A Novel Docking System for Modular Self-Reconfigurable Robots


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Module Design and Docking Process
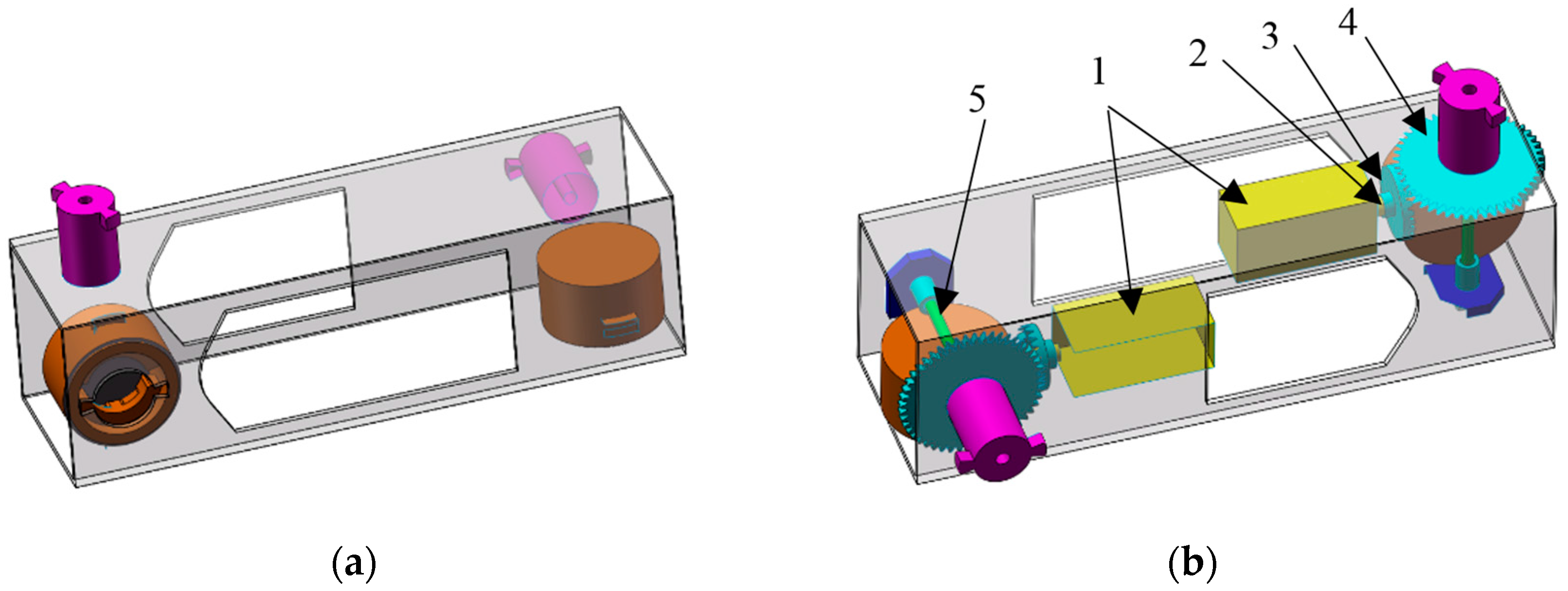
