
A Review on PolSAR Decompositions for Feature Extraction


Abstract
1. Introduction
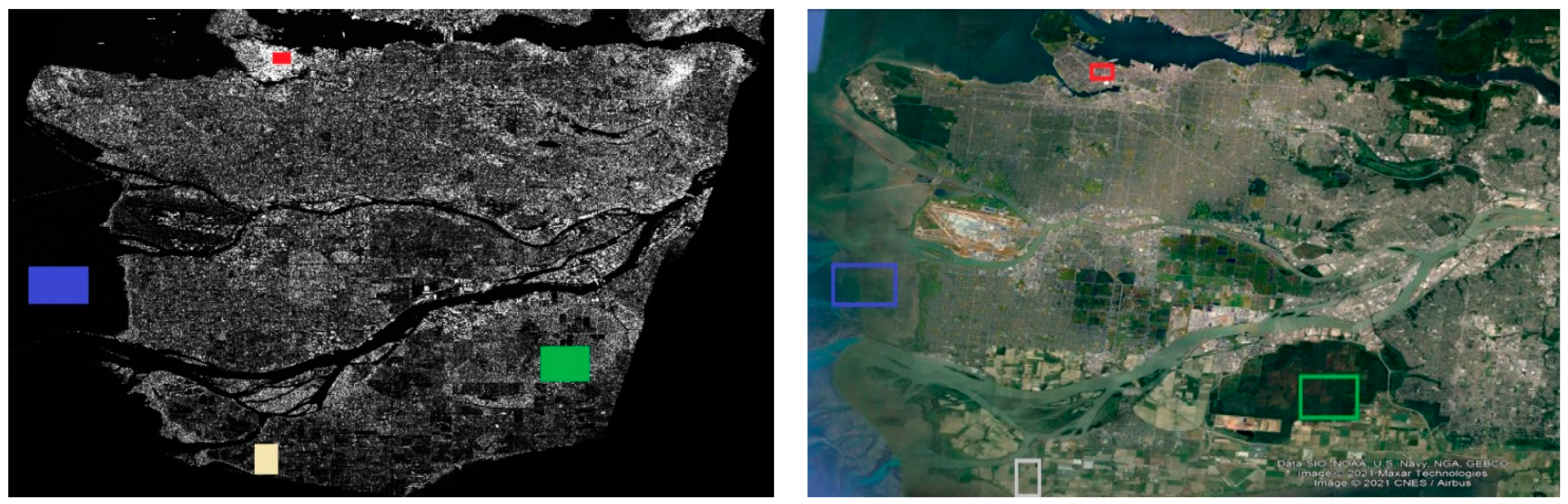
2. Dataset and Preprocessing
3. Coherent Target Decomposition
3.1. Pauli Target Decomposition
- (a)
- The single or odd bounce scattering mechanism, also referred to as the plate, sphere, or trihedral scattering mechanism, corresponds to the component.
- (b)
- The diplane scattering mechanism, also referred to as dihedral scattering or, in general cases, as double or even bounce scattering from corners with a relative orientation of , is presented by the ;
- (c)
- and with a relative orientation of , corresponds to the component.
- (d)
- The Antisymmetric mechanisms are depicted via the component.
3.2. Cameron Target Decomposition
4. Model-Based Decomposition
4.1. Freeman–Durden Decomposition
- (a)
- The canopy scatter from a cloud of randomly oriented dipoles or volume.
