
Study on Particle Sedimentation in a Cavity Containing Obstacles


Abstract
:1. Introduction
2. Numerical Methods
2.1. Multiple Relaxation Time Lattice Boltzmann Method
2.2. Direct Force Method of IBM
2.3. The Equation of Motion for Particles
2.4. Particle–Obstacle and Particle–Wall Interactions
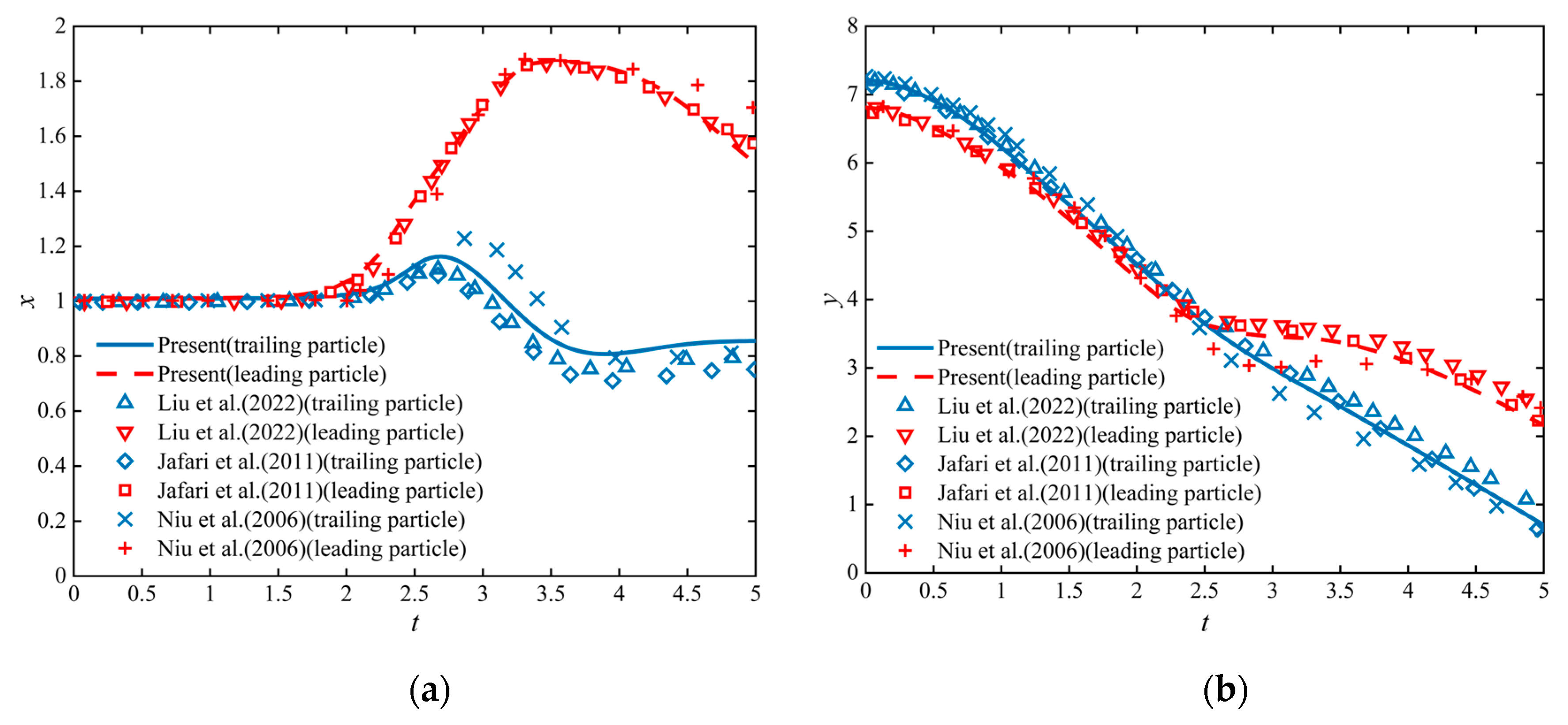
2.5. Model Validation
3. Results and Discussion
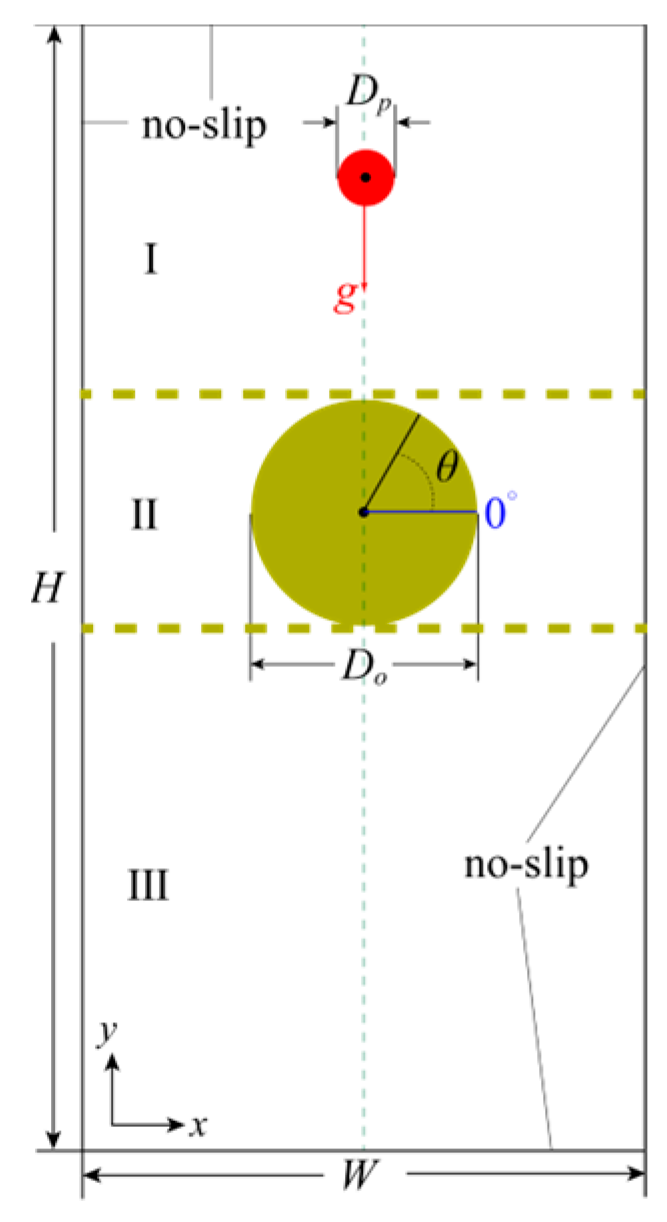