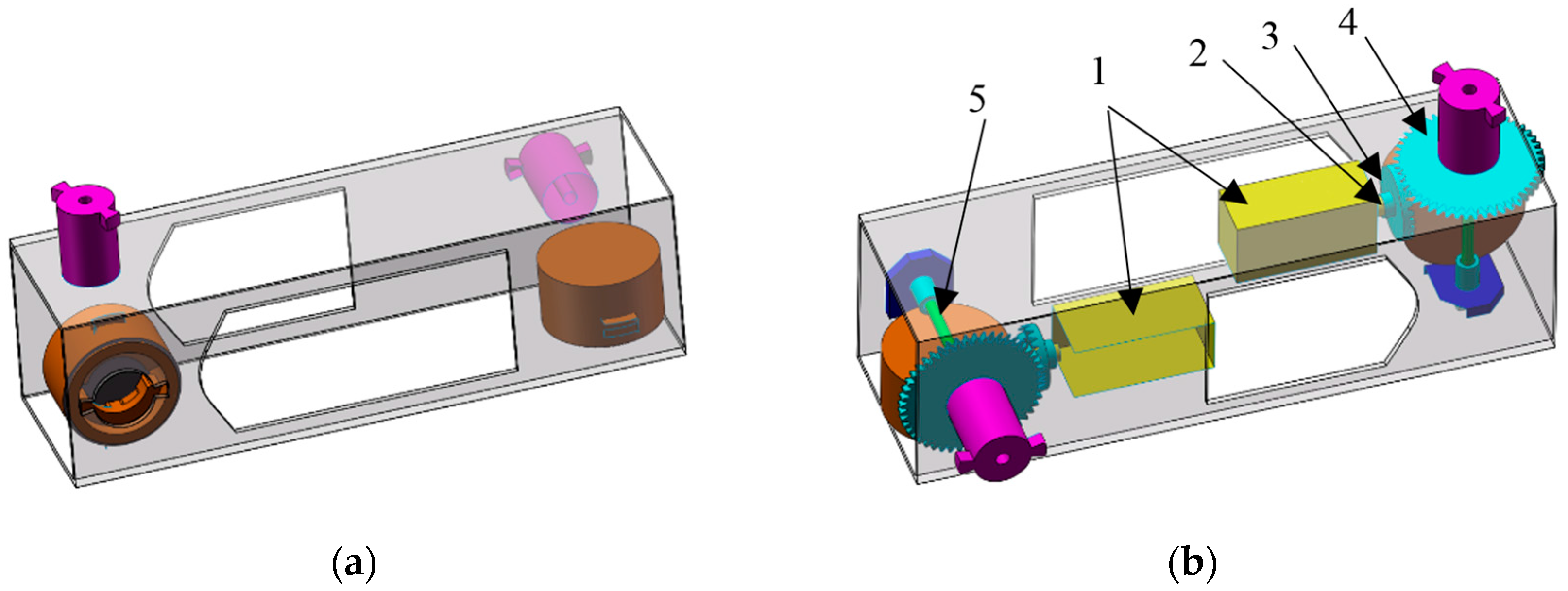
2.1. Module Design
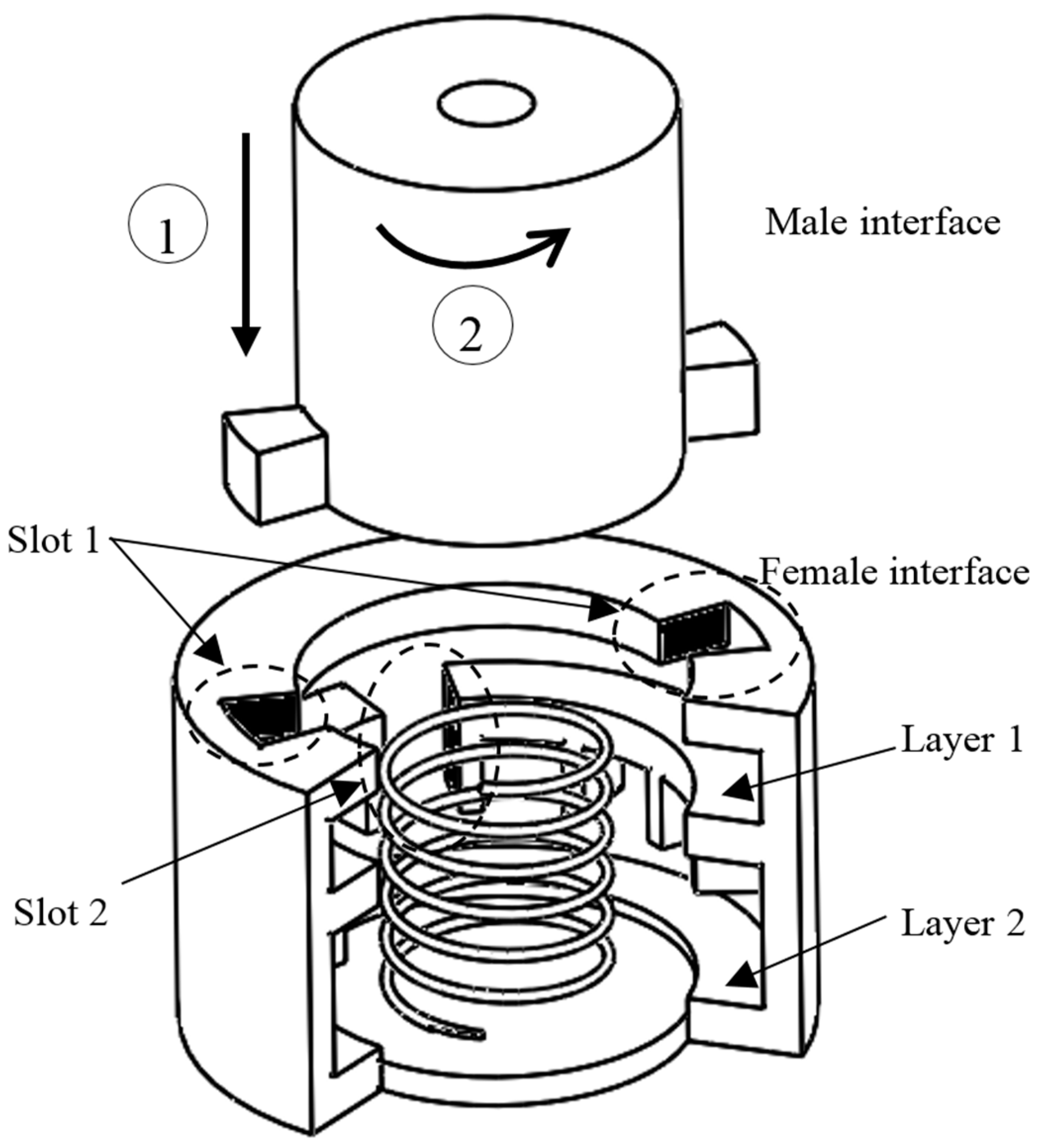
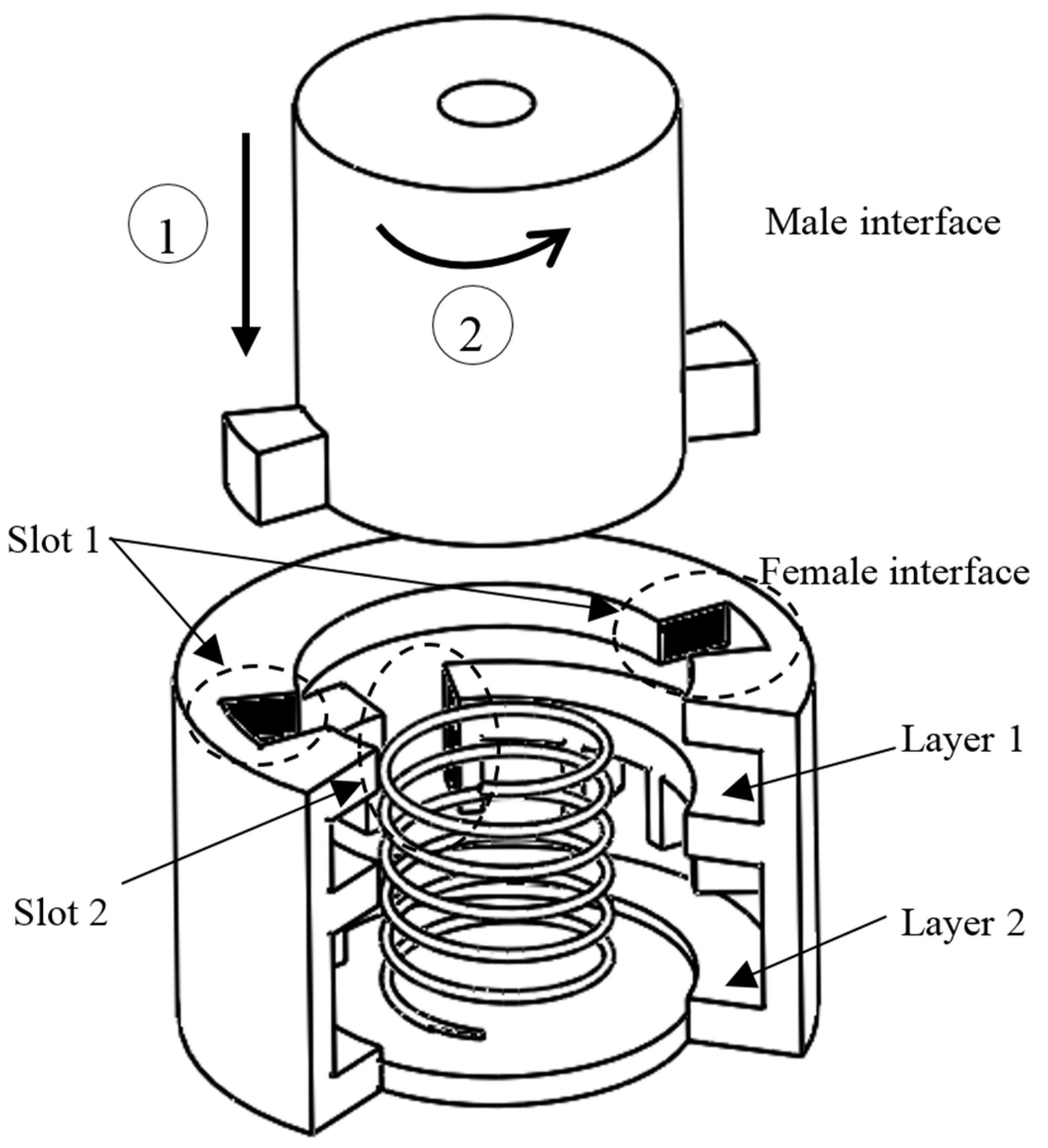
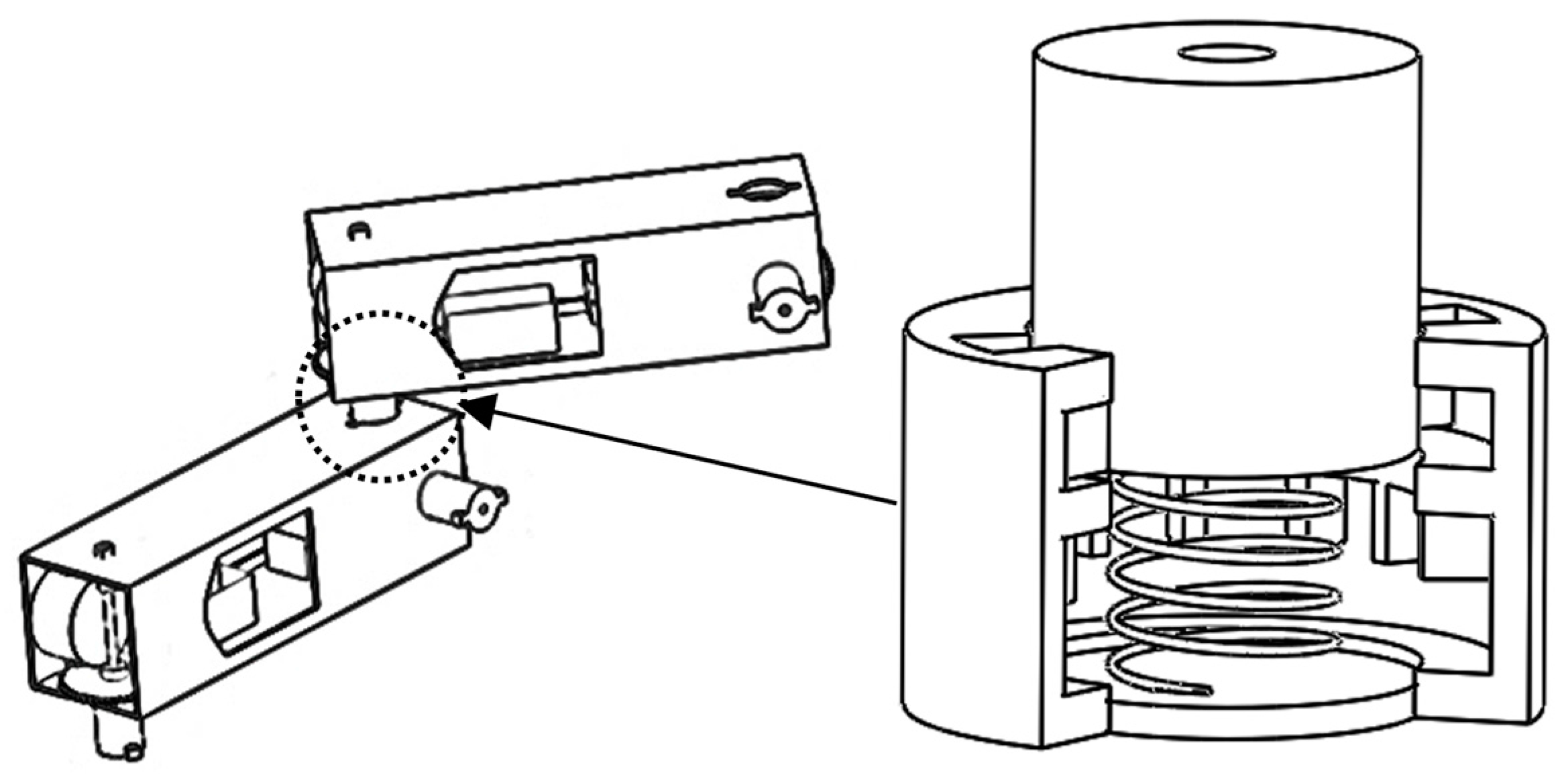
