
Liquid Metal-Based Dual-Response Pressure Sensor for Dual-Modality Sensing and Robotic Object Recognition



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Preparation of Cu-EGaIn
2.2. Preparation of Resistance Pressure Sensor
2.3. Preparation of Capacitive Pressure Sensor
2.4. Characterization and Measurements
3. Results and Discussion
3.1. Design and Fabrication of DRPS
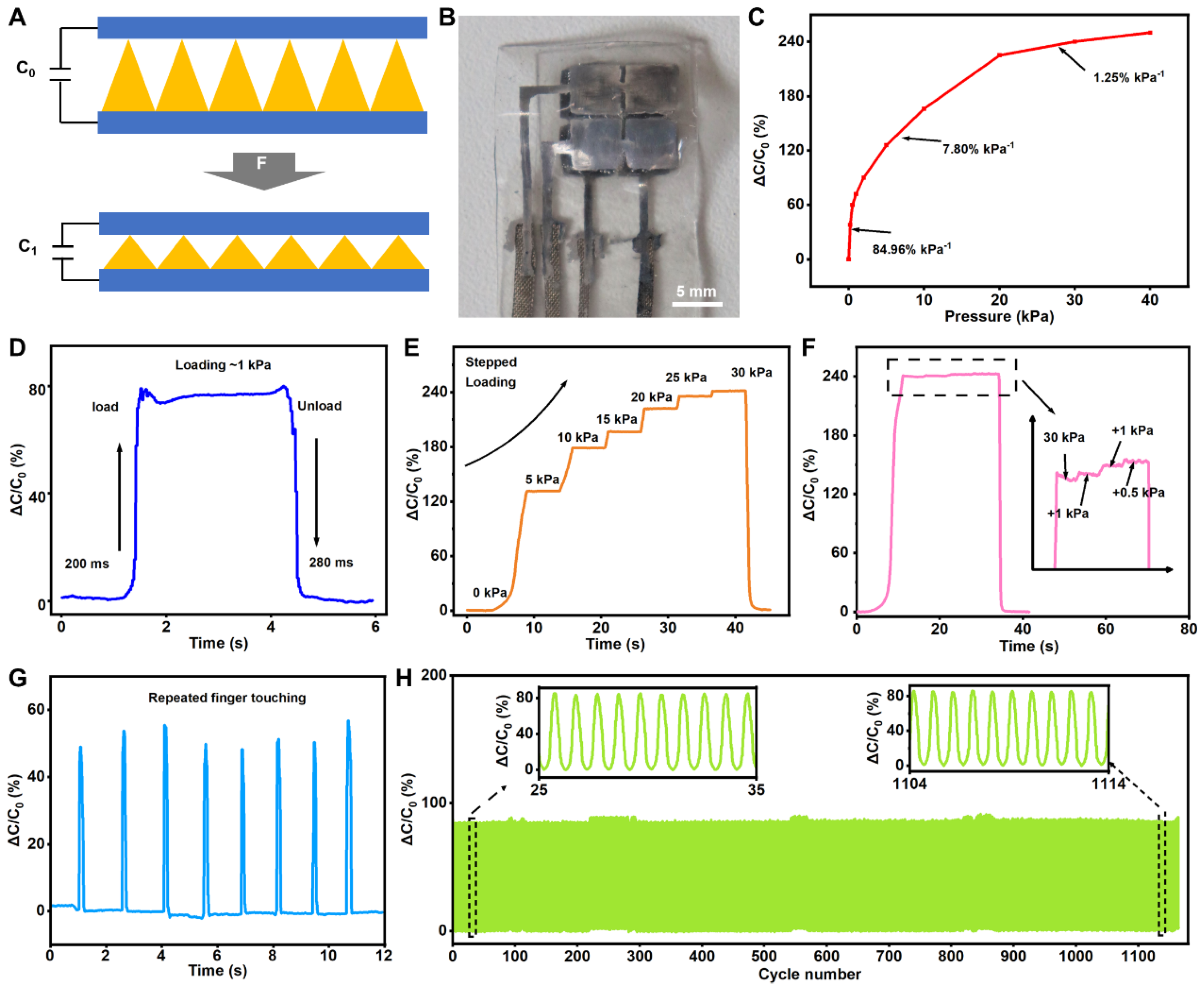
3.2. Characterization of Capacitive Pressure Sensor
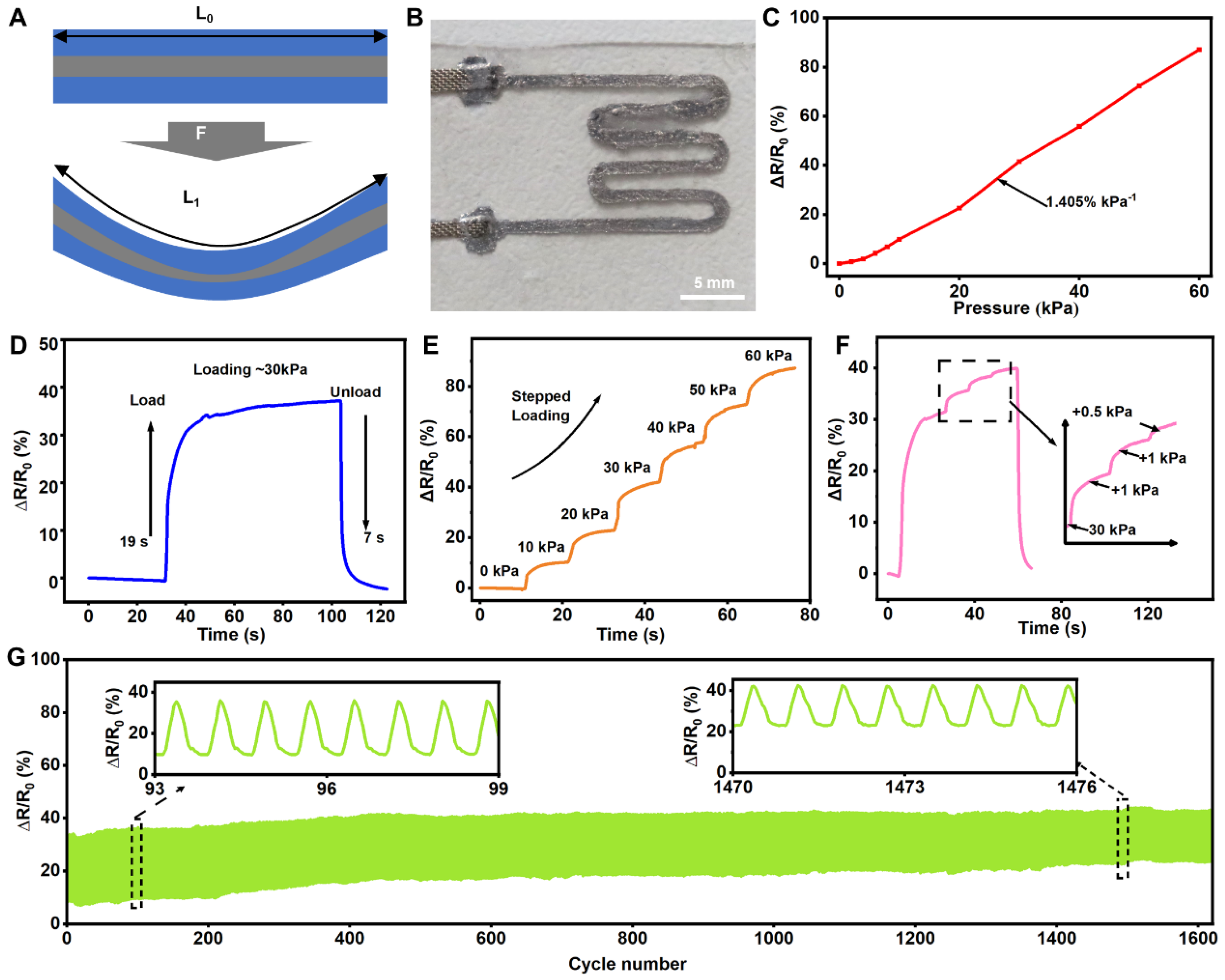
3.3. Characterization of Resistive Pressure Sensors
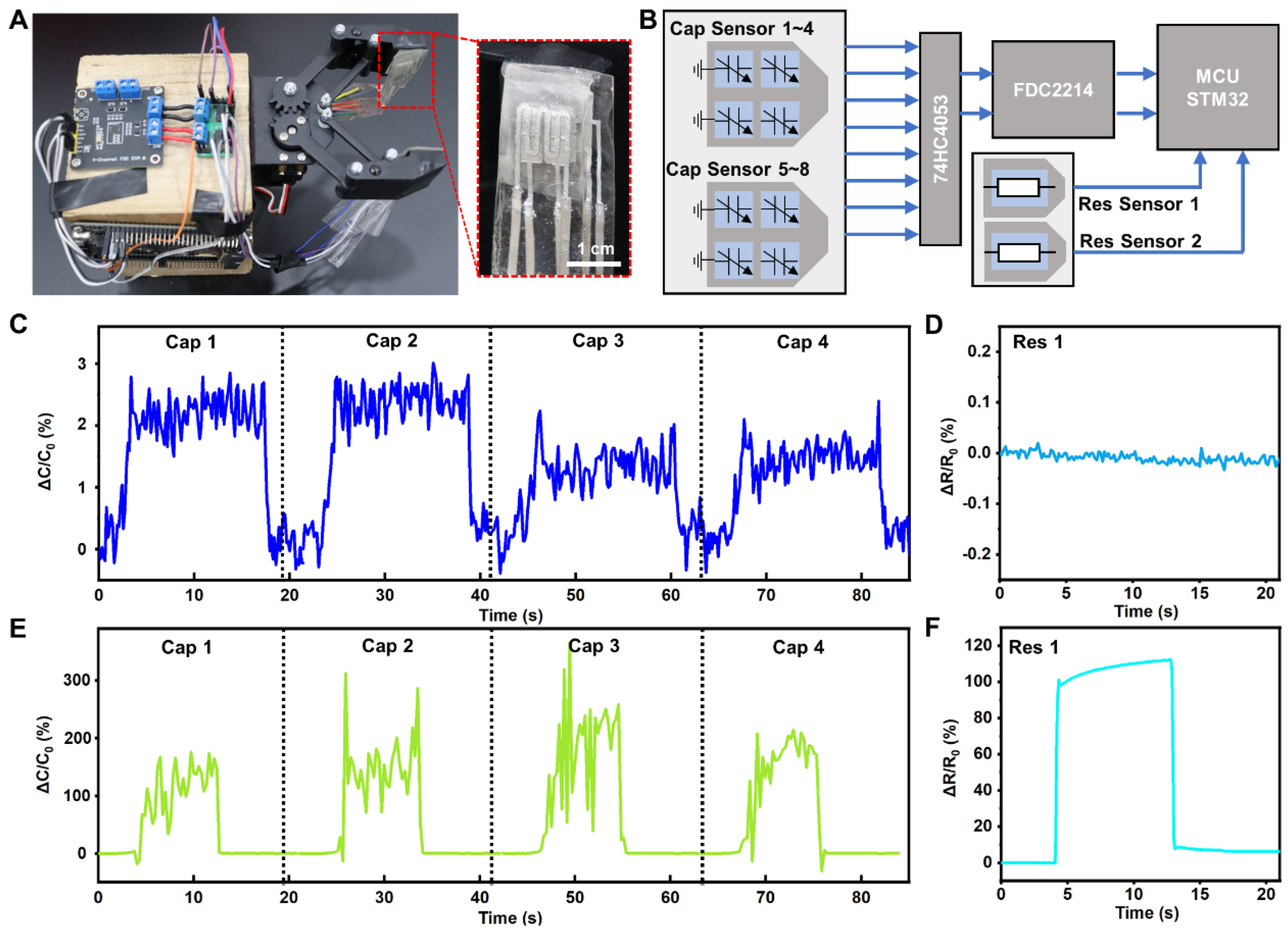
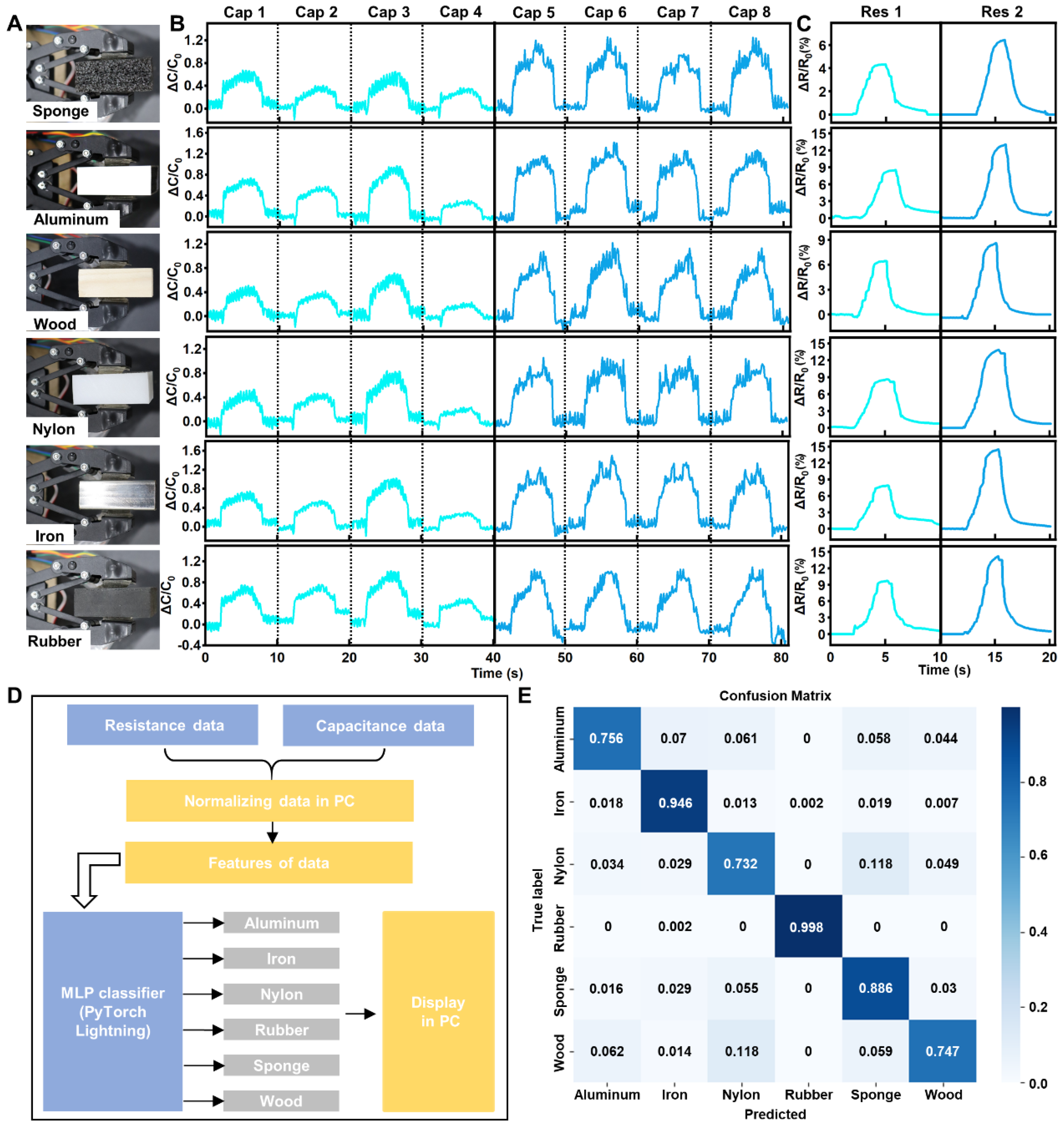
3.4. Applications of DRPS
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiong, Y.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C.P. Fabrication and application of flexible pressure sensors with micro/nano-structures. Prog. Chem. 2019, 31, 800. [Google Scholar]
- De Fazio, R.; Mastronardi, V.M.; Petruzzi, M.; De Vittorio, M.; Visconti, P. Human–machine interaction through advanced haptic sensors: A piezoelectric sensory glove with edge machine learning for gesture and object recognition. Future Internet 2022, 15, 14. [Google Scholar] [CrossRef]
- Maheshwari, V.; Saraf, R. Tactile devices to sense touch on a par with a human finger. Angew. Chem. Int. Ed. 2008, 47, 7808–7826. [Google Scholar] [CrossRef] [PubMed]
