



Simulation-Based Optimization of Truck Appointment Systems in Container Terminals: A Dual Transactions Approach with Improved Congestion Factor Representation


Abstract
1. Introduction
2. Literature Review
3. Problem Description
4. Solution Methods
4.1. Case Description
4.2. Development of a CT Simulation Model
4.2.1. Justification for Modelling Technique
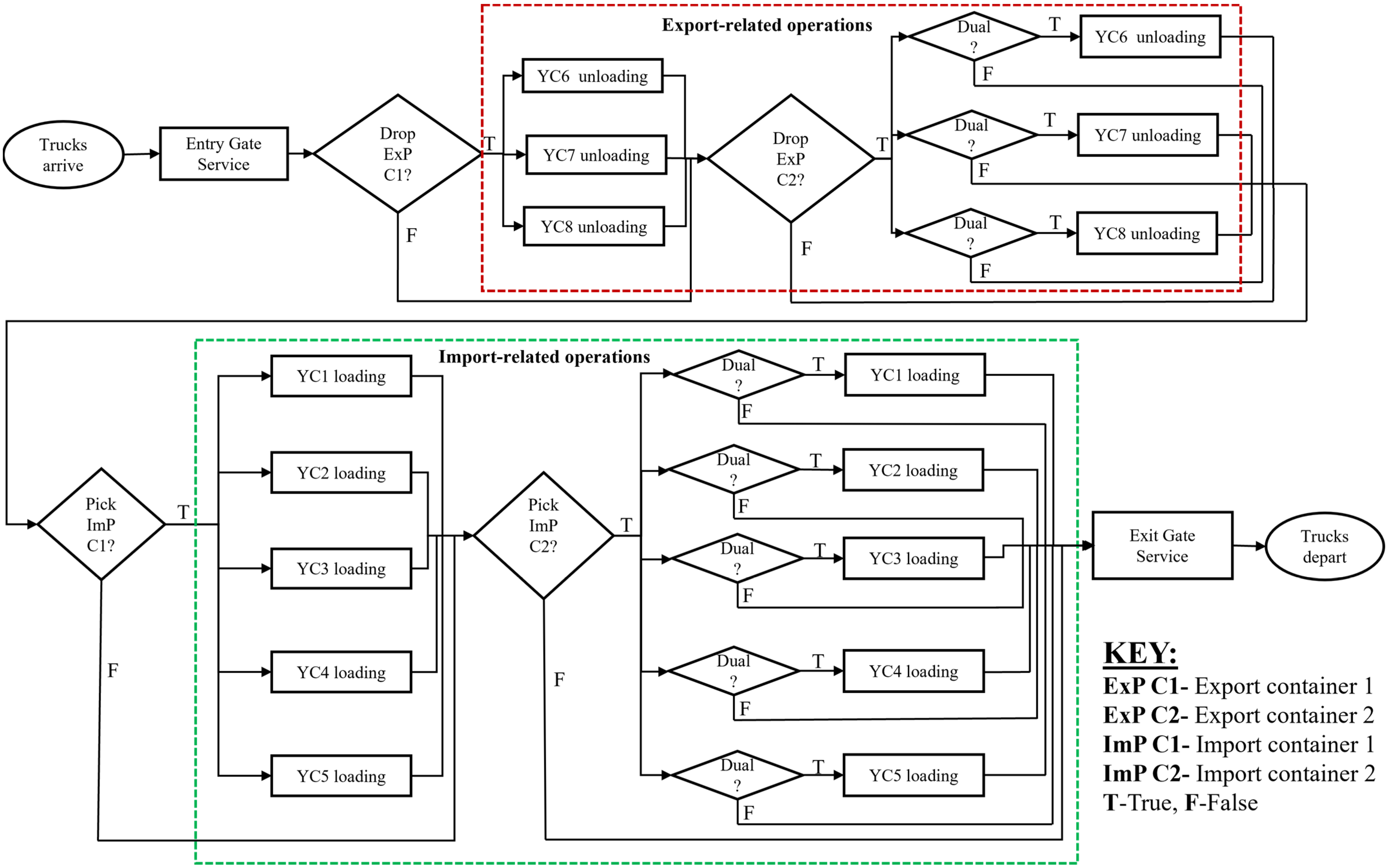
4.2.2. Logic Modeling
4.2.3. Model Verification and Validation
5. Experiment Setup
5.1. Minimizing the Entry Gate Operation Costs via Simulation-Optimization
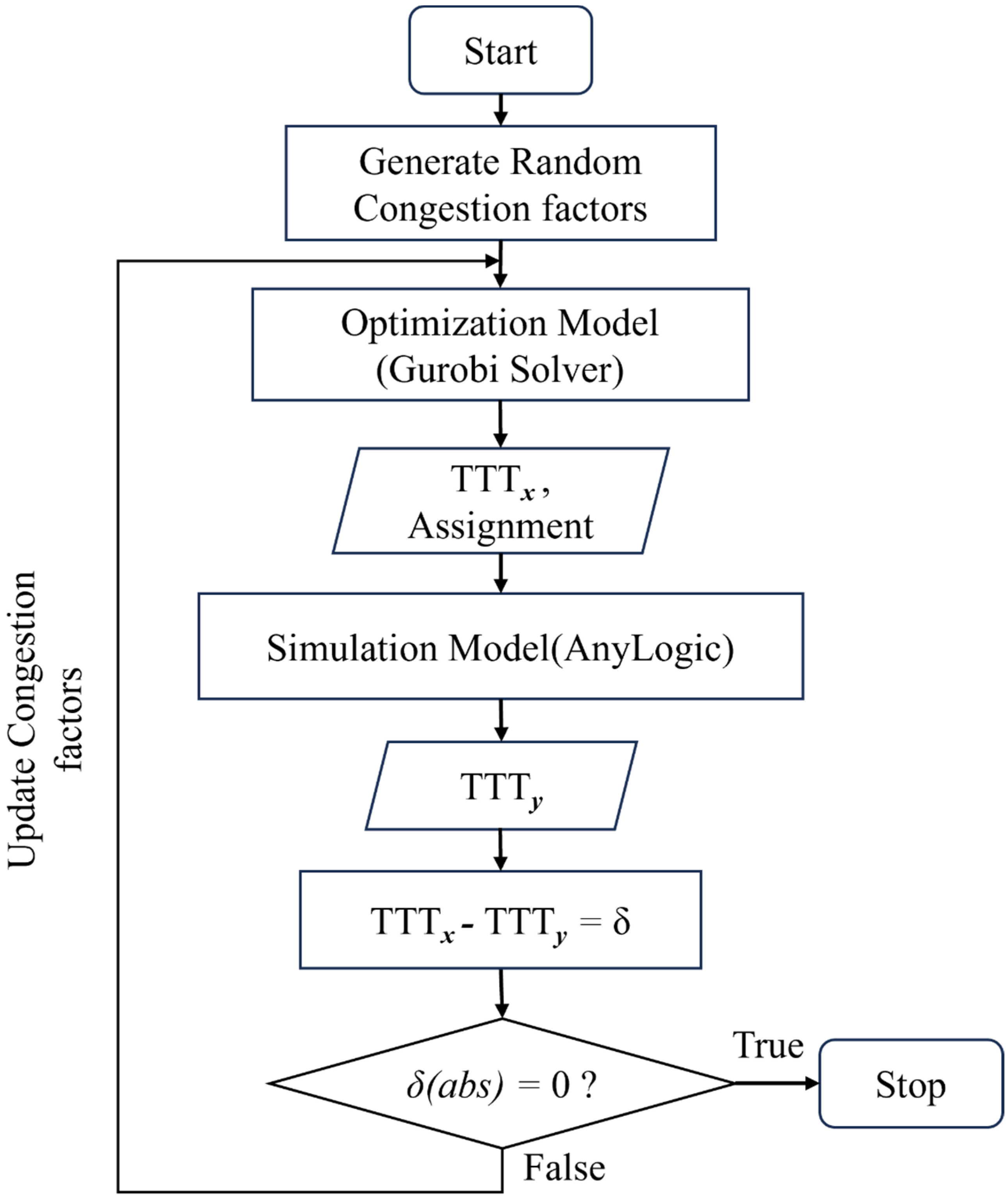
5.2. Improving Congestion Factors Representation through an Iterative Simulation-Based Optimization Procedure
6. Results and Discussions
6.1. Simulation Optimization Results
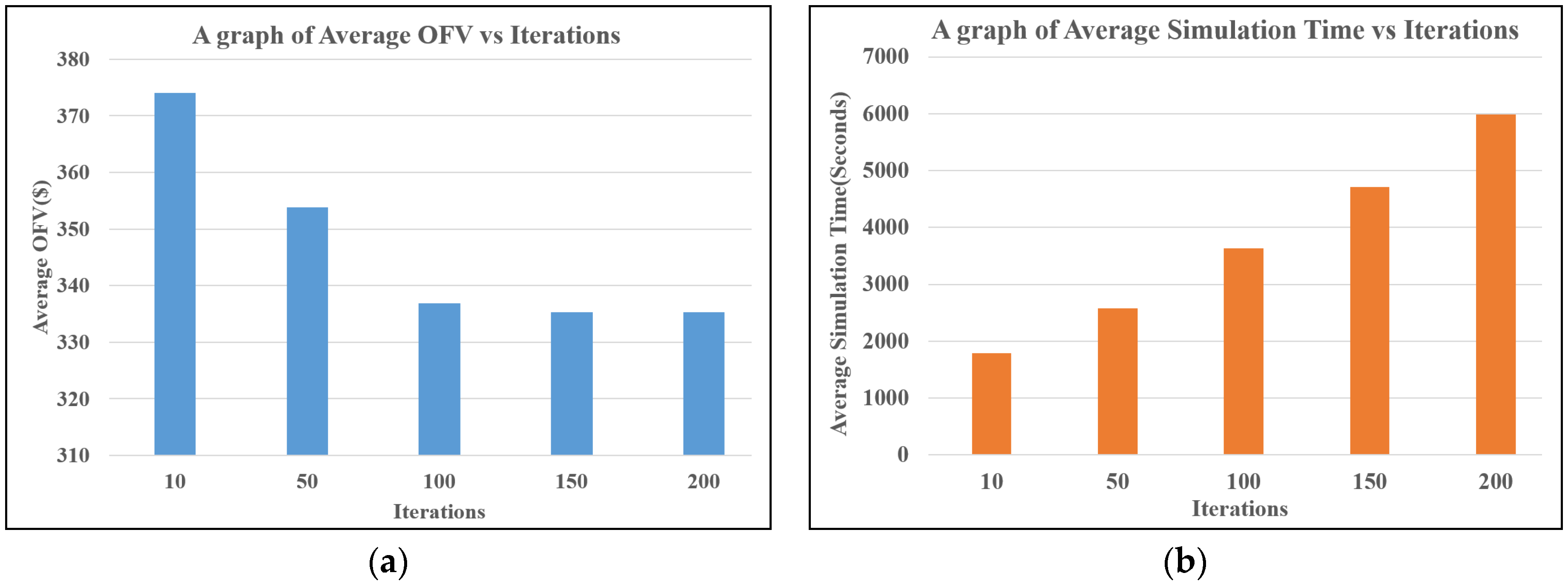
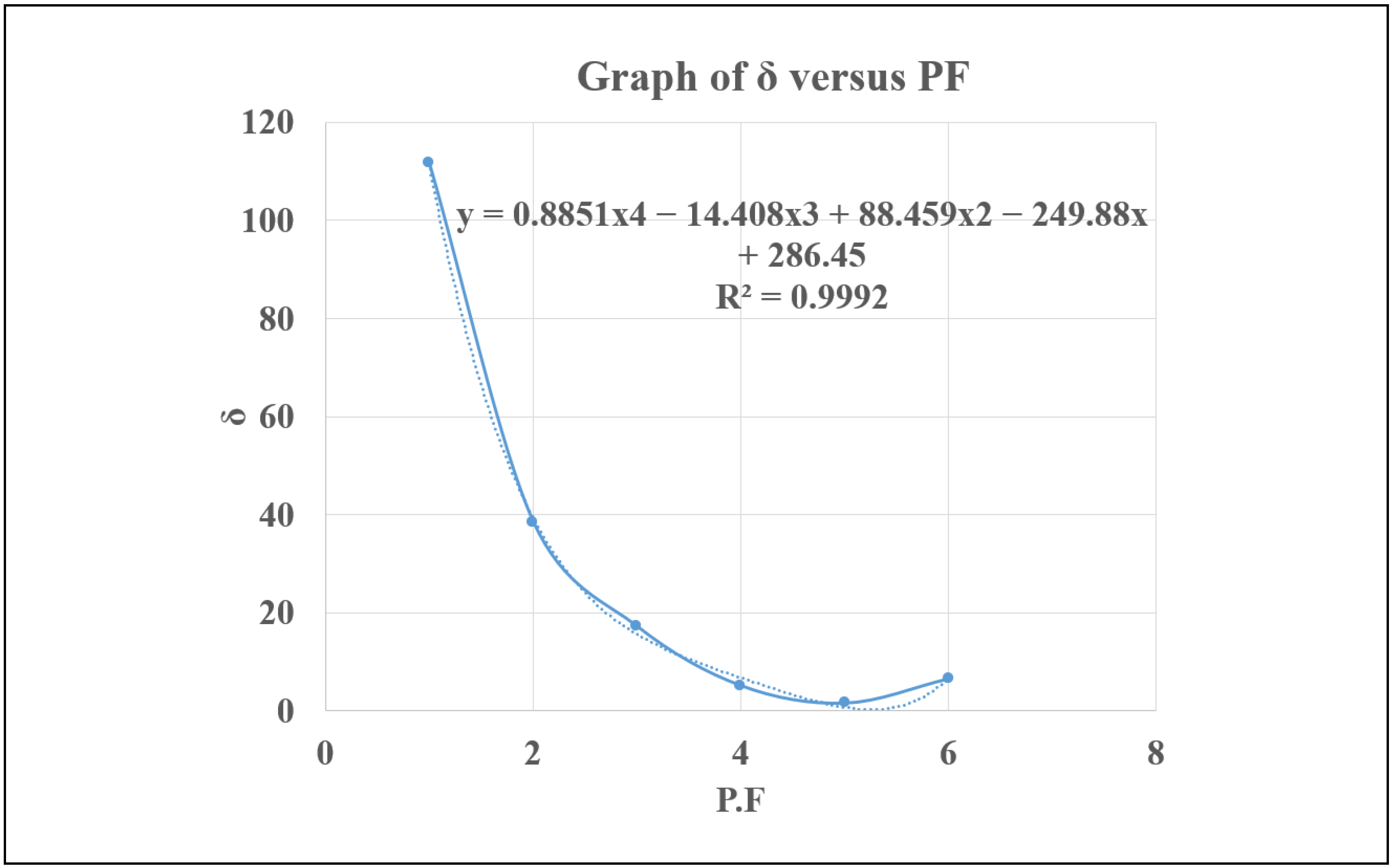
6.2. Simulation-Based Optimization Iteration Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Replications | BestOFV (USD) | SimulationTime (s) | Gate Counter Combination |
|---|---|---|---|---|
| 1 | (19, 30) | 373.54 | 1739.80 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 2 | (19, 30) | 373.72 | 1856.70 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 3 | (19, 30) | 374.13 | 1815.00 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 4 | (19, 30) | 373.69 | 1777.27 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 5 | (19, 30) | 373.70 | 1821.33 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 6 | (19, 30) | 375.43 | 1805.21 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 7 | (19, 30) | 374.00 | 1824.59 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 8 | (19, 30) | 373.31 | 1821.63 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 9 | (19, 30) | 373.36 | 1811.09 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 10 | (19, 30) | 373.72 | 1805.54 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 11 | (19, 30) | 374.65 | 1774.28 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 12 | (19, 30) | 373.34 | 1803.41 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 13 | (19, 30) | 374.08 | 1798.17 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 14 | (19, 30) | 372.98 | 1780.49 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 15 | (19, 30) | 374.23 | 1803.28 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 16 | (19, 30) | 373.74 | 1778.78 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 17 | (19, 30) | 374.45 | 1827.72 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 18 | (19, 30) | 373.93 | 1812.62 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 19 | (19, 30) | 374.62 | 1844.13 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 20 | (19, 30) | 373.60 | 1790.92 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 21 | (19, 30) | 375.46 | 1814.20 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 22 | (19, 30) | 373.09 | 1761.66 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 23 | (19, 30) | 372.64 | 1783.81 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 24 | (19, 30) | 373.81 | 1748.23 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 25 | (19, 30) | 373.40 | 1741.08 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 26 | (19, 30) | 373.18 | 1749.38 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 27 | (19, 30) | 376.11 | 1770.83 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 28 | (19, 30) | 374.98 | 1761.61 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 29 | (19, 30) | 375.24 | 1739.81 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| 30 | (19, 30) | 375.04 | 1741.94 | 1, 2, 1, 4, 2, 5, 3, 3, 2, 2, 3, 3 |
