Fusion of External and Internal Prior Information for the Removal of Gaussian Noise in Images


Abstract
:1. Introduction
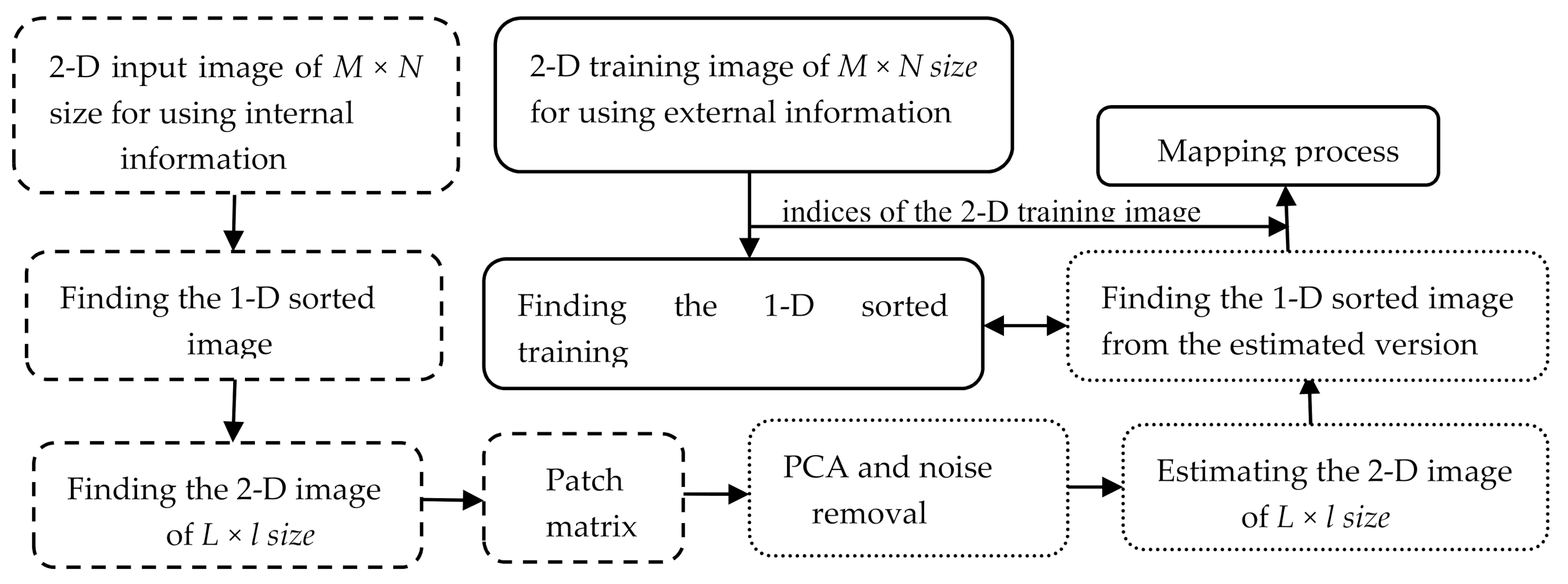
2. Algorithm Description
2.1. Input Image for Using Internal Information
2.2. Finding the 1-D Sorted Image
2.3. Finding the 2-D Image of Lxl Size and Patch Matrix
2.4. PCA and Noise Removal
2.5. Finding the Estimated Lxl Size Image and Its 1-D Sorted Image
2.6. Finding the Indices of the 2-D Training Image as an External Information
2.7. Mapping Process
2.8. Algorithm Termination
3. Simulation Results
4. Conclusions
Funding
Conflicts of Interest
References
- Xie, J.; Xu, L.; Chen, E. Image denoising and inpainting with deep neural networks. In Advances in Neural Information Processing Systems 25; Curran Associates Inc.: New York, NY, USA, 2012; pp. 341–349. [Google Scholar]
- Jain, A.; Bhateja, V. A versatile denoising method for images contaminated with Gaussian noise. In Proceedings of the CUBE International Information Technology Conference, Pune, India, 3–5 September 2012; Association for Computing Machinery (ACM): New York, NY, USA, 2012; pp. 65–68. [Google Scholar]
- Buades, A.; Coll, B.; Morel, J.M. A Review of Image Denoising Algorithms, with a New One. Multiscale Model. Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]
- Deledalle, C.-A.; Salmon, J.; Dalalyan, A. Image Denoising with Patch Based PCA: Local Versus Global. In Proceedings of the British Machine Vision Conference, Dundee, Scotland, UK, 29 August–2 September 2011; British Machine Vision Association and Society for Pattern Recognition: Dundee, Scotland, UK, 2011; pp. 1–25. [Google Scholar]
- Zhang, K.; Dong, W.; Zhang, L.; Shi, G. Two-stage image denoising by principal component analysis with local pixel grouping. Pattern Recognit. 2010, 43, 1531–1549. [Google Scholar] [CrossRef] [Green Version]
- Gu, S.; Xie, Q.; Meng, D.; Zuo, W.; Feng, X.; Zhang, K. Weighted Nuclear Norm Minimization and Its Applications to Low Level Vision. Int. J. Comput. Vis. 2016, 121, 183–208. [Google Scholar] [CrossRef]
- Zoran, D.; Weiss, Y. From learning models of natural image patches to whole image restoration. In Proceedings of the International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 479–486. [Google Scholar]
- Elad, M.; Aharon, M. Image denoising via sparse and redundant representations over learned dictionaries. IEEE Trans. Image Process. 2006, 15, 3736–3745. [Google Scholar] [CrossRef] [PubMed]
- Mairal, J.; Bach, F.; Ponce, J.; Sapiro, G.; Zisserman, A. Non-local sparse models for image restoration. In Proceedings of the IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 2272–2279. [Google Scholar]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, K. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mosseri, I.; Zontak, M.; Irani, M. Combining the power of Internal and External denoising. In Proceedings of the IEEE International Conference on Computational Photography (ICCP), Cambridge, MA, USA, 19–21 April 2013; pp. 1–9. [Google Scholar]
