
Trajectory-Integrated Kriging Prediction of Static Formation Temperature for Ultra-Deep Well Drilling


Abstract
1. Introduction
2. Methodology
2.1. Ordinary Kriging for SFT Prediction
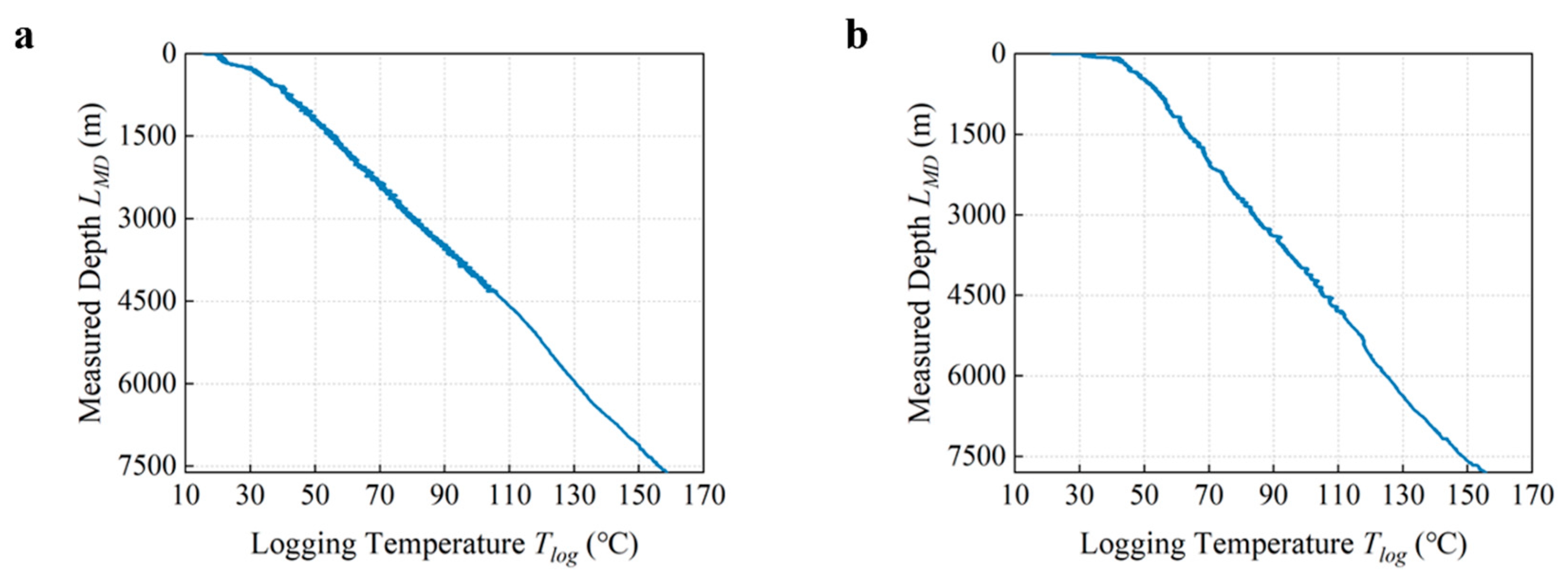
2.2. Description of SFT Data
2.3. Preprocessing of SFT Data
2.4. Statistical Metrics for Model Evaluation
3. Result Analysis
3.1. Hyperparameter Tuning of the Kriging Model
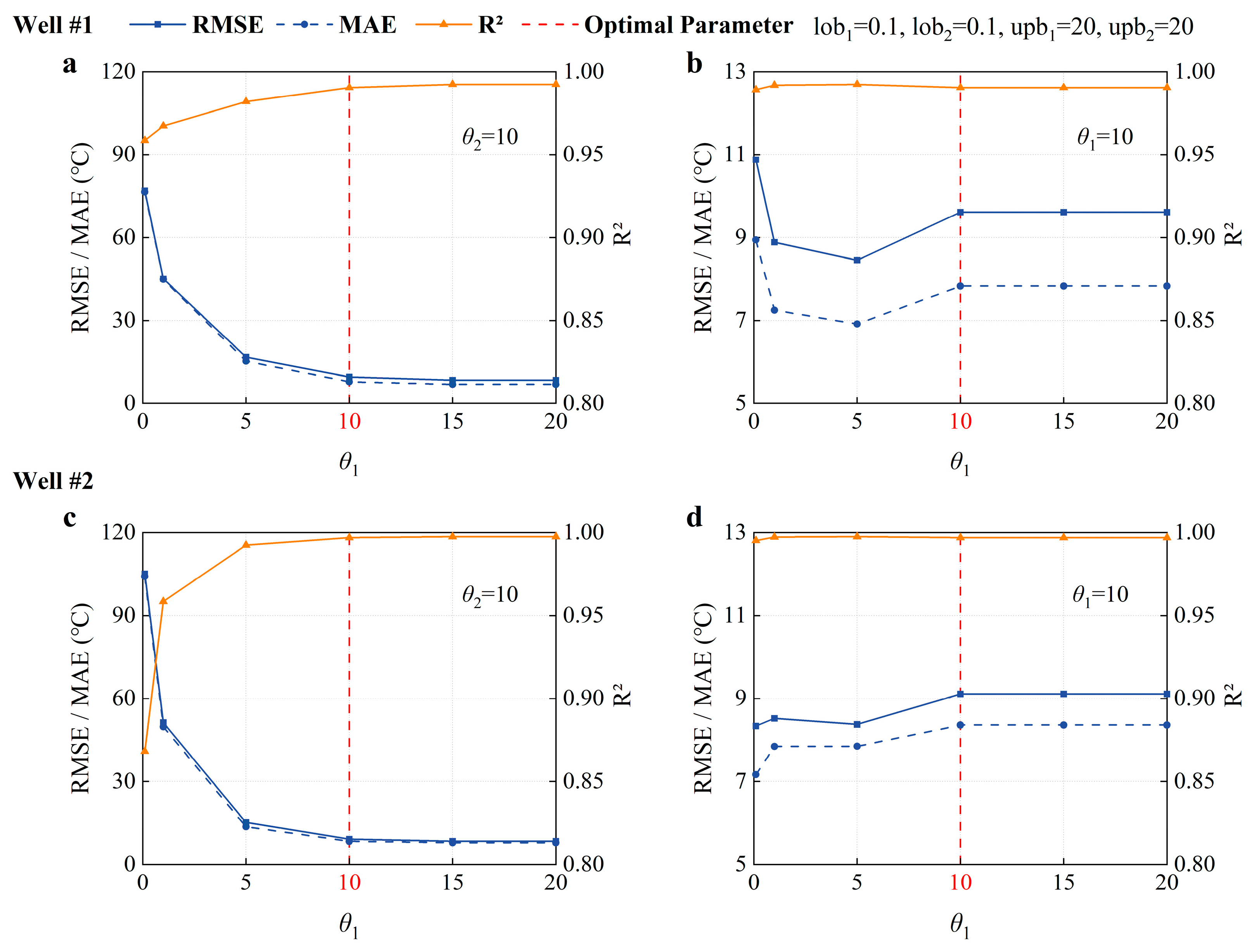
- Sensitivity Analysis of θ
- 2.