| Average | 374.04 | 1790.15 |
| Experiment | Replications | Best OFV (USD) | Simulation Time (s) | Gate Counter Combination |
|---|---|---|---|---|
| 1 | (95, 30) | 362.49 | 2646.70 | 1, 2, 1, 3, 2, 3, 3, 3, 2, 2, 3, 3 |
| 2 | (95, 30) | 334.39 | 2614.13 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 3 | (89, 30) | 335.78 | 2597.12 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 4 | (98, 30) | 363.25 | 2514.51 | 2, 2, 1, 4, 3, 5, 2, 3, 2, 2, 3, 2 |
| 5 | (71, 30) | 357.33 | 2555.19 | 4, 2, 2, 2, 2, 2, 2, 3, 2, 3, 2, 4 |
| 6 | (95, 30) | 335.97 | 2459.54 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 7 | (92, 30) | 336.28 | 2441.23 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 8 | (99, 30) | 364.43 | 2581.84 | 2, 3, 2, 3, 3, 3, 3, 3, 2, 3, 3, 3 |
| 9 | (95, 30) | 334.99 | 2576.05 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 10 | (89, 30) | 353.85 | 2480.84 | 2, 2, 2, 3, 3, 3, 3, 3, 2, 2, 2, 3 |
| 11 | (90, 30) | 367.23 | 2558.64 | 2, 2, 4, 5, 2, 2, 3, 2, 2, 3, 2, 3 |
| 12 | (97, 30) | 360.53 | 2437.02 | 2, 2, 1, 3, 2, 5, 3, 3, 2, 2, 3, 2 |
| 13 | (72, 30) | 365.48 | 2558.09 | 3, 2, 3, 3, 3, 2, 3, 3, 2, 3, 2, 4 |
| 14 | (91, 30) | 363.80 | 2583.20 | 3, 2, 1, 3, 2, 3, 3, 3, 2, 3, 3, 3 |
| 15 | (87, 30) | 362.75 | 2435.68 | 2, 2, 1, 4, 2, 4, 3, 3, 2, 2, 3, 3 |
| 16 | (77, 30) | 367.05 | 2318.36 | 3, 2, 2, 3, 2, 3, 3, 3, 2, 3, 3, 4 |
| 17 | (95, 30) | 334.99 | 2408.15 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 18 | (97, 30) | 364.09 | 2326.07 | 2, 2, 1, 4, 3, 5, 2, 3, 2, 2, 3, 2 |
| 19 | (71, 30) | 356.58 | 2327.95 | 4, 2, 2, 2, 2, 2, 2, 3, 2, 3, 2, 4 |
| 20 | (93, 30) | 364.35 | 2371.75 | 2, 3, 1, 3, 2, 5, 2, 3, 2, 2, 3, 3 |
| 21 | (95, 30) | 336.72 | 2604.53 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 22 | (91, 30) | 360.94 | 2330.55 | 3, 2, 1, 3, 2, 3, 3, 3, 2, 2, 3, 3 |
| 23 | (77, 30) | 365.05 | 2313.03 | 3, 2, 3, 3, 3, 2, 3, 3, 2, 3, 2, 4 |
| 24 | (99, 30) | 363.69 | 2399.64 | 2, 2, 2, 3, 2, 5, 3, 3, 2, 2, 3, 3 |
| 25 | (94, 30) | 336.60 | 3079.78 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 26 | (77, 30) | 367.67 | 2639.87 | 3, 2, 2, 3, 2, 3, 3, 3, 2, 3, 3, 4 |
| 27 | (90, 30) | 364.60 | 3491.71 | 2, 3, 2, 3, 3, 3, 3, 3, 2, 3, 3, 3 |
| 28 | (94, 30) | 336.13 | 2765.46 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 29 | (99, 30) | 361.83 | 3332.31 | 1, 2, 1, 3, 2, 3, 3, 3, 2, 2, 3, 3 |
| 30 | (94, 30) | 335.19 | 2513.79 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| Average | 353.80 | 2575.42 |
| Experiment | Replications | Best OFV (USD) | Simulation Time (s) | Gate Counter Combination |
|---|---|---|---|---|
| 1 | (95, 30) | 335.90 | 3726.29 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 2 | (87, 30) | 336.33 | 3711.25 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 3 | (140, 30) | 334.88 | 3700.98 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 4 | (148, 30) | 338.98 | 3704.93 | 2, 2, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 5 | (134, 30) | 335.56 | 3592.76 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 6 | (94, 30) | 334.79 | 3602.35 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 7 | (103, 30) | 337.03 | 3588.44 | 2, 2, 2, 2, 3, 2, 2, 2, 2, 2, 2, 2 |