- Burger, H.C.; Schüler, C.; Harmeling, S. Learning How to Combine Internal and External Denoising Methods. Comput. Vis. 2013, 8142, 121–130. [Google Scholar] [CrossRef]
- Chan, S.H.; Luo, E.; Nguyen, T.Q. Adaptive patch-based image denoising by EM-adaptation. In Proceedings of the 2015 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Orlando, FL, USA, 14–16 December 2015; pp. 810–814. [Google Scholar]
- Parameswaran, S.; Luo, E.; Nguyen, T.Q. Patch Matching for Image Denoising Using Neighborhood-Based Collaborative Filtering. IEEE Trans. Circuits Syst. Video Technol. 2016, 28, 392–401. [Google Scholar] [CrossRef]
- Donoho, D. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L.; Johnstone, I.M. Adapting to unknown smoothness via wavelet shrinkage. J. Am. Stat. Assoc. 1995, 90, 1200–1224. [Google Scholar] [CrossRef]
- Portilla, J.; Strela, V.; Wainwright, M.J.; Simoncelli, E.P. Image denoising using scale mixtures of gaussians in the wavelet domain. IEEE Trans. Image Process. 2003, 12, 1338–1351. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rajaei, B. An Analysis and Improvement of the BLS-GSM Denoising Method. Image Process. Line 2014, 4, 44–70. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, U.; Roth, S. Shrinkage fields for effective image restoration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2014, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Chen, Y.; Yu, W.; Pock, T. On learning optimized reaction diffusion processes for effective image restoration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5261–5269. [Google Scholar]
- Wang, S.; Zhang, K.; Liang, Y. Nonlocal Spectral Prior Model for Low-Level Vision. In Proceedings of the Computer Vision, Daejeon, Korea, 5–9 November 2012; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2013; pp. 231–244. [Google Scholar]
- Ji, H.; Liu, C.; Shen, Z.; Xu, Y. Robust video denoising using low rank matrix completion. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1791–1798. [Google Scholar]
- Oh, T.-H.; Kim, H.; Tai, Y.-W.; Bazin, J.-C.; Kweon, I.S. Partial Sum Minimization of Singular Values in RPCA for Low-Level Vision. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 145–152. [Google Scholar]
- Isogawa, K.; Ida, T.; Shiodera, T.; Takeguchi, T. Deep Shrinkage Convolutional Neural Network for Adaptive Noise Reduction. IEEE Signal. Process. Lett. 2017, 25, 224–228. [Google Scholar] [CrossRef]
- Wang, X.; Tao, Q.; Wang, L.; Li, D.; Zhang, M.; Xuejiao, W.; Qiuyan, T.; Lianghao, W.; Dongxiao, L.; Ming, Z. Deep convolutional architecture for natural image denoising. In Proceedings of the International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–4. [Google Scholar]
- Min, C.; Wen, G.; Li, B.; Fan, F. Blind Deblurring via a Novel Recursive Deep CNN Improved by Wavelet Transform. IEEE Access 2018, 6, 69242–69252. [Google Scholar] [CrossRef]
- Xiu, C.; Su, X. Composite Convolutional Neural Network for Noise Deduction. IEEE Access 2019, 7, 117814–117828. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| σ = 20 | 512 × 512 | 1024 × 256 | 2048 × 128 | 4096 × 64 | 8192 × 32 | 16,384 × 16 |
