
Robots for the Energy Transition: A Review

 ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
2. The Energy Sector Digitalisation
3. Robot Applications
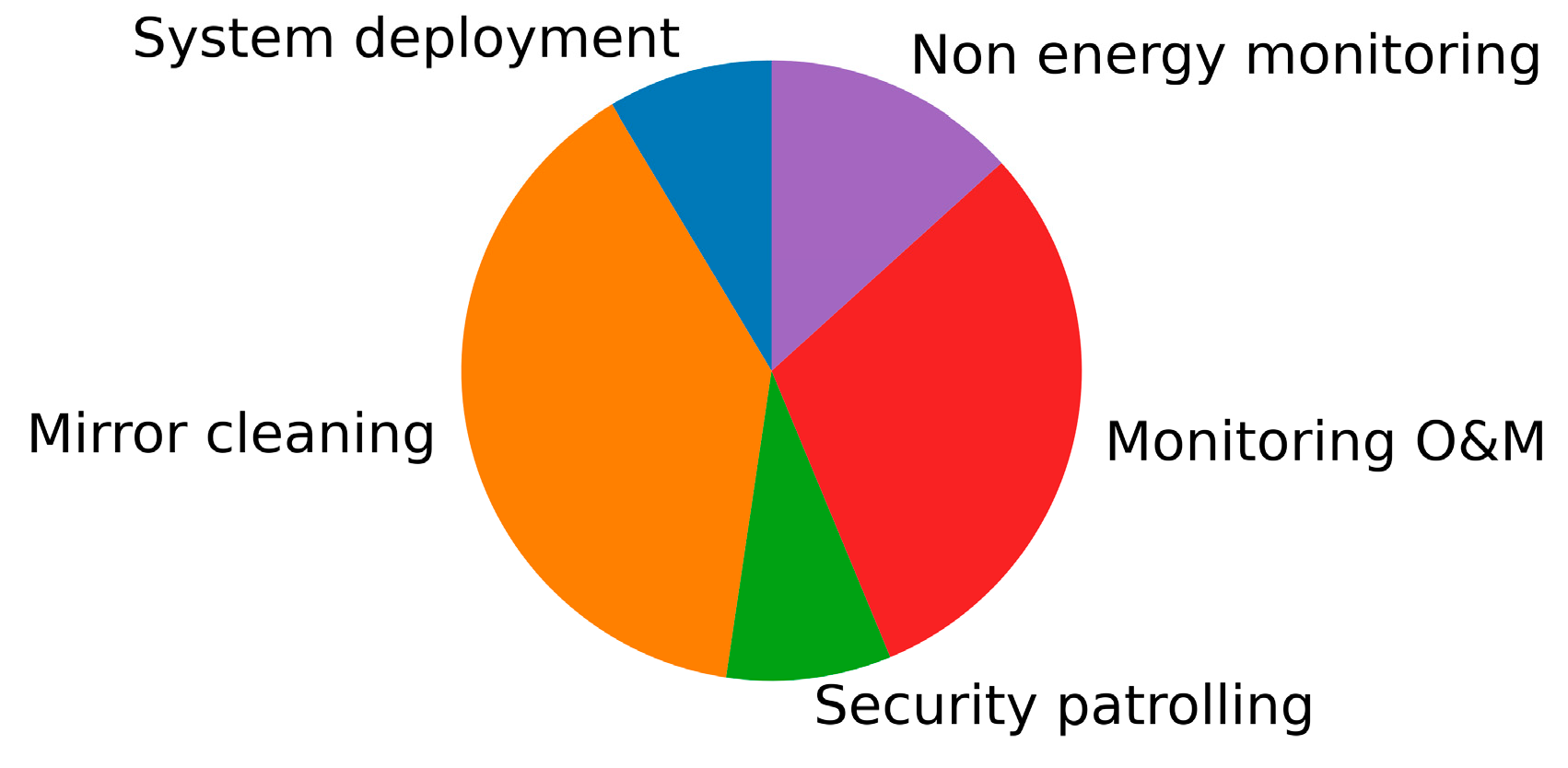
3.1. Robotics in Concentrating Solar Power (CSP)
- the parabolic trough, where a linear parabolic reflector concentrates sunlight onto a receiver positioned along the reflector’s focal line;
- the Fresnel reflectors, where the reflector is composed of many flat mirror strips arranged to reflect sunlight onto an overhanging tube;
- the solar tower, where an array of heliostats, which are dual-axis tracking reflectors, concentrate the radiation on a central receiver on top of a tower;
- the Dish Stirling, composed of a parabolic reflector concentrating light onto a receiver in the focal point of the parabola, similarly to a radio telescope.
- system deployment, i.e., the physical placing of the mirrors;
- mirror cleaning, in order to maximize energy production;
- plant patrolling, for security purposes;
- plant predictive monitoring, for the O&M of plant functionality;
- plant monitoring and maintenance, for issues not directly linked to the plant functionality (e.g., grass mowing or bird shooing away).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robotic task | Parabolic Trough | Fresnel | Solar Tower | Dish Stirling | References |
|---|---|---|---|---|---|
| System deployment | X | X | [42] | ||
