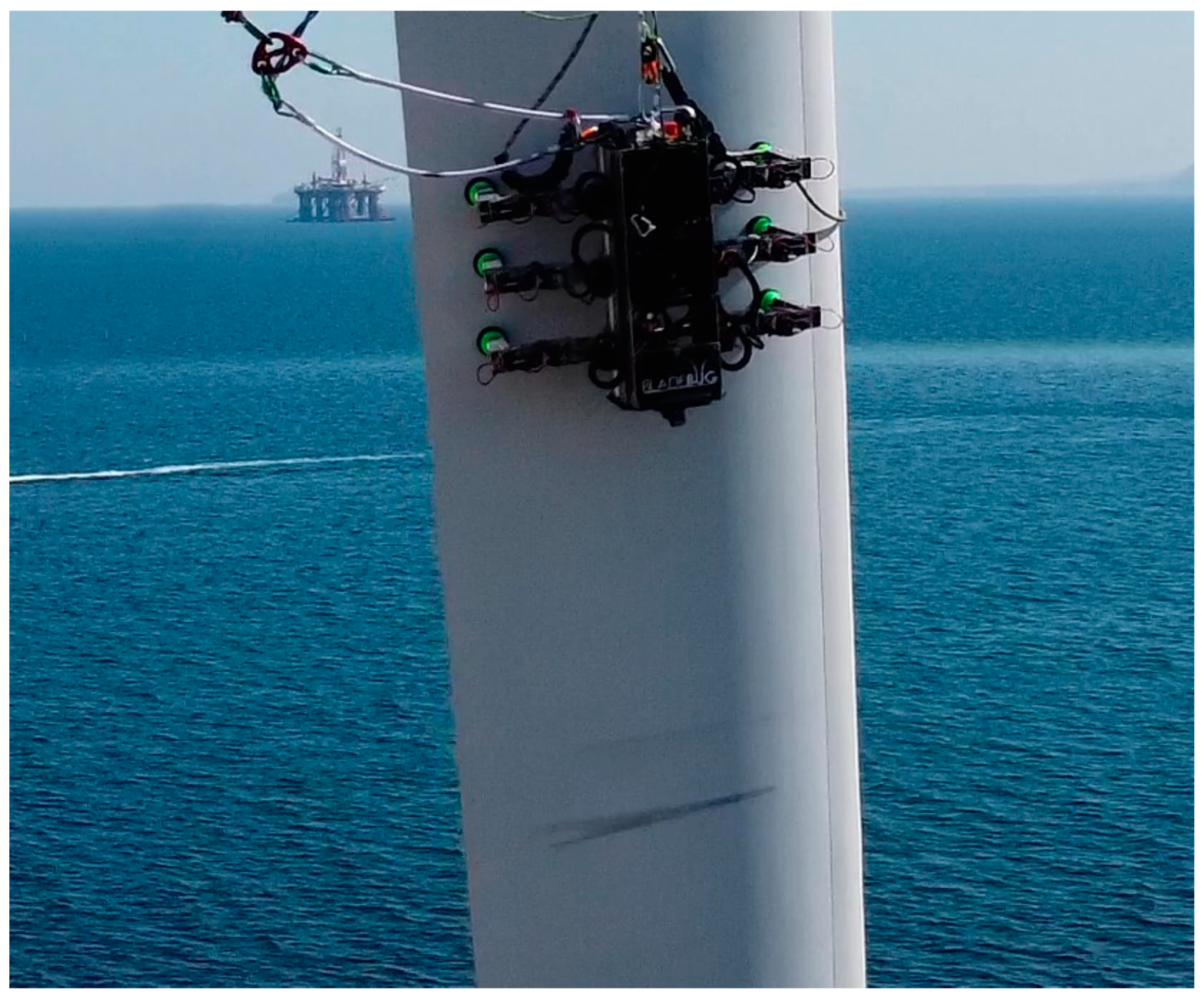
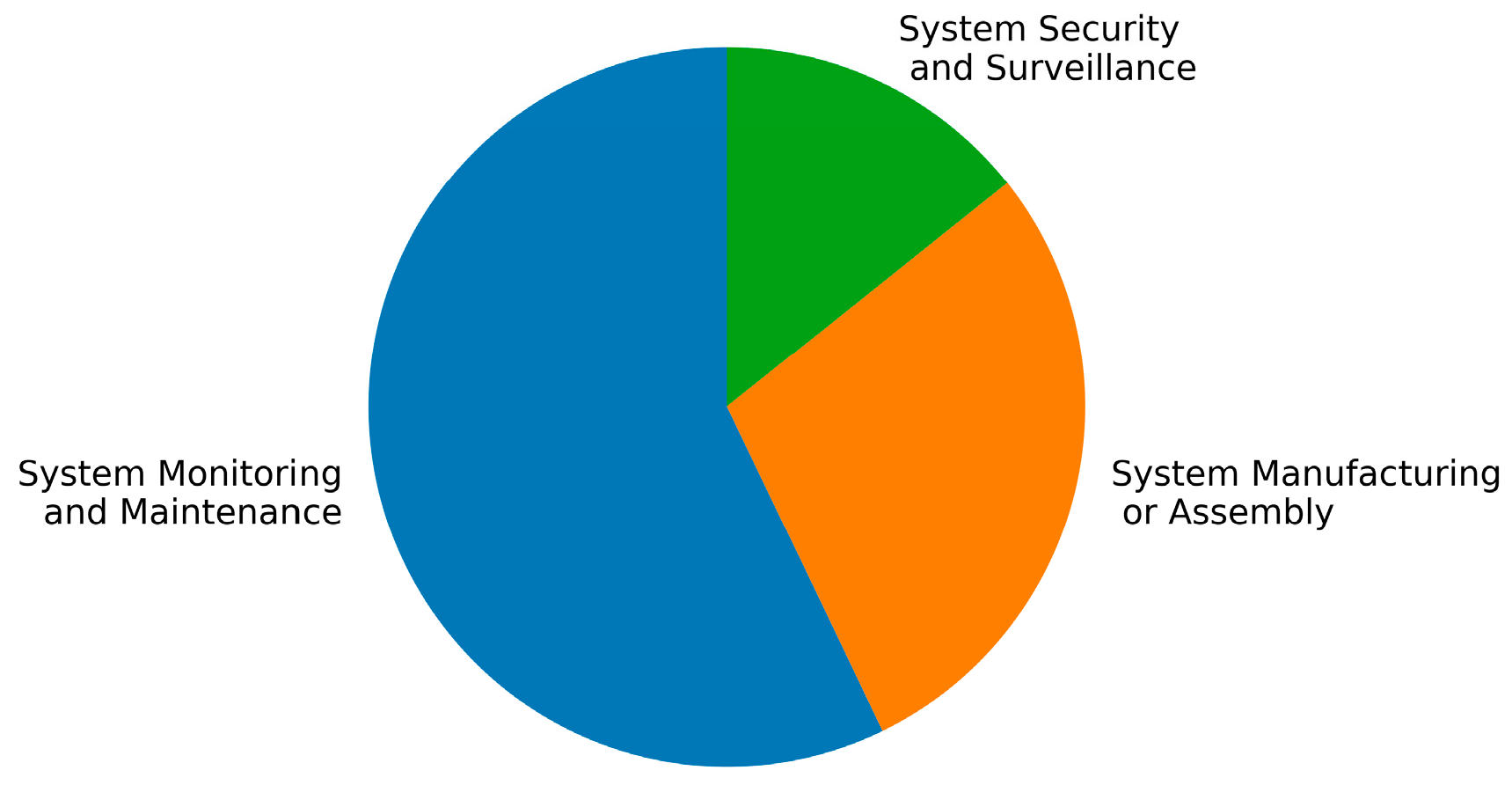

