


Efficient Dual-Loop PFC for Challenging Dynamic Processes



Abstract
:1. Introduction
- (i)
- the use of constant input inevitably leads to ill-defined predictions in the long range; the decision making is, therefore, unreliable and prone to failure under the influence of external perturbations and/or constraints.
- (ii)
- controller tuning is no longer simple and straightforward; it is rather unsystematic with no clear linkage between the tuning parameters and the achieved performance.
- Pole Cancellation is more efficient in handling poorly damped (stable) dynamics than the other discussed techniques.
- For unstable processes, pre-compensation based on dominant first- or second-order models usually performs better than Pole Placement.
- Pre-stabilisation designs based on Pole Placement may over-actuate the controller, possibly leading to constraint violations and instability in practice, and therefore should be used with caution.
2. Technical Overview of Dual-Loop PFC
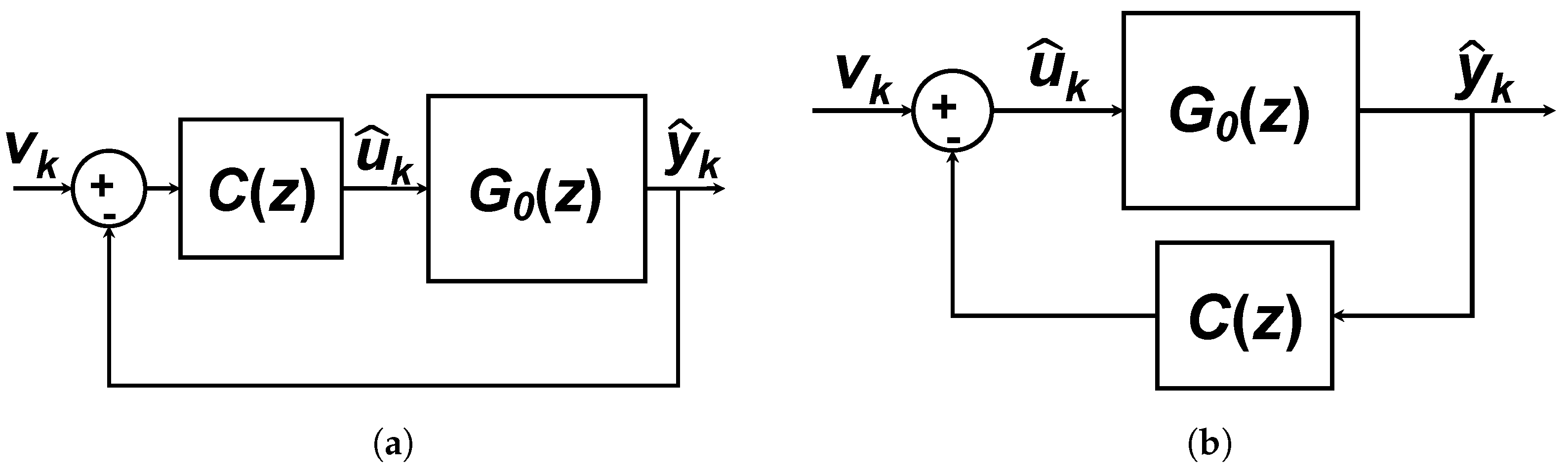
2.1. Pre-Compensating the Prediction Model
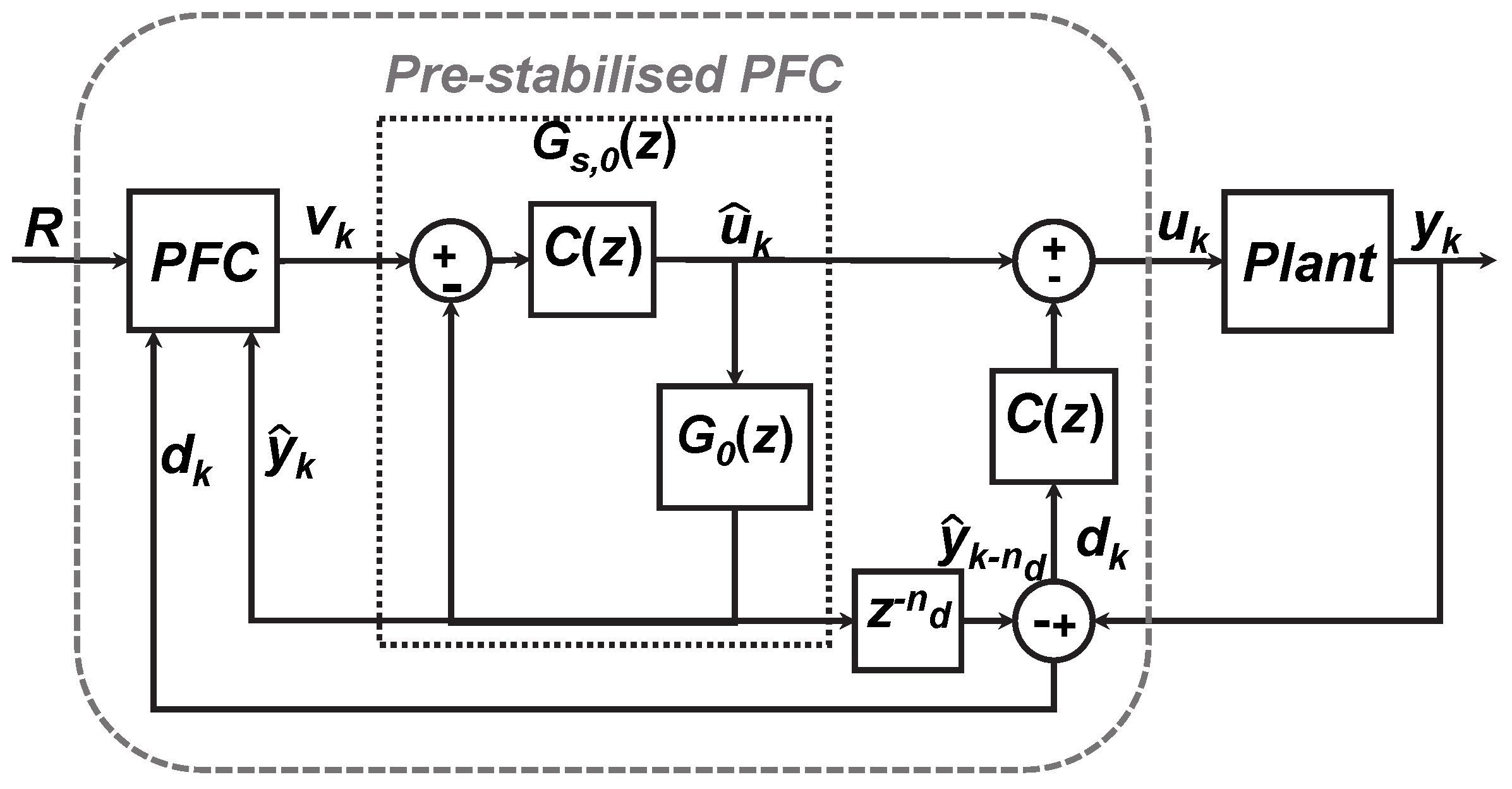
2.2. Establishing a Pre-Stabilised PFC Control Law
2.3. Computing the True Process Input
2.4. Constraint Handling with Pre-Stabilisation
2.5. Summary
3. Pre-Stabilised PFC and Relative Tuning
3.1. The Relative Tuning Proposal
- (i)
- The controller tuning simplifies to merely answering one trivial question, i.e., how much faster (or slower) one wishes the closed-loop system to respond as compared to the open-loop behaviour.