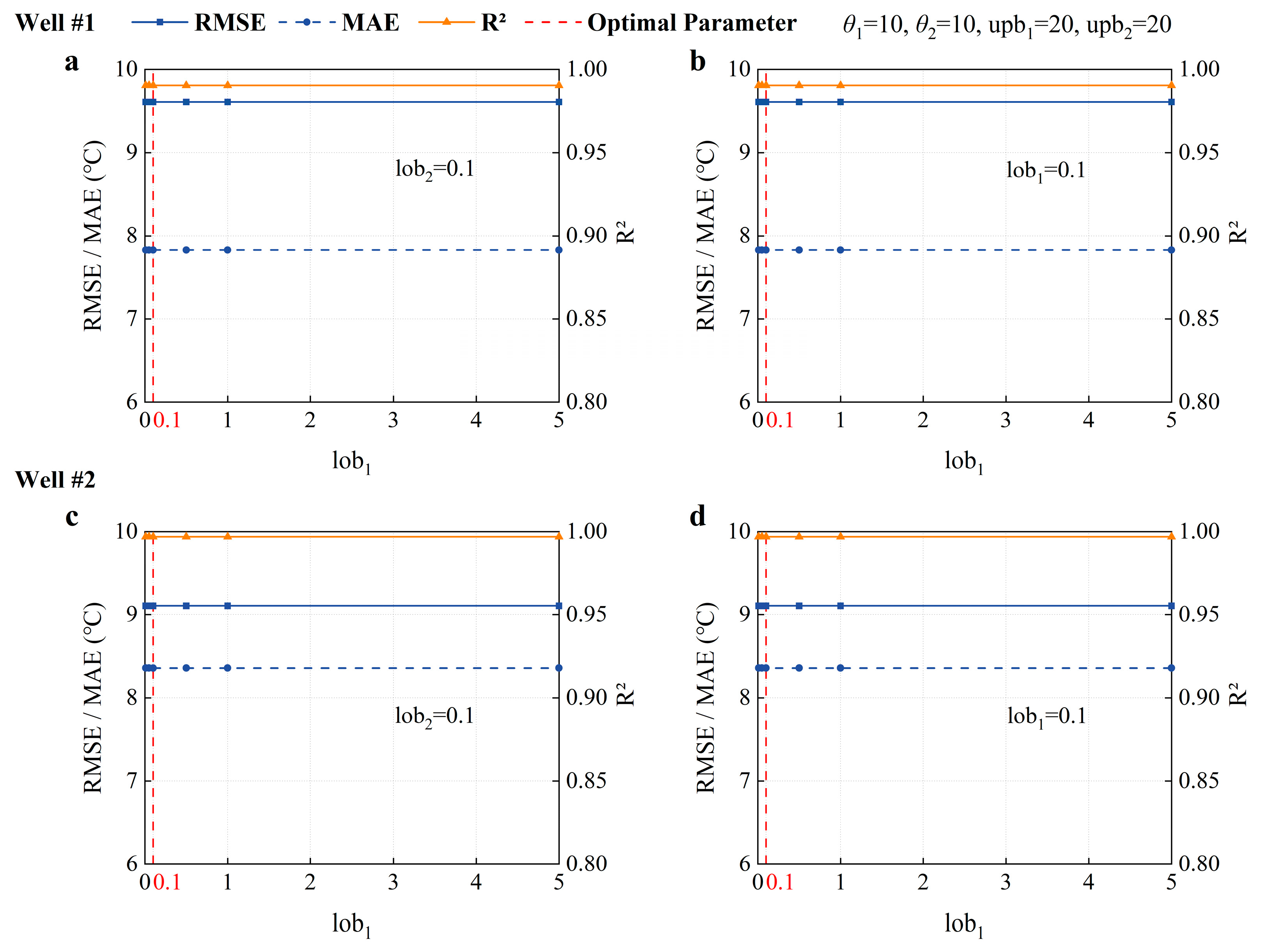
- Sensitivity Analysis of lob
- 3.