| Mirror cleaning | X | X | X | [30,33,34,38,39,41,42] | |
| Security patrolling | X | X | X | X | |
| Monitoring O&M | X | X | X | X | [31,35,36,37] |
| Non energy monitoring | X | X | X | X | |
| References | [33] | [34,38,39] | [30,31,35,36,37,41,42] |
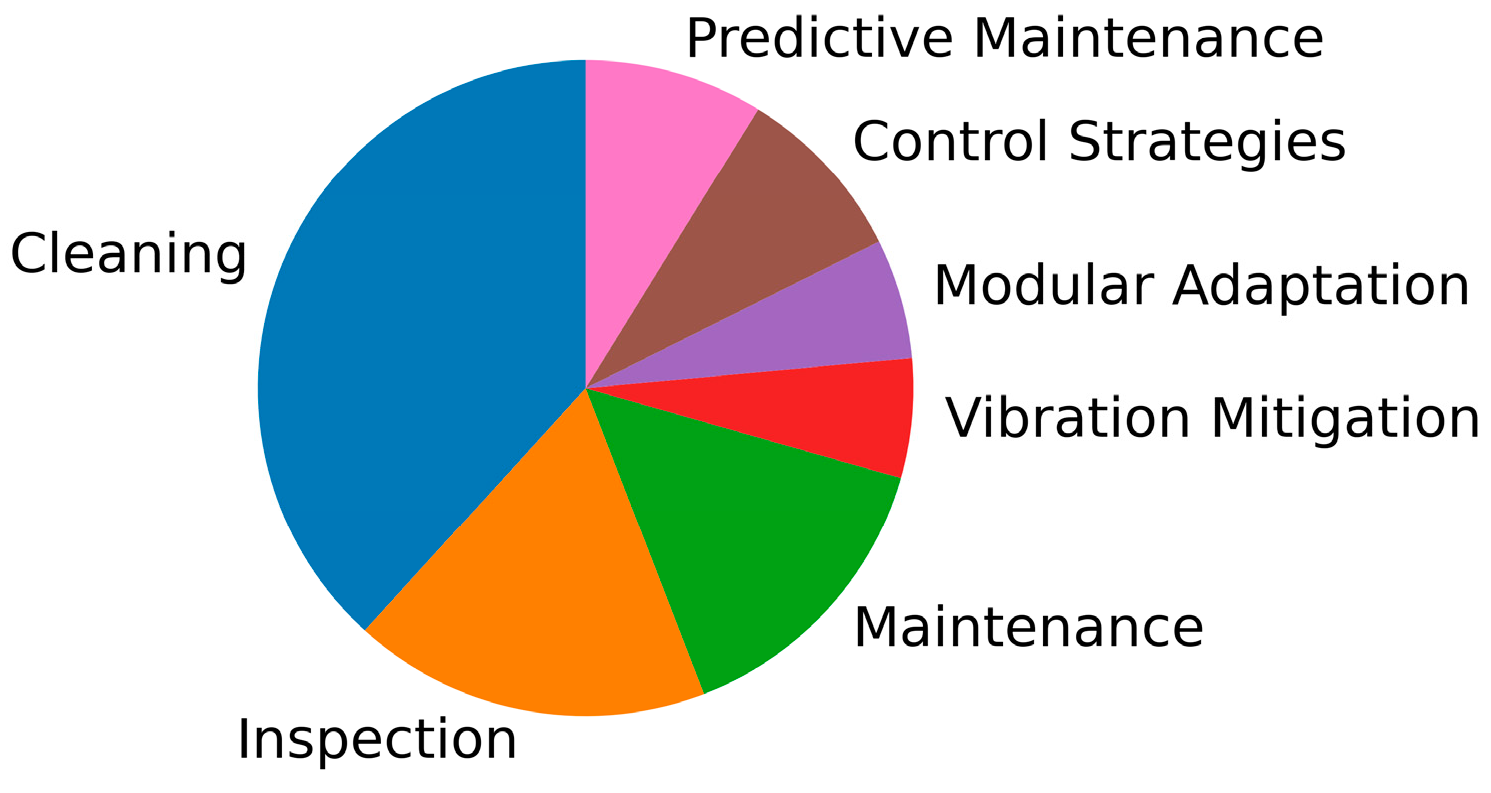
3.2. Robotics in Photovoltaic
| Robotic Task | Desert Env. | Water-Scarce Areas | Large PV Plants | Distributed PV Systems | Hard-to-Reach Areas | General/ Multiple Env. | References |
|---|---|---|---|---|---|---|---|
| Cleaning | X | X | X | X | X | X | [47,48,49,50,51,52,53,54,55,57,59,62,64,66] |
| Inspection | X | X | X | [53,54,55,56,57,58,60] | |||
| Maintenance | X | X | X | [51,57,58,60,63,66] | |||
| Vibration Mitigation | X | [50,61] | |||||
| Modular Adaptation | X | [56,62] | |||||
| Control Strategies | X | [58,61,65] | |||||
| Predictive Maintenance | X | [60,63] | |||||
| References | [49,55,62] | [52,54,59] | [48,53,57,58,60,63,64] | [51,52,63,66] | [53,66] | [47,50,55,56,57,58,60,61,62,63,65] |
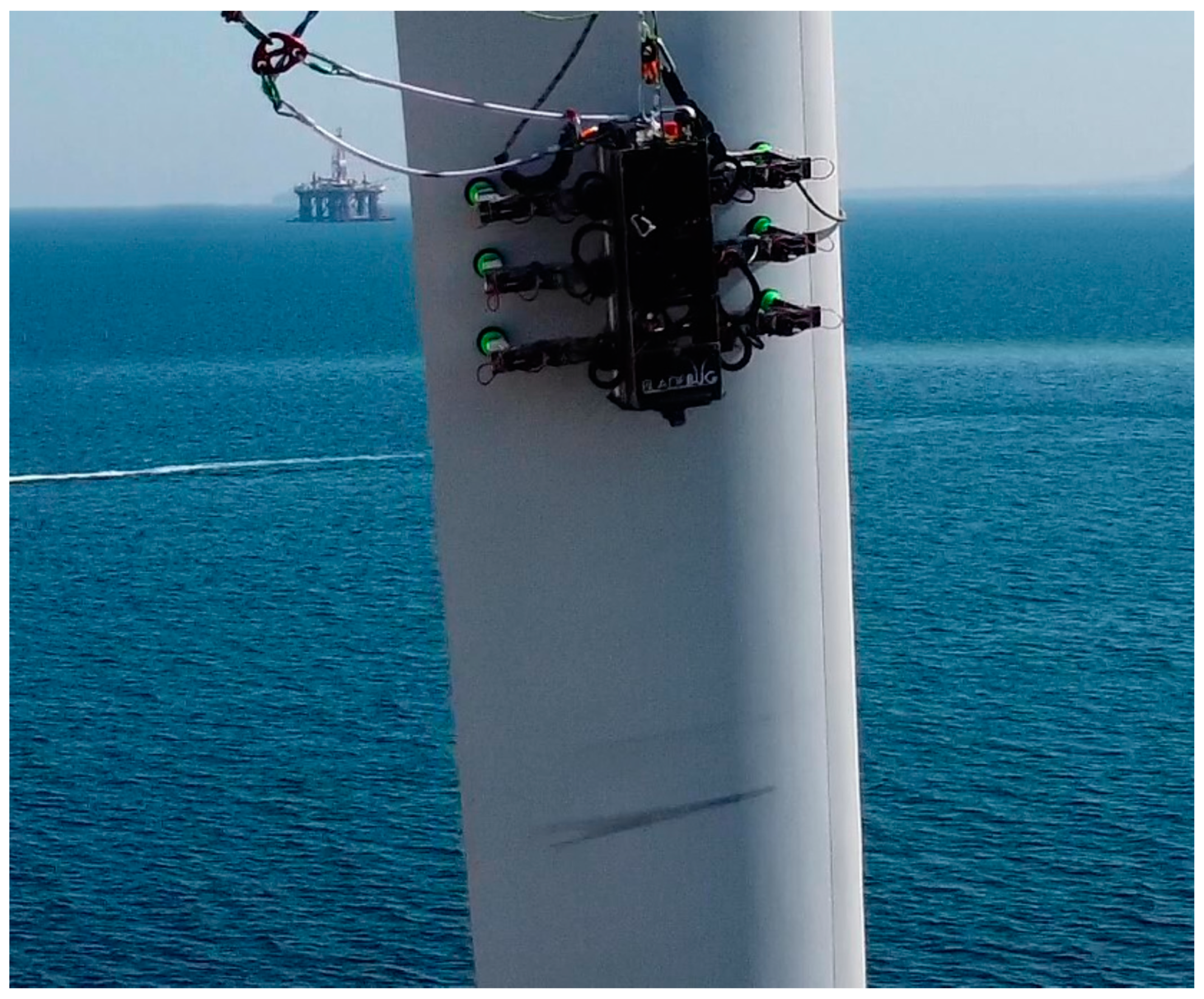
3.3. Robotics for the Wind Farms
- (a)
- the system monitoring and maintenance: made with aerial unmanned vehicles, crawlers/climbers, or underwater robots;
- (b)
- the system manufacturing or assembly: made with the help of robots for rotor blade inspection or to assist the assembly of parts into a wind tower;
- (c)
- system security and surveillance.