- (ii)
- Removing the explicit role of and implicit in conventional PFC laws [22] prevents the incorrect use of feedforward information in the control law, and consequently the inadvertent addition of undesirable lag in the closed-loop response.
3.2. The Relative PFC Control Law
3.3. Parameter Tuning in RPFC
- reduces the input activity, resulting in a slower closed-loop performance. For example, uses an input only half as active as the benchmark to produce a relatively slower response.
- is equivalent to the steady-state tuning.
- increases input activity with a faster performance. For example, uses an input twice as aggressive as the benchmark to produce a comparatively faster response.
3.4. Managing Constraints with Pre-Stabilised Relative PFC
3.5. Summary
4. Designing a Suitable Pre-Stabilising Compensator
4.1. Pre-Compensation of Unstable First-Order Dynamics
4.2. Pre-Stabilising Second-Order Dynamics via Root Locus
4.3. Pre-Compensation of Poorly Damped Systems via Pole Cancellation
4.4. Pre-Stabilisation via Pole Placement
- Proposal for Unstable Poles. With , design . In case an integrator factor is present, one may simply replace it with .
- Proposal for Complex Poles. With , place the pre-stabilised poles at the real part of the complex open-loop poles, i.e., . This will effectively filter out the undesirable oscillations but without changing the convergence speed.