| 8 | (121, 30) | 334.16 | 3570.62 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 9 | (94, 30) | 336.17 | 3733.59 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 10 | (124, 30) | 339.20 | 3571.49 | 2, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 11 | (94, 30) | 335.30 | 3521.49 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 12 | (95, 30) | 335.34 | 3482.06 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 13 | (94, 30) | 335.31 | 3500.91 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 14 | (123, 30) | 336.68 | 3722.59 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 15 | (122, 30) | 339.79 | 3602.76 | 2, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 16 | (146, 30) | 338.92 | 3460.91 | 3, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 17 | (135, 30) | 336.76 | 3609.78 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 18 | (102, 30) | 336.78 | 3687.66 | 2, 2, 2, 2, 3, 2, 2, 2, 2, 2, 2, 2 |
| 19 | (121, 30) | 342.43 | 3614.87 | 2, 2, 2, 2, 4, 2, 2, 2, 2, 2, 2, 2 |
| 20 | (87, 30) | 335.67 | 3755.69 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 21 | (150, 30) | 339.72 | 3738.85 | 2, 2, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 22 | (94, 30) | 335.33 | 3815.82 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 23 | (130, 30) | 334.68 | 3665.46 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 24 | (95, 30) | 334.93 | 3620.66 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 25 | (121, 30) | 341.21 | 3624.38 | 2, 2, 2, 2, 4, 2, 2, 2, 2, 2, 2, 2 |
| 26 | (95, 30) | 335.90 | 3533.24 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 27 | (134, 30) | 339.88 | 3550.20 | 2, 2, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 28 | (95, 30) | 335.57 | 3663.92 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 29 | (131, 30) | 336.13 | 3737.63 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 30 | (151, 30) | 336.88 | 3611.79 | 2, 2, 2, 3, 2, 3, 3, 3, 2, 3, 3, 4 |
| Average | 336.87 | 3634.11 |
| Experiment | Replications | Best OFV (USD) | Simulation Time (s) | Gate Counter Combination |
|---|---|---|---|---|
| 1 | (147, 30) | 334.88 | 4706.09 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 2 | (89, 30) | 336.15 | 5021.28 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 3 | (167, 30) | 334.41 | 4719.36 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 4 | (146, 30) | 336.81 | 4627.15 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 5 | (150, 30) | 334.30 | 4837.36 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 6 | (94, 30) | 335.82 | 4786.05 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 7 | (95, 30) | 335.61 | 4817.81 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 8 | (175, 30) | 335.91 | 4654.58 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 9 | (180, 30) | 335.59 | 4882.80 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 10 | (136, 30) | 335.87 | 4634.39 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 11 | (95, 30) | 335.46 | 4876.48 