Analysing Arbitrary Curves from the Line Hough Transform



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction to the Hough Transform
1.1. Limitations of Hough Transform
1.2. Contributions
2. Prior Work on Extracting More Information from the Line Hough Transform
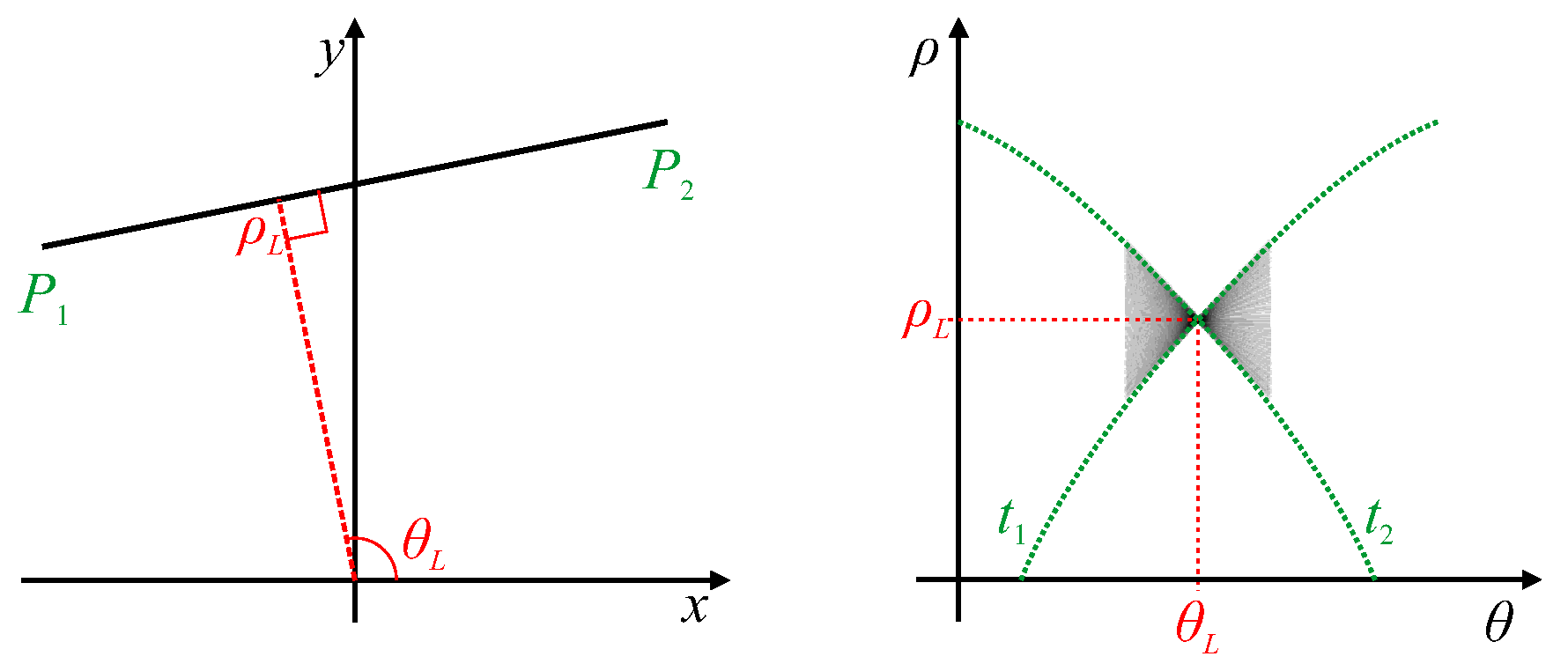
3. Analysis of Hough Line Transform Mapping
Extension to Other Parameterisations
4. Mapping of Patterns
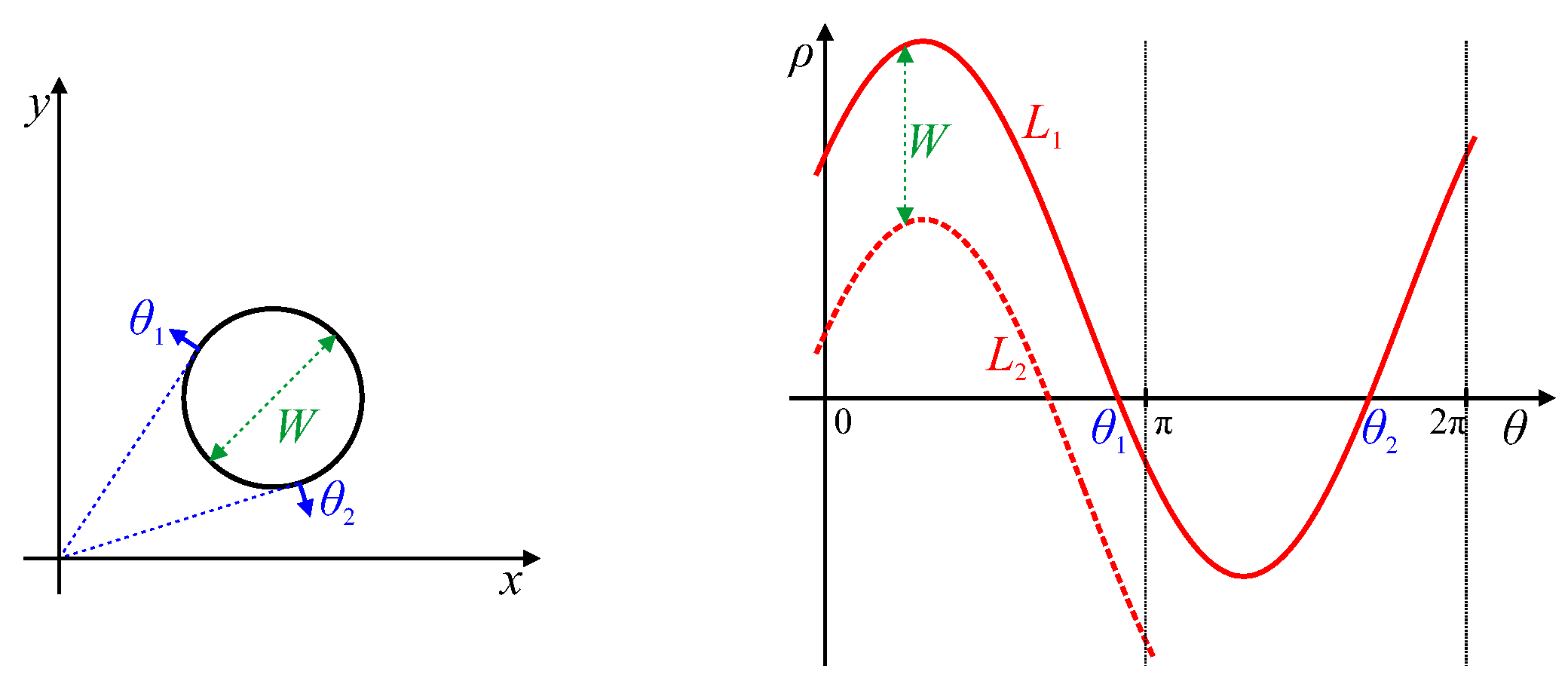
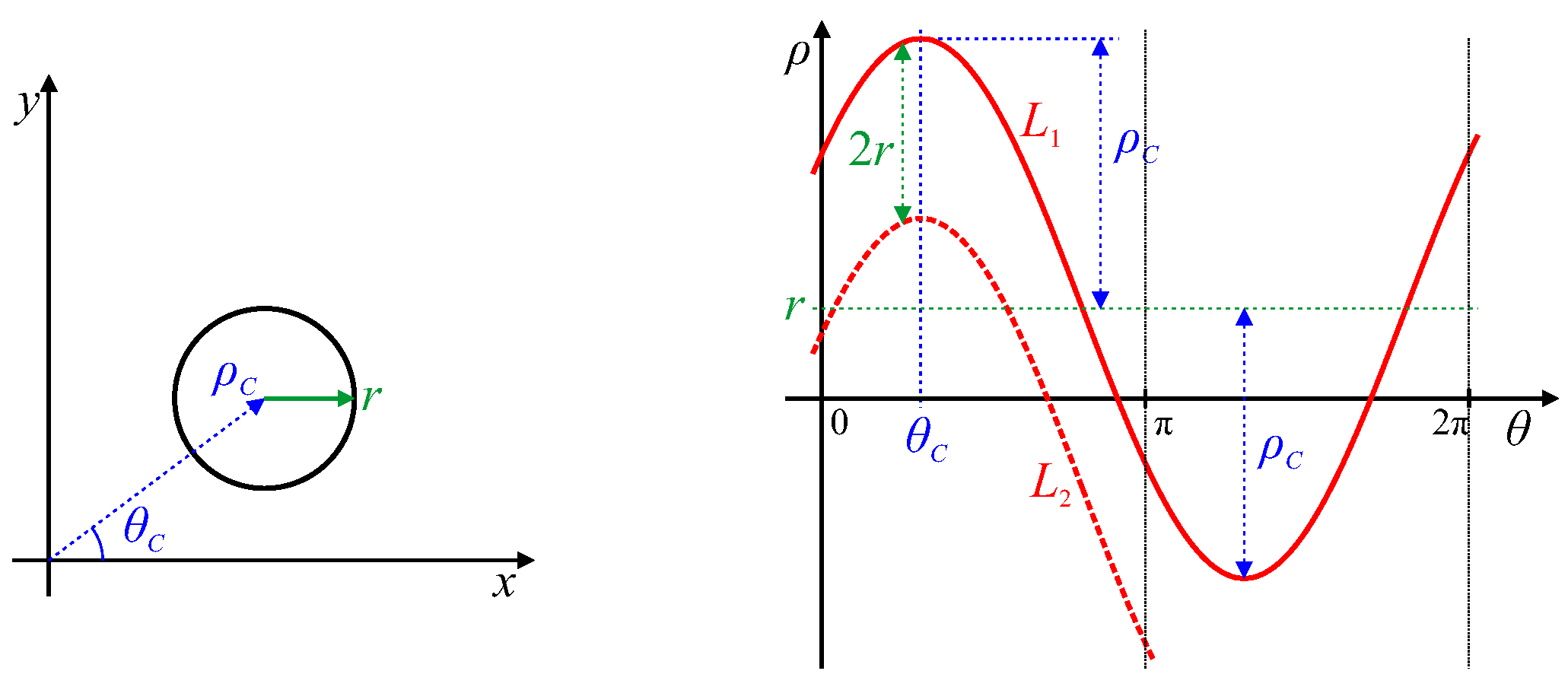
4.1. Closed Curves
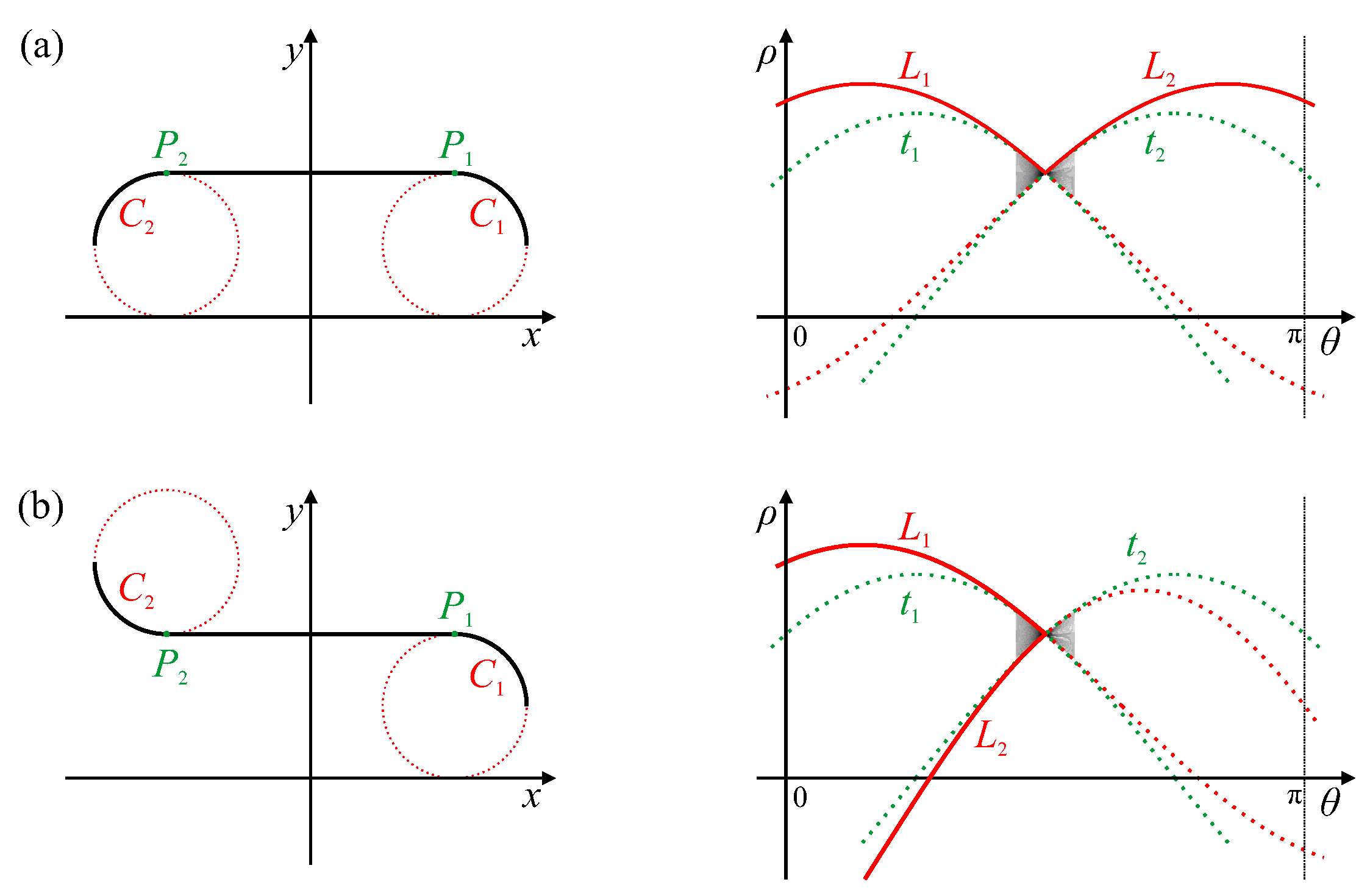