4.5. Summary
5. Simulation Results and Discussion
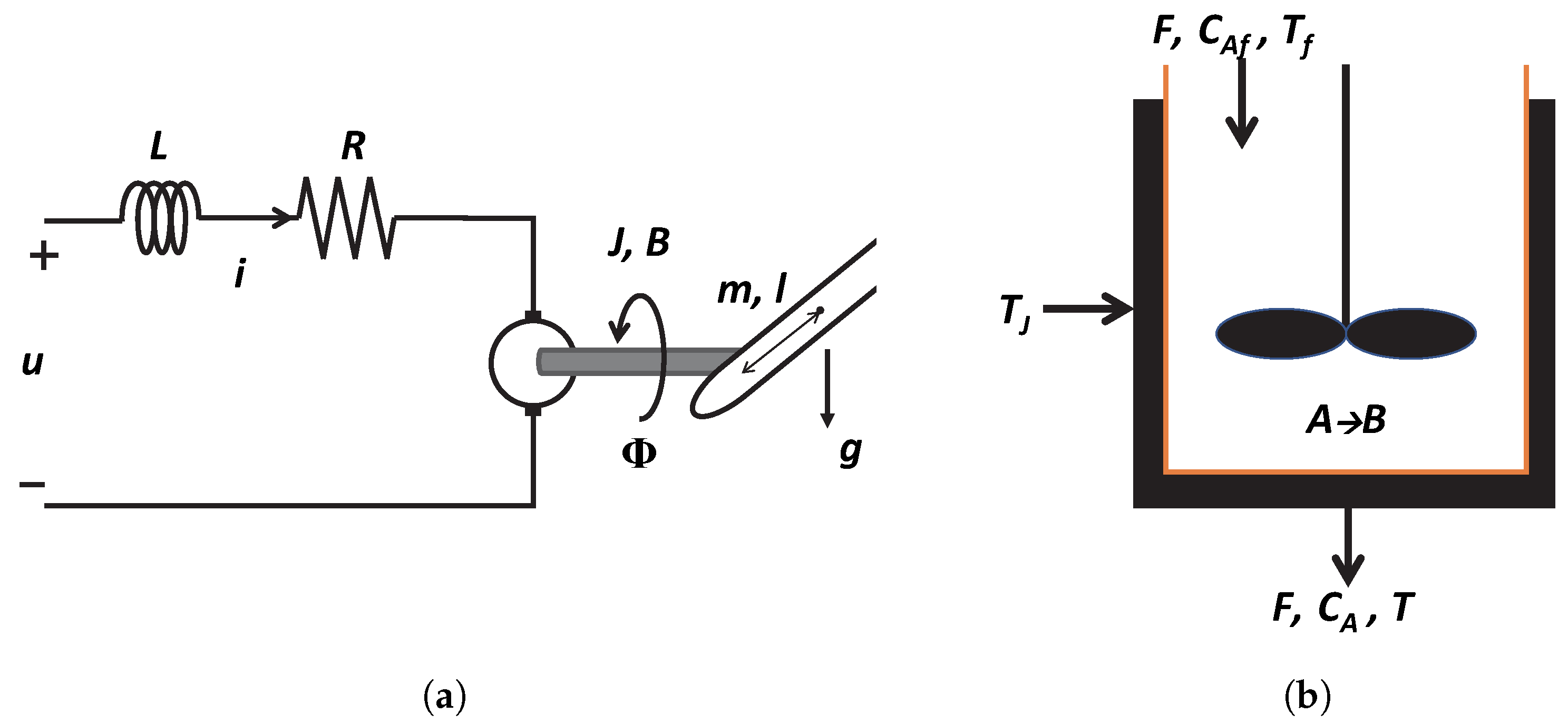
5.1. Description of Case Studies
5.2. Linearisation of Models
5.3. Pre-Stabilisation and Parameter Tuning
- , , poles at
- , , poles at