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 12 | (159, 30) | 334.14 | 4619.38 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 13 | (87, 30) | 336.00 | 4826.03 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 14 | (135, 30) | 335.22 | 4495.80 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 15 | (119, 30) | 334.20 | 4827.79 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 16 | (173, 30) | 332.45 | 4581.92 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 17 | (122, 30) | 333.62 | 4869.33 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 18 | (175, 30) | 335.35 | 4515.13 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 19 | (134, 30) | 334.72 | 4810.52 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 20 | (176, 30) | 335.89 | 4863.81 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 21 | (87, 30) | 334.77 | 4526.43 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 22 | (197, 30) | 335.15 | 4839.62 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 23 | (95, 30) | 335.21 | 4525.94 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 24 | (176, 30) | 334.32 | 4514.03 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 25 | (131, 30) | 336.30 | 4772.11 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 26 | (127, 30) | 336.08 | 4483.52 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 27 | (166, 30) | 340.27 | 4787.60 | 2, 2, 3, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 28 | (129, 30) | 336.21 | 4494.32 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 29 | (152, 30) | 334.19 | 4837.28 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 30 | (128, 30) | 335.40 | 4514.55 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| Average | 335.34 | 4708.95 |
Appendix B
| Iteration | Optimization | Simulation | (TTTx − TTTy) | OFV (∑TTT) | |
|---|---|---|---|---|---|
| TTTx | TTTy | δ | δ (%) | ||
| 1 | 140.89 | 37.68 | 103.20 | 73.25 | 40,430.40 |
| 2 | 136.80 | 37.86 | 98.94 | 72.33 | 39,259.30 |
| 3 | 160.88 | 37.95 | 122.92 | 76.41 | 46,167.10 |
| 4 | 153.20 | 37.88 | 115.32 | 75.27 | 43,966.00 |
| 5 | 156.22 | 38.22 | 118.00 | 75.53 | 44,833.20 |
| Average | 111.68 | 74.56 | |||
| Iteration | Optimization | Simulation | (TTTx − TTTy) | OFV (∑TTT) | |
|---|---|---|---|---|---|
| TTTx | TTTy | δ | δ(%) | ||
| 1 | 74.93 | 37.69 | 37.24 | 49.70 | 21,502.20 |
| 2 | 73.68 | 37.88 | 35.80 | 48.58 | 21,143.80 |
| 3 | 83.44 | 37.64 | 45.80 | 54.89 | 23,944.30 |
| 4 | 74.25 | 37.82 | 36.43 | 49.06 | 21,309.40 |
| 5 | 75.67 | 37.84 | 37.83 | 50.00 | 21,715.00 |
| Average | 38.62 | 50.45 | |||
| Iteration | Optimization | Simulation | (TTTx − TTTy) | OFV (∑TTT) | |
|---|---|---|---|---|---|
| TTTx | TTTy | δ | δ (%) | ||
| 1 | 52.94 | 37.99 | 14.95 | 28.23 | 15,192.80 |
| 2 | 53.14 | 38.18 | 14.97 | 28.16 | 15,250.60 |
| 3 | 56.89 | 38.09 | 18.79 | 33.04 | 16,324.80 |
| 4 | 55.34 | 37.58 | 17.76 | 32.09 | 15,881.70 |
| 5 | 57.50 | 37.66 | 19.84 | 34.51 | 16,499.50 |
| Average | 17.26 | 31.21 | |||
| Iteration | Optimization | Simulation | (TTTx − TTTy) | OFV (∑TTT) | |
|---|---|---|---|---|---|
| TTTx | TTTy | δ | δ (%) | ||
| 1 | 41.95 | 37.98 | 3.97 | 9.46 | 12,038.10 |
| 2 | 42.08 | 38.17 | 3.91 | 9.30 | 12,076.90 |
| 3 | 45.34 | 38.00 | 7.34 | 16.20 | 13,011.20 |
| 4 | 43.75 | 38.10 | 5.65 | 12.92 | 12,555.50 |