- Pyo, S.; Lee, J.; Bae, K.; Sim, S.; Kim, J. Recent progress in flexible tactile sensors for human-interactive systems: From sensors to advanced applications. Adv. Mater. 2021, 33, 2005902. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Zhao, S.; Zhang, X.; Su, Z. Recent progress in flexible pressure sensors based on multiple microstructures: From design to application. Nanoscale 2023, 15, 5111–5138. [Google Scholar] [CrossRef]
- Saxena, A.; Patra, K. Recent developments in stretchable and flexible tactile sensors towards piezoresistive systems: A review. Polym. Adv. Technol. 2024, 35, e6251. [Google Scholar] [CrossRef]
- Fiorillo, A.S.; Critello, C.D.; Pullano, S.A. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Barlian, A.A.; Park, W.T.; Mallon, J.R.; Rastegar, A.J.; Pruitt, B.L. Semiconductor piezoresistance for microsystems. Proc. IEEE 2009, 97, 513–552. [Google Scholar] [CrossRef]
- Jeong, Y.; Park, J.; Lee, J.; Kim, K.; Park, I. Ultrathin, biocompatible, and flexible pressure sensor with a wide pressure range and its biomedical application. ACS Sens. 2020, 5, 481–489. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.B.; Tee, B.C.K.; Stoltenberg, R.M.; Chen, C.V.H.H.; Barman, S.; Muir, B.V.O.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Hong, Y.; Wang, Y.; Zhang, J.; Liu, Q.; Wu, Z.; Guo, C. A highly sensitive flexible capacitive tactile sensor with sparse and high- aspect- ratio microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Cheng, A.J.; Wu, L.; Sha, Z.; Chang, W.; Chu, D.; Wang, C.; Peng, S. Recent advances of capacitive sensors: Materials, microstructure designs, applications, and opportunities. Adv. Mater. Technol. 2023, 8, 2201959. [Google Scholar] [CrossRef]