| Robotic Task | Onshore Wind Farms | Offshore Wind Farms | Autonomous Operation | Robotic Integration with Human Operators | Advanced Inspection Techniques | References |
|---|---|---|---|---|---|---|
| System Monitoring and Maintenance | X | X | X | X | X | [68,69,70,71,72,74,75,78] |
| System Manufacturing or Assembly | X | X | X | X | X | [69,72,76] |
| System Security and Surveillance | X | X | X | X | X | [68,77] |
| References | [69,72,75,76,77,78] | [68,69,74,75] | [68,70,72,74,76,77,78] | [68,72,74,76,77] | [70,71,72,77,78] |
3.4. Robotics for the Hydroelectric Generation
3.4.1. Above-Surface Monitoring
3.4.2. Below-Surface Level Monitoring
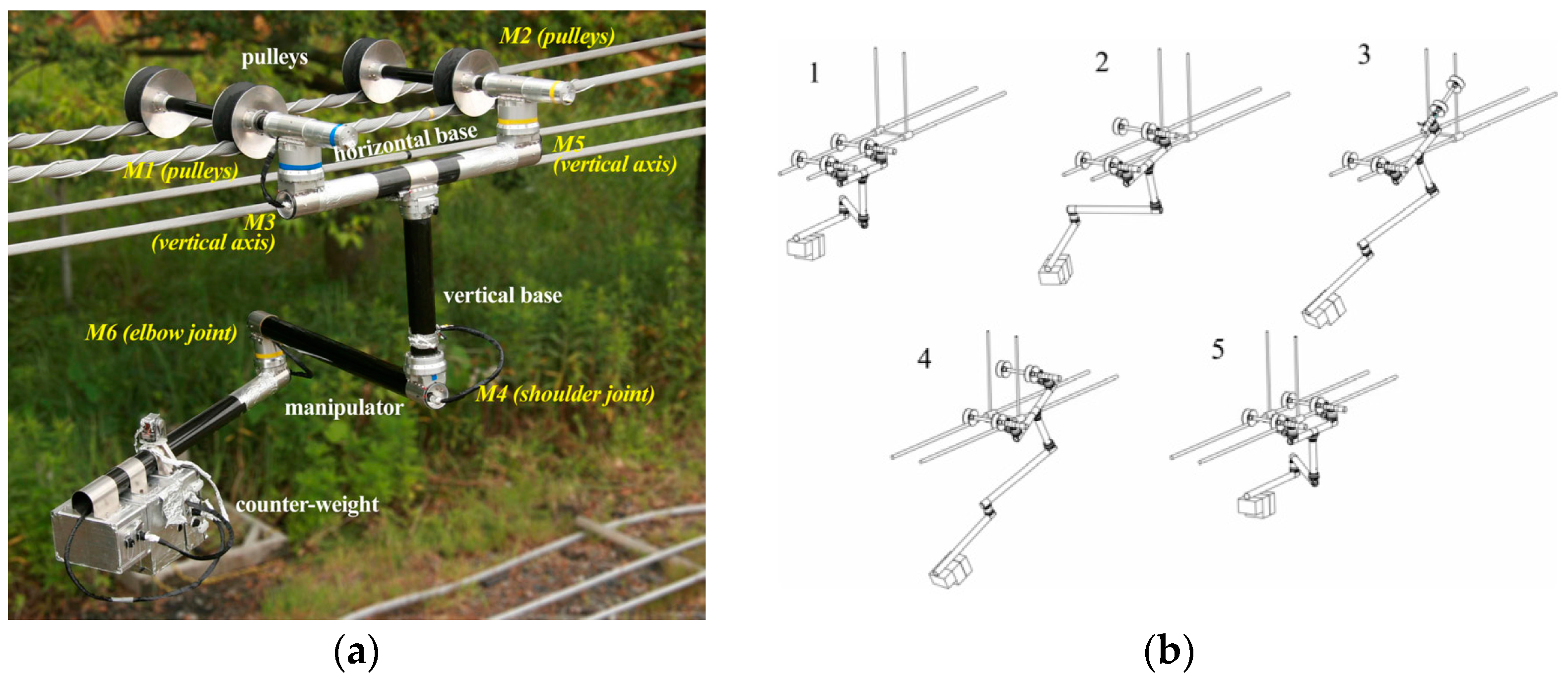
3.5. Robotics for Power Lines
4. Machine Learning
4.1. Localization, Segmentation, and Detection
4.2. Classification
4.3. Three-Dimensional Reconstruction
5. Datasets
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAPEX | Capital expenditure |
| CNN | Convolutional neural network |
| CSP | Concentrated solar power |
| CV | Computer vision |
| DL | Deep learning |
| GPR | Ground-penetrating radar |
| LIDAR | Light detection and ranging |
| MAV | Micro aerial vehicle |
| ML | Machine learning |
| MVS | Multi-view stereo |
| NDT | Non-destructive testing |
| O&M | Operations and maintenance |
| OPEX | Operative expense |
| PV | Photovoltaic |
| R-CNN | Region-based CNN |
| REN | Renewable energies |
| ROV | Remotely operated vehicle |
| SfM | Structure from motion |
| SPCR | Solar panel cleaning robot |
| SSD | Single shot detector |
| UAV | Unmanned aerial vehicle |
| UPV | Ultrasonic pulse velocity |
| ViT | Vision transformers |
References
- Electricity Production by Source, World. Available online: https://ourworldindata.org/grapher/electricity-prod-source-stacked (accessed on 28 June 2024).
- Electricity Grids and Secure Energy Transitions—Analysis—IEA. Available online: https://www.iea.org/reports/electricity-grids-and-secure-energy-transitions (accessed on 28 June 2024).
- Wang, J.; Chen, L.; Tan, Z.; Du, E.; Liu, N.; Ma, J.; Sun, M.; Li, C.; Song, J.; Lu, X.; et al. Inherent Spatiotemporal Uncertainty of Renewable Power in China. Nat. Commun. 2023, 14, 5379. [Google Scholar] [CrossRef] [PubMed]
- Payne, H.J.; Hemming, S.; Van Rens, B.A.P.; Van Henten, E.J.; Van Mourik, S. Quantifying the Role of Weather Forecast Error on the Uncertainty of Greenhouse Energy Prediction and Power Market Trading. Biosyst. Eng. 2022, 224, 1–15. [Google Scholar] [CrossRef]
- Sayed, A.; El-Shimy, M.; El-Metwally, M.; Elshahed, M. Reliability, Availability and Maintainability Analysis for Grid-Connected Solar Photovoltaic Systems. Energies 2019, 12, 1213. [Google Scholar] [CrossRef]
- Zheng, Y.; Wei, J.; Zhu, K.; Dong, B. Reliability Analysis Assessment of the Wind Turbines System under Multi-Dimensions. Adv. Compos. Lett. 2020, 29, 2633366X2096633. [Google Scholar] [CrossRef]
- Limpens, G.; Jeanmart, H. Electricity Storage Needs for the Energy Transition: An EROI Based Analysis Illustrated by the Case of Belgium. Energy 2018, 152, 960–973. [Google Scholar] [CrossRef]
- European Commission; Directorate-General for Energy; Badouard, T.; Moreira de Oliveira, D.; Yearwood, J.; Torres, P.; Altman, M. Cost of Energy (LCOE)—Energy Costs, Taxes and the Impact of Government Interventions on Investments—Final Report; Publications Office: Luxemburg, 2020. [Google Scholar]
- Ramasamy, V.; Zuboy, J.; Woodhouse, M.; O’Shaughnessy, E.; Feldman, D.; Desai, J.; Walker, A.; Margolis, R.; Basore, P. U.S. Solar Photovoltaic System and Energy Storage Cost Benchmarks, with Minimum Sustainable Price Analysis: Q1 2023; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2023. [Google Scholar]
- Solar Construction Automation Solutions|Terabase Energy. Available online: https://www.terabase.energy/products-services/construction (accessed on 28 June 2024).
- Now Publishers—Chapter 1. Introduction to Inspection and Maintenance with Robotics. Available online: https://nowpublishers.com/article/Chapter/9781638282822?cId=978-1-63828-283-9.ch1 (accessed on 28 June 2024).
- Skog, D.A.; Wimelius, H.; Sandberg, J. Digital Disruption. Bus. Inf. Syst. Eng. 2018, 60, 431–437. [Google Scholar] [CrossRef]
- The Disruptive Potential of Energy Digitalization: A Comparative Analysis of German and French Policy-Mixes|LUP Student Papers. Available online: https://lup.lub.lu.se/student-papers/search/publication/9102203 (accessed on 28 June 2024).
- World Energy Outlook 2022—Analysis—IEA. Available online: https://www.iea.org/reports/world-energy-outlook-2022 (accessed on 28 June 2024).
- Weather Forecasts Have Become Much More Accurate; We Now Need to Make Them Available to Everyone—Our World in Data. Available online: https://ourworldindata.org/weather-forecasts (accessed on 28 June 2024).
- AI: Weather Forecasting. Available online: https://www.research.hsbc.com/C/1/1/320/9xhMRr6 (accessed on 28 June 2024).