| 5 | 42.80 | 38.02 | 4.78 | 11.16 | 12,281.40 |
| Average | 5.13 | 11.81 | |||
| Iteration | Optimization | Simulation | (TTTx − TTTy) | OFV (∑TTT) | |
|---|---|---|---|---|---|
| TTTx | TTTy | δ | δ (%) | ||
| 1 | 30.96 | 38.05 | −7.09 | −22.92 | 8883.39 |
| 2 | 31.10 | 37.90 | −6.81 | −21.89 | 8923.53 |
| 3 | 32.30 | 37.96 | −5.67 | −17.54 | 9267.89 |
| 4 | 30.15 | 38.13 | −7.97 | −26.44 | 8653.41 |
| 5 | 32.85 | 37.85 | −5.01 | −15.24 | 9425.66 |
| Average | −6.51 | −20.81 | |||
References
- United Nations Conference on Trade and Development (UNCTAD). Review of Maritime Transport. 2022. Available online: https://unctadstat.unctad.org/datacentre/dataviewer/US.TradeMerchGR (accessed on 20 October 2023).
- United Nations Conference on Trade and Development (UNCTAD). Review Of Maritime Transport. 2023. Available online: https://unctad.org/publication/review-maritime-transport-2023 (accessed on 19 April 2024).
- Abdelmagid, A.M.; Gheith, M.S.; Eltawil, A.B. A comprehensive review of the truck appointment scheduling models and directions for future research. Transp. Rev. 2022, 42, 102–126. [Google Scholar] [CrossRef]
- Im, H.; Yu, J.; Lee, C. Truck appointment system for cooperation between the transport companies and the terminal operator at container terminals. Appl. Sci. 2021, 11, 168. [Google Scholar] [CrossRef]
- Zhang, X.; Zeng, Q.; Yang, Z. Optimization of truck appointments in container terminals. Marit. Econ. Logist. 2019, 21, 125–145. [Google Scholar] [CrossRef]
- Morais, P.; Lord, E. Terminal Appointment System Study. Transp. Res. Board 2006, 1, 123. [Google Scholar]
- Chen, G.; Govindan, K.; Yang, Z. Managing truck arrivals with time windows to alleviate gate congestion at container terminals. Int. J. Prod. Econ. 2013, 141, 179–188. [Google Scholar] [CrossRef]
- Chen, G.; Govindan, K.; Golias, M.M. Reducing truck emissions at container terminals in a low carbon economy: Proposal of a queueing-based bi-objective model for optimizing truck arrival pattern. Transp. Res. Part E Logist. Transp. Rev. 2013, 55, 3–22. [Google Scholar] [CrossRef]
- Riaventin, V.N.; Cahyono, R.T. Towards Integration of Truck Appointment System and Direction for Future Research. In Proceedings of the 3rd Asia Pacific International Conference on Industrial Engineering and Operations Management, Johor Bahru, Malaysia, 13–15 September 2022; pp. 3022–3030. [Google Scholar] [CrossRef]
- Oladugba, A.O.; Gheith, M.; Eltawil, A. A new solution approach for the twin yard crane scheduling problem in automated container terminals. Adv. Eng. Inform. 2023, 57, 102015. [Google Scholar] [CrossRef]
- Doaa, N.; Mohamed, G.; Eltawil, A. A comprehensive review and directions for future research on the integrated scheduling of quay cranes and automated guided vehicles and yard cranes in automated container terminals. Comput. Ind. Eng. 2023, 179, 109149. [Google Scholar] [CrossRef]
- Bett, D.K.; Ali, I.; Gheith, M.; Eltawil, A. Discrete Event Simulation Of Truck Appointment Systems In Container Terminals: A Dual Transactions Approach. In Proceedings of the International Maritime Transport and Logistics Conference (MARLOG13), Alexandria, Egypt, 2–5 March 2024; pp. 1–16. Available online: https://marlog.aast.edu/files/marlog13/MARLOG13_paper_90.pdf (accessed on 5 May 2024).