- (b)
- The even or double bounce scatter from a pair of orthogonal surfaces with different dielectric constants and
- (c)
- The Bragg scatter from a moderately rough surface.
4.2. Yamaguchi Decomposition
5. Eigenvector–Eigenvalue Decomposition
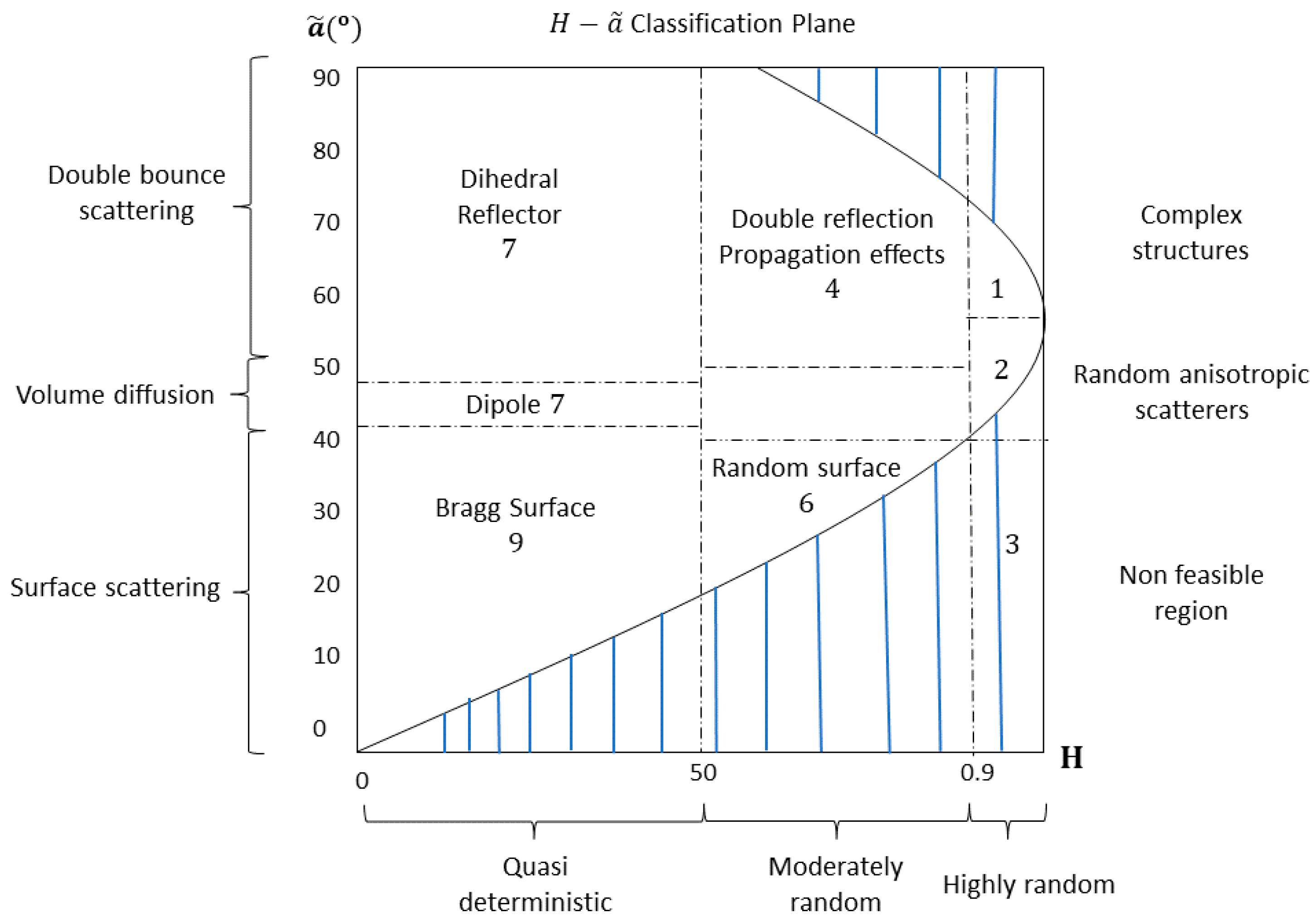
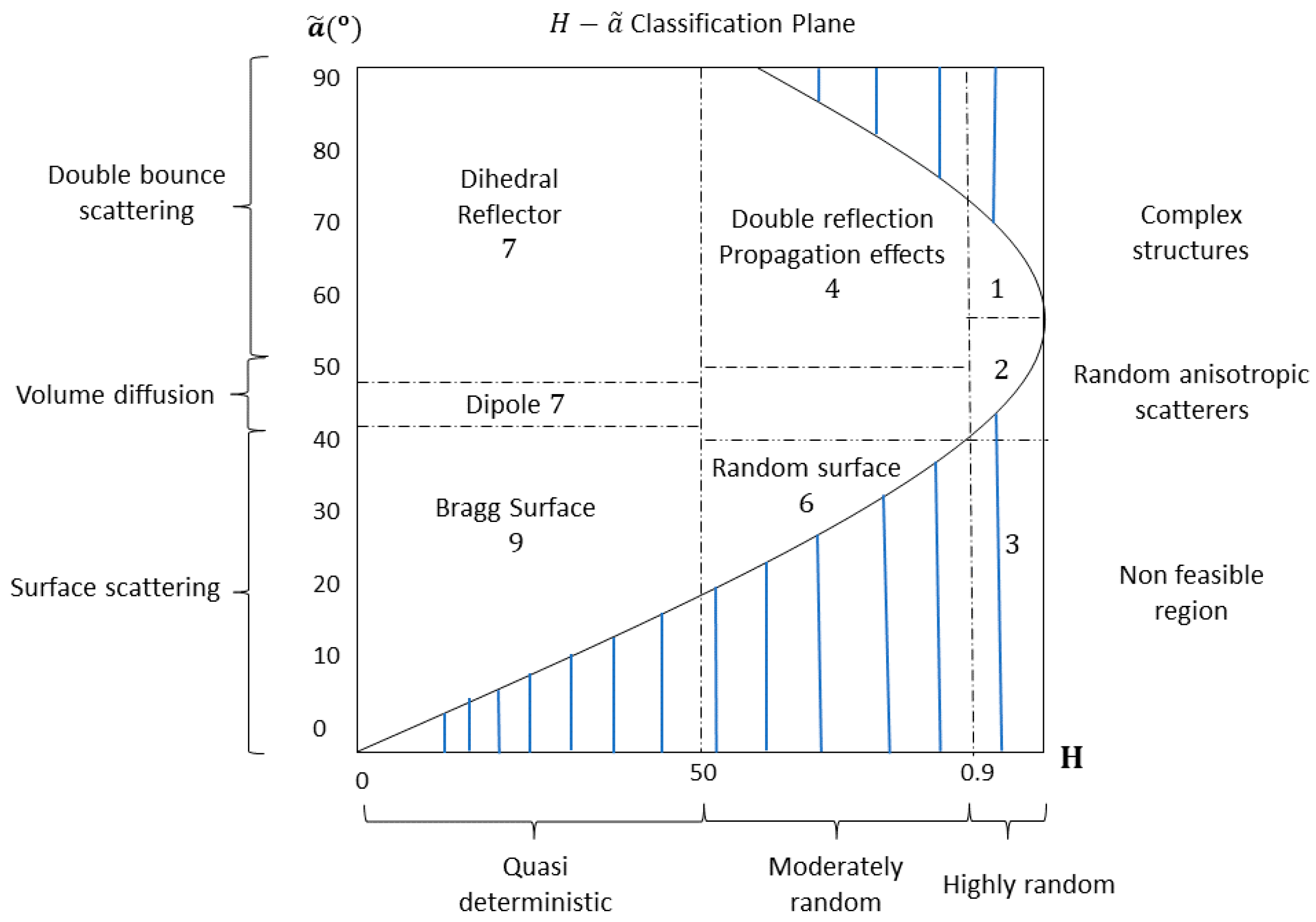
5.1. H/A/a. Decomposition
- for the target is a plate;
- for the target is a dipole;
- for the target is a dihedral.
5.2. H/alpha. Feature Space
6. The Double Scatterer Model
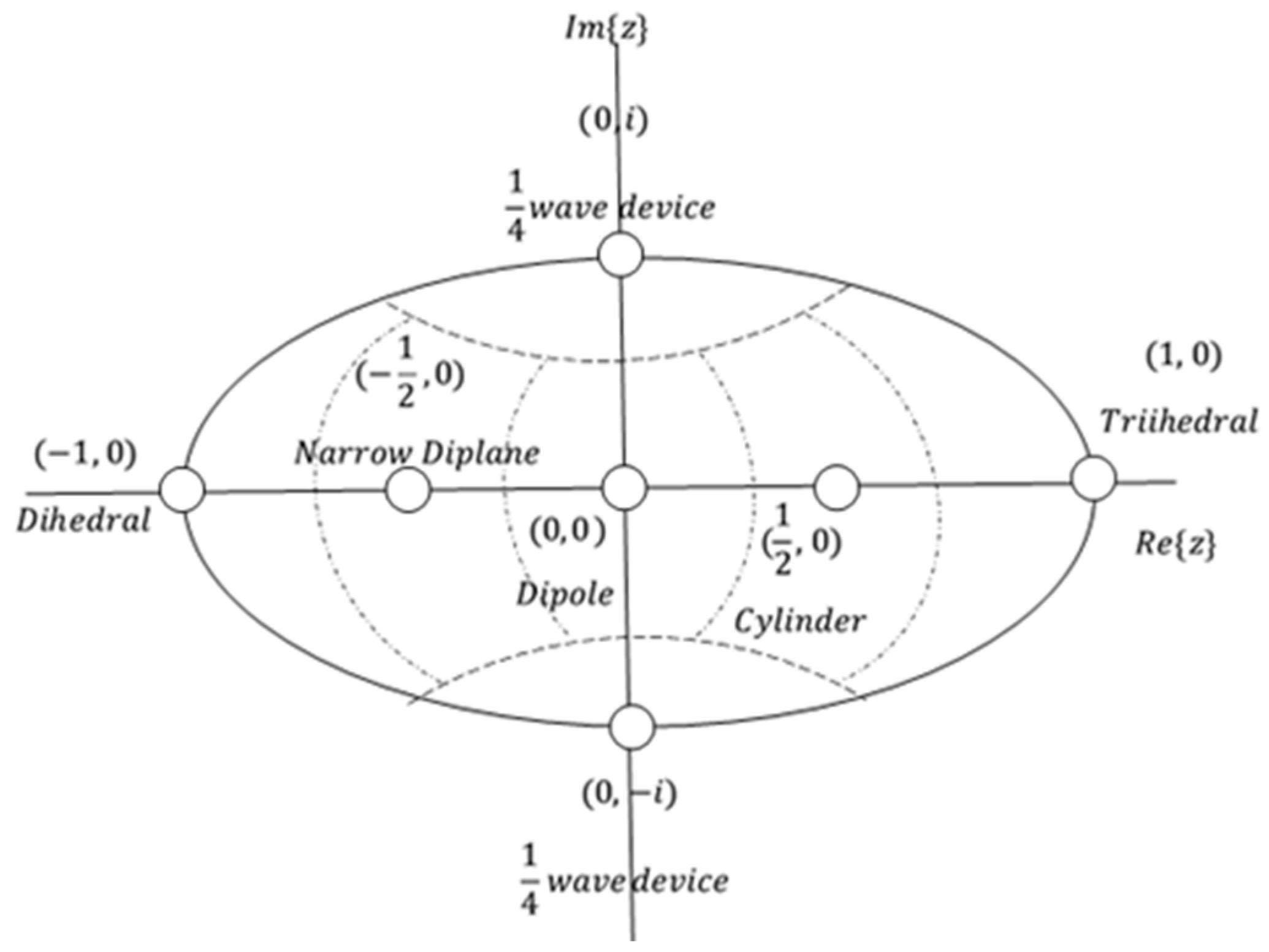
- For each PolSAR cell, the corresponding polarimetric scattering matrix is utilized following Cameron’s stepwise algorithm to calculate the complex parameter . If the criteria of reciprocity and symmetry are satisfied, the maximum symmetric component of the scattering matrix can be defined as follows:
- 2.