- , , pole at
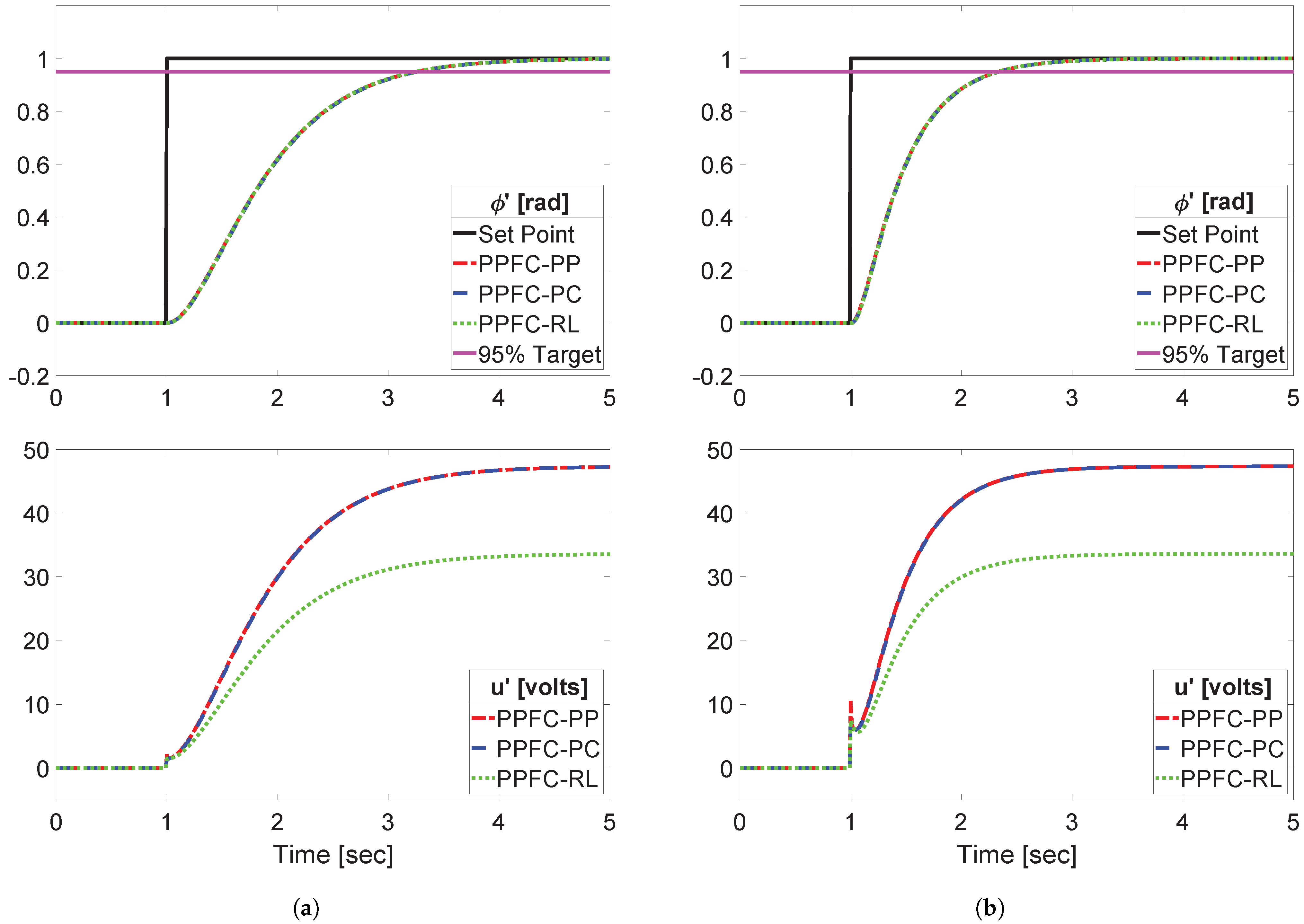
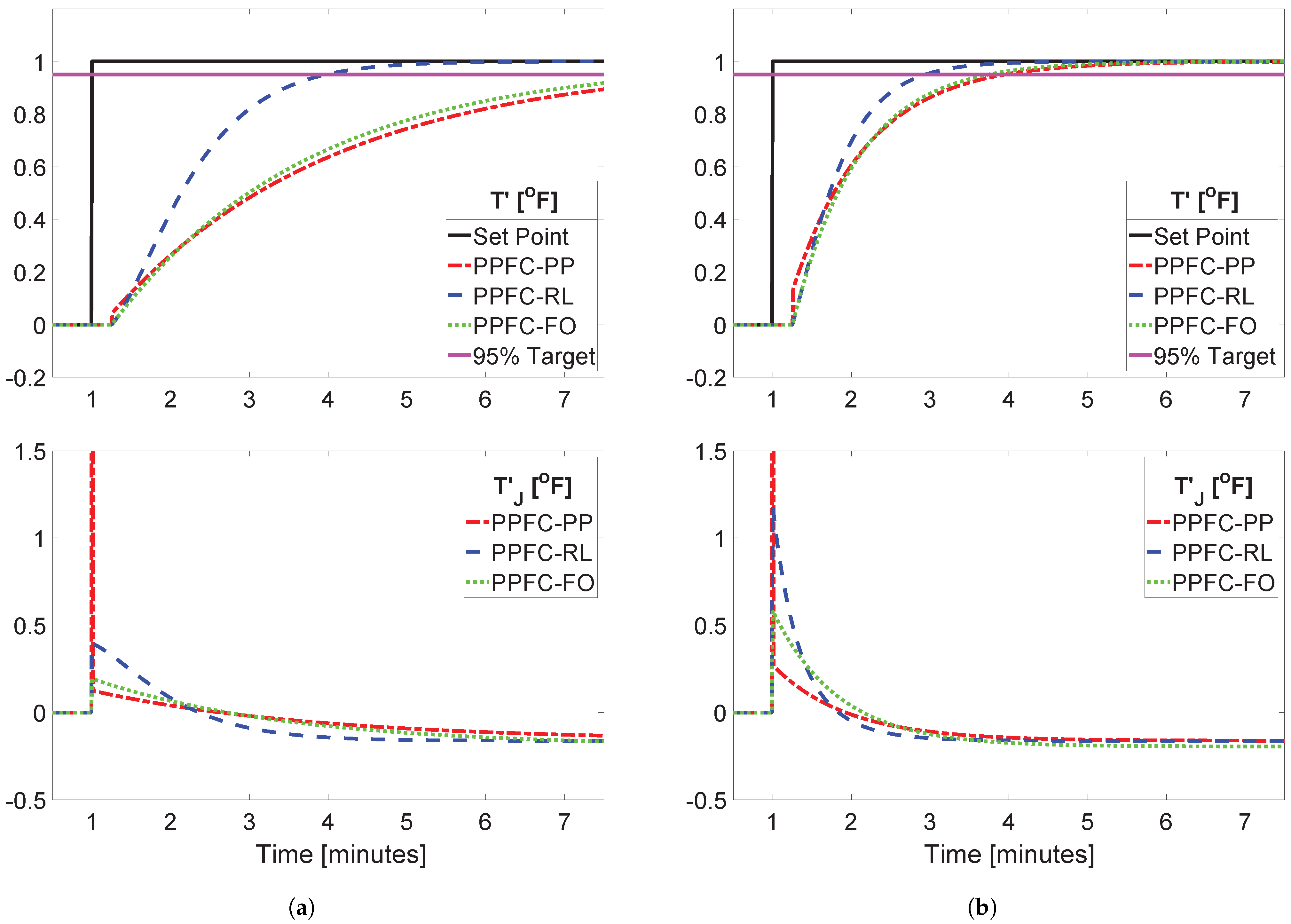
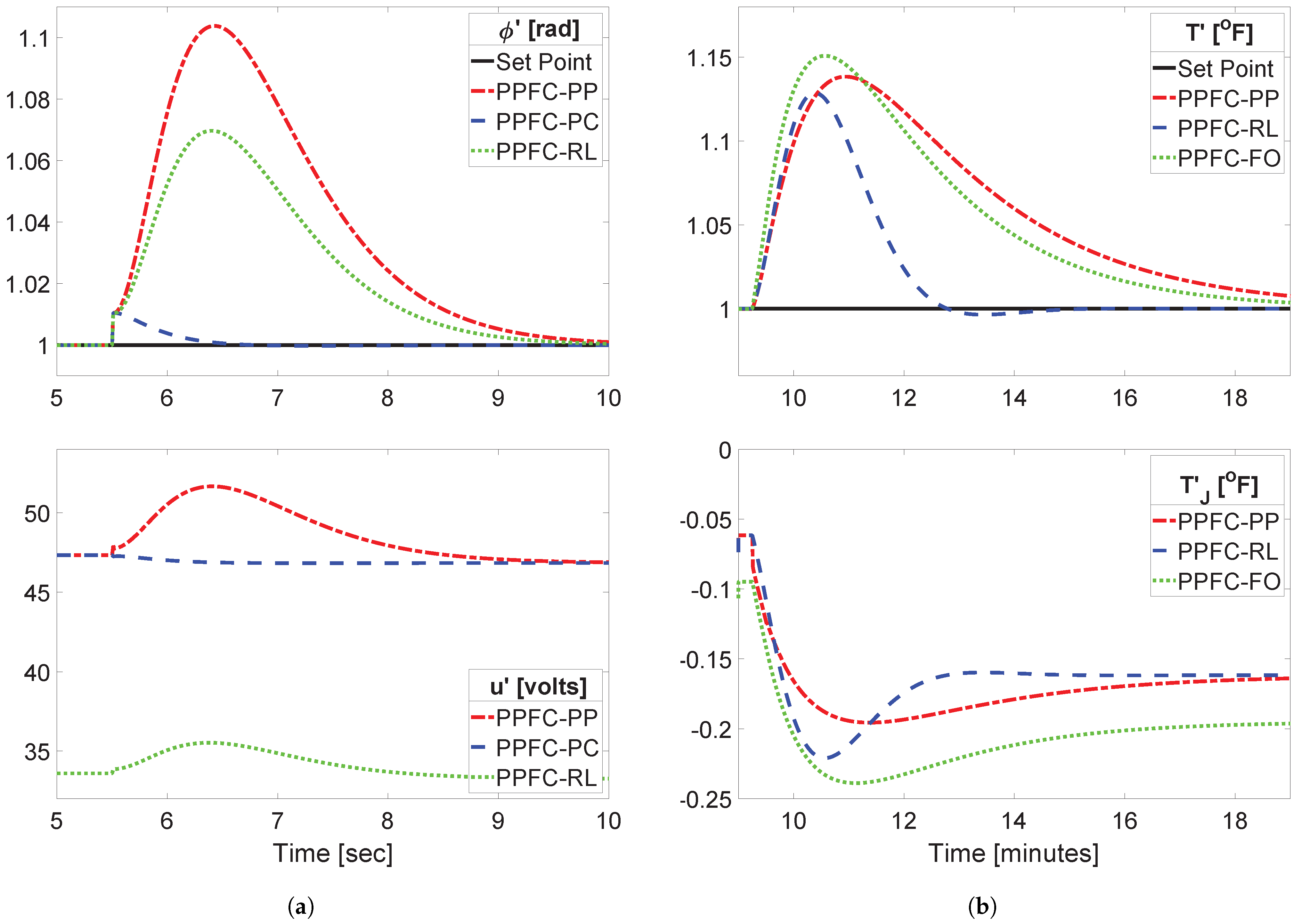
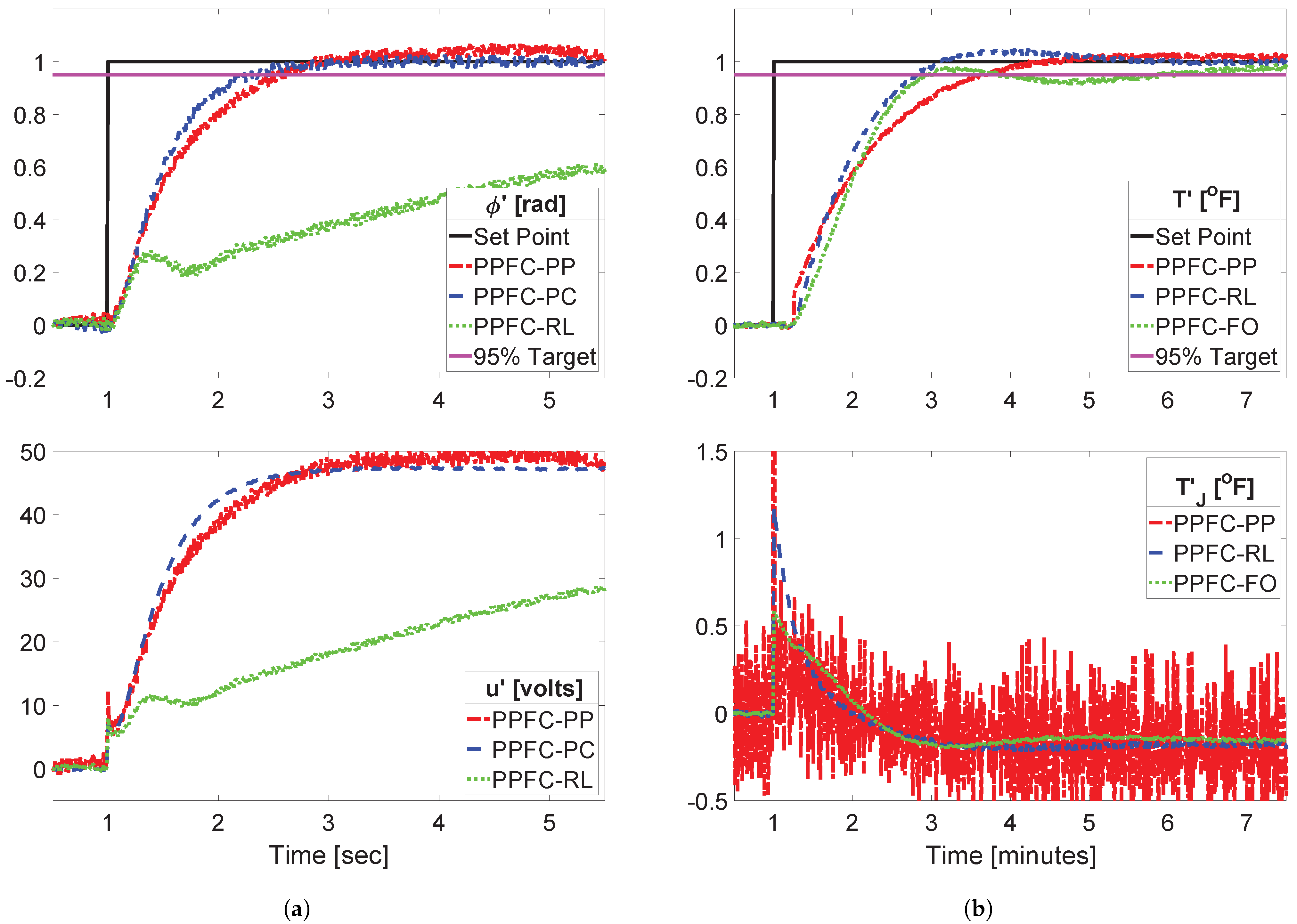
5.4. Comparison in Practical Scenarios
- Pole Cancellation is more efficient in handling poorly damped (stable) dynamics than the other discussed techniques.
- For unstable processes, pre-compensation based on dominant first- or second-order models usually outperforms Pole Placement.
- Pre-stabilisation based on Pole Placement often over-actuates the controller, possibly leading to constraint violations and instability in practice, and therefore should be used with caution.