- Xu, H.; Lv, Y.; Qiu, D.; Zhou, Y.; Zeng, H.; Chu, Y. An ultra-stretchable, highly sensitive and biocompatible capacitive strain sensor from an ionic nanocomposite for on-skin monitoring. Nanoscale 2019, 11, 1570–1578. [Google Scholar] [CrossRef]
- Rim, Y.S.; Bae, S.H.; Chen, H.; De Marco, N.; Yang, Y. Recent progress in materials and devices toward printable and flexible sensors. Adv. Mater. 2016, 28, 4415–4440. [Google Scholar] [CrossRef]
- Zhao, M.H.; Wang, Z.L.; Mao, S.X. Piezoelectric characterization of individual zinc oxide nanobelt probed by piezoresponse force microscope. Nano Lett. 2004, 4, 587–590. [Google Scholar] [CrossRef]
- Dileena, L.; Sreeja SD, B.; Sreekala, C.O. A comparative study on piezoelectric and piezoresistive pressure sensor using COMSOL simulation. Mater. Today Proc. 2021, 46, 3121–3126. [Google Scholar] [CrossRef]
- Dargahi, J.; Parameswaran, M.; Payandeh, S. A micromachined piezoelectric tactile sensor for an endoscopic grasper-theory, fabrication and experiments. J. Microelectromech. Syst. 2000, 9, 329–335. [Google Scholar] [CrossRef]
- Deswal, S.; Khandelwal, G.; Dahiya, R. Molecular ferroelectric based biocompatible flexible piezoelectric pressure sensor. IEEE Sens. Lett. 2023, 7, 2501704. [Google Scholar] [CrossRef]
- Kim, Y.K.; Hwang, S.H.; Seo, H.J.; Jeong, S.M.; Lim, S.K. Effects of biomimetic cross-sectional morphology on the piezoelectric properties of BaTiO3 nanorods-contained PVDF fibers. Nano Energy 2022, 97, 107216. [Google Scholar] [CrossRef]
