1. Introduction
Unlike heat, electricity is an organized form of energy; thus, the storage of energy in the form of electricity has a higher potential for exploitation compared to many other forms of storage, including in the form of chemical energy [
1]. When it flows through a circuit, electricity produces heat and other forms of energy. This energy transfer is accompanied by an increase in entropy, as the electrical energy is transformed into other forms of energy, which are less organized and more disordered [
2]. At the same time, the transportation of electrical energy has seen major advances [
3], with global power grids emerging as the dominant form of energy supply today.
The ensemble of global power networks is a complex one, but it benefits from a number of major advantages, such as the working regime of consumers (industrial and domestic) being regularized by the diurnal cycle [
4]. The diurnal cycle is also regulated by its smallest entity, part of an electricity production network, i.e., photovoltaics (PV), which are referred to in this work, by virtue of their light source [
5].
One of the advantages of the large-scale proliferation of PV from high-power producers to consumers—which, through the use of photovoltaic panel systems—are also small producers, is that it brings the source closer to the consumer, thus eliminating at least some of the transport losses [
6,
7,
8]. The ideal is, of course, for each of these consumers to be able to cover their energy needs from their own sources, and photovoltaic cell systems represent the most appropriate solution, since, in addition to the other arguments, they offer very good coverage of the working regime of the consumers in the immediate vicinity, i.e., during the day. However, this is not (yet) possible for all instances; thus, the integration of small-scale electricity production systems into global electricity networks is a priority [
9,
10,
11].
One of the problems to be addressed regarding the integration of PV cells in complex systems and networks is the estimation of their working regime—in other words, their current vs. voltage response, also known as their characteristic equation [
12,
13,
14].
From the start, it should be stated that there are many types of PV units [
15,
16,
17], and there is not one model that is considered a universal solution. Even if there were only one type of PV unit, the model would probably still not be universal. There are (small) intrinsic variations in their operating parameters due to the technological process, quality (purity), and specificity (microcomposition) of the materials used [
18,
19,
20,
21].
An analytical solution for the current flow through a diode [
22] and PV [
23] may serve to derive accurate expressions for solar cell fill factors [
24]. Even so, there are a number of models that approximate the behavior of PV cells based on the behavior of an idealized system consisting of a series of active and passive components (see the
Single Diode, Double Diode and PV Generators Models section in [
25] and references therein). Unfortunately, this model is not at all simple; it has an analytical expression, but the function that expresses the value of voltage as a function of current is accessible only by numerical means, only providing the value of the available current and requiring a series of repeated numerical evaluations (the same can be said of the function that expresses the value of current as a function of voltage). The classic approach involves the use of the Lambert function, providing voltage as a function of current (or vice versa), which is a mathematical formalization of the fact that the function expressing voltage as a function of current (or vice versa) requires a series of successive approximations, which are formalized by the same general framework defined by the equation and the associated function proposed by Lambert, i.e.,
(for further details, see the
Lambert Function section in [
25,
26]). An alternate approach is to use explicit equations approximating the voltage vs. current (or vice versa) dependence (see the
Explicit equations section in [
25]). Either way, the associated problem in this context is the correct and fast identification of model parameters—parameters that are usually constructional (depending on the construction of the PV cell) and which may also depend on the working regime (temperature and solar radiation spectrum).