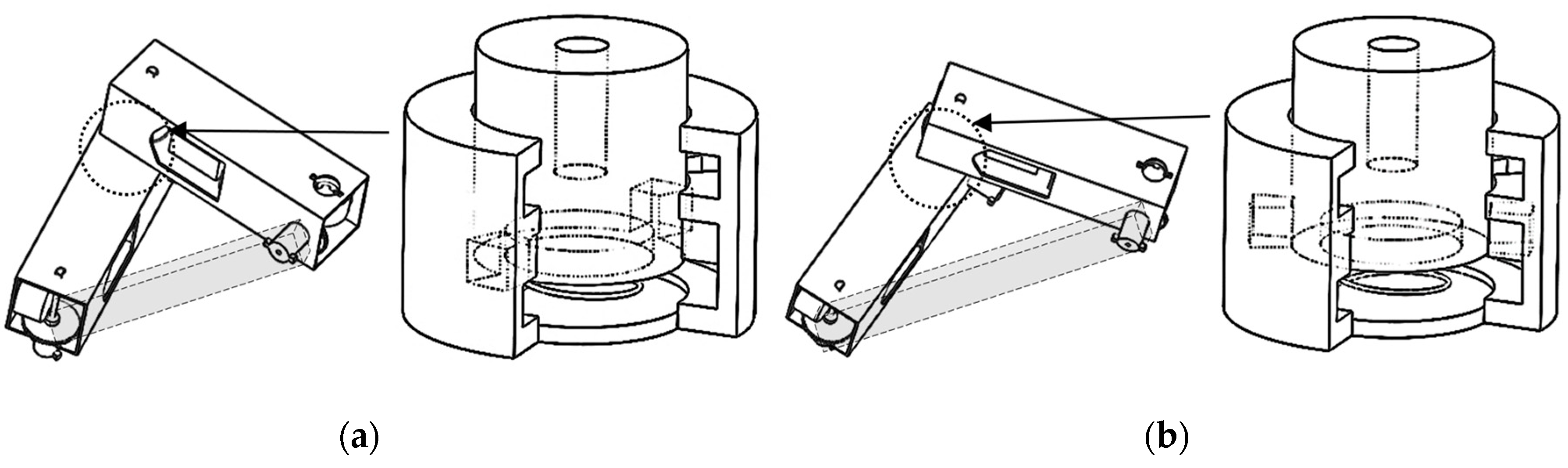
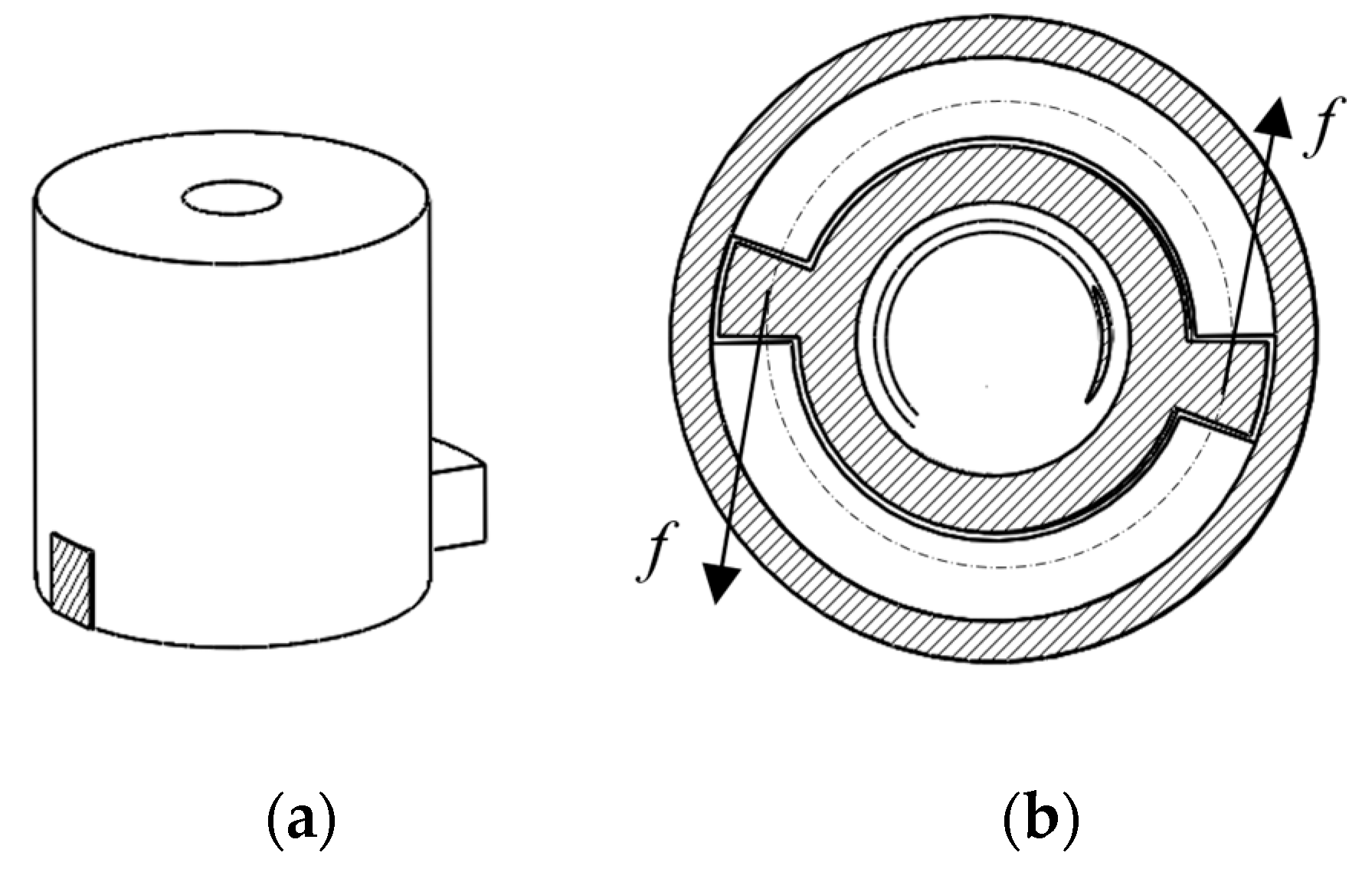
2.2. Docking System
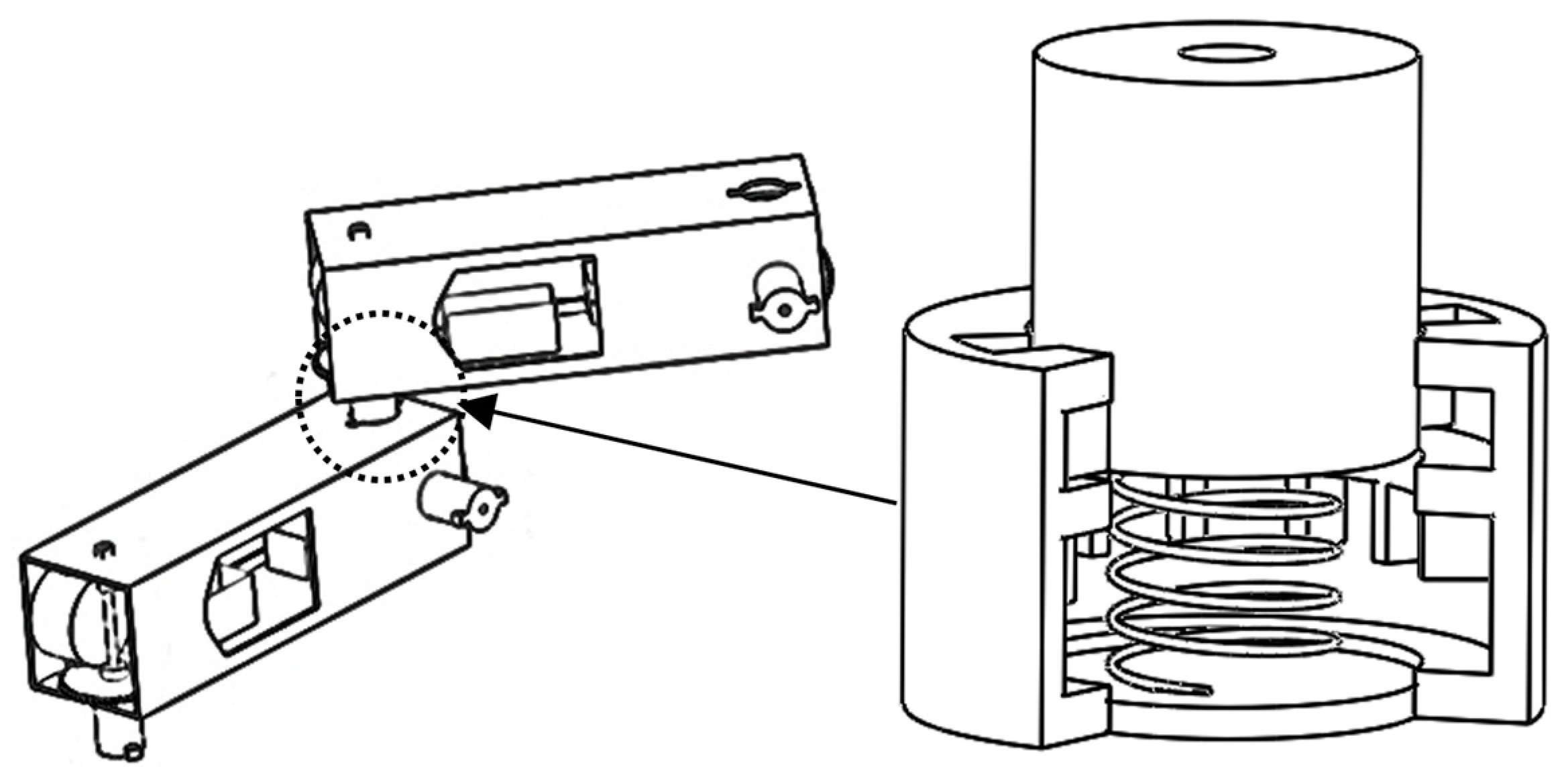
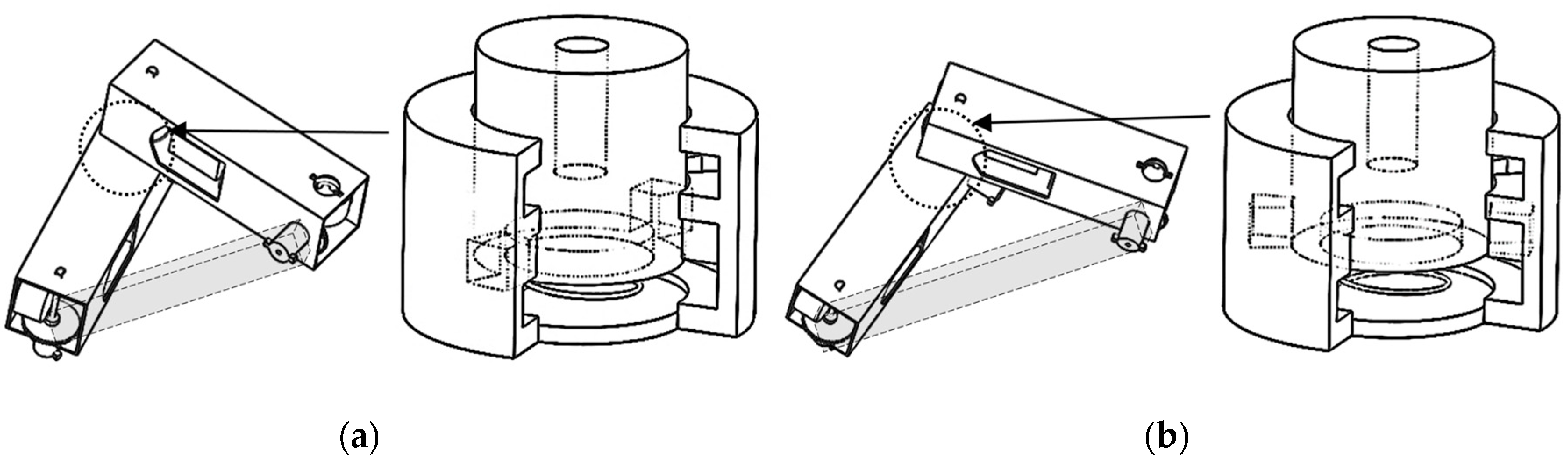