4.2. Linear Segments
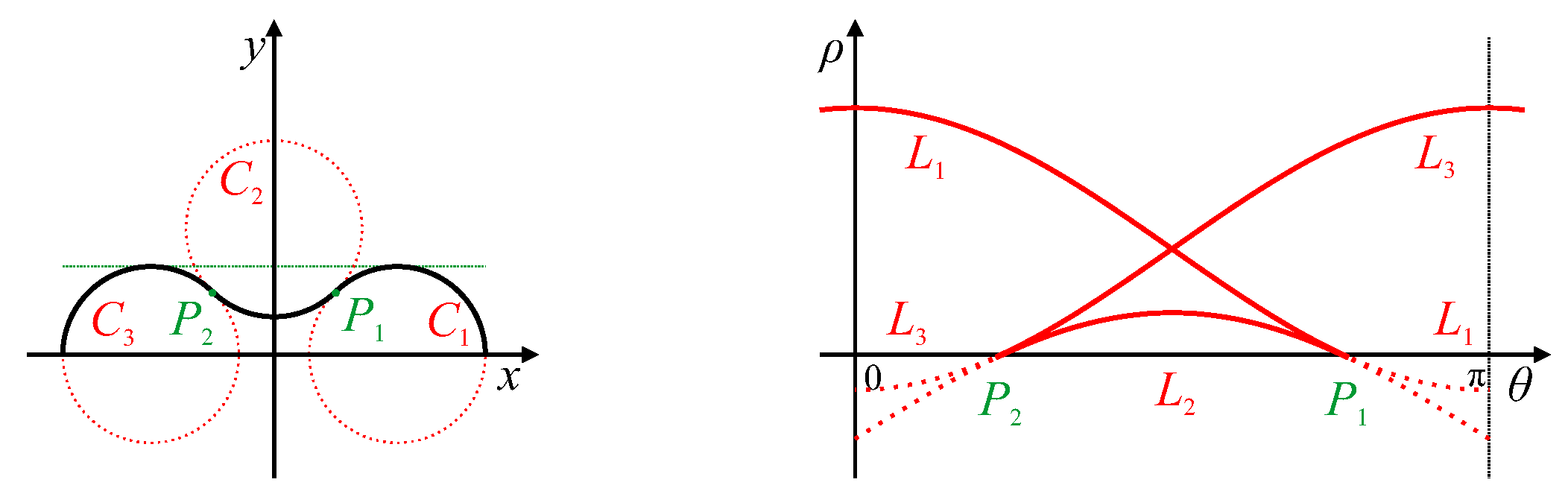
4.3. Inflection Points
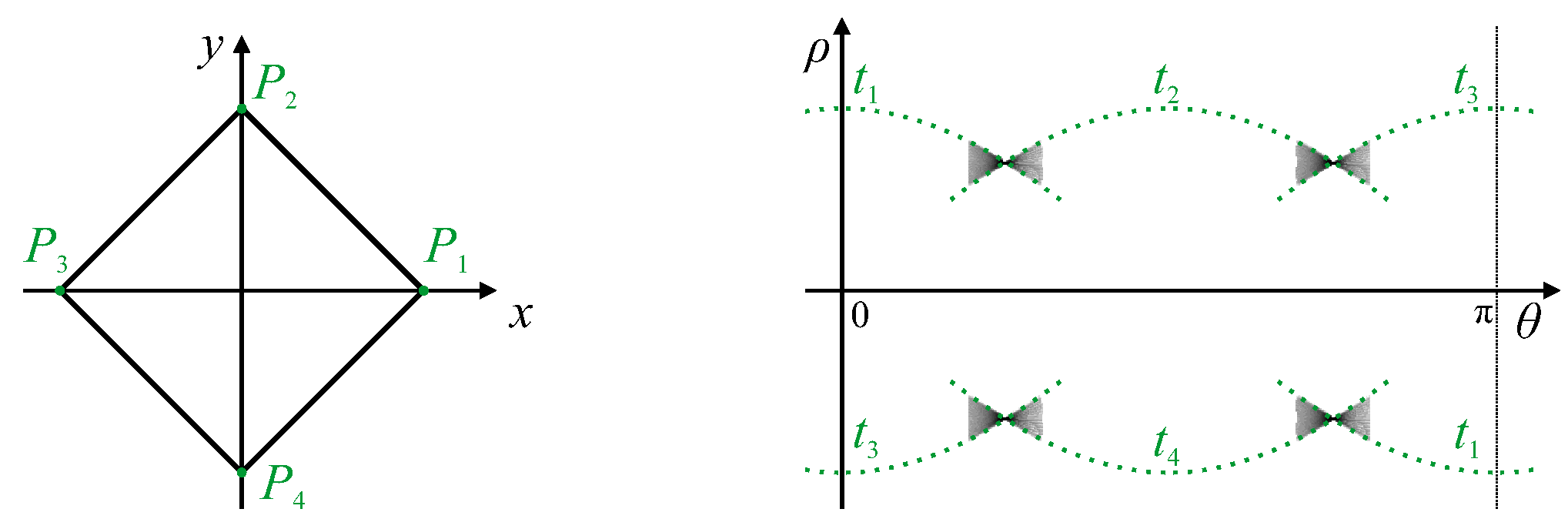
4.4. Corners
4.5. Convex Hull
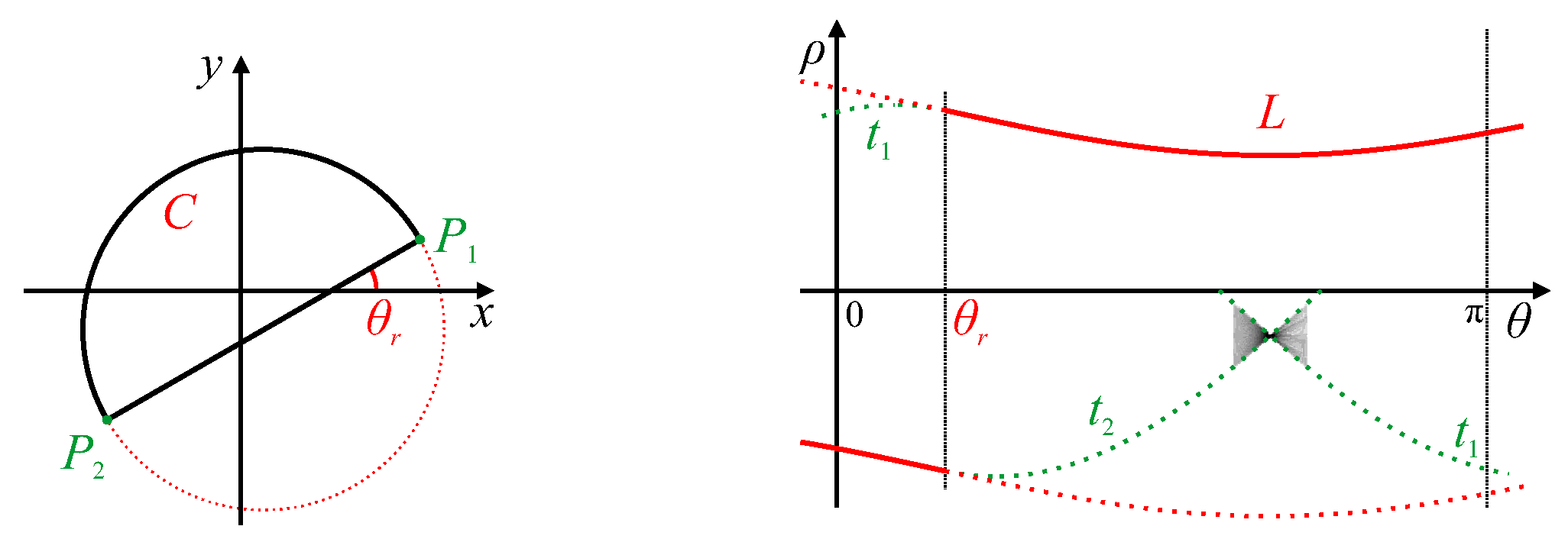
4.6. Parabolas
5. Testing on a Real Image
5.1. Hough Transform