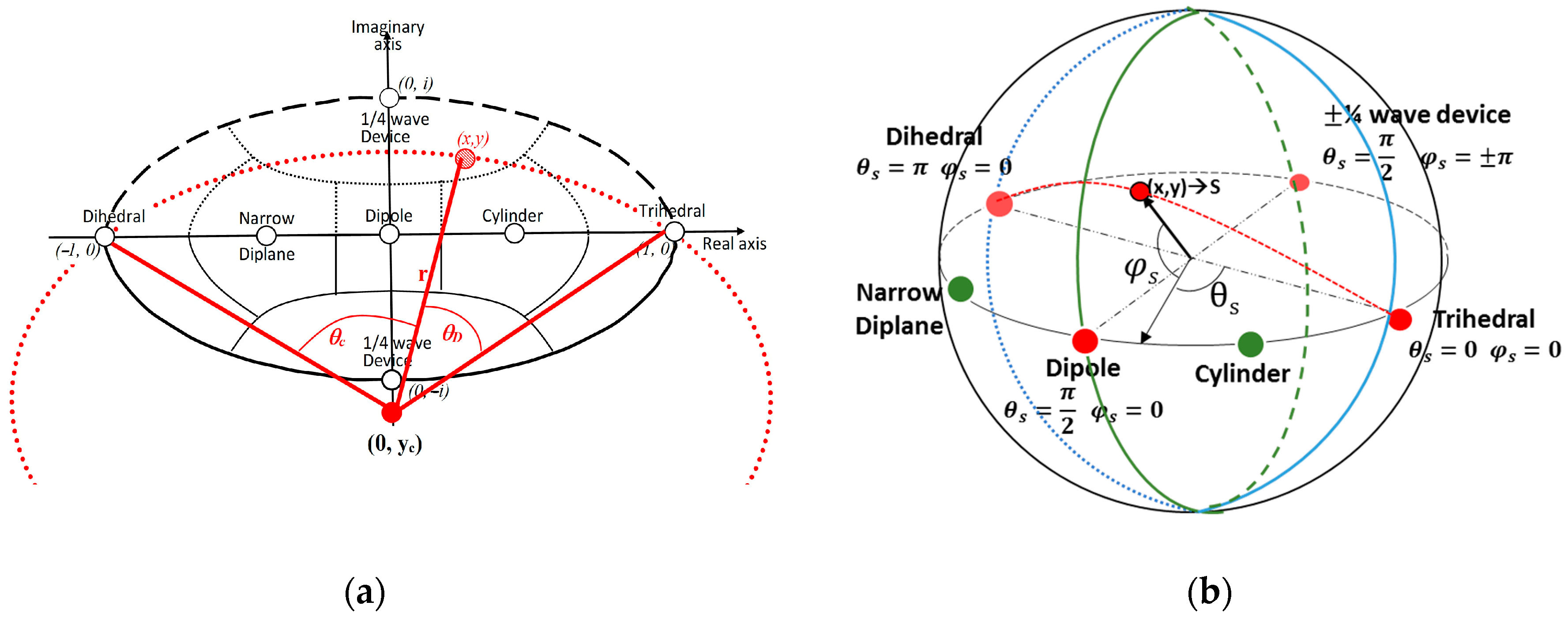
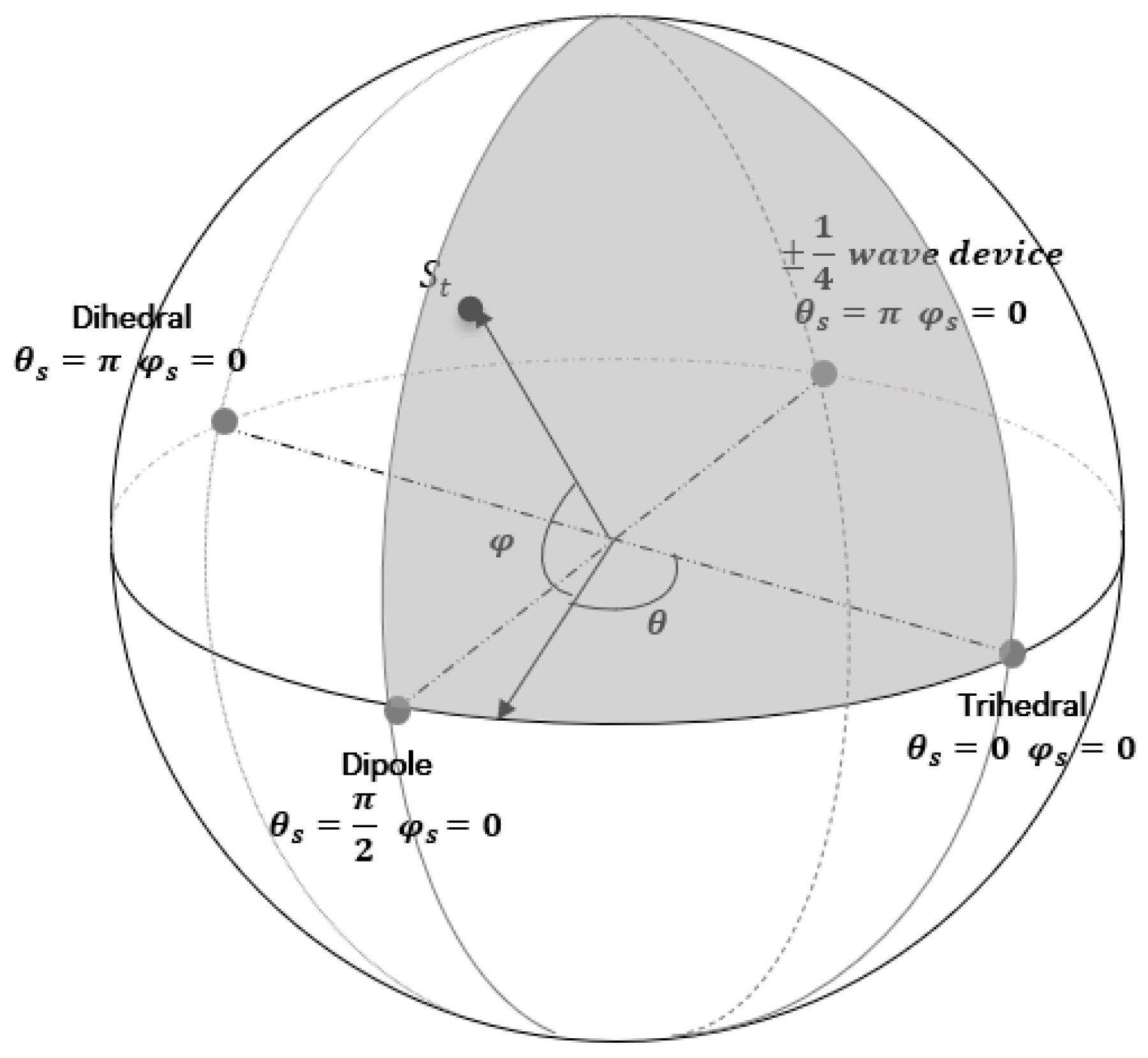
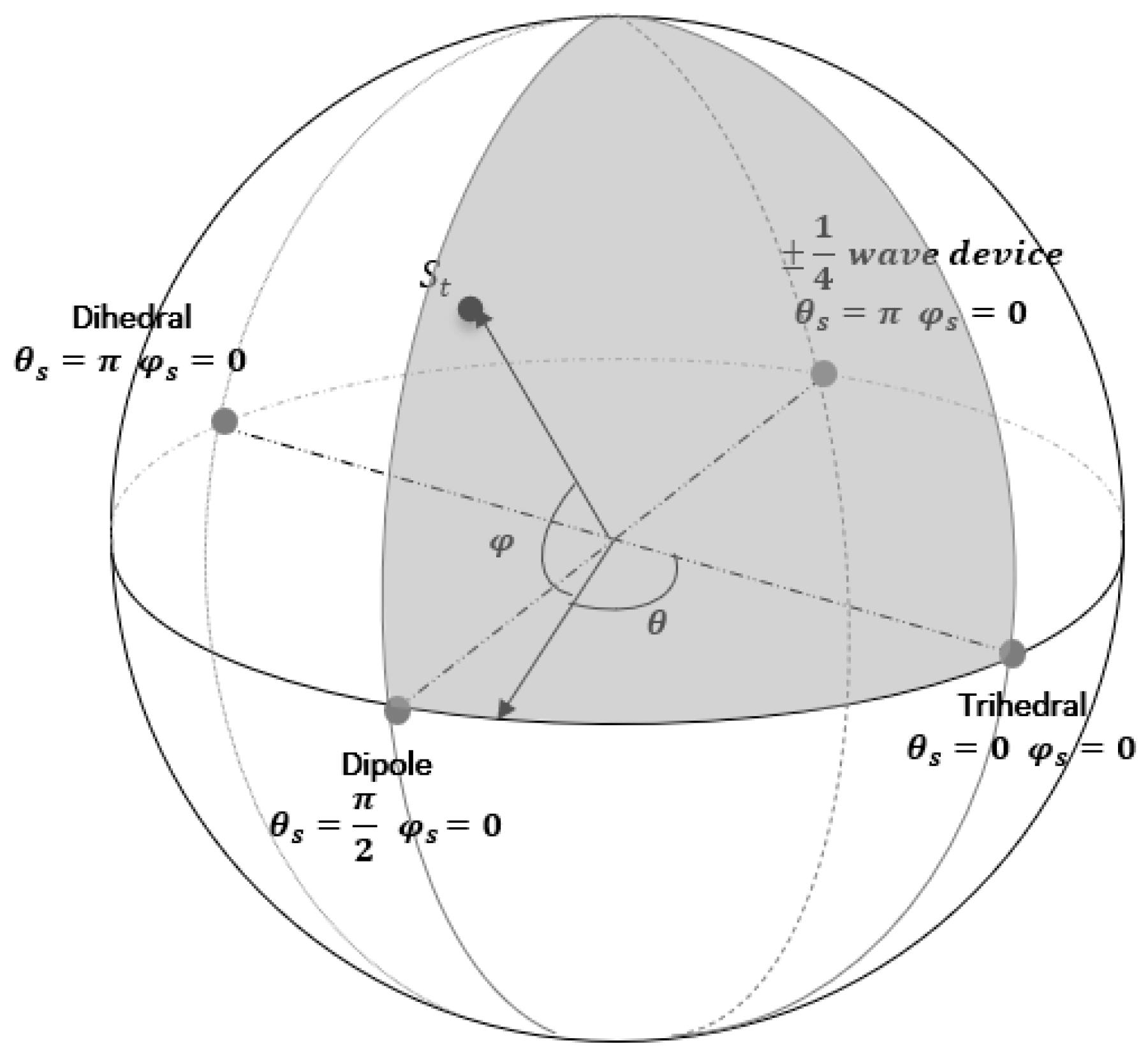
- The process of mapping a point from the complex unit disk onto the surface of the unit sphere is elucidated here. The PolSAR cell being studied, along with its scattering matrix, is now represented by the longitude and the latitude on the unit sphere (Figure 12).
- 3.
- According to Poelman [73], the fundamental scattering characteristics of Cylinder and Narrow Diplane can be described as a linear combination of other elementary scattering mechanisms outlined in the Cameron classification scheme. Specifically, these scatterers encompass the trihedral, dihedral, and dipole:
- 4.
- As the scattering mechanisms of Cylinder and Narrow Diplane can be composed of Trihedral, Dipole, and Dihedral, these three, along with the ¼ wave device, are considered fundamental scattering mechanisms. This assertion led us to dismiss the scattering mechanisms of the Cylinder and Narrow Diplane as having minimal significance and update the spherical topology as depicted in Figure 12. Based on the angle coordinates of the point being analyzed, the identification of the right-angled spherical triangle it pertains to is established. Depending on its placement relative to the equator, one vertex of the triangle remains the pole of the sphere, while the other two vertices represent the closest scattering mechanisms determined using the orthodromic or great circle distance :
- 5.
- The vector, originating from the center of the sphere and terminating at the coordinates on the spherical shell, is projected onto the equator level to which the reference scattering mechanisms belong, based on the angle (Figure 12). Specifically, the projection is confined within the quadrant delimited by the center of the sphere and the two nearest scatterers to the examination point.
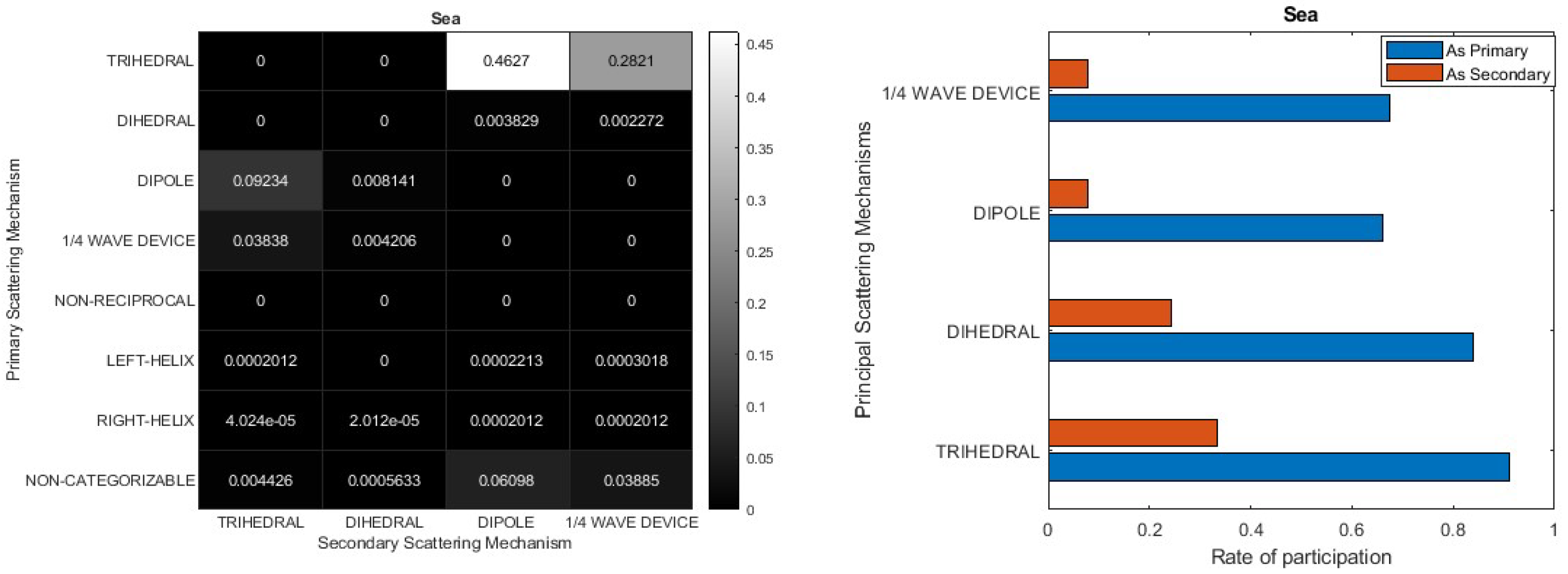
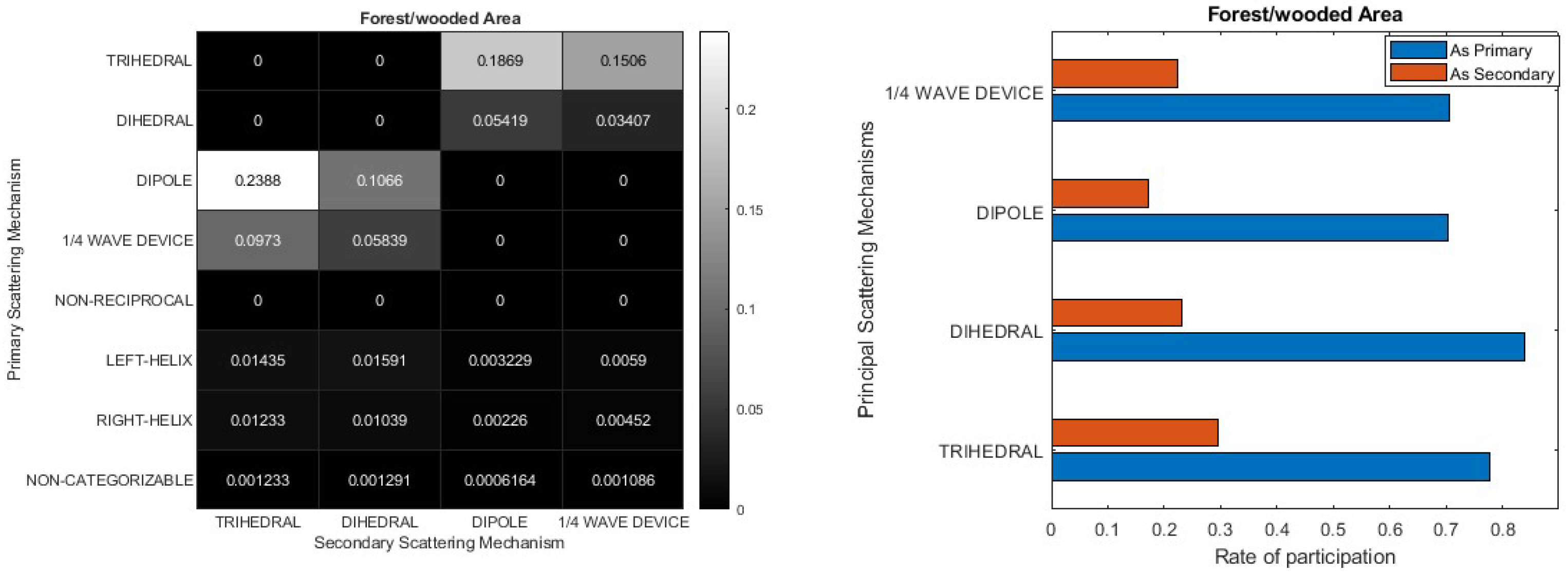
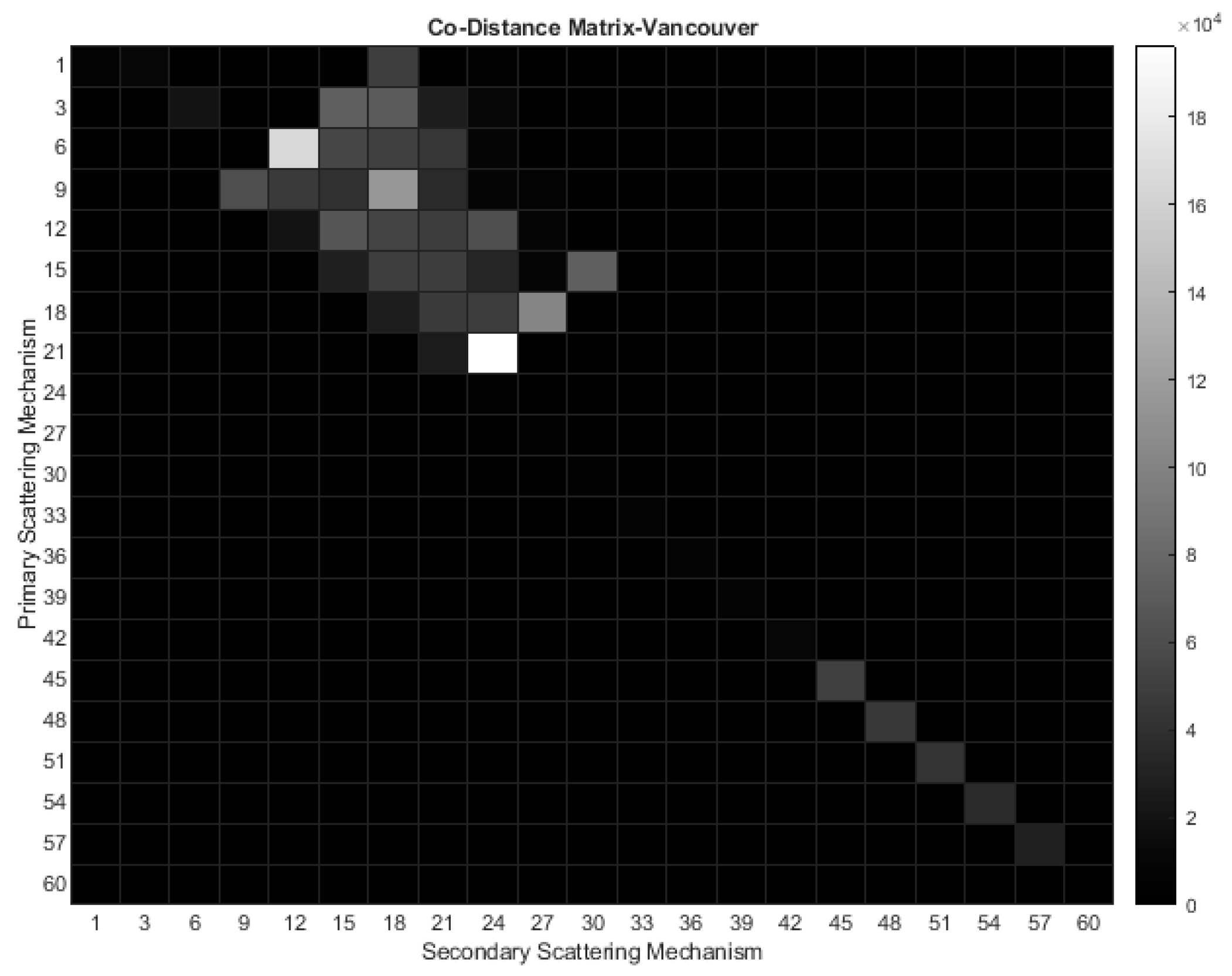
- 6.