- Tao, K.; Chen, Z.; Yu, J.; Zeng, H.; Wu, J.; Wu, Z.; Jia, Q.; Li, P.; Fu, Y.; Chang, H.; et al. Ultra- sensitive, deformable, and transparent triboelectric tactile sensor based on micro- pyramid patterned ionic hydrogel for interactive human–machine interfaces. Adv. Sci. 2022, 9, 2104168. [Google Scholar] [CrossRef]
- Cai, Y.W.; Zhang, X.N.; Wang, G.G.; Li, G.Z.; Zhao, D.Q.; Sun, N.; Li, F.; Zhang, H.Y.; Han, J.C.; Yang, Y. A flexible ultra-sensitive triboelectric tactile sensor of wrinkled PDMS/MXene composite films for E-skin. Nano Energy 2021, 81, 105663. [Google Scholar] [CrossRef]
- Lei, H.; Chen, Y.; Gao, Z.; Wen, Z.; Sun, X. Advances in self-powered triboelectric pressure sensors. J. Mater. Chem. A 2021, 9, 20100–20130. [Google Scholar] [CrossRef]
- Luo, Y.; Abidian, M.R.; Ahn, J.H.; Akinwande, D.; Andrews, A.M.; Antonietti, M.; Bao, Z.; Berggren, M.; Berkey, C.A.; Bettinger, C.J.; et al. Technology roadmap for flexible sensors. ACS Nano 2023, 17, 5211–5295. [Google Scholar] [CrossRef]
- Zhu, B.; Niu, Z.; Wang, H.; Leow, W.R.; Li, Y.; Zheng, L.; Wei, J.; Huo, F.; Chen, X. Microstructured graphene arrays for highly sensitive flexible tactile sensors. Small 2014, 10, 3625–3631. [Google Scholar] [CrossRef] [PubMed]
- Pan, L.; Chortos, A.; Yu, G.; Wang, Y.; Isaacson, S.; Allen, R.; Shi, Y.; Dauskardt, R.; Bao, Z. An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film. Nat. Commun. 2014, 5, 3002. [Google Scholar] [CrossRef]
- Zhao, J.; Guo, H.; Liu, H.; Fu, T.; Zhou, W.; Zhu, Z.; Hu, Q. Carbon nanotube network topology-enhanced iontronic capacitive pressure sensor with high linearity and ultrahigh sensitivity. ACS Appl. Mater. Interfaces 2023, 15, 47327–47337. [Google Scholar] [CrossRef]