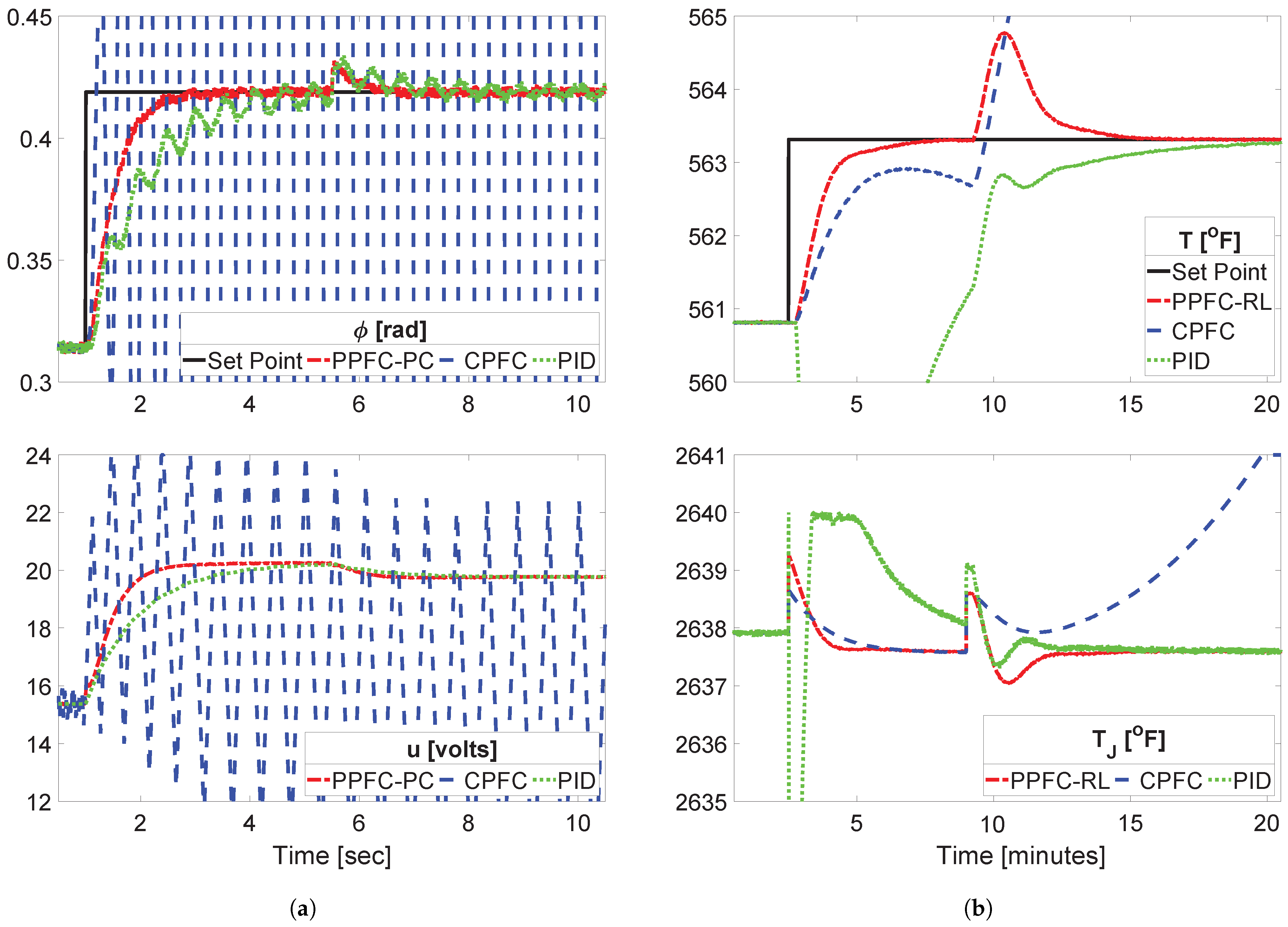
5.5. Analysis of Constrained Closed-Loop Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model predictive heuristic control. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Richalet, J.; O’Donovan, D. Predictive Functional Control: Principles and Industrial Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Richalet, J.; O’Donovan, D. Elementary predictive functional control: A tutorial. In Proceedings of the 2011 International Symposium on Advanced Control of Industrial Processes (ADCONIP), Hangzhou, China, 23–26 May 2011; pp. 306–313. [Google Scholar]
- Zhou, L.; Lin, J.; Sun, J.; Fu, H.; Wan, Q. Predictive Functional Control for Linear Motor Speed System Based on Repetitive Sliding Mode Observer. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 2633–2638. [Google Scholar] [CrossRef]
- Luo, Q.; Bai, J.; Wu, F. Improved Constrained Predictive Functional Control Using Extended Non-Minimal State Space Formulation for the Cement Production Process. Processes 2022, 10, 969. [Google Scholar] [CrossRef]
- Zainuddin, M.; Abdullah, M.; Ahmad, S.; Tofrowaih, K. Performance Comparison Between Predictive Functional Control and PID Algorithms for an Automobile Cruise Control System. Int. J. Automot. Mech. Eng. 2022, 19, 9460–9468. [Google Scholar] [CrossRef]
- Li, H.; Song, B.; Chen, T.; Xie, Y.; Zhou, X. Adaptive fuzzy PI controller for permanent magnet synchronous motor drive based on predictive functional control. J. Frankl. Inst. 2021, 358, 7333–7364. [Google Scholar] [CrossRef]
- Eduardo, F.; Camacho, C.B.A. Model Predictive Control; Springer: London, UK, 2007. [Google Scholar]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Köhler, J.; Müller, M.A.; Allgöwer, F. Analysis and design of model predictive control frameworks for dynamic operation—An overview. Annu. Rev. Control 2024, 57, 100929. [Google Scholar] [CrossRef]
- Nikolaou, M. Model Predictive Controllers: A Critical Synthesis of Theory and Industrial Needs. In Advances in Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2001; pp. 131–204. [Google Scholar] [CrossRef]
- Rossiter, J.A. A First Course in Predictive Control; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Rossiter, J.A.; Haber, R. The effect of coincidence horizon on predictive functional control. Processes 2015, 3, 25–45. [Google Scholar] [CrossRef]
- Rossiter, J.A. Input shaping for PFC: How and why? J. Control Decis. 2016, 3, 105–118. [Google Scholar] [CrossRef]
- Khadir, M.; Ringwood, J. Extension of first order Predictive Functional Controllers to handle higher order internal models. Int. J. Appl. Math. Comput. Sci. 2008, 18, 229–239. [Google Scholar] [CrossRef]
- Zabet, K.; Rossiter, J.A.; Haber, R.; Abdullah, M. Pole-placement predictive functional control for under-damped systems with real numbers algebra. ISA Trans. 2017, 71, 403–414. [Google Scholar] [CrossRef] [PubMed]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Rossiter, J.A.; Kouvaritakis, B.; Rice, M. A numerically robust state-space approach to stable-predictive control strategies. Automatica 1998, 34, 65–73. [Google Scholar] [CrossRef]
- Aftab, M.S.; Rossiter, J.A. Predictive functional control for challenging dynamic processes using a simple prestabilization strategy. Adv. Control Appl. 2022, 4, e102. [Google Scholar] [CrossRef]