- An immediate outcome is the analysis of the vector’s projection into two vertical components, signifying the presence of the two nearest scattering mechanisms.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Iverson, L.R.; Graham, R.L.; Cook, E.A. Applications of satellite remote sensing to forested ecosystems. Landsc. Ecol. 1989, 3, 131–143. [Google Scholar] [CrossRef]
- Wilson, J.S.; Clay, M.; Martin, E.; Stuckey, D.; Vedder-Risch, K. Evaluating environmental influences of zoning in urban ecosystems with remote sensing. Remote Sens. Environ. 2003, 86, 303–321. [Google Scholar] [CrossRef]
- Smith, A.M.S.; Kolden, C.A.; Tinkham, W.T.; Talhelm, A.F.; Marshall, J.D.; Hudak, A.T.; Boschetti, L.; Falkowski, M.J.; Greenberg, J.A.; Anderson, J.W.; et al. Remote sensing the vulnerability of vegetation in natural terrestrial ecosystems. Remote Sens. Environ. 2014, 154, 322–337. [Google Scholar] [CrossRef]
- Klemas, V. Remote Sensing Techniques for Studying Coastal Ecosystems: An Overview. J. Coast. Res. 2011, 27, 2–17. [Google Scholar] [CrossRef]
- Smith, W.K.; Dannenberg, M.P.; Yan, D.; Herrmann, S.; Barnes, M.L.; Barron-Gafford, G.A.; Biederman, J.A.; Ferrenberg, S.; Fox, A.M.; Hudson, A.; et al. Remote sensing of dryland ecosystem structure and function: Progress, challenges, and opportunities. Remote Sens. Environ. 2019, 233, 111401. [Google Scholar] [CrossRef]
- El Mahrad, B.; Newton, A.; Icely, J.D.; Kacimi, I.; Abalansa, S.; Snoussi, M. Contribution of Remote Sensing Technologies to a Holistic Coastal and Marine Environmental Management Framework: A Review. Remote Sens. 2020, 12, 2313. [Google Scholar] [CrossRef]
- Pettorelli, N.; Schulte to Bühne, H.; Tulloch, A.; Dubois, G.; Macinnis-Ng, C.; Queirós, A.M.; Keith, D.A.; Wegmann, M.; Schrodt, F.; Stellmes, M.; et al. Satellite remote sensing of ecosystem functions: Opportunities, challenges and way forward. Remote Sens. Ecol. Conserv. 2018, 4, 71–93. [Google Scholar] [CrossRef]
- Mather, P.M. Computer Processing of Remotely Sensed Images: An Introduction, 3rd ed.; Wiley: Chichester, UK, 2004. [Google Scholar]
- Jensen, J.R.; Lulla, K. Introductory digital image processing: A remote sensing perspective. Geocarto Int. 1987, 2, 1–65. [Google Scholar] [CrossRef]
- Liu, H.; Yang, S.; Gou, S.; Zhu, D.; Wang, R.; Jiao, L. Polarimetric SAR Feature Extraction with Neighborhood Preservation-Based Deep Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1456–1466. [Google Scholar] [CrossRef]
- Ul Din, S.; Mak, H.W.L. Retrieval of Land-Use/Land Cover Change (LUCC) Maps and Urban Expansion Dynamics of Hyderabad, Pakistan via Landsat Datasets and Support Vector Machine Framework. Remote Sens. 2021, 13, 3337. [Google Scholar] [CrossRef]
- Petrovska, B.; Zdravevski, E.; Lameski, P.; Corizzo, R.; Štajduhar, I.; Lerga, J. Deep Learning for Feature Extraction in Remote Sensing: A Case-Study of Aerial Scene Classification. Sensors 2020, 20, 3906. [Google Scholar] [CrossRef]
- Liu, C.; Yin, J.; Yang, J. Application of deep learning to polarimetric SAR classification. In Proceedings of the IET International Radar Conference 2015, Hangzhou, China, 14–16 October 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Yang, J.; Yamaguchi, Y.; Lee, J.-S.; Touzi, R.; Boerner, W.-M. Applications of polarimetric SAR. J. Sens. 2015, 2015, 316391. [Google Scholar] [CrossRef]
- Lee, J.-S.; Ainsworth, T.L. An overview of recent advances in Polarimetric SAR information extraction: Algorithms and applications. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 851–854. [Google Scholar] [CrossRef]
- Touzi, R.; Boerner, W.M.; Lee, J.S.; Lueneburg, E. A review of polarimetry in the context of synthetic aperture radar: Concepts and information extraction. Can. J. Remote Sens. 2004, 30, 380–407. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging, 1st ed.; CRC Press: New York, NY, USA, 2009. [Google Scholar]
- López-Martínez, C. Pottier EBasic Principles of SAR Polarimetry. In Polarimetric Synthetic Aperture Radar. Remote Sensing and Digital Image Processing; Hajnsek, I., Desnos, Y.L., Eds.; Springer: Cham, Switzerland, 2021; Volume 25. [Google Scholar] [CrossRef]
- Krogager, E. New decomposition of the radar target scattering matrix. Electron. Lett. 1990, 26, 1525–1527. [Google Scholar] [CrossRef]
- Cameron, W.L.; Leung, L.K. Feature Motivated Polarization Scattering Matrix Decomposition. In Proceedings of the IEEE International Radar Conference, Arlington, Virginia, 7–10 May 1990. [Google Scholar]
- Cameron, W.L.; Youssef, N.N.; Leung, L.K. Simulated Polarimetric Signatures of Primitive Geometrical Shapes. IEEE Trans. Geosc. Rem. Sens. 1996, 34, 793–803. [Google Scholar] [CrossRef]
- Cameron, W.L.; Rais, H. Conservative Polarimetric Scatterers and Their Role in Incorrect Extensions of the Cameron Decomposition. IEEE Trans. Geosc. Rem. Sens. 2006, 44, 3506–3516. [Google Scholar] [CrossRef]
- Huynen, J.R. Phenomenological Theory of Radar Targets. Ph.D. Thesis, TU Delft Repository, Delft, The Netherlands, 1970. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Rem. Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Rem. Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Van Zyl, J.J.; Arii, M.; Kim, Y. Model-based decomposition of polarimetric SAR covariance matrices constrained for nonnegative eigenvalues. IEEE Trans. Geosc. Rem. Sens. 2011, 49, 3452–3459. [Google Scholar] [CrossRef]
- Eltoft, T.; Doulgeris, A.P. Model-Based Polarimetric Decomposition with Higher Order Statistics. IEEE Trans. Geosci. Rem. Sens. Lett. 2019, 16, 992–996. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, L.; Zou, B. A new Six-Component Decomposition based on New Volume Scattering Models for PolSAR Image. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 631–634. [Google Scholar] [CrossRef]
- Singh, G.; Malik, R.; Mohanty, S.; Singh Rathore, V.; Yamada, K.; Umemura, M.; Yamaguchi, Y. Seven-Component Scattering Power Decomposition of POLSAR Coherency Matrix. IEEE Trans. Geosci. Rem. Sens. 2019, 57, 8371–8382. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric sar. IEEE Trans. Geosci. Rem. Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Gui, R.; Xu, X.; Wang, L.; Yang, R.; Pu, F. Eigenvalue Statistical Components-Based PU-Learning for PolSAR Built-Up Areas Extraction and Cross-Domain Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3192–3203. [Google Scholar] [CrossRef]
- Addabbo, P.; Biondi, F.; Clemente, C.; Orlando, D.; Pallotta, L. Classification of covariance matrix eigenvalues in polarimetric SAR for environmental monitoring applications. IEEE Trans. Aerosp. Electron. Syst. Magaz. 2019, 34, 28–43. [Google Scholar] [CrossRef]
- Karachristos, K.; Koukiou, G.; Anastassopoulos, V. PolSAR Cell Information Representation by a Pair of Elementary Scatterers. Remote Sens. 2022, 14, 695. [Google Scholar] [CrossRef]
- RADARSAT-2 Product Description; RN-SP-52-1238 Issue 1/14; MDA Ltd.: Richmond, BC, Canada, 2018.