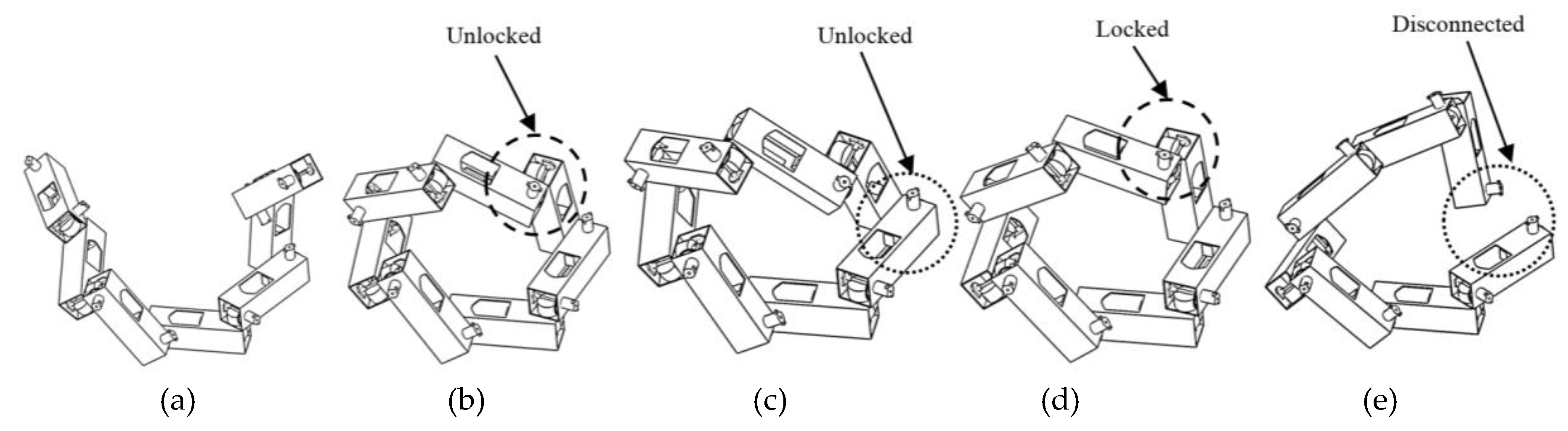
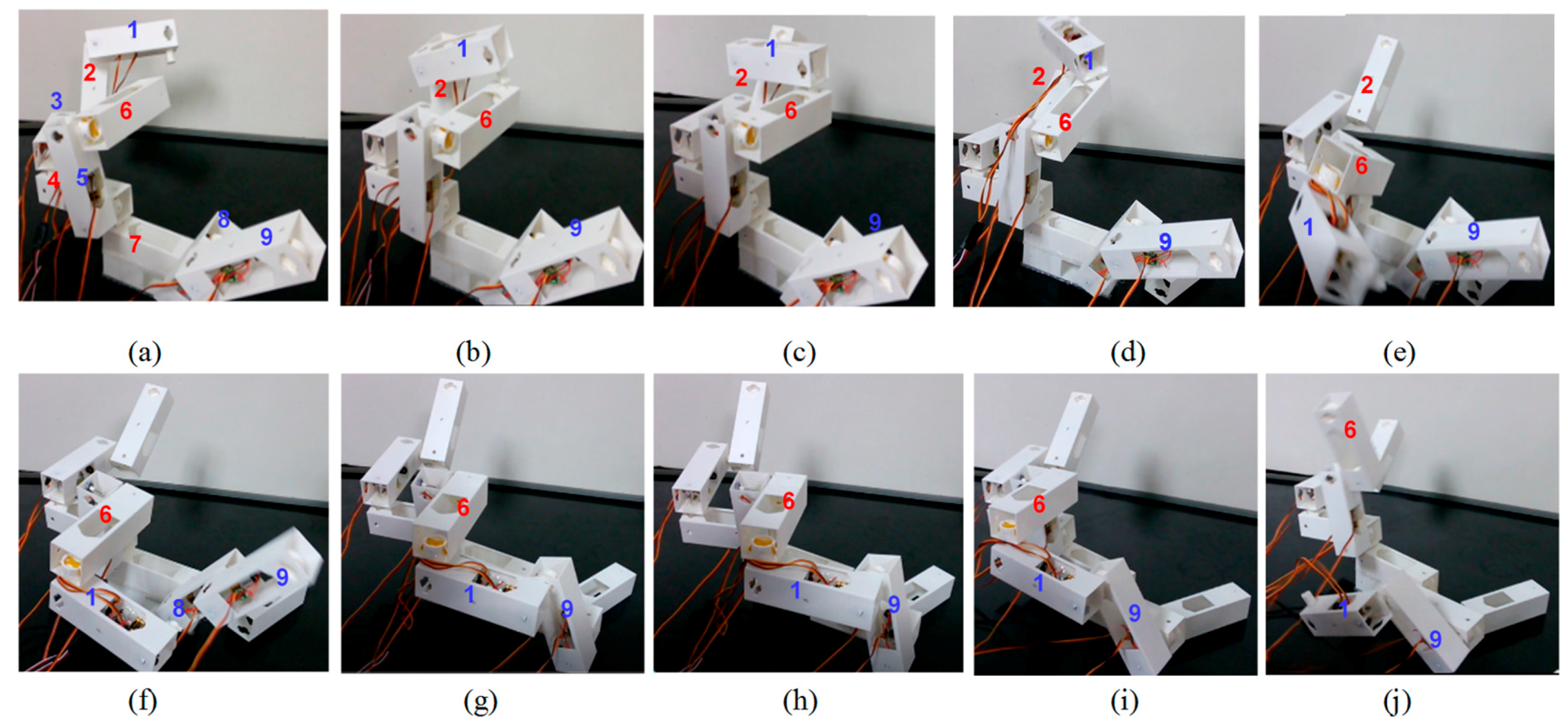
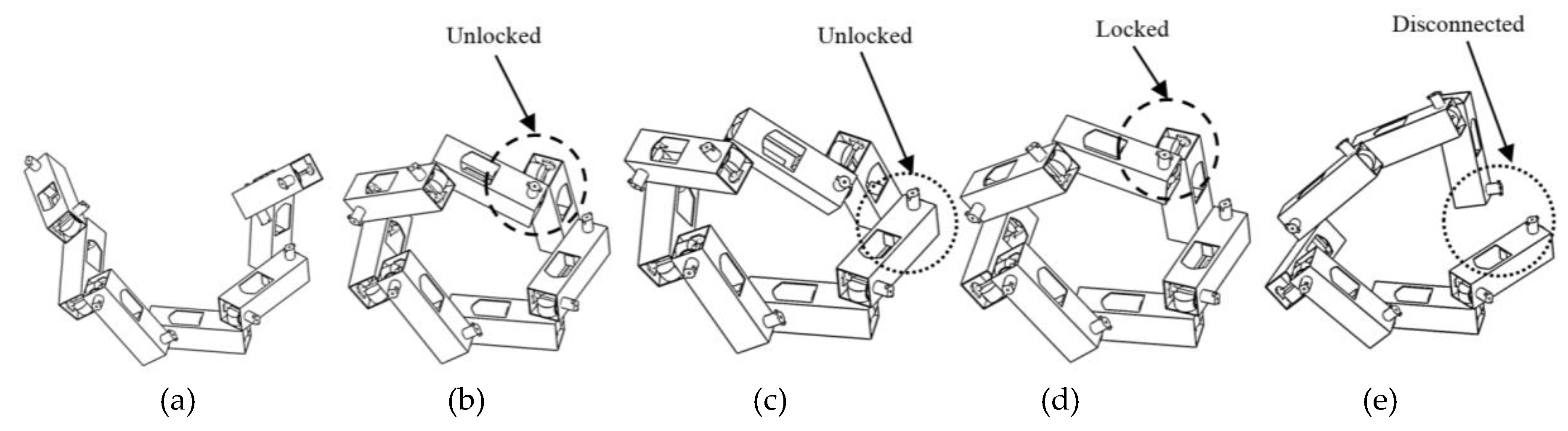
2.3. Docking Process
- An underactuated self-reconfigurable robot consists of two types of modules: joints and links. Further, joints are divided into active joints and passive joints. A link is formed by two modules with a fixed connection.