- Aftab, M.S.; Rossiter, J.A. Predictive Functional Control with Explicit Pre-conditioning for Oscillatory Dynamic Systems. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Zhang, Z.; Xie, L.; Lu, S.; Rossiter, J.A.; Su, H. A low-cost pole-placement MPC algorithm for controlling complex dynamic systems. J. Process Control 2022, 111, 106–116. [Google Scholar] [CrossRef]
- Rossiter, J.A.; Abdullah, M.; Aftab, M.S. Improving the Feedforward Component for Recent Variants of Predictive Functional Control. Processes 2024, 12, 229. [Google Scholar] [CrossRef]
- Aftab, M.S.; Rossiter, J.A.; Panoutsos, G. Predictive Functional Control for Difficult Dynamic Processes with a Simplified Tuning Mechanism. In Proceedings of the 2022 UKACC 13th International Conference on Control (CONTROL), Plymouth, UK, 20–22 April 2022; pp. 130–135. [Google Scholar] [CrossRef]
- Aftab, M.S.; Rossiter, J.A.; Zhang, Z. Predictive Functional Control for Unstable First-Order Dynamic Systems. In CONTROLO 2020; Lecture Notes in Electrical Engineering; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 12–22. [Google Scholar] [CrossRef]
- Aftab, M.S.; Rossiter, J.A.; Panoutsos, G. Predictive Functional Control for Difficult Second-Order Dynamics with a Simple Pre-compensation Strategy. In Proceedings of the 2022 UKACC 13th International Conference on Control (CONTROL), Plymouth, UK, 20–22 April 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Ogata, K. Discrete-Time Control Systems, 2nd ed.; Prentice Hall Englewood: Cliffs, NJ, USA, 1995. [Google Scholar]
- Nise, N.S. Control Systems Engineering, 6th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Goodwin, G. Control System Design; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Hasirci, U. An engineering education tool for real-time nonlinear control: Stabilization of a single link robot. Int. J. Electr. Eng. Educ. 2015, 52, 320–339. [Google Scholar] [CrossRef]
- Bequette, B. Behavior of a CSTR with a recirculating jacket heat transfer system. In Proceedings of the Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar] [CrossRef]
- Rao, A.S.; Chidambaram, M. Analytical design of modified Smith predictor in a two-degrees-of-freedom control scheme for second order unstable processes with time delay. ISA Trans. 2008, 47, 407–419. [Google Scholar] [CrossRef] [PubMed]
- MathWorks. Model Reducer: Reduce Complexity of Linear Time-Invariant (LTI) Models. 2024. Available online: https://www.mathworks.com/help/control/ref/modelreducer-app.html (accessed on 3 February 2025).
- MathWorks. PID Tuning Algorithm. 2024. Available online: https://www.mathworks.com/help/control/getstart/pid-tuning-algorithm.html (accessed on 3 February 2025).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Scenario | Case Study 1 | Case Study 2 |
|---|---|---|---|
| 1. | No disturbance, noise, and/or modelling uncertainty | ||
| 2. | Added disturbance | ||
| 3. | Added measurement noise and modelling uncertainty | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aftab, M.S.; Rossiter, J.A. Efficient Dual-Loop PFC for Challenging Dynamic Processes. Processes 2025, 13, 862. https://doi.org/10.3390/pr13030862
Aftab MS, Rossiter JA. Efficient Dual-Loop PFC for Challenging Dynamic Processes. Processes. 2025; 13(3):862. https://doi.org/10.3390/pr13030862
Chicago/Turabian StyleAftab, Muhammad Saleheen, and John Anthony Rossiter. 2025. "Efficient Dual-Loop PFC for Challenging Dynamic Processes" Processes 13, no. 3: 862. https://doi.org/10.3390/pr13030862
APA StyleAftab, M. S., & Rossiter, J. A. (2025). Efficient Dual-Loop PFC for Challenging Dynamic Processes. Processes, 13(3), 862. https://doi.org/10.3390/pr13030862