- Ma, J.; Huang, H.; Li, B. Wavy-shaped flexible capacitive strain sensor for multiple deformations recognition. Sens. Actuators A Phys. 2024, 366, 115025. [Google Scholar] [CrossRef]
- Bae, S.H.; Lee, Y.; Sharma, B.K.; Lee, H.J.; Kim, J.H.; Ahn, J.H. Graphene-based transparent strain sensor. Carbon 2013, 51, 236–242. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, X.; Zhong, Y.; Zhao, X.; Lin, S.; Li, J.; Li, X.; Xu, J.; Li, Z.; Zhu, H. A wearable and highly sensitive graphene strain sensor for precise home-based pulse wave monitoring. ACS Sens. 2017, 2, 967–974. [Google Scholar] [CrossRef]
- Kang, D.Y.; Kim, Y.S.; Ornelas, G.; Sinha, M.; Naidu, K.; Coleman, T.P. Scalable microfabrication procedures for adhesive-integrated flexible and stretchable electronic sensors. Sensors 2015, 15, 23459–23476. [Google Scholar] [CrossRef]
- Niu, H.; Wei, X.; Li, H.; Yin, F.; Wang, W.; Seong, R.; Shin, Y.K.; Yao, Z.; Li, Y.; Kim, E.-S.; et al. Micropyramid array bimodal electronic skin for iIntelligent material and surface shape perception based on capacitive sensing. Adv. Sci. 2024, 11, 2305528. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Liu, J. Pervasive liquid metal printed electronics: From concept incubation to industry. iScience 2021, 24, 102026. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Ma, B.; Chen, Y.; Zhang, J.; Liu, H. Soft robots with plant-inspired gravitropism based on fluidic liquid metal. Adv. Sci. 2024, 11, 2306129. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Zhao, X.; Li, J.; Guo, R.; Zhou, Y.; Liu, J. Gallium-based liquid metal amalgams: Transitional-state metallic mixtures (TransM2ixes) with enhanced and tunable electrical, thermal, and mechanical properties. ACS Appl. Mater. Interfaces 2017, 9, 35977–35987. [Google Scholar] [CrossRef] [PubMed]
- Deng, Y.; Bu, F.; Wang, Y.; Chee, P.S.; Liu, X.; Guan, C. Stretchable liquid metal based biomedical devices. npj Flex. Electron. 2024, 8, 12. [Google Scholar] [CrossRef]
- Rahman, M.; Tiwari, A.; Agnew, S.; Scheideler, W.J. 3D woven liquid metals for radio-frequency stretchable circuits. Adv. Mater. Technologies. 2024, 9, 2400339. [Google Scholar] [CrossRef]
- Ren, L.; Zhang, B.-W. Room temperature liquid metals for flexible alkali metal-chalcogen batteries. Exploration 2022, 2, 20210182. [Google Scholar] [CrossRef]
- Handschuh-Wang, S.; Gan, T.; Wang, T.; He, B.; Han, P.; Stadler, F.J.; Zhou, X. Vibration-enabled mobility of liquid metal. Adv. Funct. Mater. 2024, 34, 2313474. [Google Scholar] [CrossRef]
- Yang, C.; Ma, X.; Zhou, X.; Lin, Y.; Huang, W.; Chen, X.; Wang, Q.; Lu, Q.; Xu, Y.; Ning, X.; et al. Ultrastretchable transparent electrodes of liquid metal serpentine micromeshes. ACS Mater. Lett. 2024, 6, 3124–3132. [Google Scholar] [CrossRef]
- Baek, S.; Jang, H.; Kim, S.Y.; Jeong, H.; Han, S.; Jang, Y.; Kim, D.H.; Lee, H.S. Flexible piezocapacitive sensors based on wrinkled microstructures: Toward low-cost fabrication of pressure sensors over large areas. RSC Adv. 2017, 7, 39420–39426. [Google Scholar] [CrossRef]