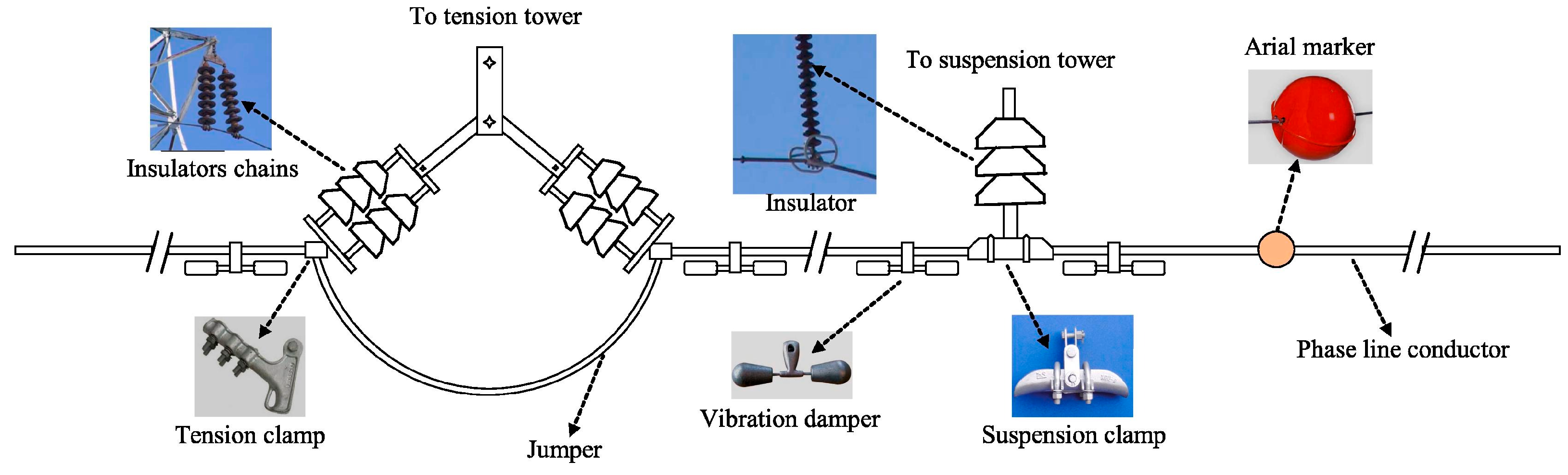
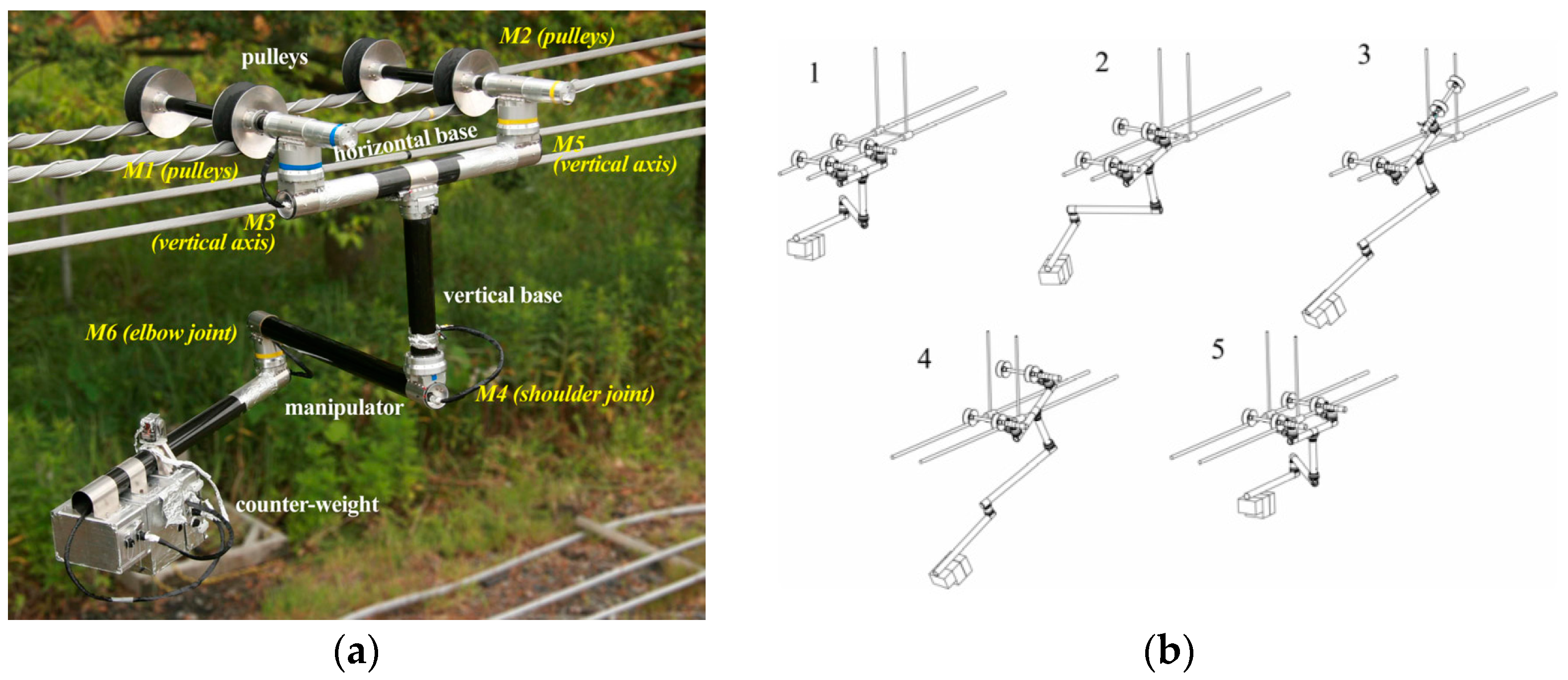
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).