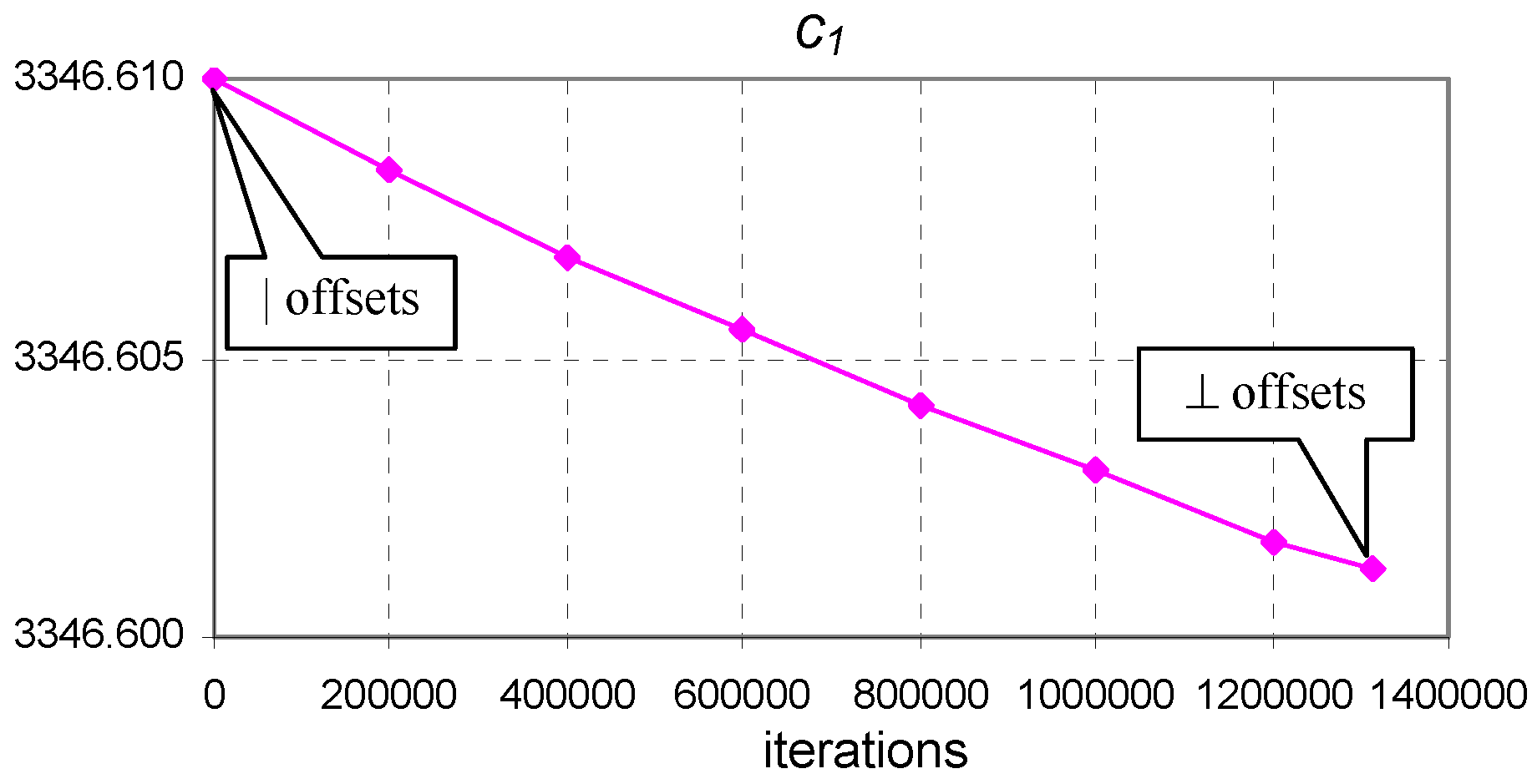
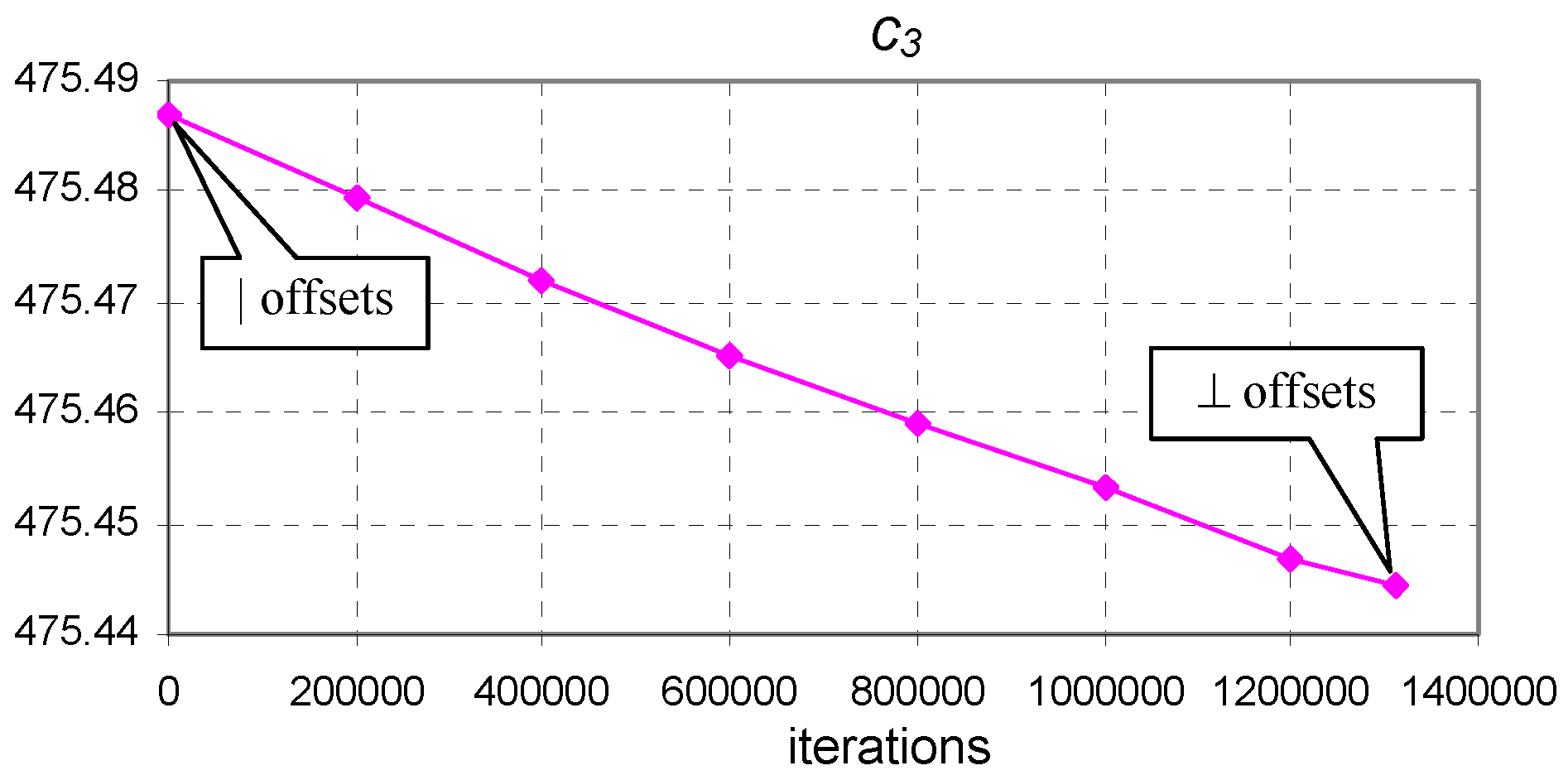
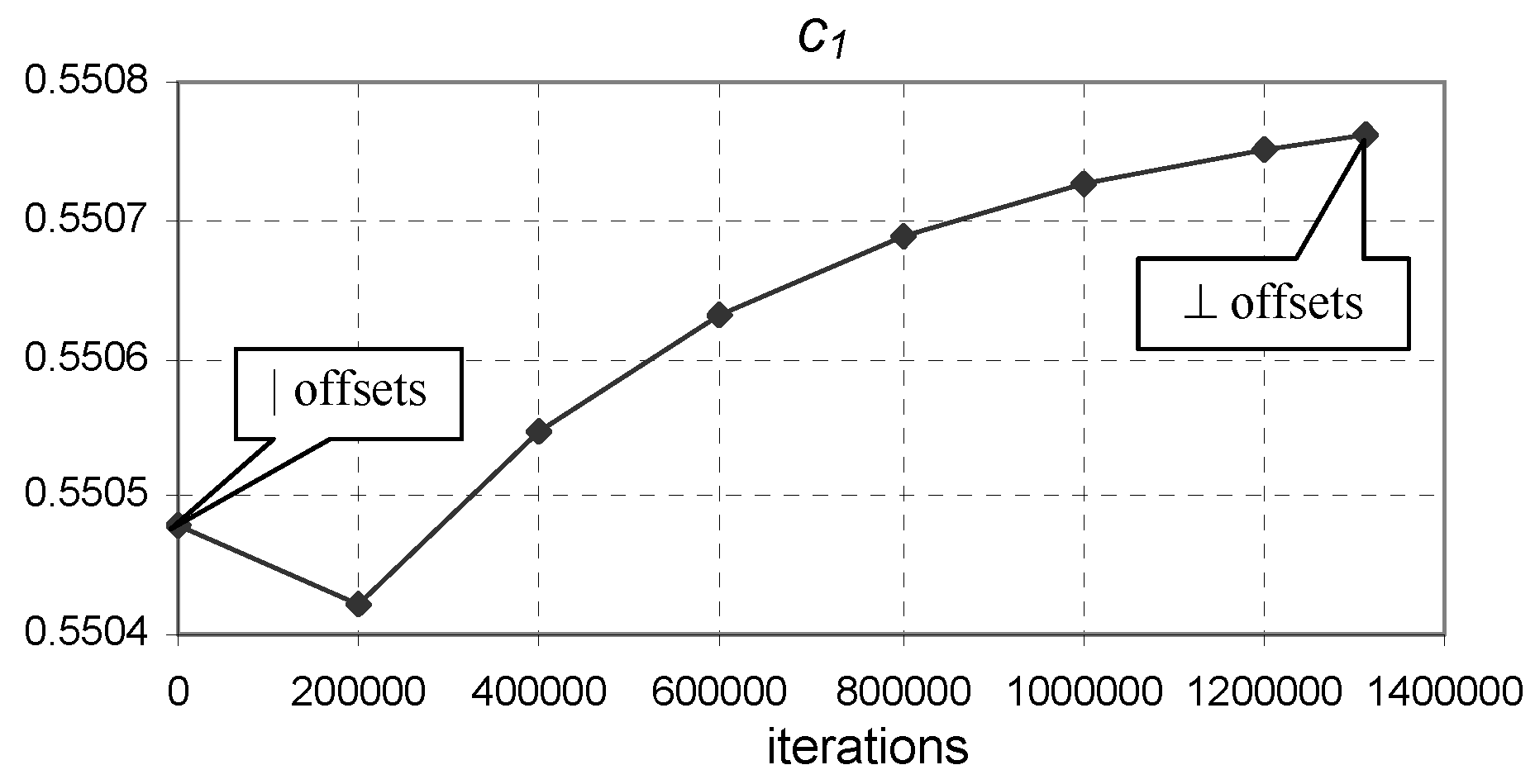
The classic method adopted by the implementations in use is to identify the regression parameters using a construction that fixes the experimental error on only one of the variables, namely that for which the value of the nonlinear function is expressed and which is positioned on the vertical axis in the representation (vertical offsets). The alternative route considers the offsets to be perpendicular, assuming that both paired observations are affected by the error [
25,
27,
28].
With respect to the classical approaches, particle swarm optimization is a very well-established and powerful population-based metaheuristic for parameter estimation of PV cells and modules; a series of studies have addressed this issue in depth [
29,
30,
31,
32,
33,
34].
In [
25], the full approach of perpendicular offsets was employed to identify the parameters for two nonlinear regressions. The perpendicular offsets approach achieves correct physical meaning by minimizing experimental errors of both a voltmeter and ammeter against the classical vertical offsets approach, which minimizes only one series of errors, the others being considered to correspond to true values. However, the use of perpendicular offsets instead of vertical offsets creates another issue: the problem of parameter identification is not a simple problem of nonlinear optimization anymore but an embedded nonlinear optimization inside another nonlinear optimization (see Algorithms 1 to 3 in [
25]). In this case, a simplified approach is proposed, which accelerates the convergence to the optimum values of the parameters. For the sake of comparison, the same data and the same models are used. Two additional datasets reported in the literature were also subjected to the same analysis here.