- Jang, Y.; Jo, J.; Woo, K.; Lee, S.-H.; Kwon, S.; Kim, H.; Lee, H.S. Fabrication of highly sensitive piezocapacitive pressure sensors using a simple and inexpensive home milk frother. Phys. Rev. Appl. 2019, 11, 014037. [Google Scholar] [CrossRef]
- Bijender; Kumar, A. Flexible and wearable capacitive pressure sensor for blood pressure monitoring. Sens. Bio-Sens. Res. 2021, 33, 10043. [Google Scholar] [CrossRef]
- Wang, X.; Guo, R.; Liu, J. Liquid metal based soft robotics: Materials, designs, and applications. Adv. Mater. Technol. 2019, 4, 1800549. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Y.; Wang, Z.; Zhang, Y.; Guo, R.; Li, X. Liquid Metal-Based Dual-Response Pressure Sensor for Dual-Modality Sensing and Robotic Object Recognition. Bioengineering 2024, 11, 1211. https://doi.org/10.3390/bioengineering11121211
Bai Y, Wang Z, Zhang Y, Guo R, Li X. Liquid Metal-Based Dual-Response Pressure Sensor for Dual-Modality Sensing and Robotic Object Recognition. Bioengineering. 2024; 11(12):1211. https://doi.org/10.3390/bioengineering11121211
Chicago/Turabian StyleBai, Yanru, Zhi Wang, Yizhuo Zhang, Rui Guo, and Xisheng Li. 2024. "Liquid Metal-Based Dual-Response Pressure Sensor for Dual-Modality Sensing and Robotic Object Recognition" Bioengineering 11, no. 12: 1211. https://doi.org/10.3390/bioengineering11121211
APA StyleBai, Y., Wang, Z., Zhang, Y., Guo, R., & Li, X. (2024). Liquid Metal-Based Dual-Response Pressure Sensor for Dual-Modality Sensing and Robotic Object Recognition. Bioengineering, 11(12), 1211. https://doi.org/10.3390/bioengineering11121211