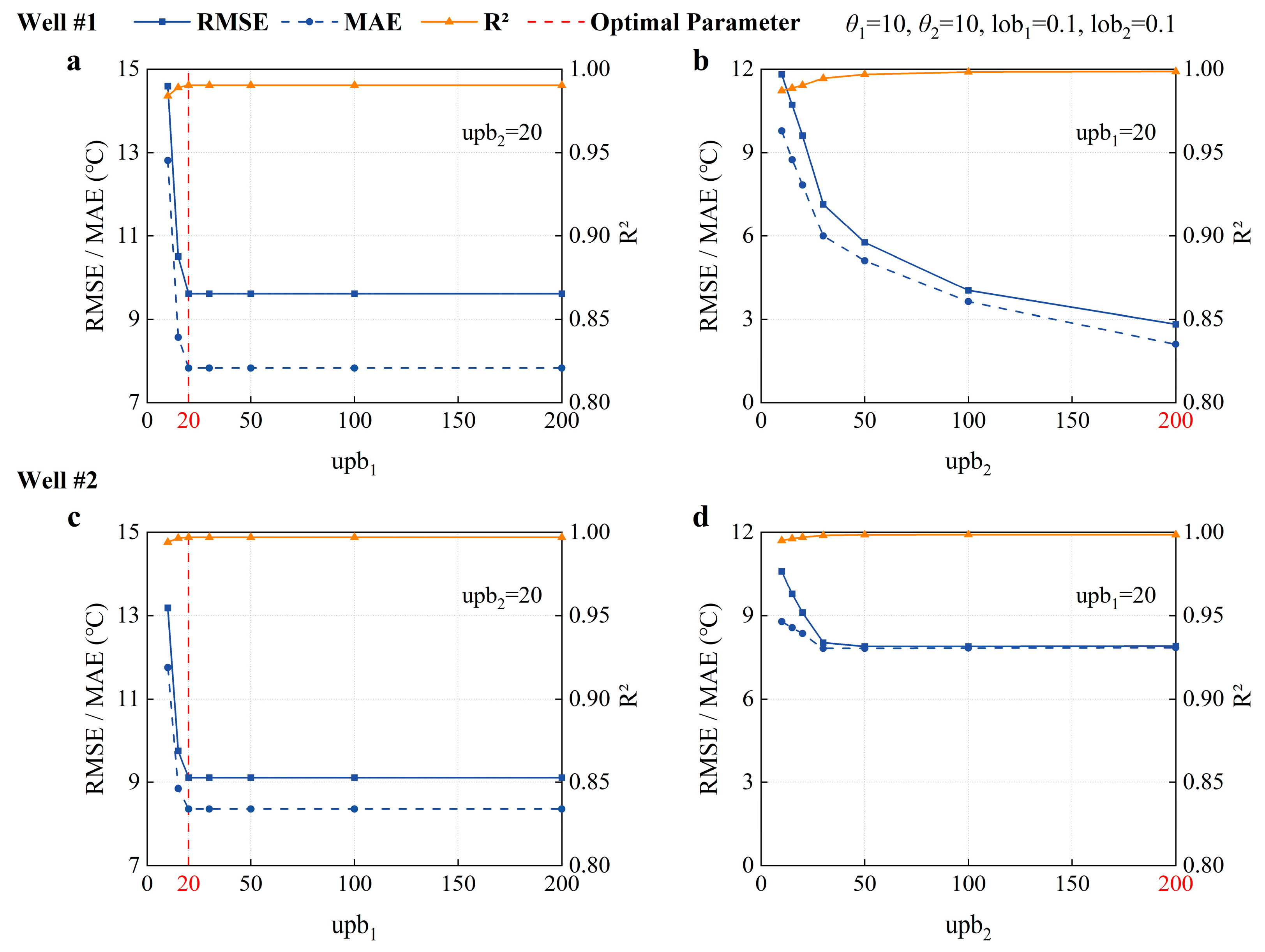
- Sensitivity Analysis of upb
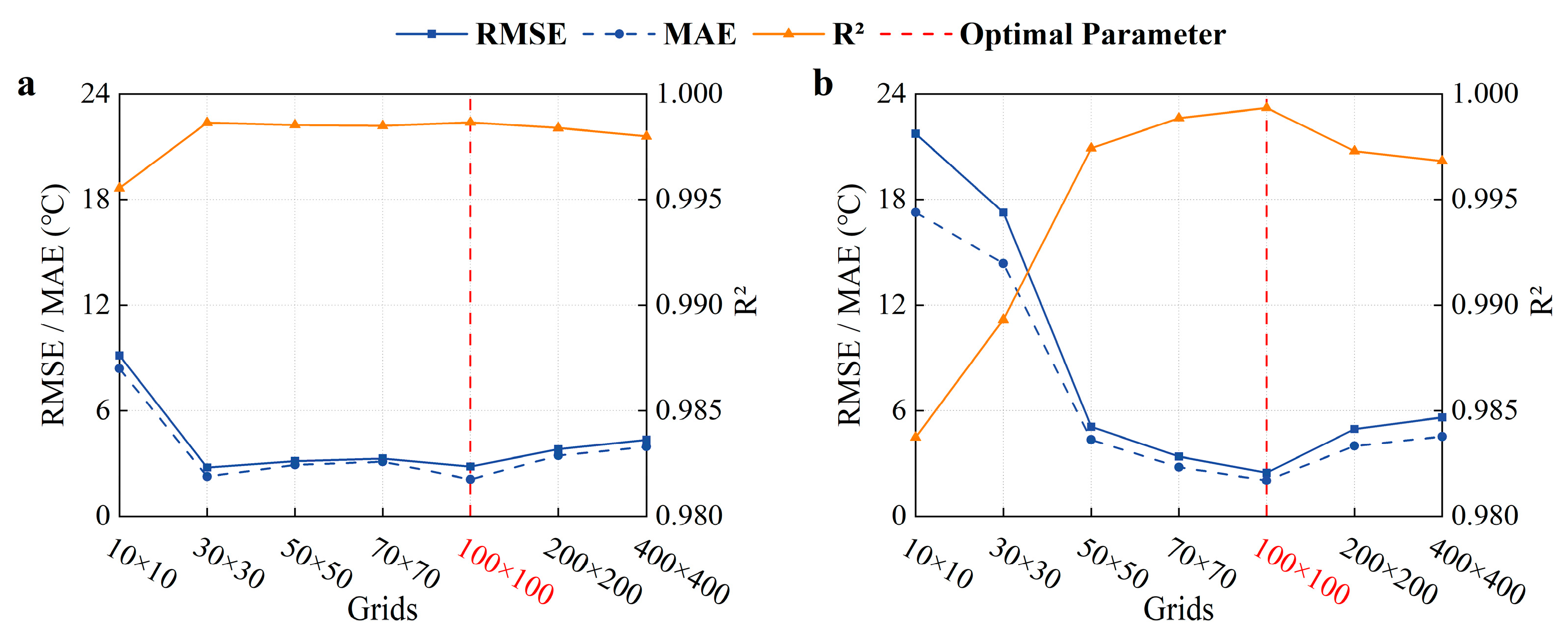
3.2. Grid Independence Analysis
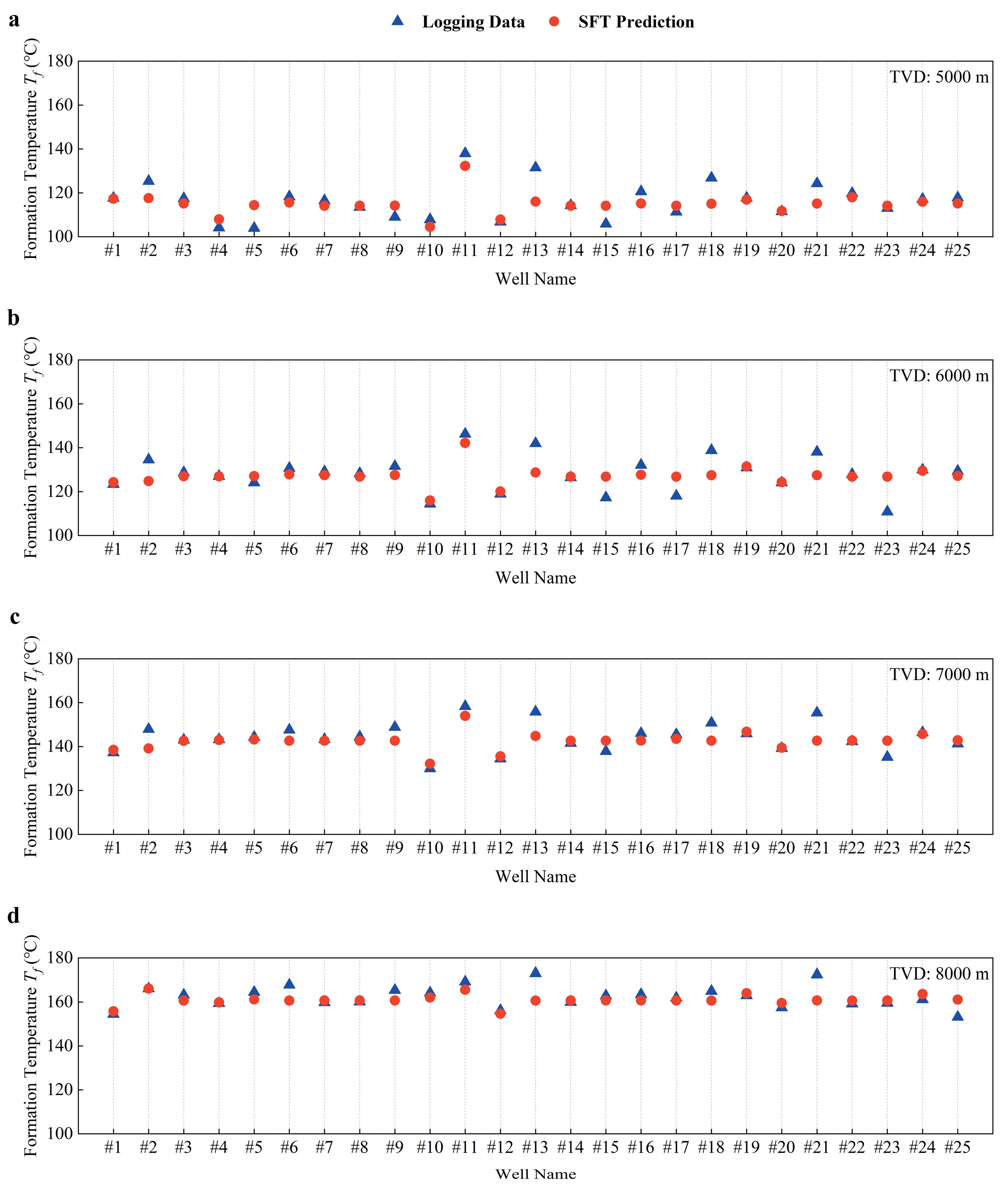
3.3. Depth-Dependent Validation Against Measured Formation Temperature Data
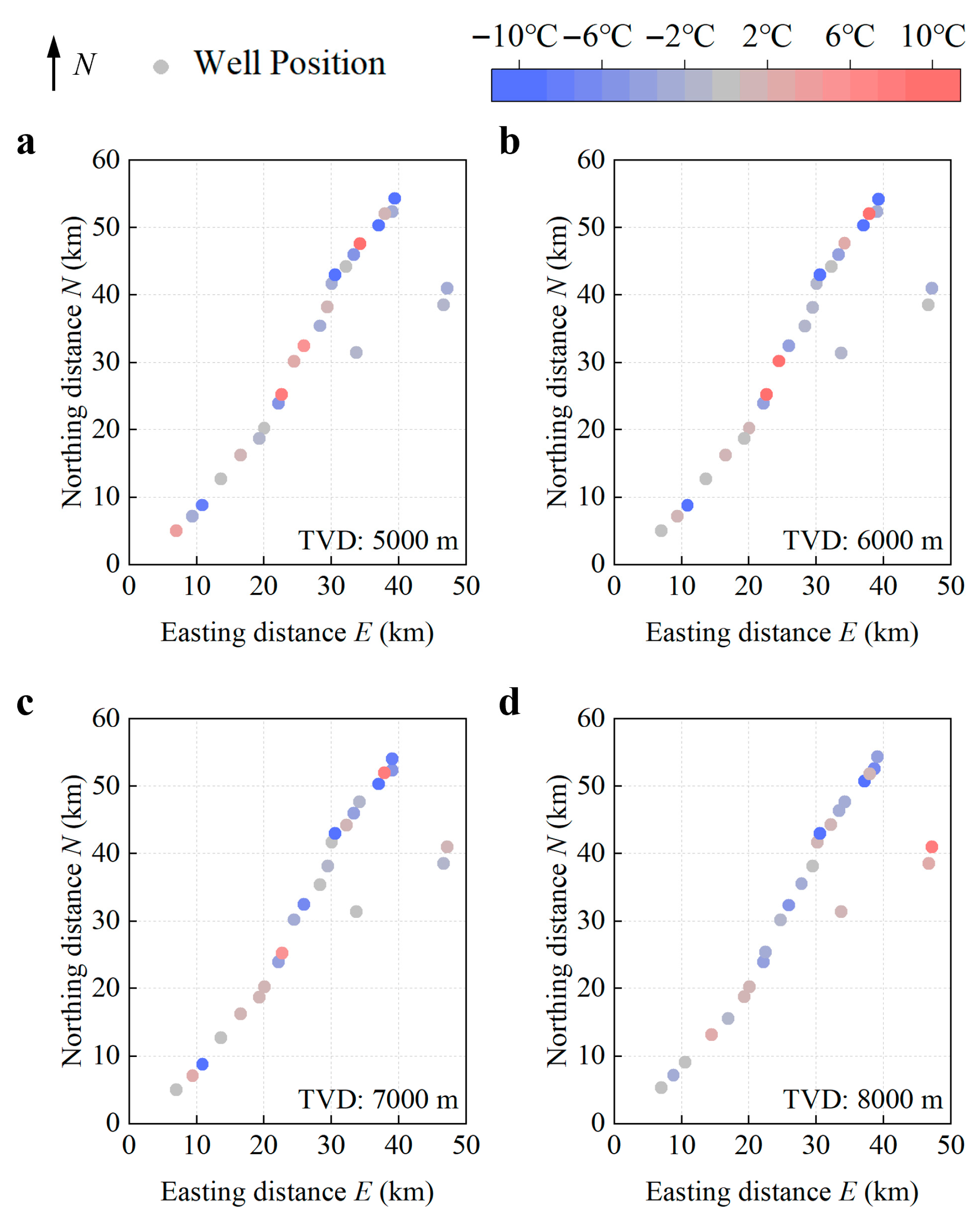
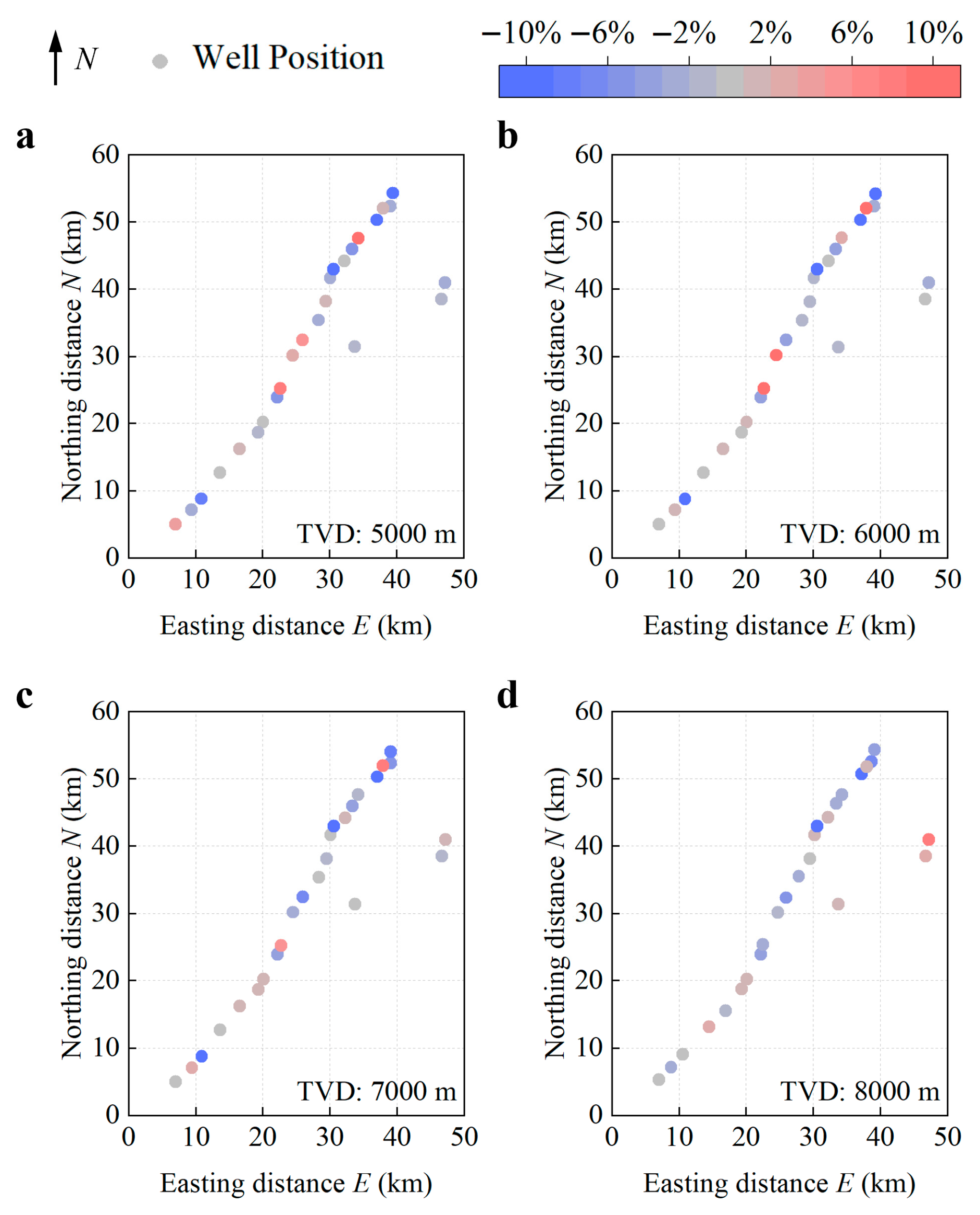
3.4. Spatial Analysis of Interpolation Errors in SFT Prediction
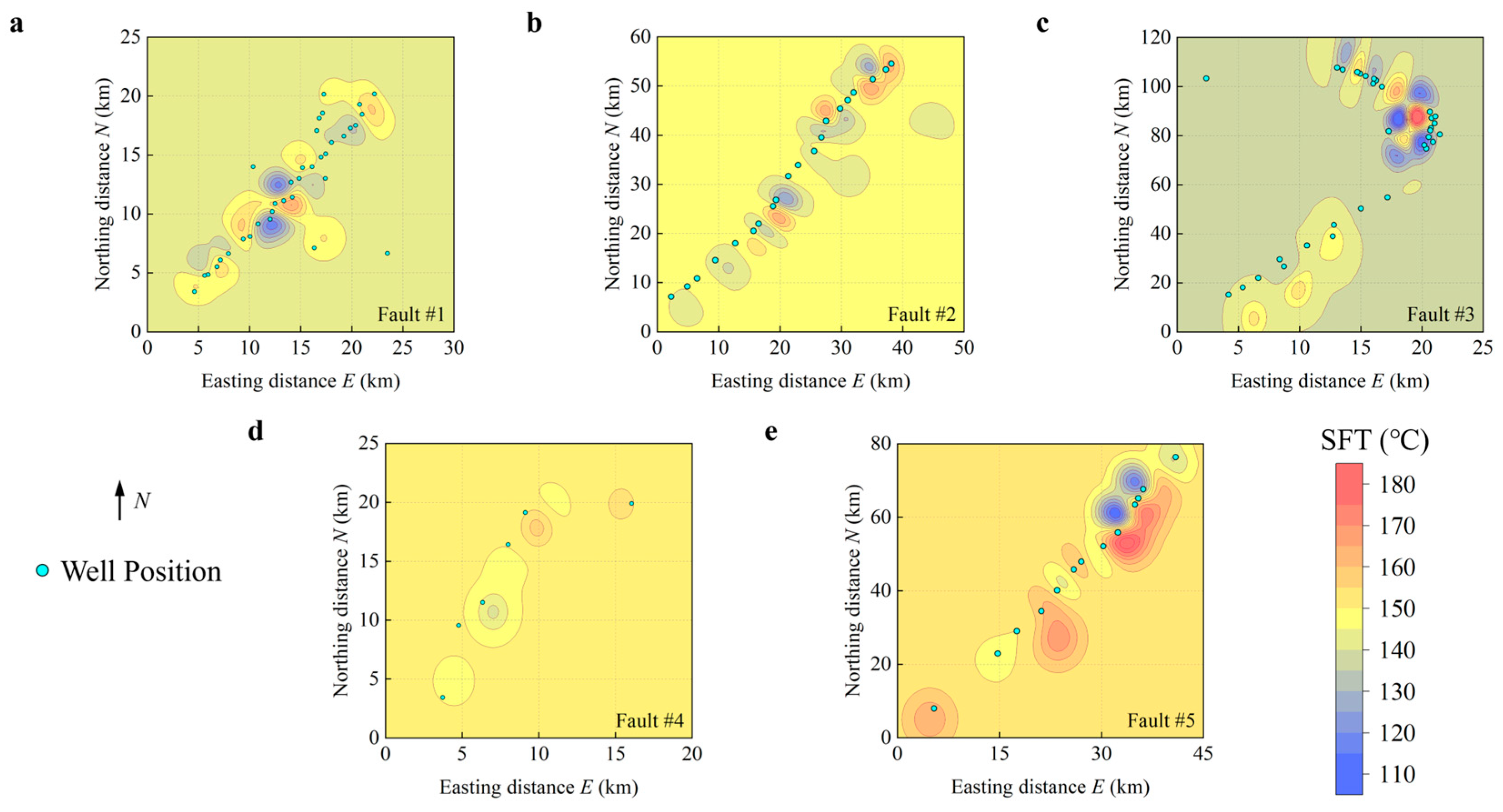
3.5. SFT Prediction of Each Fault
4. Conclusions
- (1)
- This study presents a novel pseudo-3D Kriging interpolation framework incorporating actual wellbore trajectories for pre-drilling SFT prediction in ultra-deep wells. This approach overcomes the limitations of existing methods by leveraging spatial autocorrelation, establishing an efficient and accurate prediction framework.
- (2)
- Rigorous sensitivity analysis determined the optimal hyperparameters: correlation length θ = [10, 10], lower bound lob = [0.1, 0.1], and upper bound upb = [20, 200]. This configuration minimized prediction errors (RMSE, MAE) while maximizing R2. Grid independence analysis confirmed that a 100 × 100 resolution achieves the optimal balance between accuracy and computational feasibility.
- (3)
- Validation using over 5.1 million SFT data points from 113 wells in the Shunbei Oilfield demonstrated exceptional model reliability. The predicted temperature profiles closely matched measured logging data across all depths, with relative errors (RE) consistently below 5%. Spatial error analysis revealed interpolation deviations predominantly within 5 °C, uniformly distributed without systemic bias. The model successfully captured the observed trend of temperature increasing west-to-east across the fault zones.