3.1. The Sedimentation of a Single Circular Particle in a Cavity Containing an Obstacle
3.2. Influence of Particle–Obstacle Eccentricity on Particle Sedimentation
3.3. The Influence of the Particle–Obstacle Diameter Ratio on Particle Sedimentation
3.4. Influence of the Particle Diameter to Obstacle Spacing Ratio on Particle Sedimentation
4. Conclusions
- (1)
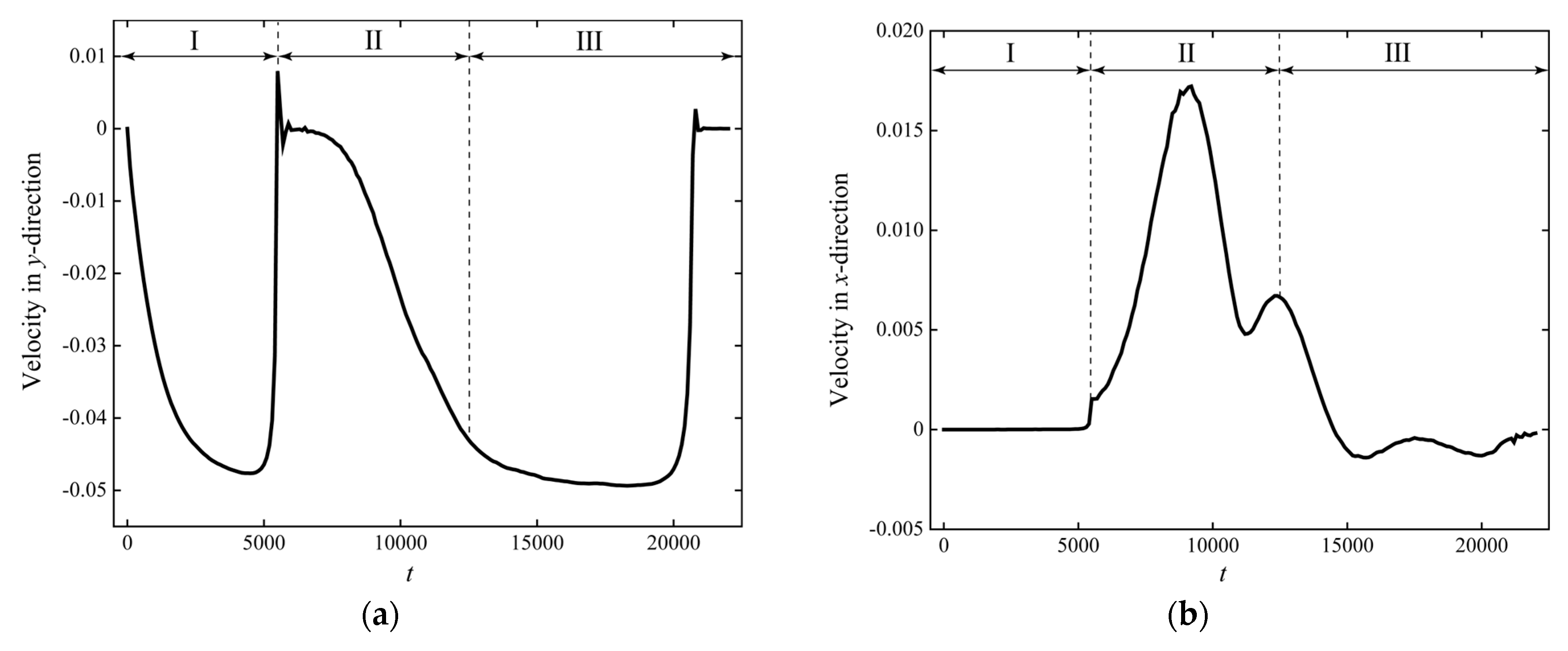
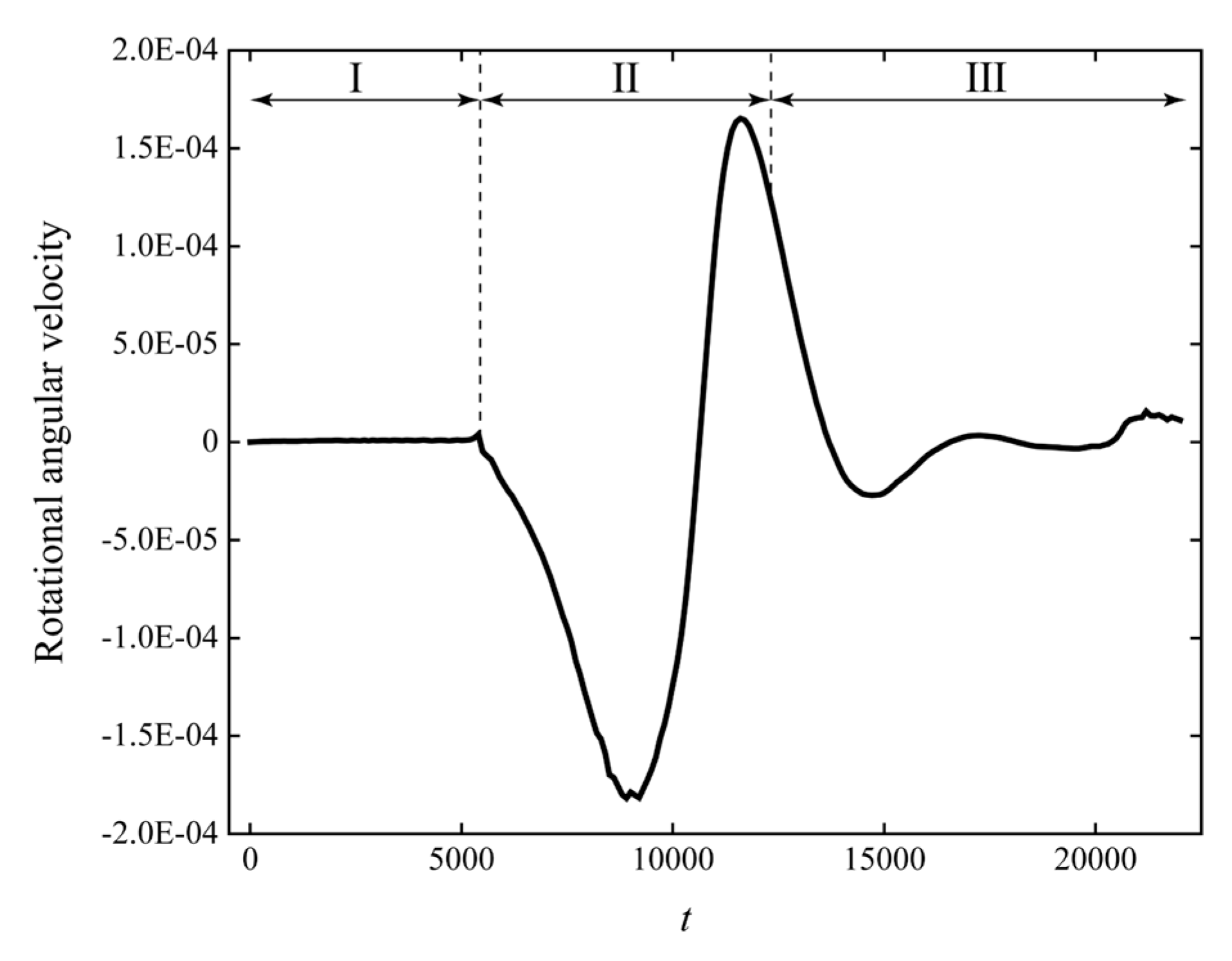