- Knaut, A.; Obermueller, F. How to Sell Renewable Electricity—Interactions of the Intraday and Day-Ahead Market Under Uncertainty; EWI Working Papers 2016-4; Energiewirtschaftliches Institut an der Universitaet zu Koeln (EWI): Cologne, Germany, 2016. [Google Scholar]
- Das, S.; Swapnarekha, H.; Vimal, S. Integration of Blockchain Technology with Renewable Energy for Sustainable Development: Issues, Challenges and Future Direction. In Computational Intelligence in Pattern Recognition; Das, A.K., Nayak, J., Naik, B., Vimal, S., Pelusi, D., Eds.; Springer Nature Singapore: Singapore, 2023; pp. 595–607. [Google Scholar]
- Khare, V.; Bhatia, M. Renewable Energy Trading: Assessment by Blockchain. Clean. Energy Syst. 2024, 8, 100119. [Google Scholar] [CrossRef]
- Parmiggiani, E.; Mikalef, P. The Case of Norway and Digital Transformation over the Years. In Digital Transformation in Norwegian Enterprises; Mikalef, P., Parmiggiani, E., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 11–18. ISBN 978-3-031-05276-7. [Google Scholar] [CrossRef]
- Hajjaj, C.; El Ydrissi, M.; Azouzoute, A.; Oufadel, A.; El Alani, O.; Boujoudar, M.; Abraim, M.; Ghennioui, A. Comparing Photovoltaic Power Prediction: Ground-Based Measurements vs. Satellite Data Using an ANN Model. IEEE J. Photovolt. 2023, 13, 998–1006. [Google Scholar] [CrossRef]
- Benti, N.E.; Chaka, M.D.; Semie, A.G. Forecasting Renewable Energy Generation with Machine Learning and Deep Learning: Current Advances and Future Prospects. Sustainability 2023, 15, 7087. [Google Scholar] [CrossRef]
- Gong, L.; Chen, Y. Machine Learning-Enhanced loT and Wireless Sensor Networks for Predictive Analysis and Maintenance in Wind Turbine Systems. Int. J. Intell. Netw. 2024, 5, 133–144. [Google Scholar] [CrossRef]
- Del Rio, A.M.; Ramirez, I.S.; Marquez, F.P.G. Photovoltaic Solar Power Plant Maintenance Management Based on IoT and Machine Learning. In Proceedings of the IEEE 2021 International Conference on Innovation and Intelligence for Informatics, Computing, and Technologies (3ICT), Zallaq, Bahrain, 29 September 2021; pp. 423–428. [Google Scholar]
- Ferlito, S.; Ippolito, S.; Santagata, C.; Schiattarella, P.; Di Francia, G. A Study on an IoT-Based SCADA System for Photovoltaic Utility Plants. Electronics 2024, 13, 2065. [Google Scholar] [CrossRef]
- Steffen, B.; Beuse, M.; Tautorat, P.; Schmidt, T.S. Experience Curves for Operations and Maintenance Costs of Renewable Energy Technologies. Joule 2020, 4, 359–375. [Google Scholar] [CrossRef]
- Xing, L.; Sizov, G.; Gundersen, O.E. Digital Transformation in Renewable Energy: Use Cases and Experiences from a Nordic Power Producer. In Digital Transformation in Norwegian Enterprises; Mikalef, P., Parmiggiani, E., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 63–89. ISBN 978-3-031-05276-7. [Google Scholar] [CrossRef]
- Rekeraho, A.; Cotfas, D.T.; Cotfas, P.A.; Bălan, T.C.; Tuyishime, E.; Acheampong, R. Cybersecurity Challenges in IoT-Based Smart Renewable Energy. Int. J. Inf. Secur. 2024, 23, 101–117. [Google Scholar] [CrossRef]
- Rodat, S.; Thonig, R. Status of Concentrated Solar Power Plants Installed Worldwide: Past and Present Data. Clean. Technol. 2024, 6, 365–378. [Google Scholar] [CrossRef]
- Hardt, M.; Martínez, D.; González, A.; Garrido, C.; Aladren, S.; Villa, J.R.; Saenz, J. Hector—Heliostat Cleaning Team-Oriented Robot. In Proceedings of the Solar-PACES 2011 Conference, Granada, Spain, 20–23 September 2011. [Google Scholar]
- Felsch, T.; Strauss, G.; Perez, C.; Rego, J.; Maurtua, I.; Susperregi, L.; Rodríguez, J. Robotized Inspection of Vertical Structures of a Solar Power Plant Using NDT Techniques. Robotics 2015, 4, 103–119. [Google Scholar] [CrossRef]
- Bouaddi, S.; Fernández-García, A.; Sansom, C.; Sarasua, J.A.; Wolfertstetter, F.; Bouzekri, H.; Sutter, F.; Azpitarte, I. A Review of Conventional and Innovative- Sustainable Methods for Cleaning Reflectors in Concentrating Solar Power Plants. Sustainability 2018, 10, 3937. [Google Scholar] [CrossRef]
- Vicente Peña, C.J.; Massabe Muñoz, F.; Villa Navarro, J.R.; Garrido Ortiz, S. Cleaning System for Cleaning Parabolic Trough Collector Plants and Cleaning Method Using Said System. Patent WO 2012/126559 A2, 27 September 2012. [Google Scholar]
- PARIS “Buffs up” Solar Fields. Available online: https://www.renewableenergymagazine.com/solar_thermal_electric/paris-buffs-up-solar-fields (accessed on 21 June 2024).
- Pardell, R. Agcfds: Automated Glass Cleaning Flying Drone System. U.S. Patent Appl. 15/301,516, 27 July 2017. [Google Scholar]
- Azouzoute, A.; Zitouni, H.; El Ydrissi, M.; Hajjaj, C.; Garoum, M.; Bennouna, E.G.; Ghennioui, A. Developing a Cleaning Strategy for Hybrid Solar Plants PV/CSP: Case Study for Semi-Arid Climate. Energy 2021, 228, 120565. [Google Scholar] [CrossRef]
- Cleaning Robot Soltibot® Successfully Tested on Linear Fresnel Collectors. Available online: https://cordis.europa.eu/article/id/124143-cleaning-robot-soltibot-successfully-tested-on-linear-fresnel-collectors (accessed on 21 June 2024).
- Milidonis, K.; Eliades, A.; Grigoriev, V.; Blanco, M.J. Unmanned Aerial Vehicles (UAVs) in the Planning, Operation and Maintenance of Concentrating Solar Thermal Systems: A Review. Sol. Energy 2023, 254, 182–194. [Google Scholar] [CrossRef]
- Tian, M.; Desai, N.; Bai, J.; Brost, R.; Small, D.; Novick, D.; Yellowhair, J.; Rafique, M.Z.E.; Pisharam, V.; Yao, Y. Toward Autonomous Field Inspection of CSP Collectors with a Polarimetric Imaging Drone. In Proceedings of the SolarPACES Conference Proceedings, Sydney, Australia, 10–13 October 2023; Volume 1. [Google Scholar] [CrossRef]
- Coventry, J.; Asselineau, C.-A.; Salahat, E.; Raman, M.A.; Mahony, R. A Robotic Vision System for Inspection of Soiling at CSP Plants. In Proceedings of the SOLARPACES 2011, Daegu, Republic of Korea, 1–4 October 2019; p. 100001. [Google Scholar]
- EU—Inship Project DEliverable 3.4 Survey of Existing Automated Mirror Cleaning Technologies 2017. Ref. Ares(2016)6703785—30/11/2016. Available online: https://ec.europa.eu/research/participants/documents/downloadPublic?documentIds=080166e5b6442653&appId=PPGMS (accessed on 10 September 2024).
- SUNCNIM|Suncnim. Available online: https://www.suncnim.com/en (accessed on 21 June 2024).
- Home—DURABLE. Available online: https://www.durableproject.eu/ (accessed on 21 June 2024).
- Solar Thermal Technology|Heliogen. Available online: https://www.heliogen.com/Technology/#autonomy-and-Robotics (accessed on 21 June 2024).
- Heliogen Demonstrates AI-Powered Autonomous Robot, ICARUS. Available online: https://www.heliogen.com/press-releases/heliogen-demonstrates-ai-powered-autonomous-robot-icarus-designed-to-lower-installation-and-maintenance-costs-of-full-scale-concentrated-solar-plants/ (accessed on 21 June 2024).