- The active and passive modules are the fundamental parts, and they are not disassembled.
- robot changes its configuration through a serial of docking actions between two modules, i.e., locking (forming a fixed connection) and unlocking (forming a passive joint), and disconnection (separation).
- The male interfaces of active modules provide actuation for both locomotion and reconfiguration.
- Docking and undocking need both linear and rotation motions and are driven by active modules in a closed-loop chain. If the male interface module is active, the rotation motion for docking can be driven by the male interface directly.
- (1)
- Two branches are connected to form a closed-loop chain, and the junction forms a passive joint.
- (2)
- One connection of the two modules that will be separate in the next step is unlocked and become a passive joint. As needed, the fixed connection can be switched to passive joints to increase the DOF of the chain.
- (3)
- The connection in step (1) is locked.
- (4)
- The passive joint formed in step (2) is disconnected.
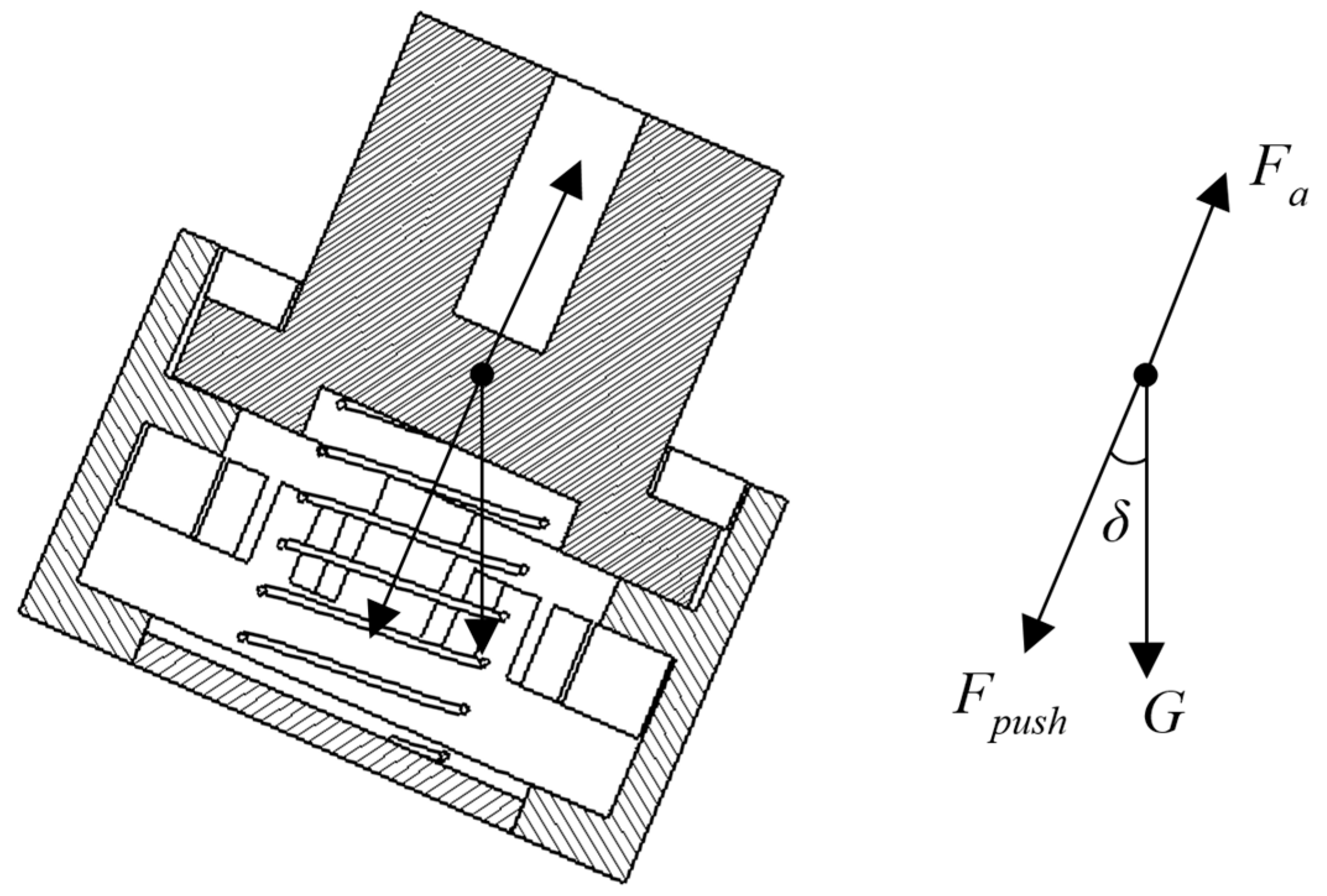
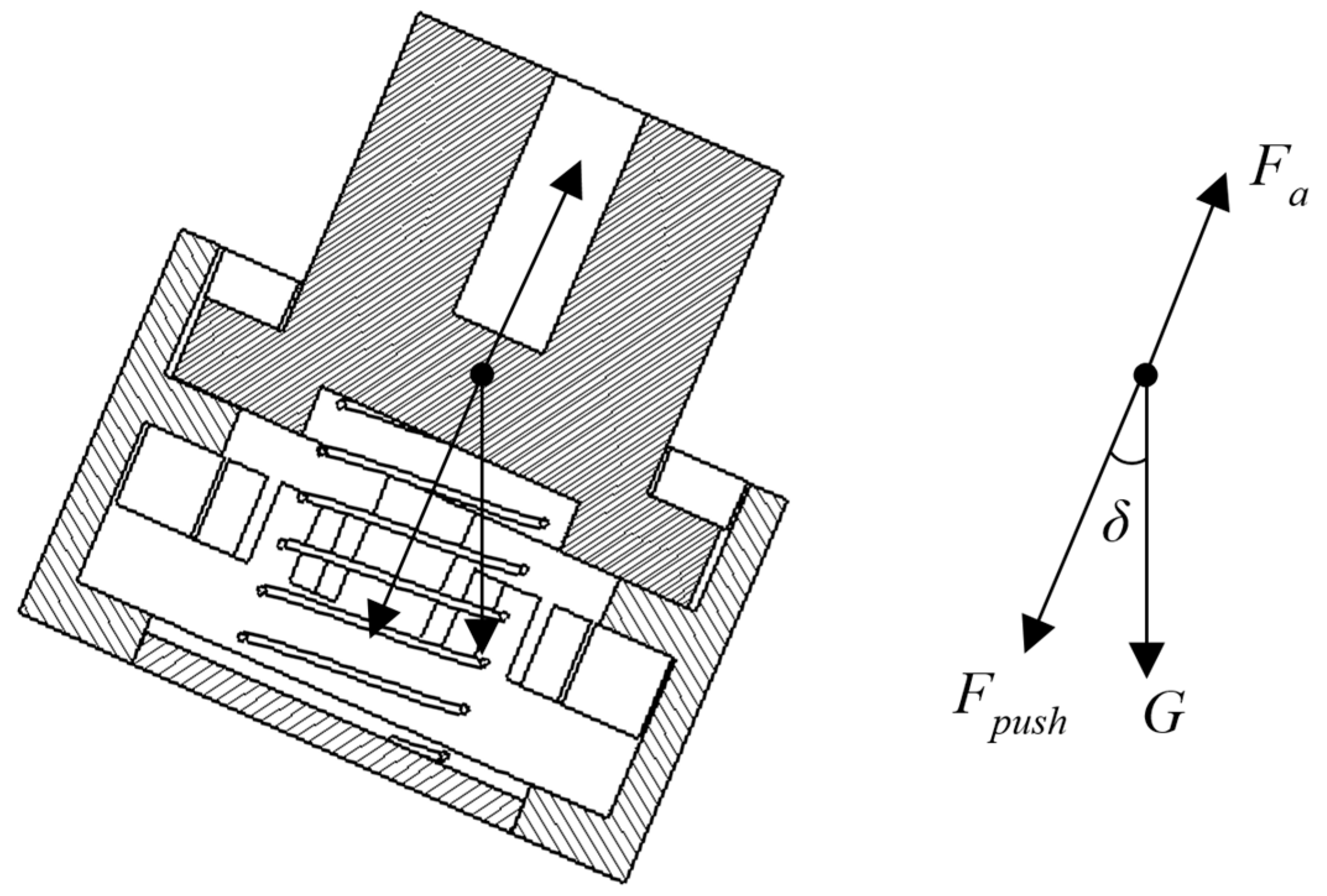
3. Docking Force
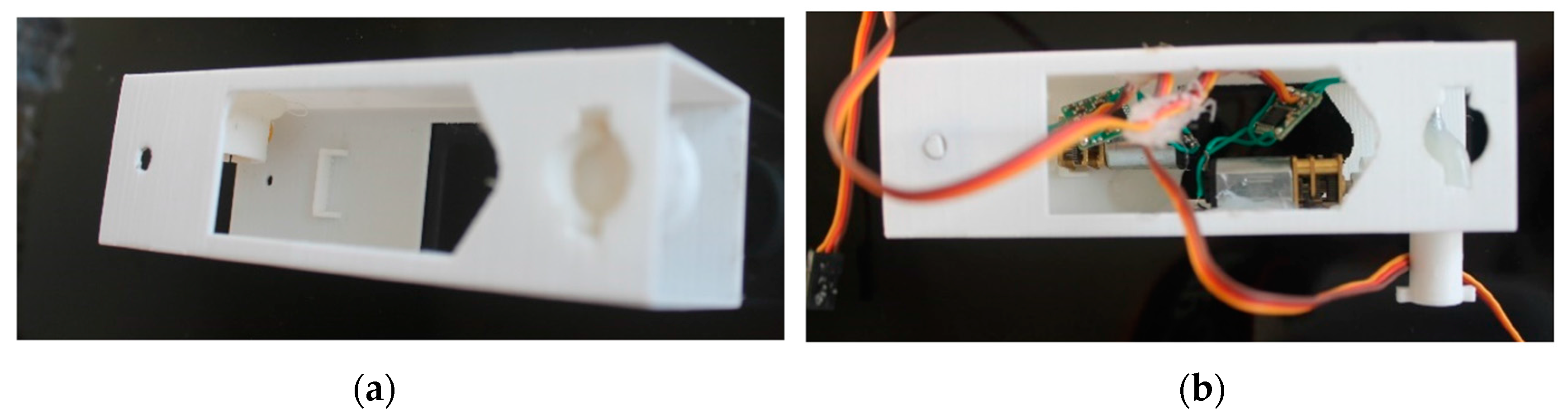
4. Hardware Implementation
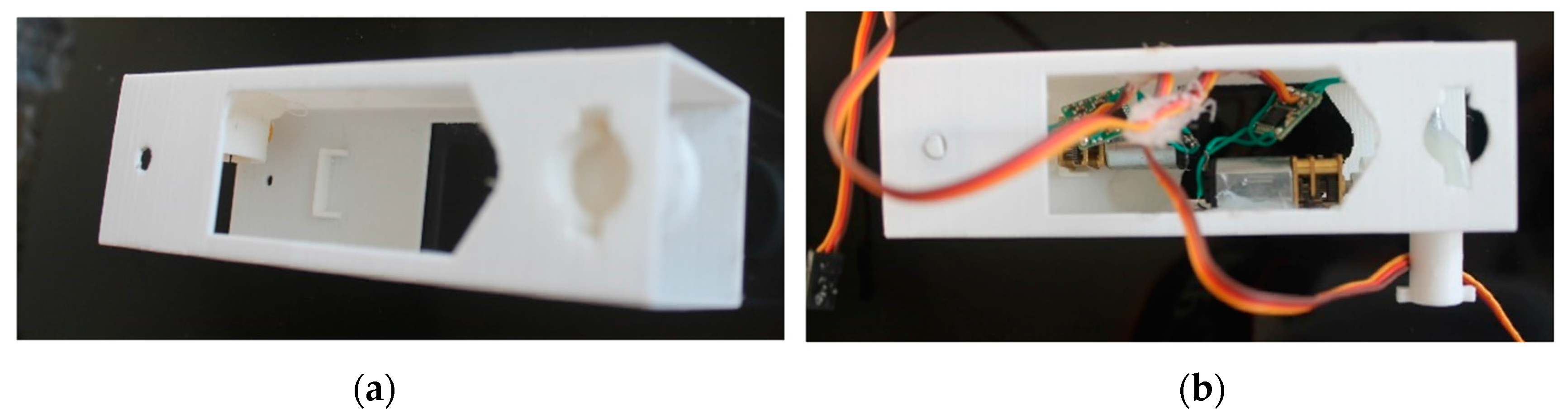
4.1. Hardware
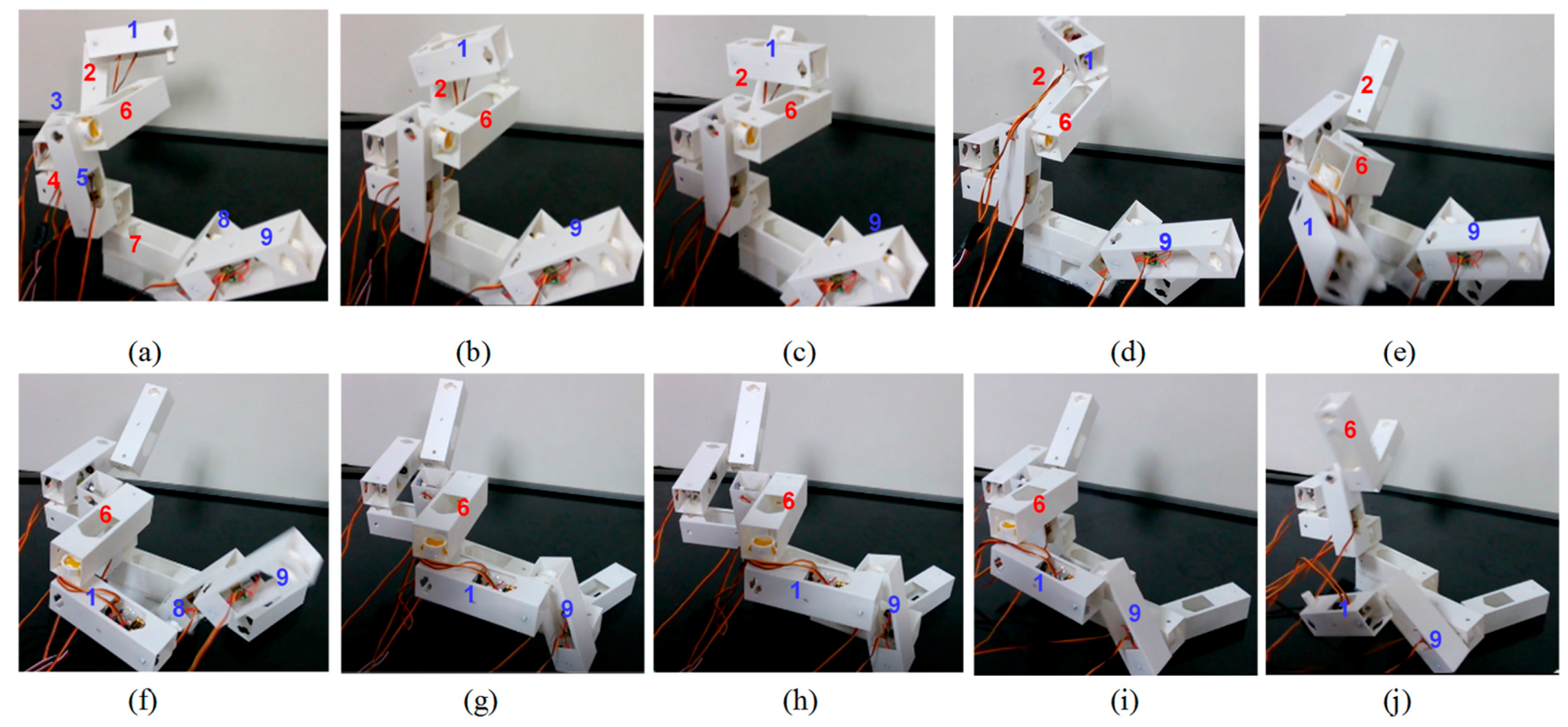
4.2. Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yim, M.; Shen, W.M.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H. Modular self-reconfigurable robot systems—Challenges and opportunities for the future. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Yim, M.; Zhang, Y.; Roufas, K.; Duff, D.; Eldershaw, C. Connecting and disconnecting for chain self-reconfiguration with PolyBot. IEEE ASME Trans. Mechatron. 2002, 7, 442–451. [Google Scholar] [CrossRef]
- Castano, A.; Shen, W.M.; Will, P. CONRO: Towards Deployable Robots with Inter-Robots Metamorphic Capabilities. Auton. Robots 2000, 8, 309–324. [Google Scholar] [CrossRef]