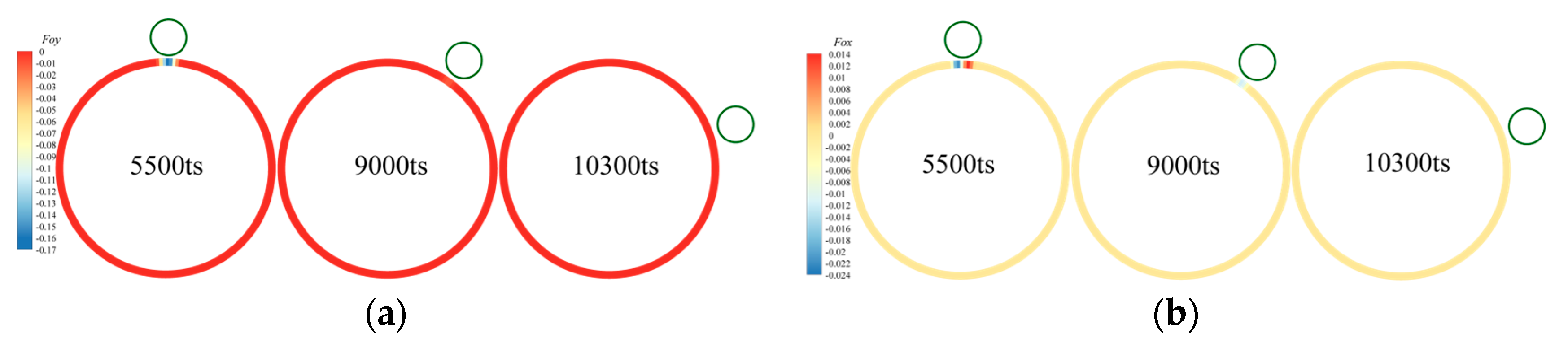
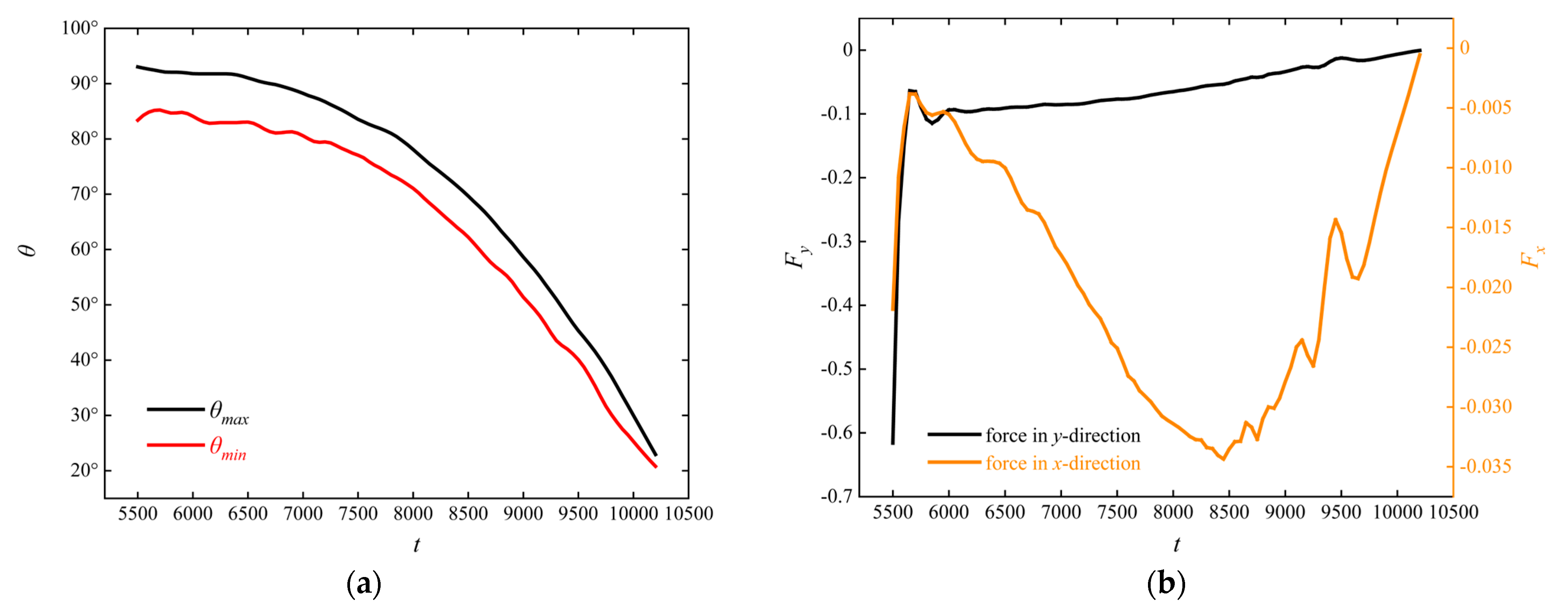
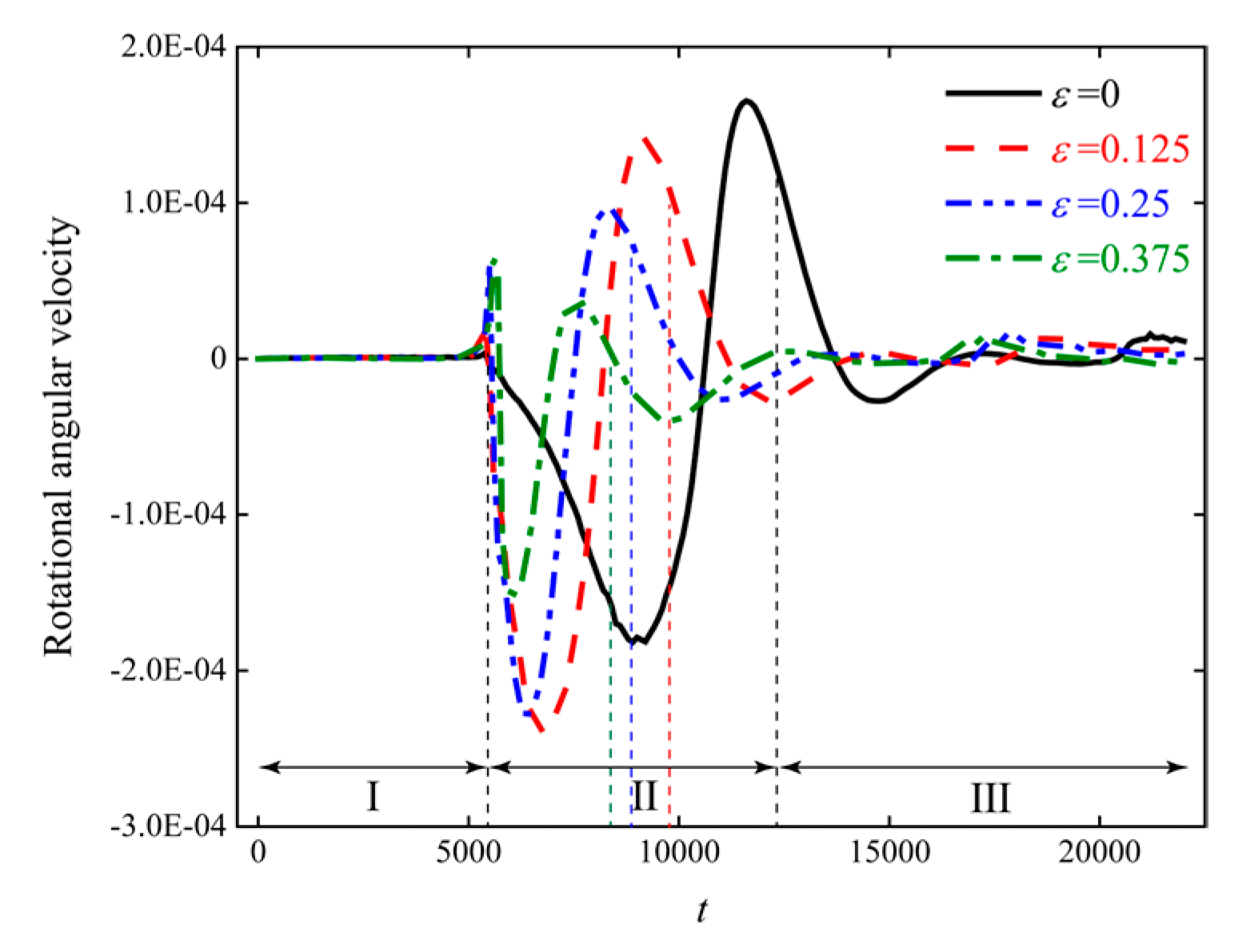
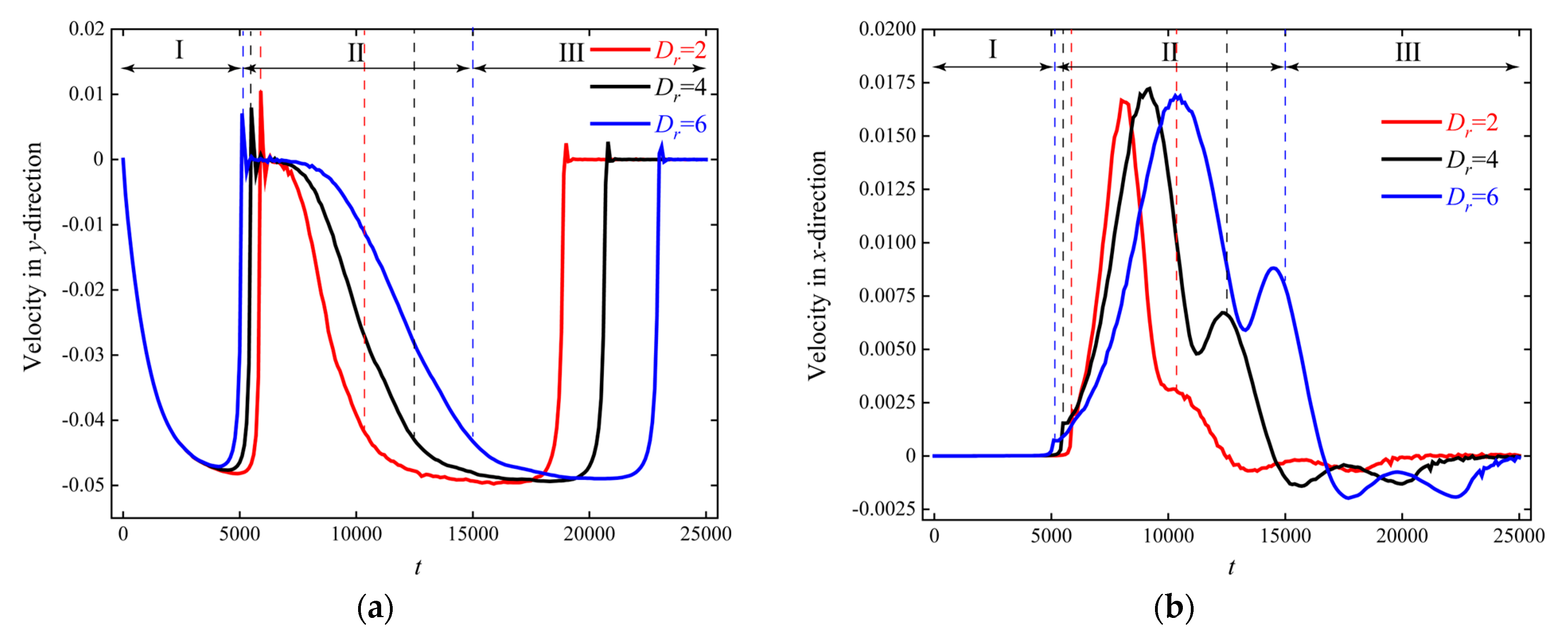
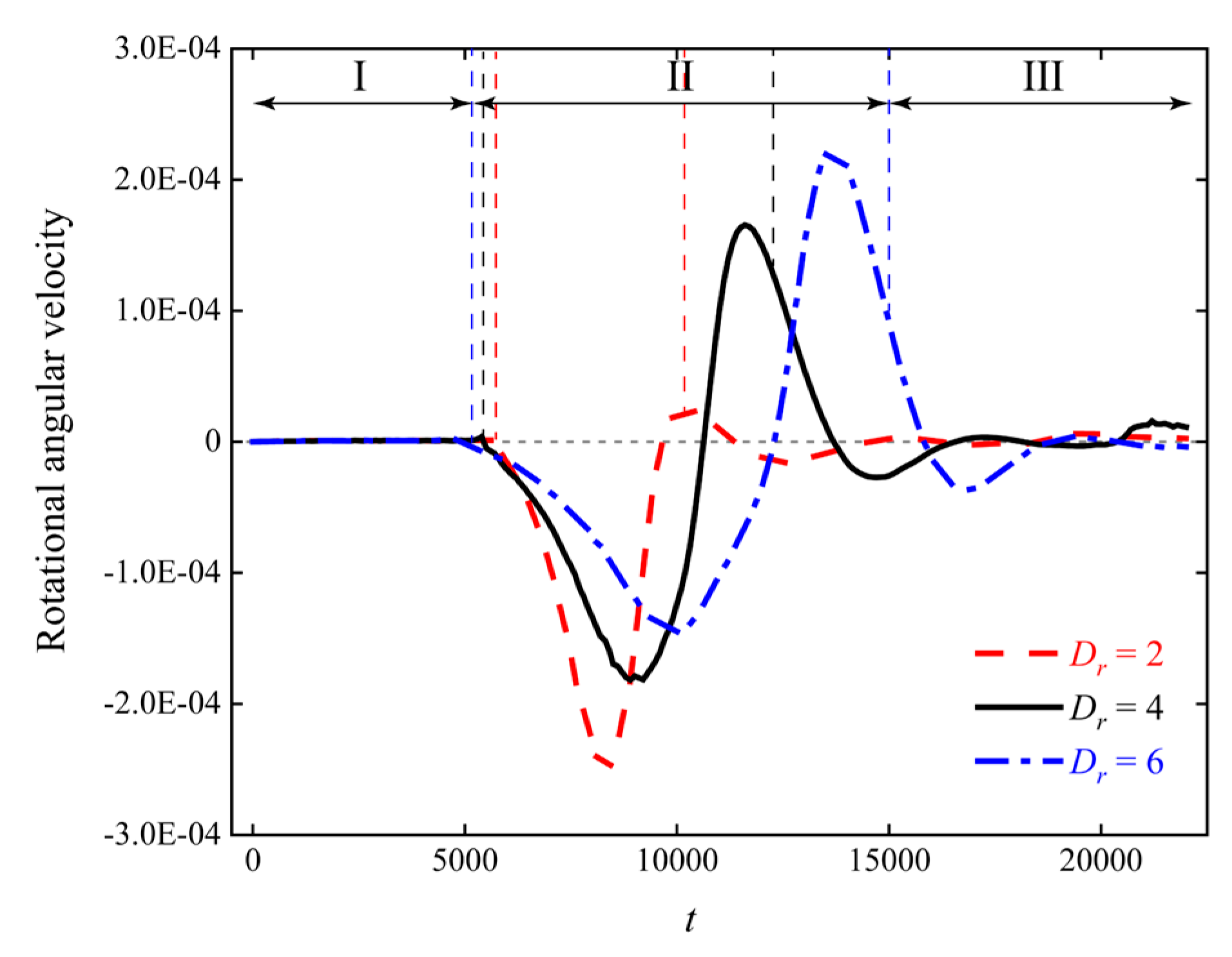
- The sedimentation process of the particle in a cavity with an obstacle can be divided into three stages. During the entire sedimentation period, the particle’s velocity in the y-direction first increases, then decreases, and finally increases again until the particle settles at a constant speed. The velocity in the x-direction shows an initial increase followed by a decrease. In Stage 2, the particle first rotates clockwise around the obstacle and then changes its rotational direction. During this period, the obstacle provides both support and propulsion to the particle, with the support force being roughly an order of magnitude greater than the propulsion force.