|---|---|---|---|---|---|---|
| Lena | 33.36 | 33.92 | 35.12 | 36.86 | 37.2 | 28.26 |
| Pepper | 33.7 | 34.07 | 34.35 | 36.75 | 35.62 | 30.88 |
| Bridge | 36.05 | 36.38 | 36.80 | 37.20 | 34.44 | 28.32 |
| σ = 20 | 7 × 7 | 9 × 9 | 11 × 11 | 13 × 13 | 15 × 15 | 17 × 17 |
|---|---|---|---|---|---|---|
| Lena(original) | 35.44 | 35.4 | 37.2 | 36.54 | 36.12 | 34.00 |
| Lena(BM3D,5) | 34.07 | 34.05 | 35.31 | 34.92 | 34.62 | 32.98 |
| Pepper(original) | 36.21 | 36.63 | 35.62 | 33.42 | 33.46 | 33.72 |
| Bridge(original) | 35.02 | 34.51 | 34.44 | 33.34 | 33.25 | 32.54 |
| Lake(original) | 33.87 | 37.19 | 35.41 | 31.64 | 31.34 | 32.02 |
| σ = 30 | Th = 0.1 | Th = 0.2 | Th = 0.3 | Th = 0.4 | Th = 0.5 | Th = 0.6 |
|---|---|---|---|---|---|---|
| Lena | 31.52/28.3 | 31.24/29.1 | 31.17/29.4 | 30.63/32 | 30.46/33.3 | 30.79/31 |
| Pepper | 31.43/28.6 | 31.25/29.2 | 31.15/29.6 | 30.75/31.4 | 30.41/34 | 30.82/31 |
| Bridge | 31.06/29.94 | 31.02/30.14 | 30.79/31.18 | 30.5/33.17 | 30.7/31.76 | 31.35/28.88 |
| Baboon | 31.57/28.3 | 31.4/28.8 | 31.17/29.5 | 30.550/32.9 | 30.554/32.76 | 30.80/31.12 |
| Lake | 32.55/26.1 | 32.27/26.6 | 32.15/26.9 | 32/27.2 | 30.53/33 | 30.50/33.2 |
| σ = 20 | New(original) | New, BM3D(5) | BM3D | PGPCA | EPLL |
| Lena | 20.20 | 20.49 | 8.43 | 16.76 | 821.04 |
| Pepper | 20.96 | 20.42 | 8.96 | 17.51 | 870.67 |
| σ = 20 | Original, New | PGPCA(5), New | BM3D | PGPCA | EPLL |
|---|---|---|---|---|---|
| Lena(0.5) | 37.2 | 35.24 | 33.29 | 32.45 | 32.9 |
| Pepper(0.4) | 35.62 | 34.06 | 33.64 | 32.59 | 33.29 |
| Lake(0.6) | 35.41 | 32.92 | 30.33 | 30 | 30.39 |
| Boat(0.3) | 33.08 | 31.79 | 31.12 | 30.39 | 30.96 |
| Baboon(0.4) | 37.68 | 33.57 | 26.57 | 26.23 | 26.73 |
| Fruits(0.3) | 36.80 | 34.64 | 32.76 | 31.70 | 32.67 |
| Cat(0.3) | 36.93 | 34.22 | 29.85 | 29.55 | 29.65 |
| σ = 30 | Original, New | BM3D(5), New | BM3D(10), New | BM3D | PGPCA |
|---|---|---|---|---|---|
| Lena(0.5) | 33.3 | 32.36 | 31.44 | 31.5 | 31.29 |
| Pepper(0.5) | 34 | 32.91 | 31.99 | 31.94 | 31.46 |
| Bridge(0.4) | 33.17 | 31.34 | 29.01 | 25.43 | 25.92 |
| Baboon(0.4) | 32.9 | 30.96 | 28.48 | 24.52 | 25 |
| Lake(0.6) | 33.2 | 31.36 | 29.71 | 28.53 | 28.87 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Awad, A.S. Fusion of External and Internal Prior Information for the Removal of Gaussian Noise in Images. J. Imaging 2020, 6, 103. https://doi.org/10.3390/jimaging6100103
Awad AS. Fusion of External and Internal Prior Information for the Removal of Gaussian Noise in Images. Journal of Imaging. 2020; 6(10):103. https://doi.org/10.3390/jimaging6100103
Chicago/Turabian StyleAwad, Ali S. 2020. "Fusion of External and Internal Prior Information for the Removal of Gaussian Noise in Images" Journal of Imaging 6, no. 10: 103. https://doi.org/10.3390/jimaging6100103
APA StyleAwad, A. S. (2020). Fusion of External and Internal Prior Information for the Removal of Gaussian Noise in Images. Journal of Imaging, 6(10), 103. https://doi.org/10.3390/jimaging6100103