- Kurokawa, H.; Tomita, K.; Kamimura, A.; Kokaji, S.; Hasuo, T.; Murata, S. Distributed self-reconfiguration of M-TRAN III modular robotic system. Int. J. Robot. Res. 2008, 27, 373–386. [Google Scholar] [CrossRef]
- Zykov, V.; Mytilinaios, E.; Adams, B.; Lipson, H. Self-reproducing machines. Nature 2005, 435, 163–164. [Google Scholar] [CrossRef] [PubMed]
- Gilpin, K.; Kotay, K.; Rus, D.; Vasilescu, I. Miche: Modular shape formation by self-disassembly. Int. J. Robot. Res. 2008, 27, 345–372. [Google Scholar] [CrossRef]
- Chennareddy, S.; Agrawal, A.; Karuppiah, A. Modular Self-Reconfigurable Robotic Systems: A Survey on Hardware Architectures. J. Robot. 2017, 2017. [Google Scholar] [CrossRef]
- Garcia, R.; Stoy, K. The Odin Modular Robot: Electronics and Communication. Master’s Thesis, The Maersk Mc-Kinney Moller Institute, University of Southern Denmark, Odense, Denmark, 2008. [Google Scholar]
- Ünsal, C.; Kiliççöte, H.; Khosla, P.K. A modular self-reconfigurable bipartite robotic system: Implementation and motion planning. Auton. Robots 2001, 10, 23–40. [Google Scholar] [CrossRef]
- Yu, C.H.; Haller, K.; Ingber, D.; Nagpal, R. Morpho: A self-deformable modular robot inspired by cellular structure. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3571–3578. [Google Scholar]
- Støy, K.; Brandt, D.; Christensen, D.J. Self-Reconfigurable Robots: An Introduction; MIT Press: Cambridge, MA, USA, 2010. [Google Scholar]
- Plooij, M.; Mathijssen, G.; Cherelle, P.; Lefeber, D.; Vanderborght, B. Lock your robot: A review of locking devices in robotics. IEEE Robot. Autom. Mag. 2015, 22, 106–117. [Google Scholar] [CrossRef]
- Brunete, A.; Ranganath, A.; Segovia, S.; de Frutos, J.P.; Hernando, M.; Gambao, E. Current trends in reconfigurable modular robots design. Int. J. Adv. Robot. Syst. 2017, 14, 1–21. [Google Scholar] [CrossRef]