- (4)
- This method provides groundbreaking engineering value by enabling pseudo-3D pre-drilling SFT prediction. Unlike methods yielding averaged gradients, it delivers detailed temperature distributions for undrilled sections, enabling proactive mitigation of drilling risks caused by temperatures exceeding 150 °C. The optimized Kriging framework combines robustness with computational manageability, proving particularly effective for complex well architectures in ultra-deep reservoirs.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| covariance function | |
| variance of spatial process | |
| true vertical depth of interpolated point, m | |
| measured depth of interpolated point, m | |
| measured depth of upper survey point, m | |
| measured depth of lower survey point, m | |
| easting coordinate of interpolated point, m | |
| spatial lag distance, m | |
| measured depth, m | |
| well depth, m | |
| relative error | |
| sample size | |
| northing coordinate of interpolated point, m | |
| northing distance, m | |
| easting distance, m | |
| spatial location | |
| unobserved location | |
| observed location | |
| model computation time, s | |
| formation temperature, °C | |
| logging temperature, °C | |
| measured static formation temperature, °C | |
| predicted static formation temperature, °C | |
| mean of measured temperatures, °C | |
| mean of predicted temperatures, °C | |
| spatial process at location , °C | |
| predicted value at , °C | |
| true vertical depth increment, m | |
| easting coordinate increment, m | |
| northing coordinate increment, m | |
| Greek letters | |
| inclination angle, rad | |
| inclination at upper survey point, rad | |
| inclination at lower survey point, rad | |
| inclination of interpolated point, rad | |
| dogleg angle between survey points, rad | |
| dogleg angle to interpolated point, rad | |
| semi-variogram function, (°C)2 | |
| Kriging weight coefficient | |
| mean of spatial process, °C | |
| Azimuth angle, rad | |
| azimuth at upper survey point, rad | |
| azimuth at lower survey point, rad | |
| azimuth of interpolated point, rad | |
| Lagrangian multiplier | |
| correlation length parameter | |
| Abbreviations | |
| AI | artificial intelligence |
| BHT | bottomhole temperature |
| IQR | interquartile range |
| MAE | mean absolute error |
| MCM | minimum curvature method |
| MD | measured depth |
| OK | ordinary Kriging |
| R2 | coefficient of determination |
| RMSE | root mean squared error |
| SFT | static formation temperature |
| TVD | true vertical depth |
References
- Lei, Q.; Xu, Y.; Yang, Z.; Cai, B.; Wang, X.; Zhou, L.; Liu, H.; Xu, M.; Wang, L.; Li, S. Progress and development directions of stimulation techniques for ultra-deep oil and gas reservoirs. Pet. Explor. Dev. 2021, 48, 221–231. [Google Scholar] [CrossRef]
- Guo, X.; Hu, D.; Li, Y.; Duan, J.; Zhang, X.; Fan, X.; Duan, H.; Li, W. Theoretical Progress and Key Technologies of Onshore Ultra-Deep Oil/Gas Exploration. Engineering 2019, 5, 458–470. [Google Scholar] [CrossRef]
- Khaled, M.S.; Chen, D.; Ashok, P.; van Oort, E. Drilling heat maps for active temperature management in geothermal wells. SPE J. 2023, 28, 1577–1593. [Google Scholar] [CrossRef]
- Khaled, M.S.; Wang, N.; Ashok, P.; van Oort, E. Downhole heat management for drilling shallow and ultra-deep high enthalpy geothermal wells. Geothermics 2023, 107, 102604. [Google Scholar] [CrossRef]
- Yao, X.; Song, X.; Zhou, M.; Xu, Z.; Duan, S.; Li, Z.; Li, H. A modified heat transfer model for predicting wellbore temperature in ultra-deep drilling with insulated drill pipe. Energy 2025, 331, 136981. [Google Scholar] [CrossRef]
- Lv, Y.-G.; Chu, W.-X.; Wang, Q.-W. Thermal management systems for electronics using in deep downhole environment: A review. Int. Commun. Heat Mass Transf. 2022, 139, 106450. [Google Scholar] [CrossRef]
- Wang, J.; Nitschke, F.; Gholami Korzani, M.; Kohl, T. Temperature log simulations in high-enthalpy boreholes. Geotherm. Energy 2019, 7, 32. [Google Scholar] [CrossRef]
- Bassam, A.; Santoyo, E.; Andaverde, J.; Hernández, J.A.; Espinoza-Ojeda, O.M. Estimation of static formation temperatures in geothermal wells by using an artificial neural network approach. Comput. Geosci. 2010, 36, 1191–1199. [Google Scholar] [CrossRef]
- Dowdle, W.L.; Cobb, W.M. Static Formation Temperature From Well Logs–An Empirical Method. J. Pet. Technol. 1975, 27, 1326–1330. [Google Scholar] [CrossRef]
- Brennand, A.W. A new method for the analysis of static formation temperature test. In Proceedings of the the 6th New Zealand Geothermal Workshop, Auckland, New Zealand, 7 November 1984. [Google Scholar]
- Kutasov, I.M.; Eppelbaum, L.V. A new method for determining the formation temperature from bottom-hole temperature logs. J. Pet. Gas Eng. 2010, 1, 1–8. [Google Scholar] [CrossRef]
- Leblanc, Y.; Pascoe, L.J.; Jones, F.W. The temperature stabilization of a borehole. Geophysics 1981, 46, 1301–1303. [Google Scholar] [CrossRef]
- Manetti, G. Attainment of temperature equilibrium in holes during drilling. Geothermics 1973, 2, 94–100. [Google Scholar] [CrossRef]
- Ascencio, F.; García, A.; Rivera, J.; Arellano, V. Estimation of undisturbed formation temperatures under spherical-radial heat flow conditions. Geothermics 1994, 23, 317–326. [Google Scholar] [CrossRef]
- Hasan, A.R.; Kabir, C.S. Static Reservoir Temperature Determination from Transient Data after Mud Circulation. SPE Drill. Complet. 1994, 9, 17–24. [Google Scholar] [CrossRef]
- Al-Fakih, A.; Kaka, S. Application of Artificial Intelligence in Static Formation Temperature Estimation. Arab. J. Sci. Eng. 2023, 48, 16791–16804. [Google Scholar] [CrossRef]
- Espinosa-Paredes, G.; Morales-Díaz, A.; Olea-González, U.; Ambriz-Garcia, J.J. Application of a proportional-integral control for the estimation of static formation temperatures in oil wells. Mar. Pet. Geol. 2009, 26, 259–268. [Google Scholar] [CrossRef]