- (2)
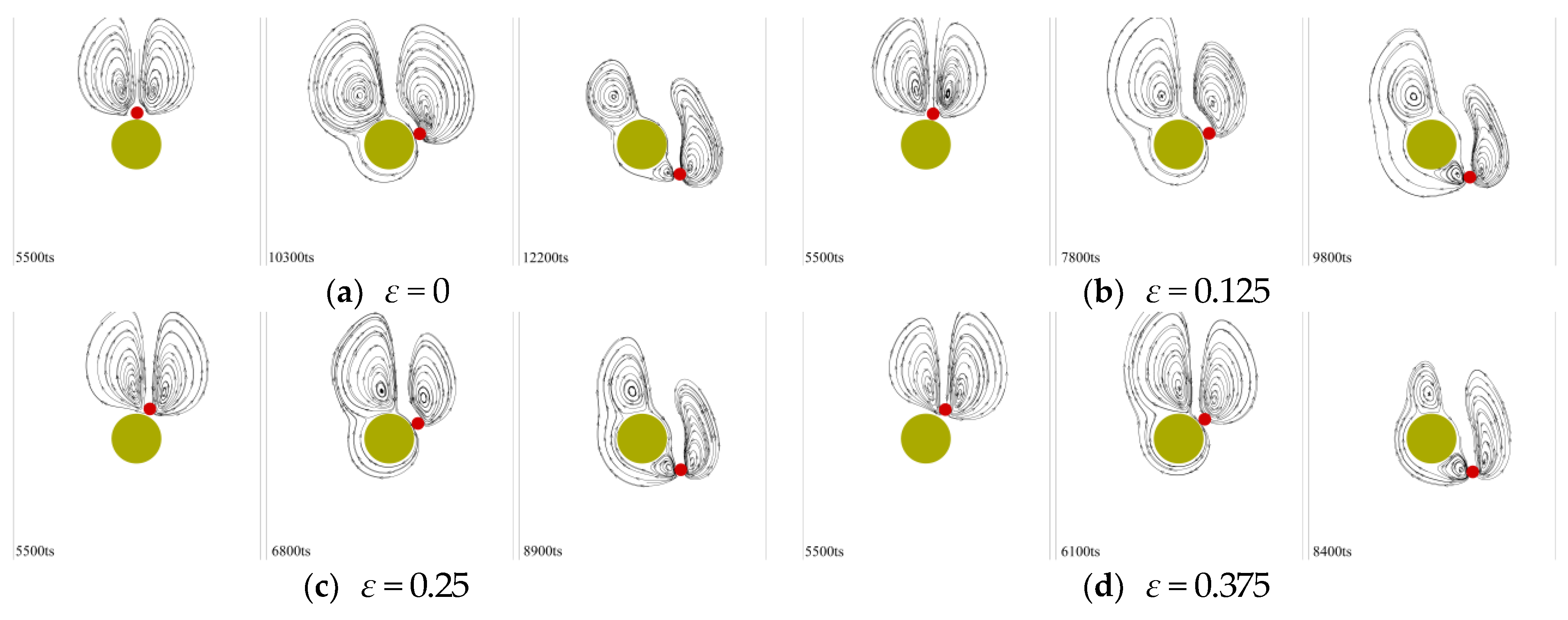
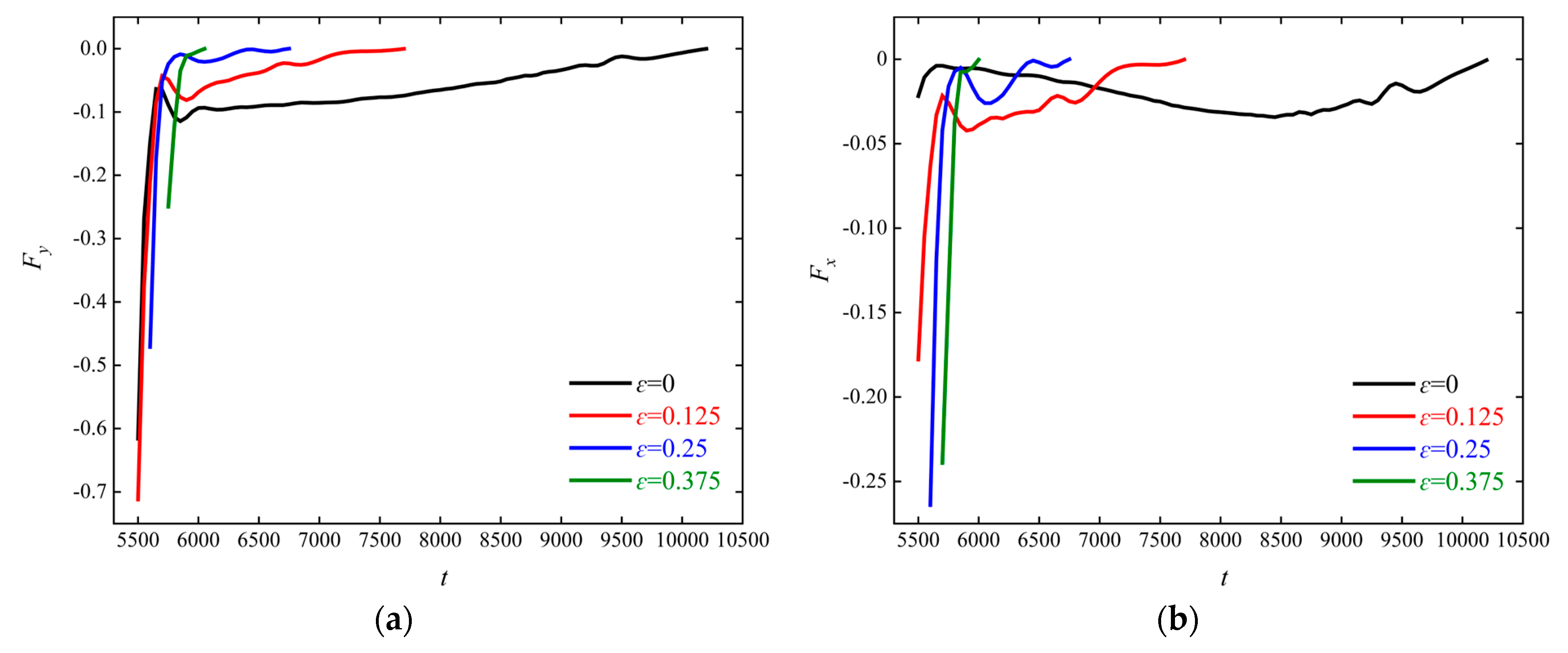
- As the particle–obstacle eccentricity increases, the extreme values of the particle’s velocity in the y-direction and x-direction in Stage 2 both increase, while the area affected by the particle on the obstacle decreases, and the duration of the interaction shortens.
- (3)
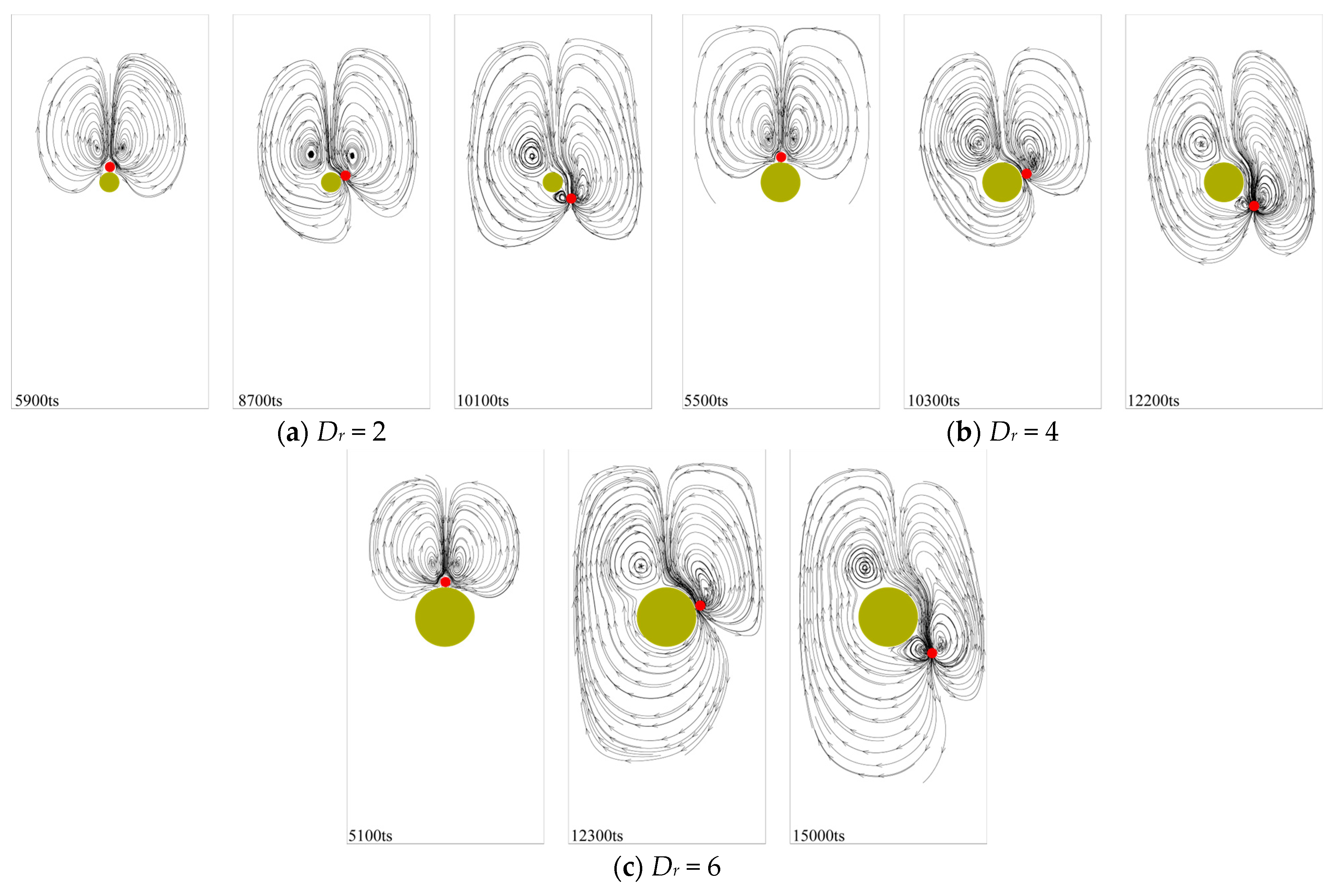
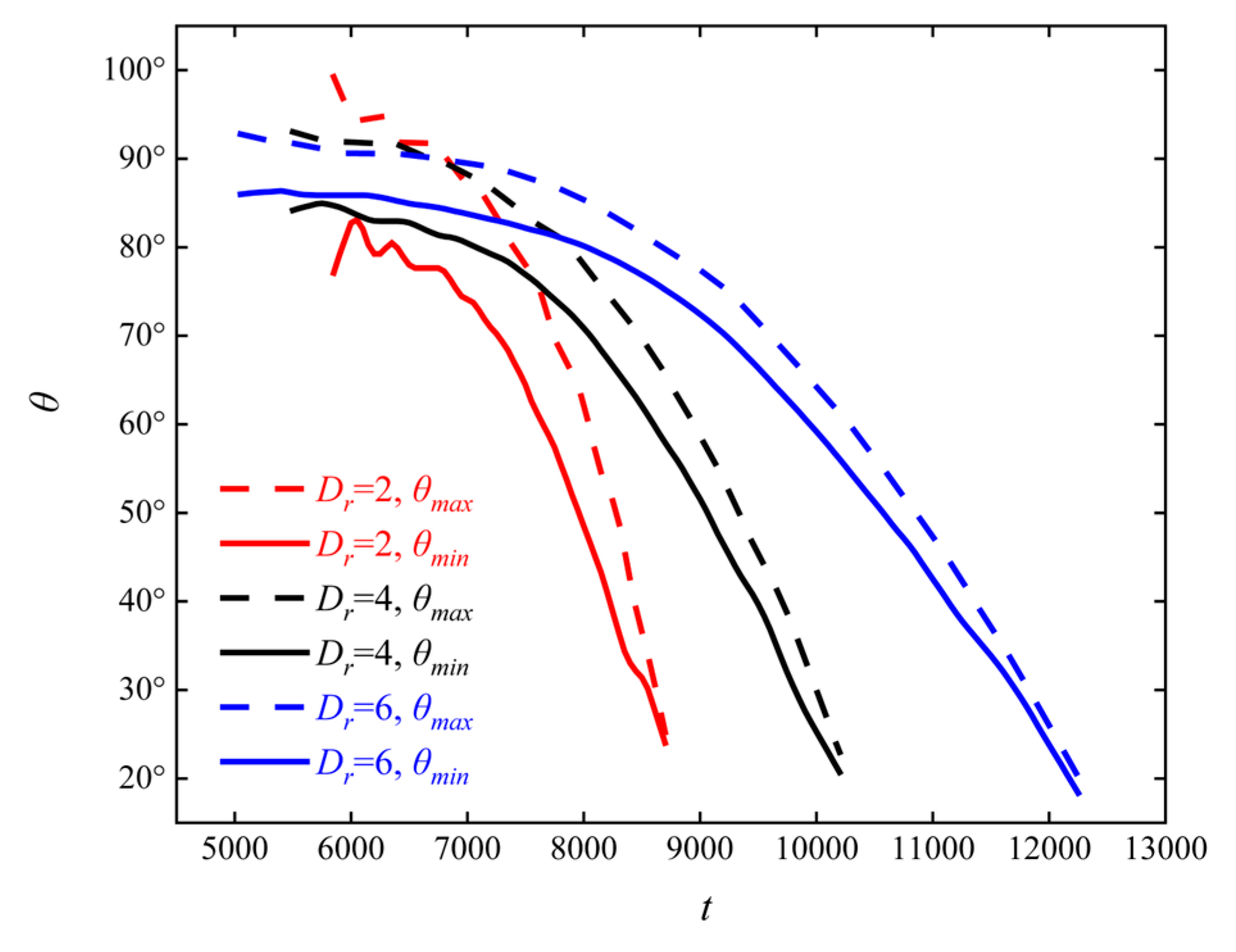
- As the particle–obstacle diameter ratio Dr increases, the extreme value of the particle’s velocity in the y-direction in Stage 2 decreases, the moment when the velocity in the x-direction reaches its extreme value is delayed, the area affected by the particle on the obstacle increases, and the duration of the interaction is prolonged.
- (4)
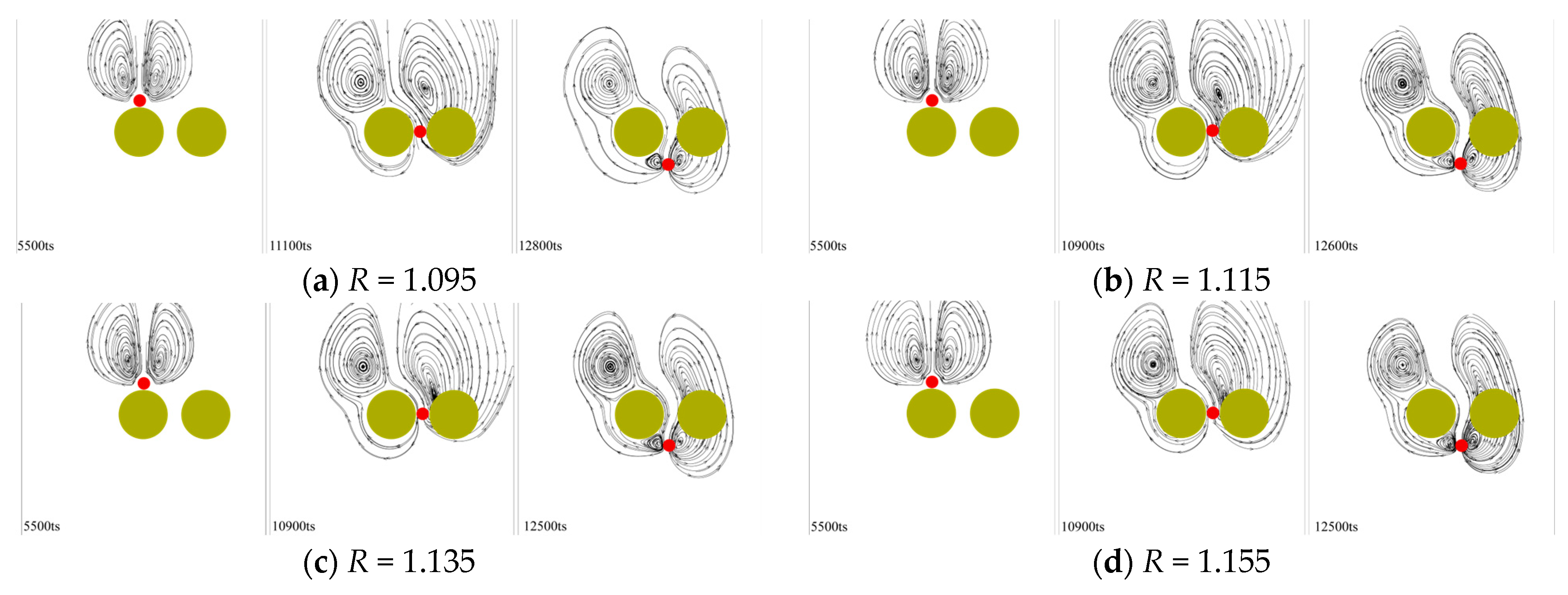
- When a particle settles through the gap between two obstacles, if the particle diameter to obstacle spacing ratio R is small, the influence of the far-side obstacle causes the particle to exhibit a phenomenon where its motion trend is disrupted and then restored in a shorter period during in Stage 2, accompanied by a secondary interaction with the near-side obstacle. As R increases, the influence of the far-side obstacle gradually decreases, and after surpassing a certain threshold (R ≥ 1.195), the effect of the far-side obstacle on the settling particle disappears.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| the fluid distribution function of particles at time t and position x | |
| the discrete velocity | |
| the lattice time | |
| the current position of the particle | |
| the equilibrium distribution function | |
| the weight coefficient | |
| the lattice sound speed | |
| the lattice speed | |
| the grid steps | |
| the time steps | |
| the fluid density | |
| the fluid velocity | |
| the orthogonal matrix | |
| a non-negative diagonal matrix | |
| the discrete external force term | |
| the external force term | |
| the relaxation time | |
| the fluid’s shear viscosity | |
| the force calculated from the velocity difference at the Lagrangian points | |
| the coordinates of the b-th Lagrangian point | |
| the velocity of the Lagrangian point itself | |
| the velocity of the fluid at the Lagrangian point without external forces | |
| the two-dimensional discrete trigonometric function | |
| the coordinates of the Eulerian nodes | |
| Mp | the mass of the particle |
| Ip | the moment of inertia of the particle |
| Up | the translational velocity of the particle |
| Ωp | the rotational velocity of the particle |
| Fh | the force exerted by the fluid on the particle |
| Fg | the gravitational force acting on the particle |
| the torque acting on the particle | |
| the repulsive force between the particle and obstacle | |
| the repulsive force between the particle and wall | |
| the collision force acting on the particle | |
| Ar | Archimedes number |
| the particle density | |
| the particle diameter | |
| g | the gravitational acceleration |
| Do | the obstacle diameter |
| xp | the horizontal position of the particle’s center of mass |
| yp | the vertical height of the particle’s center of mass |
| xo | the horizontal position of the obstacle’s center |
| yo | the vertical height of the obstacle’s center |
| θ | the center angle of the obstacle’s center |
| the particle–obstacle eccentricity | |
| Fx | the force in the x-direction acting on the obstacle surface by the particle |