2. Materials and Methods
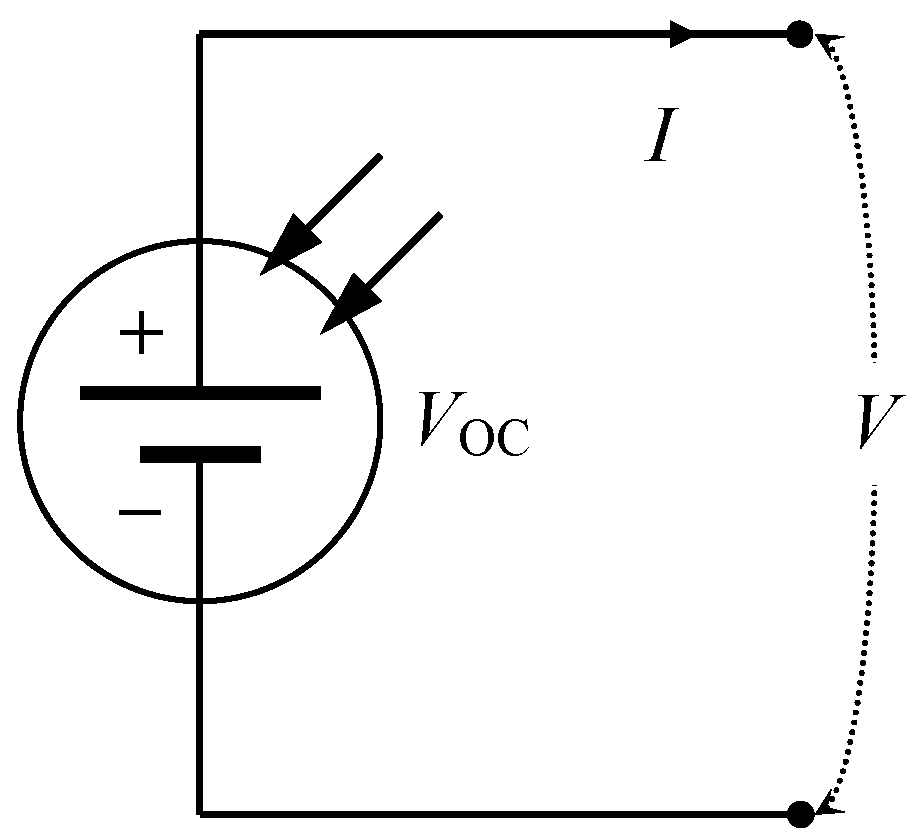
A data series used in this study are presented in Table 1 of [
25] representing a series of current vs. voltage paired measurements taken for a PV cell (
Figure 1).
In a plot of current (I) as a univariate function (generically written as , explicitly expressing some general parameter’s (c) current as a function of voltage) of voltage (V), vertical offsets have units of amperes (A, or multiples/submultiples thereof, as the case may be), while horizontal offsets have units of volts (V, or multiples/submultiples thereof, as the case may be). One is translated into another by resistance () and/or conductance (). Using the same units (either A or V), oblique offsets also have meaning.
The tangent is expressed as Equation (
1).
Equation (
1) is the equation of the tangent to
in
(
is the ordinate position of the contact point between the tangent and the curve), and
is the function derivative (
) (see
Figure 2).
The directions normal to the
curve (
Figure 2) is expressed as Equation (
2).
The contact point is
, and the normal direction intersects the observation point
, so (using Equation (
2)):
The numeric value of
can be obtained from Equation (
3) by root finding. With the value of
, the value of the perpendicular offset
is given in Equation (
4).
Alternately to the root finding in Equation (
3), in most cases (for smooth variations), it is enough to find the
for which
is minimum; this is the exact approach involving the use of perpendicular offsets used in [
25].
For each observed pair (
from a set of
n), the vertical offset is
, while the horizontal offset is
, such that the height (
) of a triangle with these two offsets as legs is expressed by Equation (
5).
This height (
, Equation (
5)) approximates (
,
Figure 3) the length of the perpendicular offset (
, Equation (
4).
In the proposed approach, (or ) is expressed as a nonlinear function of the parameters (c). Afterwards, these c values () can be determined by optimizing an objective function such as the sum of heights squares.
It should be noted that when the inverse of the function (
in Equation (
5)) is available and explicit, the use of Equation (
5) does not require root finding (solving of Equation (
3)) or minimization (of Equation (
4)). This is the main advantage of the proposed method, and the hope is that it will dramatically reduce the number of iterations until optimum values (accelerated convergence).
Let us set
with
from Equation (
5).
If Minimize() solves an optimization problem where g is the objective function to be minimized and c represents the unknown coefficients (to be found) on which the value of the objective function depends, then the iteration to the optimal values is as follows:
Optimization works by finding the adjustable parameters (c) for which is minimum.
When compared with the previous approach (Algorithms 1 to 3 in [
25]), in this case, the optimization problem is considerably simplified; an inner-loop optimization is no longer required. For the sake of comparison, the same software environment as that reported in [
25] was used for implementation.
Two cases were investigated as in [
25] here also (Equation (
7)):
with:
and
In Equations (
8) and (
9), the signs preceding the coefficients were conveniently chosen. The number of parameters (
m) is 4 for
and 3 for
(see Equations (
8) and (
9)).
The coefficients of are derived by assigning U to the vertical axis () and I to the horizontal axis (), while the coefficients of are derived by assigning I to the vertical axis () and U to the horizontal axis ().





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}