- Mandal, D.; Vaka, D.S.; Bhogapurapu, N.R.; Vanama, V.S.K.; Kumar, V.; Rao, Y.S.; Bhattacharya, A. Sentinel-1 SLC Preprocessing Workflow for Polarimetric Applications: A Generic Practice for Generating Dual-pol Covariance Matrix Elements in SNAP S-1 Toolbox. Preprints 2019, 2019110393. [Google Scholar] [CrossRef]
- Younis, M. 6th ESA Advances Training Course on Land Remote Sensing, Synthetic Aperture Radar (SAR): Principles and Applications; German Aerospace Center (DLR): Cologne, Germany, 2015. [Google Scholar]
- European Space Agency. 2018. Available online: https://earth.esa.int (accessed on 15 December 2021).
- Maitra, S. Analysis of Polarimetric Synthetic Aperture Radar and Passive Visible Light Polarimetric Imaging Data Fusion for Remote Sensing Applications. Ph.D. Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2013. [Google Scholar]
- Okwuashi, O.; Ndehedehe, C.E.; Olayinka, D.N.; Eyoh, A.; Attai, H. Deep support vector machine for PolSAR image classification. Int. J. Remote Sens. 2021, 42, 6498–6536. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Y.; Zhu, L. Land Cover Classification for Polarimetric SAR Image Using Convolutional Neural Network and Superpixel. Prog. Electromagn. Res. B 2019, 83, 111–128. [Google Scholar] [CrossRef]
- Fan, W.; Zhou, F.; Bai, X.; Tao, M.; Tian, T. Ship Detection Using Deep Convolutional Neural Networks for PolSAR Images. Remote Sens. 2019, 11, 2862. [Google Scholar] [CrossRef]
- Mahgoun, H.; Chaffa, N.E.; Ouarzeddine, M.; Souissi, B. Application of Polarimetric-SAR Decompositions on RADARSAT-2 Fine Quad-Pol Images to Enhance the Performances of Ships Detection Algorithms. Sens. Imaging 2020, 21, 56. [Google Scholar] [CrossRef]
- Ringrose, R.; Harris, N. Ship Detection Using Polarimetric SAR Data. Eur. Space Agency Esa Sp. 2000, 450, 687. [Google Scholar]
- Kouroupis, G.; Anastassopoulos, V. A polarimetric CFAR ship detector based on the joint probability function of simulated first-order Markov chains. Int. J. Remote Sens. 2019, 40, 5121–5140. [Google Scholar] [CrossRef]
- Koukiou, G.; Anastassopoulos, V. Fully Polarimetric Land Cover Classification based on Markov Chains. Adv. Remote Sens. 2021, 10, 47–65. [Google Scholar] [CrossRef]
- Karachristos, K.; Koukiou, G.; Anastassopoulos, V. Fully Polarimetric Land Cover Classification Based on Hidden Markov Models Trained with Multiple Observations. Adv. Remote Sens. 2021, 10, 102–114. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Rem. Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Li, K.; Brisco, B.; Yun, S.; Touzi, R. Polarimetric decomposition with RADARSAT-2 for rice mapping and monitoring. Can. J. Remote Sens. 2012, 38, 169–179. [Google Scholar] [CrossRef]
- He, Z.; Li, S.; Lin, S.; Dai, L. Monitoring Rice Phenology Based on Freeman-Durden Decomposition of Multi-Temporal Radarsat-2 Data. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7691–7694. [Google Scholar] [CrossRef]
- Lindenschmidt, K.-E.; Li, Z. Monitoring River ice cover development using the Freeman–Durden decomposition of quad-pol Radarsat-2 images. J. Appl. Remote Sens. 2018, 12, 026014. [Google Scholar] [CrossRef]
- Parida, B.R.; Mandal, S.P. Polarimetric decomposition methods for LULC mapping using ALOS L-band PolSAR data in Western parts of Mizoram, Northeast India. SN Appl. Sci. 2020, 2, 1049. [Google Scholar] [CrossRef]
- Wang, S.; Pei, J.; Liu, K.; Zhang, S.; Chen, B. Unsupervised classification of POLSAR data based on the polarimetric decomposition and the co-polarization ratio. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 424–427. [Google Scholar] [CrossRef]
- Gururaj, P.; Umesh, P.; Shetty, A. Assessment of surface soil moisture from ALOS PALSAR-2 in small-scale maize fields using polarimetric decomposition technique. Acta Geophys. 2021, 69, 579–588. [Google Scholar] [CrossRef]
- Merzouki, A.; McNairn, H.; Pacheco, A. Potential of mapping soil moisture by combining radar backscatter modeling and PolSAR decomposition. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4419–4422. [Google Scholar] [CrossRef]
- Yamaguchi, Y. Disaster Monitoring by Fully Polarimetric SAR Data Acquired with ALOS-PALSAR. Proc. IEEE 2012, 100, 2851–2860. [Google Scholar] [CrossRef]
- Sun, S.; Liu, R.; Wen, W. Unsupervised classification method for polarimetric synthetic aperture radar imagery based on Yamaguchi four-component decomposition model. J. Electr. Comput. Eng. 2015, 2015, 39. [Google Scholar] [CrossRef]
- Han, Y.; Shao, Y. Full polarimetric SAR classification based on Yamaguchi decomposition model and scattering parameters. In Proceedings of the 2010 IEEE International Conference on Progress in Informatics and Computing, Shanghai, China, 10–12 December 2010; pp. 1104–1108. [Google Scholar] [CrossRef]
- Singh, G.; Yamaguchi, Y.; Park, S.-E. Utilization of four-component scattering power decomposition method for glaciated terrain classification. Geocarto Int. 2011, 26, 377–389. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Yamada, H.; Yajima, Y.; Sato, R.; Boerner, W. POLSAR Image Analysis of Wetlands Using Fully Polarimetric Quad-SAR Data. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 July 2008; pp. 1–4. [Google Scholar]
- Pottier, E.; Lee, J.S. Application of the «H/A/α» Polarimetric Decomposition Theorem for Unsupervised Classification of Fully Polarimetric SAR Data Based on the Wishart Distribution. In Proceedings of the 2000 SAR Workshop: CEOS Committee on Earth Observation Satellites; Working Group on Calibration and Validation, Toulouse, France, 26–29 October 1999. [Google Scholar]
- Zhang, Y.; Zhang, J.; Zhang, X.; Wu, H.; Guo, M. Land Cover Classification from Polarimetric SAR Data Based on Image Segmentation and Decision Trees. Can. J. Remote Sens. 2015, 41, 40–50. [Google Scholar] [CrossRef]
- Trisasongko, B.H. The Use of Polarimetric SAR Data for Forest Disturbance Monitoring. Sens. Imaging 2010, 11, 1–13. [Google Scholar] [CrossRef]
- Singh, G.; Venkataraman, G.; Kumar, V.; Rao, Y.S. The H/A/Alpha Polarimetric Decomposition Theorem and Complex Wishart Distribution for Snow Cover Monitoring. In Proceedings of the 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. 1081–1084. [Google Scholar] [CrossRef]
- Varade, D.; Singh, G.; Dikshit, O.; Manickam, S. Identification of snow using fully polarimetric SAR databased on entropy and anisotropy. Water Resour. Res. 2020, 56, e2019WR025449. [Google Scholar] [CrossRef]
- Chen, Y.; He, X.; Wang, J. Classification of coastal wetlands in eastern China using polarimetric SAR data. Arab. J. Geosci. 2015, 8, 10203–10211. [Google Scholar] [CrossRef]
- Schmitt, A.; Brisco, B. Wetland Monitoring Using the Curvelet-Based Change Detection Method on Polarimetric SAR Imagery. Water 2013, 5, 1036–1051. [Google Scholar] [CrossRef]
- Adhikari, R. Evaluation of Polarimetric Eigenvector Based Decomposition for Types of Wetland Mapping, 14 June 2021, PREPRINT (Version 1). Available online: https://doi.org/10.21203/rs.3.rs-581046/v1 (accessed on 20 January 2024).