| Fy | the force in the y-direction acting on the obstacle surface by the particle |
| ω | the angular velocity of the particle |
| Dr | the particle–obstacle diameter ratio |
| R | the particle diameter to obstacle spacing ratio |
References
- Hamisi, R.; Renman, A.; Renman, G.; Wörman, A.; Thunvik, R. Treatment efficiency and recovery in sand filters for on-site wastewater treatment: Column studies and reactive modelling. J. Clean. Prod. 2024, 462, 142696. [Google Scholar] [CrossRef]
- Zhou, F.Q.; Guo, Y.N.; Qian, H.; Fu, S.C.; Yuan, H.X. Effect of wall roughness on particle deposition on the outer wall of the vortex finder in a cyclone separator. Adv. Powder Technol. 2024, 35, 104428. [Google Scholar] [CrossRef]
- Zhu, D.Y.; Liu, Q.Y.; Meng, Q.Q.; Jin, Z.J. Enhanced effects of large-scale CO2 transportation on oil accumulation in oil-gas-bearing basins—Implications from supercritical CO2 extraction of source rocks and a typical case study. Mar. Pet. Geol. 2018, 92, 493–504. [Google Scholar] [CrossRef]
- Francesco, G.; Peter, M.; Judith, M.C.; Maurice, W.; Andrew, W.; Eann, A.P. Settling dynamics of nanoparticles in simple and biological media. R. Soc. Open Sci. 2021, 8, 210068. [Google Scholar]
- Li, Y.N.; Xu, Z.H.; Zhan, X.Y.; Zhang, T.B. Summary of experiments and influencing factors of sediment settling velocity in still water. Water 2024, 16, 938. [Google Scholar] [CrossRef]
- Zeng, G.; Jin, Y.; Qu, H.; Lu, Y.H. Experimental investigation and correlations for proppant distribution in narrow fractures of deep shale gas reservoirs. Pet. Sci. 2022, 19, 619–628. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, X.F.; Zhao, J.P.; Chu, Z.K.; Cao, Y.X.; Yang, Y.; Duan, M.J.; Fan, H.; Qu, X.R. Experimental study of flow regimes and dust emission in a free falling particle stream. Powder Technol. 2016, 292, 14–22. [Google Scholar] [CrossRef]
- Fortes, A.F.; Joseph, D.D.; Lundgren, T.S. Nonlinear mechanics of fluidization of beds of spherical particles. Fluid Mech. 1987, 177, 467–483. [Google Scholar] [CrossRef]
- Zhang, G.D.; Gutierrez, M.; Li, M.Z. A coupled CFD-DEM approach to model particle-fluid mixture transport between two parallel plates to improve understanding of proppant micromechanics in hydraulic fractures. Powder Technol. 2017, 308, 235–248. [Google Scholar] [CrossRef]
- Su, J.; Zhou, C.J.; Jiang, C.; Zheng, M. The movement law and orientation control of rectangular particles in the viscous fluid domain based on IS-FEM. Adv. Powder Technol. 2022, 33, 103634. [Google Scholar] [CrossRef]
- Fernandes, C.; Faroughi, S.A. Particle-level simulation of magnetorheological fluids: A fully-resolved solver. Int. J. Multiph. Flow 2023, 169, 104604. [Google Scholar]
- Zou, L.; Sun, J.Z.; Sun, Z.; Yu, Z.B.; Zhao, H.B. Study of two free-falling spheres interaction by coupled SPH–DEM method. Eur. J. Mech. B Fluids 2022, 92, 49–64. [Google Scholar]
- Suh, Y.K.; Kang, J.F.; Kang, S.M. Assessment of algorithms for the no-slip boundary condition in the lattice Boltzmann equation of BGK model. Int. J. Numer. Methods Fluids 2008, 58, 1353–1378. [Google Scholar]
- Lin, C.L.; Videla, A.R.; Miller, J.D. Advanced three-dimensional multiphase flow simulation in porous media reconstructed from X-ray microtomography using the He–Chen–Zhang lattice Boltzmann model. Flow Meas. Instrum. 2010, 21, 255–261. [Google Scholar]