- Mitchell, R.A.; Zhu, G. A Non-Intrusive Optical (NIO) Approach to Characterize Heliostats in Utility-Scale Power Tower Plants: Methodology and in-Situ Validation. Solar Energy 2020, 209, 431–445. [Google Scholar] [CrossRef]
- Amin, A.; Wang, X.; Alroichdi, A.; Ibrahim, A. Designing and Manufacturing a Robot for Dry-Cleaning PV Solar Panels. Int. J. Energy Res. 2023, 2023, 7231554. [Google Scholar] [CrossRef]
- Megantoro, P.; Abror, A.; Syahbani, M.A.; Anugrah, A.W.; Perkasa, S.D.; Setiadi, H.; Awalin, L.J.; Vigneshwaran, P. Autonomous and Smart Cleaning Mobile Robot System to Improve the Maintenance Efficiency of Solar Photovoltaic Array. Bull. EEI 2023, 12, 3288–3297. [Google Scholar] [CrossRef]
- Antonelli, M.G.; Beomonte Zobel, P.; De Marcellis, A.; Palange, E. Autonomous Robot for Cleaning Photovoltaic Panels in Desert Zones. Mechatronics 2020, 68, 102372. [Google Scholar] [CrossRef]
- Cai, S.; Bao, G.; Ma, X.; Wu, W.; Bian, G.-B.; Rodrigues, J.J.P.C.; De Albuquerque, V.H.C. Parameters Optimization of the Dust Absorbing Structure for Photovoltaic Panel Cleaning Robot Based on Orthogonal Experiment Method. J. Clean. Prod. 2019, 217, 724–731. [Google Scholar] [CrossRef]
- Parrott, B.; Carrasco Zanini, P.; Shehri, A.; Kotsovos, K.; Gereige, I. Automated, Robotic Dry-Cleaning of Solar Panels in Thuwal, Saudi Arabia Using a Silicone Rubber Brush. Sol. Energy 2018, 171, 526–533. [Google Scholar] [CrossRef]
- Fan, S.; Liang, W.; Wang, G.; Zhang, Y.; Cao, S. A Novel Water-Free Cleaning Robot for Dust Removal from Distributed Photovoltaic (PV) in Water-Scarce Areas. Sol. Energy 2022, 241, 553–563. [Google Scholar] [CrossRef]
- Muhammed, S.; Laheb, T.; Ma’ad, H.; Maaroof, O.W. “UTU” Compact Solar Panel Cleaning Robot. Int. J. Adv. Nat. Sci. Eng. Res. 2023, 7, 217–226. [Google Scholar]
- Ölmez, B.B.; Ergezer, Ö.; Güğül, G.N. Autonomous Solar Panel Cleaning Robot with Rubber Wheeled and Air-Absorbing Motor. Int. J. Energy Appl. Technol. 2021, 8, 182–187. [Google Scholar] [CrossRef]
- Velasco-Sánchez, E.; Recalde, L.F.; Guevara, B.S.; Varela-Aldás, J.; Candelas, F.A.; Puente, S.T.; Gandolfo, D.C. Visual Servoing NMPC Applied to UAVs for Photovoltaic Array Inspection. IEEE Robot. Autom. Lett. 2024, 9, 2766–2773. [Google Scholar] [CrossRef]
- Rodriguez-Vazquez, J.; Prieto-Centeno, I.; Fernandez-Cortizas, M.; Perez-Saura, D.; Molina, M.; Campoy, P. Real-Time Object Detection for Autonomous Solar Farm Inspection via UAVs. Sensors 2024, 24, 777. [Google Scholar] [CrossRef]
- Jeffrey Kuo, C.-F.; Chen, S.-H.; Huang, C.-Y. Automatic Detection, Classification and Localization of Defects in Large Photovoltaic Plants Using Unmanned Aerial Vehicles (UAV) Based Infrared (IR) and RGB Imaging. Energy Convers. Manag. 2023, 276, 116495. [Google Scholar] [CrossRef]
- Al-Gawda, M.G.; Lau, C.Y.; Lai, N.S. Autonomous Uav Inspection System For Preventive Maintenance Of Solar Farms. J. Eng. Sci. Technol. 2022, 132–156. [Google Scholar]
- Nabti, M.; Bybi, A.; Chater, E.A.; Garoum, M. Machine Learning for Predictive Maintenance of Photovoltaic Panels: Cleaning Process Application. E3S Web Conf. 2022, 336, 00021. [Google Scholar] [CrossRef]
- Tsenis, T.; Tromaras, A.; Kappatos, V. NDE Using Quadruped Robotic Platform for Renewable Energy Producing Infrastructures. In Proceedings of the 2024 IEEE 8th Energy Conference ENERGYCON, Doha, Qatar, 4 March 2024; pp. 1–6. [Google Scholar]
- Le, N.T.; Nguyen, M.D.; Phan, T.D.; Truong, C.T.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Development of a Multi-Suspension Unit for Solar Cleaning Robots to Mitigate Vibration Impact on Photovoltaic Panels. Appl. Sci. 2023, 13, 12104. [Google Scholar] [CrossRef]
- Chailoet, K.; Pengwang, E. Assembly of Modular Robot for Cleaning Various Length of Solar Panels. IOP Conf. Ser. Mater. Sci. Eng. 2019, 639, 012014. [Google Scholar] [CrossRef]
- Akyazı, Ö.; Şahin, E.; Özsoy, T.; Algül, M. A Solar Panel Cleaning Robot Design and Application. Eur. J. Sci. Technol. 2019, 343–348. [Google Scholar] [CrossRef]
- Aravind, G.; Vasan, G.; Kumar, T.S.B.G.; Balaji, R.N.; Ilango, G.S. A Control Strategy for an Autonomous Robotic Vacuum Cleaner for Solar Panels. In Proceedings of the IEEE 2014 Texas Instruments India Educators’ Conference (TIIEC), Bangalore, India, 4–5 April 2014; pp. 53–61. [Google Scholar]
- Ghodki, M.K. An Infrared Based Dust Mitigation System Operated by the Robotic Arm for Performance Improvement of the Solar Panel. Sol. Energy 2022, 244, 343–361. [Google Scholar] [CrossRef]
- Yan, S.; Jian, Y.; Xu, L.J. Research on Design of Intelligent Cleaning Robot for Solar Panel. In Proceedings of the the 20th International Conference on Electronic Business, Hong Kong, China, 5 December 2020. [Google Scholar]
- GWEC Global Wind Report. Available online: https://gwec.net/wp-content/uploads/2021/03/GWEC-Global-Wind-Report-2021.pdf (accessed on 10 June 2024).
- Bernardini, S.; Jovan, F.; Jiang, Z.; Watson, S.; Weightman, A.; Moradi, P.; Richardson, T.; Sadeghian, R.; Sareh, S. A Multi-Robot Platform for the Autonomous Operation and Maintenance of Offshore Wind Farms. In Proceedings of the 19th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2020), Auckland, New Zealand, 9 May 2020. [Google Scholar]
- Franko, J.; Du, S.; Kallweit, S.; Duelberg, E.; Engemann, H. Design of a Multi-Robot System for Wind Turbine Maintenance. Energies 2020, 13, 2552. [Google Scholar] [CrossRef]
- Kanellakis, C.; Fresk, E.; Mansouri, S.S.; Kominiak, D.; Nikolakopoulos, G. Towards Visual Inspection of Wind Turbines: A Case of Visual Data Acquisition Using Autonomous Aerial Robots. IEEE Access 2020, 8, 181650–181661. [Google Scholar] [CrossRef]
- Li, Z.; Tokhi, M.O.; Zhao, Z.; Zheng, H. A Compact Laser Shearography System for On-Site Robotic Inspection of Wind Turbine Blades. JAIT 2021. [Google Scholar] [CrossRef]
- Engemann, H.; Cönen, P.; Dawar, H.; Du, S.; Kallweit, S. A Robot-Assisted Large-Scale Inspection of Wind Turbine Blades in Manufacturing Using an Autonomous Mobile Manipulator. Appl. Sci. 2021, 11, 9271. [Google Scholar] [CrossRef]
- Liu, J.-H.; Padrigalan, K. Design and Development of a Climbing Robot for Wind Turbine Maintenance. Appl. Sci. 2021, 11, 2328. [Google Scholar] [CrossRef]
- Jiang, Z.; Jovan, F.; Moradi, P.; Richardson, T.; Bernardini, S.; Watson, S.; Weightman, A.; Hine, D. A Multirobot System for Autonomous Deployment and Recovery of a Blade Crawler for Operations and Maintenance of Offshore Wind Turbine Blades. J. Field Robot. 2023, 40, 73–93. [Google Scholar] [CrossRef]
- Yang, P.; Zhang, M.; Sun, L.; Li, X. Design and Control of a Crawler-Type Wall-Climbing Robot System for Measuring Paint Film Thickness of Offshore Wind Turbine Tower. J. Intell. Robot. Syst. 2022, 106, 50. [Google Scholar] [CrossRef]
- Malik, A.A. Development of a Mobile Robot Assistant for Wind Turbines Manufacturing. arXiv 2022, arXiv:2208.03584. Available online: http://arxiv.org/abs/2208.03584 (accessed on 10 September 2024).