- Yang, M.; Tang, D.; Chen, Y.; Li, G.; Zhang, X.; Meng, Y. Determining initial formation temperature considering radial temperature gradient and axial thermal conduction of the wellbore fluid. Appl. Therm. Eng. 2019, 147, 876–885. [Google Scholar] [CrossRef]
- Ibrahim, B.; Konduah, J.O.; Ahenkorah, I. Predicting reservoir temperature of geothermal systems in Western Anatolia, Turkey: A focus on predictive performance and explainability of machine learning models. Geothermics 2023, 112, 102727. [Google Scholar] [CrossRef]
- Varol Altay, E.; Gurgenc, E.; Altay, O.; Dikici, A. Hybrid artificial neural network based on a metaheuristic optimization algorithm for the prediction of reservoir temperature using hydrogeochemical data of different geothermal areas in Anatolia (Turkey). Geothermics 2022, 104, 102476. [Google Scholar] [CrossRef]
- Tut Haklidir, F.S.; Haklidir, M. Prediction of Reservoir Temperatures Using Hydrogeochemical Data, Western Anatolia Geothermal Systems (Turkey): A machine learning approach. Nat. Resour. Res. 2020, 29, 2333–2346. [Google Scholar] [CrossRef]
- Haklidir, F.T. Hydrogeochemical evaluation of thermal, mineral and cold waters between Bursa city and Mount Uludağ in the South Marmara region of Turkey. Geothermics 2013, 48, 132–145. [Google Scholar] [CrossRef]
- Yang, F.; Zhu, R.; Zhou, X.; Zhan, T.; Wang, X.; Dong, J.; Liu, L.; Ma, Y.; Su, Y. Artificial neural network based prediction of reservoir temperature: A case study of Lindian geothermal field, Songliao Basin, NE China. Geothermics 2022, 106, 102547. [Google Scholar] [CrossRef]
- Pérez-Zárate, D.; Santoyo, E.; Acevedo-Anicasio, A.; Díaz-González, L.; García-López, C. Evaluation of artificial neural networks for the prediction of deep reservoir temperatures using the gas-phase composition of geothermal fluids. Comput. Geosci. 2019, 129, 49–68. [Google Scholar] [CrossRef]
- Shahdi, A.; Lee, S.; Karpatne, A.; Nojabaei, B. Exploratory analysis of machine learning methods in predicting subsurface temperature and geothermal gradient of Northeastern United States. Geotherm. Energy 2021, 9, 18. [Google Scholar] [CrossRef]
- Okoroafor, E.R.; Smith, C.M.; Ochie, K.I.; Nwosu, C.J.; Gudmundsdottir, H.; Aljubran, M. Machine learning in subsurface geothermal energy: Two decades in review. Geothermics 2022, 102, 102401. [Google Scholar] [CrossRef]
- Falah, A.N.; Andriyana, Y.; Ruchjana, B.N.; Hermawan, E.; Harjana, T.; Maryadi, E.; Risyanto; Satyawardhana, H.; Sipayung, S.B. An Expanded Spatial Durbin Model with Ordinary Kriging of Unobserved Big Climate Data. Mathematics 2024, 12, 2447. [Google Scholar] [CrossRef]
- Shanmugam, N.S.; Chen, S.-E.; Tang, W.; Chavan, V.S.; Diemer, J.; Allan, C.; Shukla, T.; Chen, T.; Slocum, Z.; Janardhanam, R. Spatial Interpolation of Bridge Scour Point Cloud Data Using Ordinary Kriging Method. J. Perform. Constr. Facil. 2025, 39, 06024002. [Google Scholar] [CrossRef]
- Gu, Y.; Rühaak, W.; Bär, K.; Sass, I. Using seismic data to estimate the spatial distribution of rock thermal conductivity at reservoir scale. Geothermics 2017, 66, 61–72. [Google Scholar] [CrossRef]
- Jeong, K.; Hong, T.; Chae, M.; Kim, J.; Lee, M.; Koo, C.; Ji, C. Development of the hybrid model for estimating the undisturbed ground temperature using the finite element method and geostatistical technique. Energy Build. 2017, 152, 162–174. [Google Scholar] [CrossRef]
- Che, D.; Jia, Q. Three-Dimensional Geological Modeling of Coal Seams Using Weighted Kriging Method and Multi-Source Data. IEEE Access 2019, 7, 118037–118045. [Google Scholar] [CrossRef]
- Su, F.-Q.; Yang, J.-N.; He, X.-L.; Dai, M.-J.; Hamanaka, A.; He, Y.Y.; Li, W.; Li, J.-Y. Influences of removable gas injection methods on the temperature field and gas composition of the underground coal gasification process. Fuel 2024, 363, 130953. [Google Scholar] [CrossRef]
- Agemar, T.; Schellschmidt, R.; Schulz, R. Subsurface temperature distribution in Germany. Geothermics 2012, 44, 65–77. [Google Scholar] [CrossRef]
- Sepúlveda, F.; Rosenberg, M.D.; Rowland, J.V.; Simmons, S.F. Kriging predictions of drill-hole stratigraphy and temperature data from the Wairakei geothermal field, New Zealand: Implications for conceptual modeling. Geothermics 2012, 42, 13–31. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Zone | Well Number | SFT Data Point Number | ) | ) | ) | ) | Max. SFT (°C) | Min. SFT (°C) |
|---|---|---|---|---|---|---|---|---|
| #1 | 34 | 1,379,981 | 8750.13 | 7271.00 | 8240.70 | 7270.72 | 163.89 | 139.54 |
| #2 | 26 | 1,237,893 | 8996.75 | 6977.63 | 8434.68 | 6977.63 | 180.79 | 138.29 |
| #3 | 29 | 1,284,782 | 8799.00 | 7364.05 | 8223.88 | 7364.05 | 178.72 | 134.95 |
| #4 | 8 | 385,669 | 8959.38 | 7679.50 | 8473.30 | 7679.50 | 180.19 | 155.37 |
| #5 | 16 | 881,914 | 9272.50 | 8049.05 | 8915.93 | 7863.50 | 199.06 | 164.43 |
| Total | 113 | 5,170,239 | 9272.50 | 6977.63 | 8915.93 | 6977.63 | 199.06 | 134.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Jia, W.; Xu, Z.; Tian, T.; Chen, Y. Trajectory-Integrated Kriging Prediction of Static Formation Temperature for Ultra-Deep Well Drilling. Processes 2025, 13, 2303. https://doi.org/10.3390/pr13072303
Wang Q, Jia W, Xu Z, Tian T, Chen Y. Trajectory-Integrated Kriging Prediction of Static Formation Temperature for Ultra-Deep Well Drilling. Processes. 2025; 13(7):2303. https://doi.org/10.3390/pr13072303
Chicago/Turabian StyleWang, Qingchen, Wenjie Jia, Zhengming Xu, Tian Tian, and Yuxi Chen. 2025. "Trajectory-Integrated Kriging Prediction of Static Formation Temperature for Ultra-Deep Well Drilling" Processes 13, no. 7: 2303. https://doi.org/10.3390/pr13072303
APA StyleWang, Q., Jia, W., Xu, Z., Tian, T., & Chen, Y. (2025). Trajectory-Integrated Kriging Prediction of Static Formation Temperature for Ultra-Deep Well Drilling. Processes, 13(7), 2303. https://doi.org/10.3390/pr13072303