| Algorithm 1 Full Hough transform. |
| Input: Binary image after Canny filtering (origin in centre of image) |
| Output: Vote image |
|
| Algorithm 2 Gradient Hough transform. |
| Input: Binary image after Canny filtering (origin in centre of image) |
| Input: Orientation image of detected pixels from the Canny filter |
| Output: Vote image |
5.2. Locus Analysis
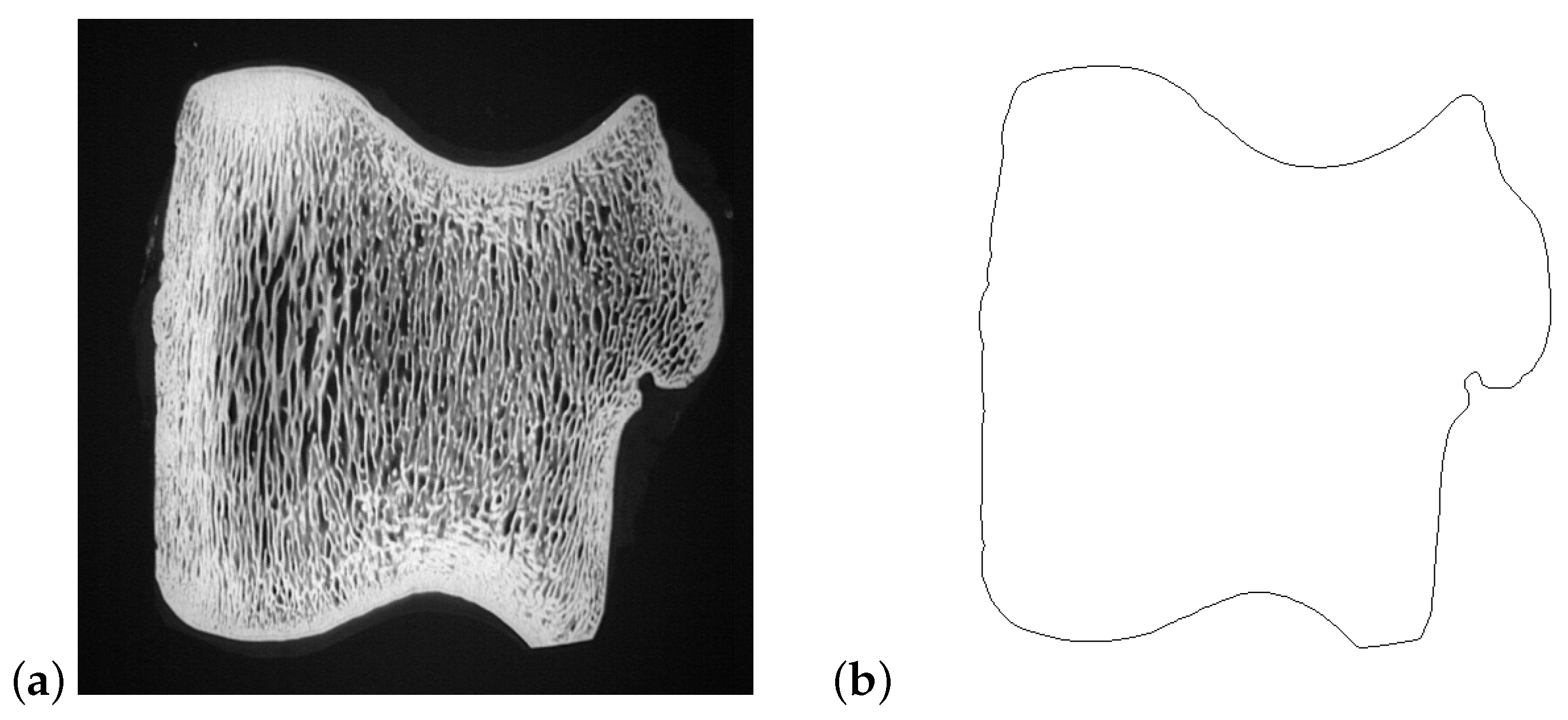
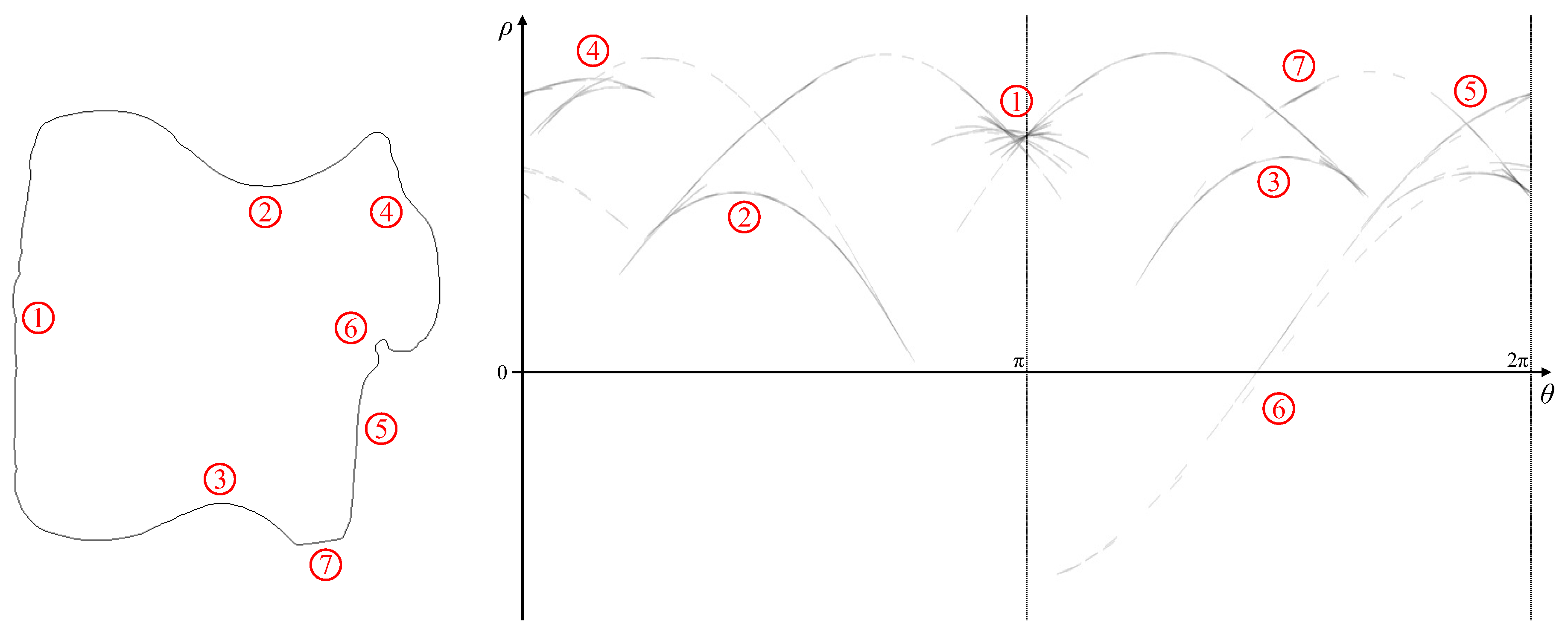
- Even minor noise on the boundary can result in inflections. In some cases, this leads to a broadening of the peak locus, reflecting the uncertainty in the actual edge position. In other cases, there is a series of distinct cusps. These are most noticeable in this example around ➀ corresponding to the ripples in the left edge of the image, where at least 14 distinct cusps may be found.