- Liu, Y.; Hajj, M.; Bao, Y. Review of Robot-Based Damage Assessment for Offshore Wind Turbines. Renew. Sustain. Energy Rev. 2022, 158, 112187. [Google Scholar] [CrossRef]
- Cieslak, C.; Shah, A.; Clark, B.; Childs, P. Wind-Turbine Inspection, Maintenance and Repair Robotic System. In Proceedings of the Volume 14: Wind Energy, Boston, MA, USA, 26 June 2023; American Society of Mechanical Engineers; p. V014T37A004. Available online: https://asmedigitalcollection.asme.org/GT/proceedings/GT2023/87127/V014T37A004/1168596 (accessed on 10 September 2024).
- Zhang, H.; Li, J.; Kang, F.; Zhang, J. Monitoring and Evaluation of the Repair Quality of Concrete Cracks Using Piezoelectric Smart Aggregates. Constr. Build. Mater. 2022, 317, 125775. [Google Scholar] [CrossRef]
- Erol, S.; Erol, B.; Ayan, T. A General Review Of The Deformation Monitoring Techniques And A Case Study: Analysing Deformations Using Gps/Levelling. In Proceedings of the XXth ISPRS Congress Technical Commission VII, Istanbul, Turkey, 12 July 2004; pp. 622–627. [Google Scholar]
- Hong, K.; Wang, H.; Yuan, B.; Wang, T. Multiple Defects Inspection of Dam Spillway Surface Using Deep Learning and 3D Reconstruction Techniques. Buildings 2023, 13, 285. [Google Scholar] [CrossRef]
- Bigman, D.P. Evaluating the Feasibility of Robotic Crawler Deployed Ground Penetrating Radar to Assess Repairs of a Concrete Hydroelectric Dam Spillway in Alabama, USA. Water 2023, 15, 1858. [Google Scholar] [CrossRef]
- Pinto, M.F.; Honorio, L.M.; Melo, A.; Marcato, A.L.M. A Robotic Cognitive Architecture for Slope and Dam Inspections. Sensors 2020, 20, 4579. [Google Scholar] [CrossRef]
- Patil, S.; Jacob, A.A.; Upadhyay, V.; Jhunjhunwala, T.; Balasubramanian, K. Robotic Ultrasonic Pulse Velocimetry for Submerged Concrete Assets. J. Non Destr. Test. Eval. 2023, 20, 58–66. [Google Scholar]
- Sakagami, N.; Yumoto, Y.; Takebayashi, T.; Kawamura, S. Development of Dam Inspection Robot with Negative Pressure Effect Plate. J. Field Robot. 2019, 36, 1422–1435. [Google Scholar] [CrossRef]
- Kohut, P.; Giergiel, M.; Cieslak, P.; Ciszewski, M.; Buratowski, T. Underwater Robotic System for Reservoir Maintenance. J. Vibroeng. 2016, 18, 3757–3767. [Google Scholar] [CrossRef]
- Li, Y.; Bao, T.; Xu, B.; Shu, X.; Zhou, Y.; Du, Y.; Wang, R.; Zhang, K. A Deep Residual Neural Network Framework with Transfer Learning for Concrete Dams Patch-Level Crack Classification and Weakly-Supervised Localization. Measurement 2022, 188, 110641. [Google Scholar] [CrossRef]
- Li, X.; Sun, H.; Song, T.; Zhang, T.; Meng, Q. A Method of Underwater Bridge Structure Damage Detection Method Based on a Lightweight Deep Convolutional Network. IET Image Process. 2022, 16, 3893–3909. [Google Scholar] [CrossRef]
- Chen, D.; Huang, B.; Kang, F. A Review of Detection Technologies for Underwater Cracks on Concrete Dam Surfaces. Appl. Sci. 2023, 13, 3564. [Google Scholar] [CrossRef]
- Qi, Z.; Liu, D.; Zhang, J.; Chen, J. Micro-Concrete Crack Detection of Underwater Structures Based on Convolutional Neural Network. Mach. Vis. Vision. Appl. 2022, 33, 74. [Google Scholar] [CrossRef]
- Shi, P.; Fan, X.; Ni, J.; Wang, G. A Detection and Classification Approach for Underwater Dam Cracks. Struct. Health Monit. 2016, 15, 541–554. [Google Scholar] [CrossRef]
- Hazel, B.; Côté, J.; Laroche, Y.; Mongenot, P. Field Repair and Construction of Large Hydropower Equipment with a Portable Robot. J. Field Robot. 2012, 29, 102–122. [Google Scholar] [CrossRef]
- Thuot, D.; Liu, Z.; Champliaud, H.; Beaudry, J.; Richard, P.-L.; Blain, M. Remote Robotic Underwater Grinding System and Modeling for Rectification of Hydroelectric Structures. Robot. Comput. -Integr. Manuf. 2013, 29, 86–95. [Google Scholar] [CrossRef]
- Ekren, N.; Karagöz, Z.; Şahin, M. A Review of Line Suspended Inspection Robots for Power Transmission Lines. J. Electr. Eng. Technol. 2024, 19, 2549–2583. [Google Scholar] [CrossRef]
- Ahmed, F.; Mohanta, J.C.; Keshari, A. Power Transmission Line Inspections: Methods, Challenges, Current Status and Usage of Unmanned Aerial Systems. J. Intell. Robot. Syst. 2024, 110, 54. [Google Scholar] [CrossRef]
- Jing, Y.Z.; Liao, H.J.; Zhang, C.H.; Peng, T.; Liao, Z.Z.; Liu, F. Design of auto detection system for high-voltage insulator inspection robot. In Proceedings of the 2017 International Conference on Robotics and Automation Sciences (ICRAS), Hong Kong, China, 26–29 August 2017. [Google Scholar] [CrossRef]
- Wale, P.B.; Kamal, S.K. Maintenance of transmission line by using robot. In Proceedings of the 2016 International Uonference on Uutomatic Uontrol and Uynamic Uptimization Uechniques (ICACDOT), Pune, India, 9–10 September 2016. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Y.; Rui, X. Mechanism and characteristic of rain-induced vibration on high-voltage transmission line. J. Mech. Sci. Technol. 2012, 26, 2505–2510. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Y.; Ma, Z. Investigation on aerodynamic instability of high-voltage transmission lines under rain-wind condition. J. Mech. Sci. Technol. 2015, 29, 131–139. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, Y. Modeling and mechanism of rain-wind induced vibration of bundled conductors. Shock. Vib. 2016, 2016, 1038150. [Google Scholar] [CrossRef]
- Wu, G.; Xu, X.; Xiao, H.; Dai, J.; Xiao, X.; Huang, Z.; Ruan, L. A novel self-navigated inspection robot along high-voltage power transmission line and its application. In Proceedings of the Intelligent Robotics and Applications First International Conference (ICIRA 2008), Wuhan, China, 15–17 October 2008. [Google Scholar] [CrossRef]
- Wu, G.; Cao, H.; Xu, X.; Xiao, H.; Li, S.; Xu, Q.; Liu, B.; Wang, Q.; Wang, Z.; Ma, Y. Design and application of inspection system in a self-governing mobile robot system for high voltage transmission line inspection. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 27–31 March 2009. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, H.; Fang, L.; Zhao, M.; Zhou, J. Algorithm research of inspection robot for searching for pose of overhead ground wires. In Proceedings of the 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006. [Google Scholar] [CrossRef]
- Toussaint, K.; Pouliot, N.; Montambault, S. Transmission line maintenance robots capable of crossing obstacles: State-of-the-art review and challenges ahead. J. Field Robot. 2009, 26, 477–499. [Google Scholar] [CrossRef]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- CIGRE. The use of robotics in assessment and maintenance of overhead lines. In Proceedings of the Technical Brochure of 13th annual CIGRE Canada Conference on Power Systems, Calgary, AB, Canada, 15–18 October 2018. [Google Scholar]
- Nayyerloo, M.; Chen, X.; Wang, W.; Chase, J. Cable-climbing robots for power transmission lines inspection. In Mobile Robots—State of the Art in Land, Sea, Air, and Collaborative Missions; Chen, X.Q., Chen, Y.Q., Chase, J.G., Eds.; IntechOpen: London, UK, 2009; Chapter 4; pp. 63–84. [Google Scholar] [CrossRef]