- Harfenmeister, K.; Itzerott, S.; Weltzien, C.; Spengler, D. Agricultural Monitoring Using Polarimetric Decomposition Parameters of Sentinel-1 Data. Remote Sens. 2021, 13, 575. [Google Scholar] [CrossRef]
- Jiao, X.; Kovacs, J.M.; Shang, J.; McNairn, H.; Walters, D.; Ma, B.; Geng, X. Object-oriented crop mapping and monitoring using multi-temporal polarimetric RADARSAT-2 data. ISPRS J. Photogramm. Remote Sens. 2014, 96, 38–46. [Google Scholar] [CrossRef]
- Zakeri, B.; Ghorbani, A.; Galletti, M. Pure Target Detection Based on Eigenvector Decomposition Using H-α Method in Radar Polarimetry. In Proceedings of the 2006 International RF and Microwave Conference, Putra Jaya, Malaysia, 12–14 September 2006; pp. 101–105. [Google Scholar] [CrossRef]
- Chen, J.; Chen, Y.; Yang, J. Ship Detection Using Polarization Cross-Entropy. IEEE Geosci. Remote Sens. Lett. 2009, 6, 723–727. [Google Scholar] [CrossRef]
- Rogers, G.W.; Rais, H.; Cameron, W.L. Polarimetric SAR Signature Detection Using the Cameron Decomposition. IEEE Trans. Geosci. Remote Sens. 2014, 52, 690–700. [Google Scholar] [CrossRef]
- Poelman, A. Reconsideration of the target detection criterion based on adaptive antenna polarizations. AGARD Avion. Panel Symp. 1977, 197, 1–15. [Google Scholar]
- Shupe, M.S. Land cover trends in Metro Vancouver, Canada over 45 years: Mapping, analysis, and visualization, University of the Fraser Valley, Geography, Abbotsford, Canada. In Proceedings of the 26th International Cartographic Conference, Dresden, Germany, 25–30 August 2013. [Google Scholar]
- Karachristos, K.; Anastassopoulos, V. Land Cover Classification Based on Double Scatterer Model and Neural Networks. Geomatics 2022, 2, 323–337. [Google Scholar] [CrossRef]
- Karachristos, K.; Anastassopoulos, V. Automatic Ship Detection Using PolSAR Imagery and the Double Scatterer Model. Geomatics 2023, 3, 174–187. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elementary Scatterer | Normalized Complex Vector | Complex Parameter |
|---|---|---|
| Trihedral | ||
| Dihedral | ||
| Dipole | ||
| Cylinder | ||
| Narrow Diplane | ||
| ¼ wave devise |
| Scattering Mechanisms by Cameron | Color Representation |
|---|---|
| Trihedral |  |
| Dihedral |  |
| Dipole |  |
| Cylinder |  |
| Narrow Diplane |  |
| ¼ wave device |  |
| Left helix |  |
| Right Helix |  |
| Coherent Target Decomposition | Advantages | Disadvantages | Application Fields | |
| Pauli Decomposition | Can effectively differentiate natural targets | Unable to identify artificial targets | Image coloring | |
| Dependency on the orientation angle | Not all scattering behaviors can be explained | Easily combine with machine learning algorithms | ||
| Computationally straightforward | ||||
| Cameron Coherent Target Decomposition | Optimize the utilization of data from the maximized symmetric component of coherent targets | Not all scattering behaviors can be explained | Ship detection | |
| Additional scattering mechanisms for interpreting scattering behaviors | Greater computational cost than Pauli | Easily combine with machine learning algorithms | ||
| Not appropriate for intricate situations involving asymmetric targets |
| −4 dB | −2 dB | −2 dB | 2 dB | 2 dB | 4 dB | |
| Non-Coherent Target Decomposition Model-Based Approaches | Advantages | Disadvantages | Application Fields | |
| Freeman–Durden Decomposition (Three component Model) | Based on fundamental principles of radar scattering | Unable to distinguish forest and man-made buildings | Land use–land cover Forest and crop monitoring | |
| Distinguish various surface cover types | The validity of the three components it relies upon may not always hold | |||
| Suitable for natural distributed target areas analysis | The accuracy of the results depends on the correlation coefficients, which assume reflection symmetry | |||
| Yamaguchi Decomposition (Four component Model) | Extended Three Components Decomposition | Sensitivity to noise | Natural disaster monitoring | |
| Additional scattering mechanisms | Greater computational cost | Terrain Classification | ||
| Dependence on specific assumptions which may not hold in all situations. |
| Non-Coherent Target Decomposition Eigenvector-Eigenvalue Approaches | Advantages | Disadvantages | Application Fields | |
| Cloude–Pottier Entropy-based decomposition | Detailed information about scattering mechanisms | Complex mathematical formulations | Land cover classification | |
| Physical interpretations | Dependence on Assumptions | Environmental Monitoring | ||
| Limited Sensitivity to Certain Targets | Limited Sensitivity to Certain Targets | Target Recognition |
| Scattering Mechanism | Color Representation |
|---|---|
| Trihedral |  |
| Dihedral |  |
| Dipole |  |
| Cylinder |  |
| Narrow Diplane |  |
| ¼ wave device |  |
| Left helix/Right helix |  |
| Proposed Scattering Mechanism | Color Representation |
|---|---|
| Trihedral |  |
| Dihedral |  |
| Dipole |  |
| ¼ wave device |  |
| Left helix/Right helix |  |
| Primary Scattering Mechanism | Secondary Scattering Mechanism | Color Representation |
|---|---|---|
| Trihedral | Dipole |  |
| Dipole | Trihedral |  |
| Trihedral | ¼ wave device |  |
| ¼ wave device | Trihedral |  |
| Dihedral | Dipole |  |
| Dipole | Dihedral |  |
| Dihedral | ¼ wave device |  |
| ¼ wave device | Dihedral |  |
| Asymmetric Scattering Mechanisms | ||
| Left helix |  | |
| Right helix |  | |
| Double Scatterer Model | Advantages | Disadvantages | Application Fields |
| Deep analysis of the scattering nature of each PolSAR cell | Noise sensitivity | Land cover classification | |
| Stepwise procedure | Boundless potential for evaluation due to its innovative nature | Image Segmentation | |
| Efficient and versatile feature extraction method | |||
| Versatile in its applicability | Limited Sensitivity to Certain Targets | Target Recognition |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karachristos, K.; Koukiou, G.; Anastassopoulos, V. A Review on PolSAR Decompositions for Feature Extraction. J. Imaging 2024, 10, 75. https://doi.org/10.3390/jimaging10040075
Karachristos K, Koukiou G, Anastassopoulos V. A Review on PolSAR Decompositions for Feature Extraction. Journal of Imaging. 2024; 10(4):75. https://doi.org/10.3390/jimaging10040075
Chicago/Turabian StyleKarachristos, Konstantinos, Georgia Koukiou, and Vassilis Anastassopoulos. 2024. "A Review on PolSAR Decompositions for Feature Extraction" Journal of Imaging 10, no. 4: 75. https://doi.org/10.3390/jimaging10040075
APA StyleKarachristos, K., Koukiou, G., & Anastassopoulos, V. (2024). A Review on PolSAR Decompositions for Feature Extraction. Journal of Imaging, 10(4), 75. https://doi.org/10.3390/jimaging10040075