- Yu, H.; Deng, Y.; Zhang, L.; Xiao, X.; Tan, C. Yard Operations and Management in Automated Container Terminals: A Review. Sustainability 2022, 14, 3419. [Google Scholar] [CrossRef]
- Pham, H.T.; Nguyen, L.H. Empirical Performance Measurement of Cargo Handling Equipment in Vietnam Container Terminals. Logistics 2022, 6, 44. [Google Scholar] [CrossRef]
- Li, N.; Haralambides, H.; Sheng, H.; Jin, Z. A new vocation queuing model to optimize truck appointments and yard handling-equipment use in dual transactions systems of container terminals. Comput. Ind. Eng. 2022, 169, 108216. [Google Scholar] [CrossRef]
- Azab, A.; Karam, A.; Eltawil, A. A simulation-based optimization approach for external trucks appointment scheduling in container terminals. Int. J. Model. Simul. 2020, 40, 321–338. [Google Scholar] [CrossRef]
- Giuliano, G.; O’Brien, T. Reducing port-related truck emissions: The terminal gate appointment system at the Ports of Los Angeles and Long Beach. Transp. Res. Part D Transp. Environ. 2007, 12, 460–473. [Google Scholar] [CrossRef]
- Torkjazi, M.; Huynh, N.; Shiri, S. Truck appointment systems considering impact to drayage truck tours. Transp. Res. Part E Logist. Transp. Rev. 2018, 116, 208–228. [Google Scholar] [CrossRef]
- Do, N.A.D.; Nielsen, I.E.; Chen, G.; Nielsen, P. A simulation-based genetic algorithm approach for reducing emissions from import container pick-up operation at container terminal. Ann. Oper. Res. 2016, 242, 285–301. [Google Scholar] [CrossRef]
- Naeem, D.; Eltawil, A.; Iijima, J.; Gheith, M. Integrated Scheduling of Automated Yard Cranes and Automated Guided Vehicles with Limited Buffer Capacity of Dual-Trolley Quay Cranes in Automated Container Terminals. Logistics 2022, 6, 82. [Google Scholar] [CrossRef]
- Elwakil, M.; Gheith, M.; Eltawil, A. A New Hybrid Salp Swarm-simulated Annealing Algorithm for the Container Stacking Problem. In Proceedings of the 9th International Conference on Operations Research and Enterprise Systems ICORES, Valetta, Malta, 22–24 February 2020; pp. 89–99. [Google Scholar] [CrossRef]
- Rashed, D.; Eltawil, A.; Gheith, M. A Fuzzy Logic-Based Algorithm to Solve the Slot Planning Problem in Container Vessels. Logistics 2021, 5, 67. [Google Scholar] [CrossRef]
- Phan, M.H.; Kim, K.H. Collaborative truck scheduling and appointments for trucking companies and container terminals. Transp. Res. Part B Methodol. 2016, 86, 37–50. [Google Scholar] [CrossRef]
- Zehendner, E.; Feillet, D. Benefits of a truck appointment system on the service quality of inland transport modes at a multimodal container terminal. Eur. J. Oper. Res. 2014, 235, 461–469. [Google Scholar] [CrossRef]
- Phan, M.H.; Kim, K.H. Negotiating truck arrival times among trucking companies and a container terminal. Transp. Res. Part E Logist. Transp. Rev. 2015, 75, 132–144. [Google Scholar] [CrossRef]
- Huynn, N.; Walton, C.M.; Davis, J. Finding the number of yard cranes needed to achieve desired truck turn time at marine container terminals. Transp. Res. Rec. 2004, 1873, 99–108. [Google Scholar] [CrossRef]
- Huynh, N. Reducing truck turn times at marine terminals with appointment scheduling. Transp. Res. Rec. 2009, 2100, 47–57. [Google Scholar] [CrossRef]
- Zhang, X.; Zeng, Q.; Chen, W. Optimization Model for Truck Appointment in Container Terminals. Procedia Soc. Behav. Sci. 2013, 96, 1938–1947. [Google Scholar] [CrossRef]
- Chen, G.; Yang, Z. Optimizing time windows for managing export container arrivals at Chinese container terminals. Marit. Econ. Logist. 2010, 12, 111–126. [Google Scholar] [CrossRef]
- Abdelmagid, A.M.; Gheith, M.; Eltawil, A. Scheduling External Trucks Appointments in Container Terminals to Minimize Cost and Truck Turnaround Times. Logistics 2022, 6, 45. [Google Scholar] [CrossRef]
- Jin, Z.; Lin, X.; Zang, L.; Liu, W.; Xiao, X. Lane allocation optimization in container seaport gate system considering carbon emissions. Sustainability 2021, 13, 3628. [Google Scholar] [CrossRef]
- Schulte, F.; González, R.G.; Voß, S. Reducing port-related truck emissions: Coordinated truck appointments to reduce empty truck trips. In Computational Logistics; Lecture Notes in Computer Science; Springer: Cham, Swizerland, 2015; Volume 9335, pp. 495–509. [Google Scholar] [CrossRef]
- Schulte, F.; Lalla-Ruiz, E.; González-Ramírez, R.G.; Voß, S. Reducing port-related empty truck emissions: A mathematical approach for truck appointments with collaboration. Transp. Res. Part E Logist. Transp. Rev. 2017, 105, 195–212. [Google Scholar] [CrossRef]
- Caballini, C.; Gracia, M.D.; Mar-Ortiz, J.; Sacone, S. A combined data mining—Optimization approach to manage trucks operations in container terminals with the use of a TAS: Application to an Italian and a Mexican port. Transp. Res. Part E Logist. Transp. Rev. 2020, 142, 102054. [Google Scholar] [CrossRef]