- Elizondo, D.; Gentile, T.; Candia, H.; Bell, G. Overview of robotic applications for energized transmission line work—Technologies, field projects and future developments. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010. [Google Scholar] [CrossRef]
- Gonçalves, R.S.; Carvalho, J.C.M. Review and latest trends in mobile robots used on power transmission lines. Int. J. Adv. Robot. Syst. 2013, 10, 1–14. [Google Scholar] [CrossRef]
- Pagnano, A.; Höpf, M.; Teti, R. A roadmap for automated power line inspection. Maintenance and repair. Procedia CIRP 2013, 12, 234–239. [Google Scholar] [CrossRef]
- Seok, K.H.; Kim, Y.S. A state of the art of power transmission line maintenance robots. J. Electr. Eng. Technol. 2016, 11, 1412–1422. [Google Scholar] [CrossRef]
- Li, L.; Li, N.; Li, Y.; Zhang, B.; Zhao, J.; Zhang, C.; Dai, Z. A state-of-the-art survey of the robotics applied for the power industry in China. In Proceedings of the 2016 4th International Conference on Applied Robotics for the Power Industry (CARPI), Jinan, China, 11–13 October 2016. [Google Scholar] [CrossRef]
- Phillips, A.; Engdahl, E.; McGuire, D.; Major, M.; Bartlett, G. Autonomous overhead transmission line inspection robot (TI) development and demonstration. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012. [Google Scholar] [CrossRef]
- Zheng, L.; Yi, R. Obstacle negotiation control for a mobile robot suspended on overhead ground wires by optoelectronic sensors. In Proceedings of the 2009 International Conference on Optical Instruments and Technology: Advanced Sensor Technologies and Applications, Shanghai, China, 19–22 October 2009. [Google Scholar] [CrossRef]
- Guanghong, T.; Lijin, F. A multi-unit serial inspection robot for power transmission lines. Ind. Robot. 2019, 46, 223–234. [Google Scholar] [CrossRef]
- Debenest, P.; Guarnieri, M.; Takita, K.; Fukushima, E.F.; Hirose, S.; Tamura, K.; Kimura, A.; Kubokawa, H.; Iwama, N.; Shiga, F.; et al. Toward a Practical Robot for Inspection of High-Voltage Lines. In Field and Service Robotics; Springer Tracts in Advanced Robotics; Howard, A., Iagnemma, K., Kelly, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 62, pp. 45–55. [Google Scholar] [CrossRef]
- Chen, Y.; Fang, Z.; Liu, S.; Wang, Y.; Zhong, C.; Cai, C.; Zhang, Y.; Wei, Y.; Wang, Z. A soft-robotic gripper for ultra-high-voltage transmission line operations. In Proceedings of the 2020 IEEE 4th Conference on Energy Internet and Energy System Integration (EI2), Wuhan, China, 30 October–1 November 2020; Available online: https://ieeexplore.ieee.org/document/9347270 (accessed on 10 September 2024).
- Nie, Y.; Jiao, C.; Fan, Y. Active shielding design of patrol robot wireless charging system. In Proceedings of the 2019 IEEE 3rd International Electrical and Energy Conference (CIEEC), Beijing, China, 7–9 September 2019. [Google Scholar] [CrossRef]
- Sawada, J.; Kusumoto, K.; Maikawa, Y.; Munakata, T.; Ishikawa, Y. A mobile robot for inspection of power transmission lines. IEEE Trans. Power Deliv. 1991, 6, 309–315. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, H.; Fang, L.; Zhao, M.; Zhou, J. Dual arms running control method of inspection robot based on obliquitous sensor. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006. [Google Scholar] [CrossRef]
- Dian, S.; Wen, X.; Dong, H.; Weng, T. Development of a self-balance dual-arm robot for inspection of high-voltage power transmission lines. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012. [Google Scholar] [CrossRef]
- Katrašnik, J.; Pernuš, F.; Likar, B. A climbing-flying robot for power line inspection. In Climbing and Walking Robots; Miripour, B., Ed.; IntechOpen: London, UK, 2010; Chapter 6; pp. 95–110. [Google Scholar] [CrossRef]
- Chang, W.; Yang, G.; Yu, J.; Liang, Z.; Cheng, L.; Zhou, C. Development of a power line inspection robot with hybrid operation modes. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 24–28 September 2017. [Google Scholar] [CrossRef]
- Mirallès, F.; Hamelin, P.; Lambert, G.; Lavoie, S.; Pouliot, N.; Montfrond, M.; Montambault, S. LineDrone technology: Landing an unmanned aerial vehicle on a power line. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. [Google Scholar] [CrossRef]
- Iftikhar, H.; Sarquis, E.; Branco, P.J.C. Why Can Simple Operation and Maintenance (O&M) Practices in Large-Scale Grid-Connected PV Power Plants Play a Key Role in Improving Its Energy Output? Energies 2021, 14, 3798. [Google Scholar] [CrossRef]
- Keisang, K.; Bader, T.; Samikannu, R. Review of operation and maintenance methodologies for solar photovoltaic microgrids. Front. Energy Res. 2021, 9, 730230. [Google Scholar] [CrossRef]
- Spencer, B.F.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222, ISSN 2095-8099. [Google Scholar] [CrossRef]
- Zou, J.T.; Rajveer, G.V. Drone-based solar panel inspection with 5G and AI Technologies. In Proceedings of the 2022 8th International Conference on Applied System Innovation (ICASI), Nantou, Taiwan, 22–23 April 2022; pp. 174–178. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the 28th International Conference on Neural Information Processing Systems, Montreal, Canada, 7–12 December 2015; Available online: https://papers.nips.cc/paper_files/paper/2015 (accessed on 18 July 2024).
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Proceedings of the Conference on Advances in Neural Information Processing Systems 29 (NIPS 2016), Barcelona, Spain, 5–10 December 2016; Available online: https://papers.nips.cc/paper_files/paper/2016 (accessed on 18 July 2024).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Uonference on Uomputer Uision and Uattern Uecognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the AAAI conference on artificial intelligence (AAAI-17), San Francisco, CA, USA, 4–9 February 2017; Available online: https://aaai.org/papers/11231-aaai-31-2017/ (accessed on 22 July 2024).
- Liu, Z.; Li, X.; Luo, P.; Loy, C.C.; Tang, X. Semantic image segmentation via deep parsing network. In Proceedings of the IEEE International conference on computer vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1377–1385. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE international conference on computer vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar] [CrossRef]
- Bhujade Rajeev, M.; Adithya, V.; Hrishikesh, S.; Balamurali, P. Detection of power-lines in complex natural surroundings. In Proceedings of the Second International Conference on Information Technology Convergence and Services (ITCSE 2013), Bangalore, India, 20–21 December 2013; Available online: https://airccj.org/CSCP/vol3/csit3910.pdf (accessed on 22 July 2024).
- Li, Z.; Liu, Y.; Hayward, R.; Zhang, J.; Cai, J. Knowledge-based power line detection for UAV surveillance and inspection systems. In Proceedings of the 2008 23rd International Conference Image and Vision Computing New Zealand, Christchurch, New Zealand, 26–28 November 2008; Available online: https://ieeexplore.ieee.org/document/4762118 (accessed on 10 September 2024).