- Yang, F.; Jin, H.; Dai, M.Y. On the spreading behavior of a droplet on a circular cylinder using the lattice Boltzmann method. Chin. Phys. B 2024, 33, 064702. [Google Scholar]
- Yang, F.; Dai, M.Y.; Jin, H. Lattice Boltzmann simulation of cavitating flow in a two-dimensional nozzle with moving needle valve. Processes 2024, 12, 813. [Google Scholar] [CrossRef]
- Chen, W.Y.; Yang, F.; Yan, Y.H.; Guo, X.Y.; Dai, R.; Cai, X.S. Lattice Boltzmann simulation of the spreading behavior of a droplet impacting on inclined solid wall. J. Mech. Sci. Technol. 2018, 32, 2637–2649. [Google Scholar]
- Yang, F.; Shao, X.S.; Wang, Y.; Lu, Y.S.; Cai, X.S. Resistance characteristics analysis of droplet logic gate based on lattice Boltzmann method. Eur. J. Mech. B Fluids 2021, 86, 90–106. [Google Scholar]
- Gong, S.; Cheng, P. Lattice Boltzmann simulation of periodic bubble nucleation, growth and departure from a heated surface in pool boiling. Int. J. Heat Mass Transfer 2013, 64, 122–132. [Google Scholar]
- Wang, N.Q.; Korba, D.; Liu, Z.X.; Prabhu, R.; Priddy, M.W.; Yang, S.F.; Chen, L.; Li, L.K. Phase-field-lattice Boltzmann method for dendritic growth with melt flow and thermosolutal convection–diffusion. Comput. Methods Appl. Mech. Eng. 2021, 385, 114026. [Google Scholar] [CrossRef]
- Yang, F.; Yang, H.C.; Yan, Y.H.; Guo, X.Y.; Dai, R.; Liu, C.Q. Simulation of natural convection in an inclined polar cavity using a finite-difference lattice Boltzmann method. J. Mech. Sci. Technol. 2017, 31, 3053–3065. [Google Scholar]
- Ashorynejad, H.R.; Shahriari, A. MHD natural convection of hybrid nanofluid in an open wavy cavity. Results Phys. 2018, 9, 440–455. [Google Scholar]
- Chai, Z.H.; Shi, B.C.; Guo, Z.L.; Rong, F.M. Multiple-relaxation-time lattice Boltzmann model for generalized Newtonian fluid flows. J. Non-Newton. Fluid Mech. 2011, 166, 332–342. [Google Scholar]
- Wang, N.N.; Liu, H.H.; Zhang, C.H. Deformation and breakup of a confined droplet in shear flows with power-law rheology. J. Rheol. 2017, 61, 741–758. [Google Scholar]
- Ladd, A.J.C. Ladd. Lattice-Boltzmann methods for suspensions of solid particles. Mol. Phys. 2015, 113, 2531–2537. [Google Scholar]
- Yang, F.; Yan, Z.; Wang, W.C.; Shi, R. Motion of a rigid particle in the lid-driven cavity. Chin. Phys. B 2025, 34, 034701. [Google Scholar]
- Tao, S.; Hu, J.J.; Guo, Z.L. An investigation on momentum exchange methods and refilling algorithms for lattice Boltzmann simulation of particulate flows. Comput. Fluids 2016, 133, 1–14. [Google Scholar]
- Hu, J.J.; Tao, S.; Guo, Z.L. An efficient unified iterative scheme for moving boundaries in lattice Boltzmann method. Comput. Fluids 2017, 144, 34–43. [Google Scholar]
- Amin, A.D.; Sajjad, K.; He, F.L. Direct numerical simulation of pulsating flow effect on the distribution of non-circular particles with increased levels of complexity: IB-LBM. Comput. Math. Appl. 2022, 121, 115–130. [Google Scholar]
- Kang, S.K.; Hassan, Y.A. A direct-forcing immersed boundary method for the thermal lattice Boltzmann method. Comput. Fluids 2011, 49, 36–45. [Google Scholar]
- Habte, M.A.; Wu, C.J. Particle sedimentation using hybrid Lattice Boltzmann-immersed boundary method scheme. Powder Technol. 2017, 315, 486–498. [Google Scholar] [CrossRef]
- Guo, Z.L.; Zheng, C.G. Analysis of lattice Boltzmann equation for microscale gas flows: Relaxation times, boundary conditions and the Knudsen layer. Int. J. Comput. Fluid Dyn. 2008, 22, 465–473. [Google Scholar] [CrossRef]