- Cusps come in pairs, one pointing to the left and one pointing to the right. This can most easily be seen for the large concavities on the top ➁ and bottom ➂ of the object. Within a series of cusps (for example, ➀), the locus corresponding to following around the object boundary will have alternating left and right cusps. For generally increasing , the left cusps are in sequence from top to bottom, and the right cusps from bottom to top.
- The number of minor cusps may be reduced by increasing the smoothing of the Gaussian filter as part of the Canny edge detector (by increasing ).
- Alternatively, the weaker cusps in the pattern may simply be ignored. The weaker cusps have less support (fewer pixels have voted for these parameters), thus ignoring those pixels will remove the concavities. In general, ignoring any features within parameter space will simplify the curve.
- In particular, the locus following the maximum value of for each corresponds to the convex hull of the shape. (Note that, for a dark object on a light background, the minimum value of should be used.) The concavities on the top right and bottom right edges are represented by features ➃ and ➄, respectively.
- Where the curvature changes rapidly (for example, at sharp corners or in the circular concavity on the right side of the shape ➅), the locus is incomplete and appears as dashed lines. Each dash represents the votes from one pixel, with the length of the dash along the axis being .
- The thickening of the line at ➆ is actually a small butterfly corresponding to the short line segment within the image. However, the segment is short (especially since the ends are rounded slightly with Gaussian smoothing) and there is insufficient resolution on the axis to clearly see the butterfly shape.
| Algorithm 3 Shape of underlying peak locus. |
| Input: 1D array, B, containing the sequence of detected boundary pixels |
| Input: Orientation image of detected pixels from the Canny filter |
| Output: Vote image |
|
5.3. Curve Reconstruction
| Algorithm 4 Simple reconstruction. |
| Input: Vote image from gradient Hough transform |
| Output: Reconstructed image |
|
5.4. Filtered Reconstruction
| Algorithm 5 Improved reconstruction through linking points and filtering. |
| Input: Vote image from gradient Hough transform |
| Output: Reconstructed image |
|
5.5. Inflection Points
5.6. Convex Hull
| Algorithm 6 Reconstruction of convex hull. |
| Input: Vote image from gradient Hough transform |
| Output: Reconstructed image |
|
5.7. Additional Examples
6. Summary and Conclusions
- linear segments along the boundary (including dashed lines);
- inflection points (where the curvature changes sign);
- corners;
- orientation and ellipticity of elliptical shapes;
- the convex hull of the shape; and
- the depth of concavities.
Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Hough, P.V. Method and Means for Recognizing Complex Patterns. U.S. Patent 3069654, 18 December 1962. [Google Scholar]
- Stephens, R.S. Probabilistic approach to the Hough transform. Image Vis. Comput. 1991, 9, 66–71. [Google Scholar] [CrossRef]
- Davies, E. Modelling peak shapes obtained by Hough transform. IEEE Proc. Comput. Digit. Tech. 1992, 139, 9–12. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]
- Hart, P.E. How the Hough transform was invented. IEEE Signal Process. Mag. 2009, 26, 18–22. [Google Scholar] [CrossRef]
- Kimme, C.; Ballard, D.; Sklansky, J. Finding circles by an array of accumulators. Commun. ACM 1975, 18, 120–122. [Google Scholar] [CrossRef]
- Ballard, D. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. The adaptive Hough transform. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 690–698. [Google Scholar] [CrossRef] [PubMed]
- Leavers, V.F. Use of the Radon transform as a method of extracting symbolic representations of shape in two dimensions. In Proceedings of the Fourth Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 273–280. [Google Scholar] [CrossRef]
- Kiryati, N.; Eldar, Y.; Bruckstein, A.M. A probabilistic Hough transform. Pattern Recognit. 1991, 24, 303–316. [Google Scholar] [CrossRef]
- O’Gorman, F.; Clowes, M. Finding picture edges through collinearity of feature points. IEEE Trans. Comput. 1976, 25, 449–456. [Google Scholar] [CrossRef]
- Illingworth, J.; Kittler, J. A survey of the Hough transform. Comput. Vis. Graph. Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Davies, E. A modified Hough scheme for general circle location. Pattern Recognit. Lett. 1988, 7, 37–43. [Google Scholar] [CrossRef]