- Sun, S.; Zheng, Y.; Dong, Y.; Li, N.; Jin, Z.; Yu, Q. Reducing External Container Trucks’ Turnaround Time in Ports: A Data-driven Approach under Truck Appointment Systems. Comput. Ind. Eng. 2022, 174, 108787. [Google Scholar] [CrossRef]
- da Silva, M.R.F.; Agostino, I.R.S.; Frazzon, E.M. Integration of machine learning and simulation for dynamic rescheduling in truck appointment systems. Simul. Model. Pract. Theory 2023, 125, 102747. [Google Scholar] [CrossRef]
- Zhou, C.; Zhao, Q.; Li, H. Simulation optimization iteration approach on traffic integrated yard allocation problem in transshipment terminals. Flex. Serv. Manuf. J. 2021, 33, 663–688. [Google Scholar] [CrossRef]
- Islam, S. Simulation of truck arrival process at a seaport: Evaluating truck-sharing benefits for empty trips reduction. Int. J. Logist. Res. Appl. 2018, 21, 94–112. [Google Scholar] [CrossRef]
- Keceli, Y. A simulation model for gate operations in multi-purpose cargo terminals. Marit. Policy Manag. 2016, 43, 945–958. [Google Scholar] [CrossRef]
- Chamchang, P.; Niyomdecha, H. Impact of service policies on terminal gate efficiency: A simulation approach. Cogent Bus. Manag. 2021, 8, 1975955. [Google Scholar] [CrossRef]
- Talaat, A.; Iijima, J.; Gheith, M.; Eltawil, A. An Integrated k-Means Clustering and Bi-Objective Optimization Approach for External Trucks Scheduling in Container Terminals. In Advances in Transdisciplinary Engineering; IOS Press BV: Amsterdam, The Netherlands, 2023. [Google Scholar] [CrossRef]
- Azab, A.; Karam, A.; Eltawil, A. A dynamic and collaborative truck appointment management system in container terminals. In Proceedings of the 6th International Conference on Operations Research and Enterprise Systems ICORES, Porto, Portugal, 23–25 February 2017; pp. 85–95. [Google Scholar] [CrossRef]
- Talaat, A.; Gheith, M.; Eltawil, A. A Multi-Stage Approach for External Trucks and Yard Cranes Scheduling with CO2 Emissions Considerations in Container Terminals. Logistics 2023, 7, 87. [Google Scholar] [CrossRef]
- Amaran, S.; Sahinidis, N.V.; Sharda, B.; Bury, S.J. Simulation optimization: A review of algorithms and applications. Ann. Oper. Res. 2016, 240, 351–380. [Google Scholar] [CrossRef]
- Guan, C.Q.; Liu, R. Modeling gate congestion of marine container terminals, truck waiting cost, and optimization. Transp. Res. Rec. 2009, 2100, 58–67. [Google Scholar] [CrossRef]
- Minh, C.C.; Huynh, N. Optimal design of container terminal gate layout. Int. J. Shipp. Transp. Logist. 2017, 9, 640–650. [Google Scholar] [CrossRef]

| Gate Parameters | |
| CT gate opening hours | Shift 1: 12:00:00 a.m.–08:00:00 a.m. Shift 2: 08:00:00 a.m.–04:00:00 p.m. Shift 3: 04:00:00 p.m.–12:00:00 a.m. |
| Truck speed (max) | 18 km/h [42] |
| Entry processing time | TRIA (0.5, 1, 4) minutes [27] |
| Exit processing time with no survey of container | TRIA (0.02, 0.099, 0.3) minutes [26] |
| Number of gate counters at Entry | 3 |
| Number of gate counters at Exit | 3 |
| Yard parameters | |
| Number of import blocks (IB) | 5 [43] |
| Number of export blocks (EB) | 3 [43] |
| Number of Yard Cranes (YC) | 8 [43] |
| Unloading/Loading time | 0.26 + LOGN (0.941, 0.519) minutes [27] |
| Road parameters | |
| Lane width | 3.5 m |
| Number of Gate Entry/Exit lanes | 3 |
| Truck Trip No. | Export | Import | A1 | A2 | A3 | A4 | Preferred TW | Priority Index |
|---|---|---|---|---|---|---|---|---|
| 1 | (38, 183) | (385, 652) | 8 | 6 | 1 | 5 | 1 | 2 |
| 2 | (190, 299) | (318, 355) | 7 | 7 | 3 | 2 | 1 | 2 |
| 3 | (435, 523) | (56, 322) | 6 | 8 | 2 | 2 | 1 | 2 |
| 4 | (613, 693) | (16, 238) | 8 | 7 | 2 | 2 | 1 | 2 |
| 1057 | (None, None) | (720, None) | 0 | 0 | 4 | 0 | 12 | 1 |
| Replications | Number of Iterations | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| OFV (USD) | |||||||||||
| 5 | 371.8 | 339.4 | 339.3 | 336.9 | 335.5 | 334.7 | 343.1 | 336.4 | 336.6 | 336.4 | 335.9 |
| 10 | 375.7 | 337.0 | 336.0 | 334.9 | 335.6 | 336.7 | 335.3 | 335.8 | 335.3 | 335.9 | 335.2 |
| 15 | 372.5 | 367.3 | 340.8 | 336.8 | 334.8 | 335.7 | 336.3 | 335.6 | 336.2 | 335.0 | 334.6 |
| 20 | 372.7 | 358.1 | 334.4 | 335.1 | 336.3 | 336.3 | 334.5 | 336.6 | 335.1 | 334.7 | 334.0 |
| 25 | 371.3 | 335.7 | 334.1 | 335.1 | 333.9 | 336.3 | 332.3 | 335.1 | 336.2 | 335.4 | 336.5 |
| 30 | 368.3 | 365.0 | 336.2 | 335.6 | 336.5 | 335.4 | 335.3 | 334.7 | 335.5 | 334.6 | 334.3 |
| Average | 372.1 | 350.4 | 336.8 | 335.7 | 335.4 | 335.8 | 336.1 | 335.7 | 335.8 | 335.3 | 335.1 |
| %Difference | −11.0 | −4.6 | −0.5 | −0.2 | −0.1 | −0.2 | −0.3 | −0.2 | −0.2 | −0.1 | 0.0 |
| Replications | Number of Iterations | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| Simulation Time (s) | |||||||||||
| 5 | 342.7 | 454.5 | 562.5 | 894.4 | 1037.1 | 1099.7 | 1077.8 | 1184.3 | 1130.6 | 1052.1 | 1184.4 |
| 10 | 658.0 | 820.0 | 1234.6 | 1639.4 | 2041.5 | 2446.7 | 2675.1 | 2562.1 | 2475.8 | 2689.5 | 2692.3 |
| 15 | 906.7 | 1319.5 | 1869.6 | 2481.5 | 3021.8 | 3571.2 | 4065.4 | 3795.1 | 3728.4 | 4035.8 | 4036.0 |