- Delouei, A.A.; Nazari, M.; Kayhani, M.H.; Ahmadi, G. Direct-forcing immersed boundary—Non-Newtonian lattice Boltzmann method for transient non-isothermal sedimentation. J. Aerosol Sci. 2017, 104, 106–122. [Google Scholar] [CrossRef]
- Wang, L.; Guo, Z.L.; Mi, J.C. Drafting, kissing and tumbling process of two particles with different sizes. Comput. Fluids 2014, 96, 20–34. [Google Scholar] [CrossRef]
- Xu, A.; Li, B.T. Particle-resolved thermal lattice Boltzmann simulation using OpenACC on multi-GPUs. Int. J. Heat Mass Transfer 2024, 218, 124758. [Google Scholar] [CrossRef]
- Liu, J.; Huang, C.S.; Chai, Z.H.; Shi, B.C. A diffuse-interface lattice Boltzmann method for fluid–particle interaction problems. Comput. Fluids 2022, 233, 105240. [Google Scholar] [CrossRef]
- Jafari, S.; Yamamoto, R.; Rahnama, M. Lattice-Boltzmann method combined with smoothed-profile method for particulate suspensions. Phys. Rev. E 2011, 83, 026702. [Google Scholar] [CrossRef]
- Niu, X.D.; Shu, C.; Chew, Y.T.; Peng, Y. A momentum exchange-based immersed boundary-lattice Boltzmann method for simulating incompressible viscous flows. Phys. Lett. A 2006, 354, 173–182. [Google Scholar] [CrossRef]
- Shi, Y.; Liu, Y.; Xue, J.H.; Zhao, P.X.; Li, S.G. Study on particles sedimentation in porous media with the immersed boundary-lattice Boltzmann flux solver. Comput. Math. Appl. 2023, 129, 1–10. [Google Scholar] [CrossRef]
- Santos, J.P.A.; Sedahmed, M.; Coelho, R.C.V.; Telo da Gama, M.M. Flowing liquid crystal torons around obstacles. Micromachines 2024, 15, 1302. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| xp | yp | xo | yo | Do | Dp | ε | |||
|---|---|---|---|---|---|---|---|---|---|
| 200 | 721 | 200 | 460 | 80 | 20 | 1.01 | 1 | 0 | 0.05 |
| ε | xp | xo | yo | Do | Dp | ||||
|---|---|---|---|---|---|---|---|---|---|
| Case3.2.a | 0 | 200 | 200 | 460 | 80 | 20 | 1.01 | 1 | 0.05 |
| Case3.2.b | 0.125 | 210 | 200 | 460 | 80 | 20 | 1.01 | 1 | 0.05 |
| Case3.2.c | 0.25 | 220 | 200 | 460 | 80 | 20 | 1.01 | 1 | 0.05 |
| Case3.2.d | 0.375 | 230 | 200 | 460 | 80 | 20 | 1.01 | 1 | 0.05 |
| Dr | Do | Dp | xo | yo | ε | ||||
|---|---|---|---|---|---|---|---|---|---|
| Case3.3.a | 2 | 40 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
| Case3.3.b | 4 | 80 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
| Case3.3.c | 6 | 120 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
| R | dc | Dp | xo | yo | ε | ||||
|---|---|---|---|---|---|---|---|---|---|
| Case3.4.a | 1.095 | 21.9 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
| Case3.4.b | 1.115 | 22.3 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
| Case3.4.c | 1.135 | 22.7 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
| Case3.4.d | 1.155 | 23.1 | 20 | 200 | 460 | 0 | 1.01 | 1 | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Shi, R.; Yan, Z.; Wang, W. Study on Particle Sedimentation in a Cavity Containing Obstacles. Processes 2025, 13, 980. https://doi.org/10.3390/pr13040980
Yang F, Shi R, Yan Z, Wang W. Study on Particle Sedimentation in a Cavity Containing Obstacles. Processes. 2025; 13(4):980. https://doi.org/10.3390/pr13040980
Chicago/Turabian StyleYang, Fan, Ren Shi, Zhe Yan, and Wencan Wang. 2025. "Study on Particle Sedimentation in a Cavity Containing Obstacles" Processes 13, no. 4: 980. https://doi.org/10.3390/pr13040980
APA StyleYang, F., Shi, R., Yan, Z., & Wang, W. (2025). Study on Particle Sedimentation in a Cavity Containing Obstacles. Processes, 13(4), 980. https://doi.org/10.3390/pr13040980