- Peeters, C.; Guillaume, P.; Helsen, J. Vibration-based bearing fault detection for operations and maintenance cost reduction in wind energy. Renew. Energy 2018, 116, 74–87. [Google Scholar] [CrossRef]
- Huang, B.; Zhao, S.; Kang, F. Image-based automatic multiple-damage detection of concrete dams using region-based convolutional neural networks. J. Civil. Struct. Health Monit. 2023, 13, 413–429. [Google Scholar] [CrossRef]
- Li, L.; Zhang, H.; Pang, J.; Huang, J. Dam surface crack detection based on deep learning. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019; pp. 738–743. [Google Scholar]
- Osman, A.I.; Chen, L.; Yang, M.; Msigwa, G.; Farghali, M.; Fawzy, S.; Rooney, D.W.; Yap, P.S. Cost, environmental impact, and resilience of renewable energy under a changing climate: A review. Environ. Chem. Lett. 2023, 21, 741–764. [Google Scholar] [CrossRef]
- Zhao, S.Z.; Kang, F.; Li, J.J.; Ma, C.B. Structural health monitoring and inspection of dams based on UAV photogrammetry with image 3D reconstruction. Automat. Constr. 2021, 130, 103832. [Google Scholar] [CrossRef]
- De Vito, S.; Del Giudice, A.; Di Francia, G. Electric Transmission and Distribution Network Air Pollution. Sensors 2024, 24, 587. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. In Proceedings of the 31st International Conference on Neural Information Processing Systems (NIPS 17), Long Beach, California, USA, 4–9 December 2017; Available online: https://dl.acm.org/doi/10.5555/3295222.3295349 (accessed on 10 September 2024).
- Schonberger, J.L.; Frahm, J.M. Structure-from-Motion Revisited. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar] [CrossRef]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Available online: https://ieeexplore.ieee.org/document/1640800 (accessed on 10 September 2024).
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar] [CrossRef]
- Krizhevsky, A. Learning Multiple Layers of Features from Tiny Images. Technical Report TR-2009, University of Toronto. 2009. Available online: https://www.cs.toronto.edu/~kriz/learning-features-2009-TR.pdf (accessed on 19 July 2024).
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the 13th European Conference, Zurich, Switzerland, 6–12 September 2014. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Scharstein, D.; Szeliski, R. High-accuracy Stereo Depth Maps Using Structured Light. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Madison, WI, USA, 18–20 June 2003; Available online: https://ieeexplore.ieee.org/document/1211354 (accessed on 10 September 2024).
- Jensen, R.; Dahl, A.L.; Vogiatzis, G.; Tola, E.; Aanæs, H. Large Scale Multi-view Stereopsis Evaluation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Saxena, A.; Goebel, K.; Simon, D.; Eklund, N. Damage Propagation Modeling for Aircraft Engine Run-to-Failure Simulation. In Proceedings of the 1st International Conference on Prognostics and Health Management (PHM08), Denver, CO, USA, 6–9 October 2008. [Google Scholar] [CrossRef]
- Purohit, H.; Tanabe, R.; Ichige, T.; Endo, T.; Nikaido, Y.; Suefusa, K.; Kawaguchi, Y. MIMII Dataset: Sound Dataset for Malfunctioning Industrial Machine Investigation and Inspection. In Proceedings of the Detection and Classification of Acoustic Scenes and Events 2019 Workshop (DCASE2019), New York, NY, USA, 25–26 October 2019; Available online: https://zenodo.org/record/3384388 (accessed on 19 July 2024). [CrossRef]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed With Convolutional Neural Networks. IEEE Trans. Syst. Man. Cybern. Syst. 2020, 50, 1486–1498. [Google Scholar] [CrossRef]
- Tomaszewski, M.; Ruszczak, B.; Michalski, P. The collection of images of an insulator taken outdoors in varying lighting conditions with additional laser spots. Data Brief. 2018, 18, 765–768. [Google Scholar] [CrossRef]
- Bian, J.; Hui, X.; Zhao, X.; Tan, M. A monocular vision–based perception approach for unmanned aerial vehicle close proximity transmission tower inspection. Int. J. Adv. Robot. Syst. 2019, 16, 1729881418820227. [Google Scholar] [CrossRef]
- Yetgin, Ö.E.; Gerek, Ö.N.; Nezih, Ö. Ground truth of powerline dataset (infrared-ir and visible light-vl). Mendeley Data 2017, 8. [Google Scholar]
- Bradbury, K.; Saboo, R.; Johnson, T.L.; Malof, J.M.; Devarajan, A.; Zhang, W.; Collins, L.M.; Newell, R.G. Distributed Solar Photovoltaic Array Location and Extent Data Set for Remote Sensing Object Identification. Sci. Data 2016, 3, 160106. [Google Scholar] [CrossRef]
- DKASC; Alice Springs; DKA Solar Centre. Available online: http://dkasolarcentre.com.au/locations/alice-springs (accessed on 19 July 2024).
- ESOLMET-IER Instituto de Energías Renovables. Available online: http://esolmet.ier.unam.mx/Tipos_consulta.php (accessed on 19 July 2024).
- Sengupta, M.; Xie, Y.; Lopez., A.; Habte, A.; Maclaurin, G.; James, S. The national solar radiation data base (NSRDB). Renew. Sustain. Energy Rev. 2018, 89, 51–60. [Google Scholar] [CrossRef]
- Pierdicca, R.; Paolanti, M.; Felicetti, A.; Piccinini, F.; Zingaretti, P. Automatic Faults Detection of Photovoltaic Farms: SolAIr, a Deep Learning-Based System for Thermal Images. Energies 2020, 13, 6496. [Google Scholar] [CrossRef]
- The Photovoltaic Thermal Images Dataset. Available online: https://vrai.dii.univpm.it/content/photovoltaic-thermal-images-dataset (accessed on 19 July 2024).
- Jung, J.H.; Lim, D.G. Industrial robots, employment growth, and labor cost: A simultaneous equation analysis. Technol. Forecast. Soc. Chang. 2020, 159, 120202. [Google Scholar] [CrossRef]
- IEA. World Energy Employment 2022; IEA: Paris, France, 2022; Available online: https://www.iea.org/reports/world-energy-employment-2022 (accessed on 10 September 2024).







| Robotic Task | Concrete Surface Inspection | Concrete Interior Inspection | |||
|---|---|---|---|---|---|
| Sensors | Above Water Surface | Below Water Surface | Above Water Surface | Below Water Surface | |
| GPR | [82] | ||||
| UPV | [84] | ||||
| Optical camera | [81,83,87] | [85,86,88,89] | |||
| Type of Movement | 3D CAD Drawings | Computer Simulations | Laboratory Experiments | Field Testing |
|---|---|---|---|---|
| Multiple wires | 3 | 3 | ||
| Single wires | 5 | 3 | 19 | 6 |
| Ground wires | 1 | 5 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taraglio, S.; Chiesa, S.; De Vito, S.; Paoloni, M.; Piantadosi, G.; Zanela, A.; Di Francia, G. Robots for the Energy Transition: A Review. Processes 2024, 12, 1982. https://doi.org/10.3390/pr12091982
Taraglio S, Chiesa S, De Vito S, Paoloni M, Piantadosi G, Zanela A, Di Francia G. Robots for the Energy Transition: A Review. Processes. 2024; 12(9):1982. https://doi.org/10.3390/pr12091982
Chicago/Turabian StyleTaraglio, Sergio, Stefano Chiesa, Saverio De Vito, Marco Paoloni, Gabriele Piantadosi, Andrea Zanela, and Girolamo Di Francia. 2024. "Robots for the Energy Transition: A Review" Processes 12, no. 9: 1982. https://doi.org/10.3390/pr12091982
APA StyleTaraglio, S., Chiesa, S., De Vito, S., Paoloni, M., Piantadosi, G., Zanela, A., & Di Francia, G. (2024). Robots for the Energy Transition: A Review. Processes, 12(9), 1982. https://doi.org/10.3390/pr12091982