| 20 | 1240.0 | 1759.3 | 2497.0 | 3313.1 | 4006.0 | 4720.5 | 5394.3 | 4986.9 | 5439.4 | 5393.0 | 4935.4 |
| 25 | 1470.5 | 2093.3 | 3171.8 | 4016.6 | 5182.7 | 5999.2 | 7027.9 | 6733.0 | 6808.7 | 6098.6 | 6072.5 |
| 30 | 1681.5 | 2470.8 | 3663.0 | 4848.6 | 6292.0 | 7313.2 | 7363.8 | 7606.2 | 8120.6 | 8154.7 | 8391.6 |
| Average | 1049.9 | 1486.2 | 2166.4 | 2865.6 | 3596.9 | 4191.7 | 4600.7 | 4477.9 | 4617.2 | 4570.6 | 4552.0 |
| %Difference | 77.3 | 67.8 | 53.1 | 37.9 | 22.1 | 9.2 | 0.4 | 3.0 | 0.0 | 1.0 | 1.4 |
| Experiment | Replications | Best OFV (USD) | Simulation Time (s) | Gate Counters Combination |
|---|---|---|---|---|
| 1 | (189, 30) | 333.92 | 6161.22 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 2 | (154, 30) | 335.73 | 6096.46 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 3 | (95, 30) | 334.43 | 5976.64 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 4 | (100, 30) | 335.65 | 5797.40 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 5 | (87, 30) | 336.43 | 6046.77 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 6 | (129, 30) | 335.92 | 5912.67 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 7 | (134, 30) | 335.24 | 5918.27 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 8 | (95, 30) | 336.48 | 5896.95 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 9 | (211, 30) | 334.41 | 5889.97 | 2, 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 10 | (87, 30) | 335.88 | 5972.64 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 11 | (93, 30) | 336.64 | 5944.40 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 12 | (120, 30) | 335.06 | 5819.81 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 13 | (144, 30) | 333.71 | 5824.33 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 14 | (95, 30) | 336.10 | 6209.66 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 15 | (214, 30) | 334.31 | 5829.35 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 16 | (225, 30) | 335.90 | 6082.48 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 17 | (181, 30) | 334.78 | 6196.06 | 2, 1, 2, 1, 2, 2, 2, 2, 2, 2, 2, 2 |
| 18 | (101, 30) | 336.70 | 5803.55 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 19 | (250, 30) | 335.61 | 5842.25 | 2, 2, 2, 1, 2, 2, 2, 2, 2, 2, 2, 2 |
| 20 | (158, 30) | 335.34 | 6109.09 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 21 | (125, 30) | 334.93 | 5892.40 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 22 | (170, 30) | 334.64 | 6067.39 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 23 | (131, 30) | 335.95 | 5999.09 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 24 | (179, 30) | 334.56 | 6257.06 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 25 | (136, 30) | 336.43 | 6038.44 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 26 | (139, 30) | 333.86 | 6139.11 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 27 | (123, 30) | 336.31 | 6041.06 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 28 | (132, 30) | 334.32 | 6044.44 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 29 | (205, 30) | 334.52 | 5954.31 | 2, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| 30 | (168, 30) | 335.55 | 6046.86 | 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2 |
| Average | 335.31 | 5993.67 |
| Iteration | Optimization | Simulation | (TTTx − TTTy) | OFV (∑TTT) Gurobi Solver | |
|---|---|---|---|---|---|
| TTTx | TTTy | δ | δ (%) | ||
| 1 | 35.35 | 37.95 | −2.60 | −7.35 | 10145.30 |
| 2 | 35.67 | 38.07 | −2.40 | −6.74 | 10235.70 |
| 3 | 34.60 | 38.04 | −3.45 | −9.96 | 9928.31 |
| 4 | 38.10 | 38.11 | −0.01 | −0.02 | 10934.30 |
| 5 | 39.04 | 38.30 | 0.74 | 1.89 | 11203.20 |
| Average | −1.54 | −4.44 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bett, D.K.; Ali, I.; Gheith, M.; Eltawil, A. Simulation-Based Optimization of Truck Appointment Systems in Container Terminals: A Dual Transactions Approach with Improved Congestion Factor Representation. Logistics 2024, 8, 80. https://doi.org/10.3390/logistics8030080
Bett DK, Ali I, Gheith M, Eltawil A. Simulation-Based Optimization of Truck Appointment Systems in Container Terminals: A Dual Transactions Approach with Improved Congestion Factor Representation. Logistics. 2024; 8(3):80. https://doi.org/10.3390/logistics8030080
Chicago/Turabian StyleBett, Davies K., Islam Ali, Mohamed Gheith, and Amr Eltawil. 2024. "Simulation-Based Optimization of Truck Appointment Systems in Container Terminals: A Dual Transactions Approach with Improved Congestion Factor Representation" Logistics 8, no. 3: 80. https://doi.org/10.3390/logistics8030080
APA StyleBett, D. K., Ali, I., Gheith, M., & Eltawil, A. (2024). Simulation-Based Optimization of Truck Appointment Systems in Container Terminals: A Dual Transactions Approach with Improved Congestion Factor Representation. Logistics, 8(3), 80. https://doi.org/10.3390/logistics8030080