- Hollitt, C. Reduction of computational complexity of Hough transforms using a convolution approach. In Proceedings of the 24th International Conference Image and Vision Computing New Zealand (IVCNZ’09), Wellington, New Zealand, 23–25 November 2009; pp. 373–378. [Google Scholar] [CrossRef]
- Dubska, M.; Herout, A.; Havel, J. PClines—Line detection using parallel coordinates. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 1489–1494. [Google Scholar] [CrossRef]
- Herout, A.; Dubska, M.; Havel, J. Real-Time Detection of Lines and Grids; Springer: London, UK, 2013; 82p. [Google Scholar] [CrossRef]
- Dubska, M.; Herout, A.; Havel, J. Real-time precise detection of regular grids and matrix codes. J. Real Time Image Process. 2016, 11, 193–200. [Google Scholar] [CrossRef]
- Gerig, G. Linking image-space and accumulator-space: A new approach for object-recognition. In Proceedings of the 1st International Conference on Computer Vision, London, UK, 8–11 June 1987; pp. 112–117. [Google Scholar]
- Leavers, V.F.; Boyce, J.F. The Radon transform and its application to shape parametrization in machine vision. Image Vis. Comput. 1987, 5, 161–166. [Google Scholar] [CrossRef]
- Furukawa, Y.; Shinagawa, Y. Accurate and robust line segment extraction by analyzing distribution around peaks in Hough space. Comput. Vis. Image Underst. 2003, 92, 1–25. [Google Scholar] [CrossRef]
- Du, S.; Tu, C.; van Wyk, B.J.; Ochola, E.O.; Chen, Z. Measuring straight line segments using HT butterflies. PLoS ONE 2012, 7, e33790. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Shin, B.S.; Klette, R. Closed form line-segment extraction using the Hough transform. Pattern Recognit. 2015, 48, 4012–4023. [Google Scholar] [CrossRef]
- Chang, Y.; Bailey, D.; Le Moan, S. Lens distortion correction by analysing peak shape in Hough transform space. In Proceedings of the Image and Vision Computing New Zealand, Christchurch, New Zealand, 4–6 December 2017; 6p. [Google Scholar] [CrossRef]
- Bailey, D.G.; Chang, Y.; Le Moan, S. Lens distortion self-calibration using the Hough transform. In Proceedings of the International Conference on Field Programmable Technology, Okinawa, Japan, 12–14 December 2018; pp. 388–391. [Google Scholar] [CrossRef]
- Chang, Y. Lens Distortion Correction by Analysing the Shape of Patterns in Hough Transform Space. Master’s Thesis, Massey University, Palmerston North, New Zealand, 2018; 66p. [Google Scholar]
- Leavers, V.F.; Miller, G.F. Radon transformation of δ-function curves. A geometric approach. In Proceedings of the Third Alvey Vision Conference, Cambridge, UK, 15–17 September 1987; pp. 335–340. [Google Scholar] [CrossRef]
- Chang, Y.; Bailey, D.; Le Moan, S. The shape of patterns tells more: Using two dimensional Hough transform to detect circles. In Proceedings of the 5th Asian Conference on Pattern Recognition (ACPR 2019), Auckland, New Zealand, 26–29 November 2019; Volume 12047, pp. 64–75. [Google Scholar] [CrossRef]
- Zou, C.; Shi, G. A fast approach to detect a kind of sinusoidal curves using Hough transform. Comput. Eng. Appl. 2002, 4, 1–3. [Google Scholar]
- Leavers, V.F. Shape Detection in Computer Vision Using the Hough Transform; Springer: London, UK, 1992; 206p. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, S.; Qian, C.; Klette, R. Accurate ellipse extraction in low-quality images. In Proceedings of the 2019 16th International Conference on Machine Vision Applications (MVA), Tokyo, Japan, 27–31 May 2019; 5p. [Google Scholar] [CrossRef]
- Davies, E.R. Circularity—A new principle underlying the design of accurate edge orientation operators. Image Vis. Comput. 1984, 2, 134–142. [Google Scholar] [CrossRef]


























© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bailey, D.; Chang, Y.; Le Moan, S. Analysing Arbitrary Curves from the Line Hough Transform. J. Imaging 2020, 6, 26. https://doi.org/10.3390/jimaging6040026
Bailey D, Chang Y, Le Moan S. Analysing Arbitrary Curves from the Line Hough Transform. Journal of Imaging. 2020; 6(4):26. https://doi.org/10.3390/jimaging6040026
Chicago/Turabian StyleBailey, Donald, Yuan Chang, and Steven Le Moan. 2020. "Analysing Arbitrary Curves from the Line Hough Transform" Journal of Imaging 6, no. 4: 26. https://doi.org/10.3390/jimaging6040026
APA StyleBailey, D., Chang, Y., & Le Moan, S. (2020). Analysing Arbitrary Curves from the Line Hough Transform. Journal of Imaging, 6(4), 26. https://doi.org/10.3390/jimaging6040026