- Shen, W.M.; Will, P. Docking in self-reconfigurable robots. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 1049–1054. [Google Scholar]
- Rus, D.; Vona, M. Crystalline robots: Self-reconfiguration with compressible unit modules. Auton. Robots 2001, 10, 107–124. [Google Scholar] [CrossRef]
- Unsal, C.; Khosla, P. Mechatronic design of a modular self-reconfiguring robotic system. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 1742–1747. [Google Scholar]
- Ostergaard, E.H.; Kassow, K.; Beck, R.; Lund, H.H. Design of the ATRON lattice-based self-reconfigurable robot. Auton. Robots 2006, 21, 165–183. [Google Scholar] [CrossRef]
- Murata, S.; Yoshida, E.; Kamimura, A.; Kurokawa, H.; Tomita, K.; Kokaji, S. M-TRAN: Self-reconfigurable modular robotic system. IEEE ASME Trans. Mechatron. 2002, 7, 431–441. [Google Scholar] [CrossRef]
- Davey, J.; Kwok, N.; Yim, M. Emulating self-reconfigurable robots-design of the SMORES system. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 4464–4469. [Google Scholar]
- Zhang, T.; Zhang, D.; Gupta, M.M.; Zhang, W.J. Design of a General Resilient Robotic System Based on Axiomatic Design Theory. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, South Korea, 7–11 July 2015; pp. 71–78. [Google Scholar]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Zhang, W.; Gupta, M.M. A Novel Docking System for Modular Self-Reconfigurable Robots. Robotics 2017, 6, 25. https://doi.org/10.3390/robotics6040025
Zhang T, Zhang W, Gupta MM. A Novel Docking System for Modular Self-Reconfigurable Robots. Robotics. 2017; 6(4):25. https://doi.org/10.3390/robotics6040025
Chicago/Turabian StyleZhang, Tan, Wenjun Zhang, and Madan M. Gupta. 2017. "A Novel Docking System for Modular Self-Reconfigurable Robots" Robotics 6, no. 4: 25. https://doi.org/10.3390/robotics6040025
APA StyleZhang, T., Zhang, W., & Gupta, M. M. (2017). A Novel Docking System for Modular Self-Reconfigurable Robots. Robotics, 6(4), 25. https://doi.org/10.3390/robotics6040025