
Smoothed Shock Filtering: Algorithm and Applications


Abstract
:1. Introduction
2. Smoothed Shock Filtering: Principle, Algorithm and Impact of Parameters
2.1. Algorithm Description
| Algorithm 1: Smoothed shock filtering |
 |
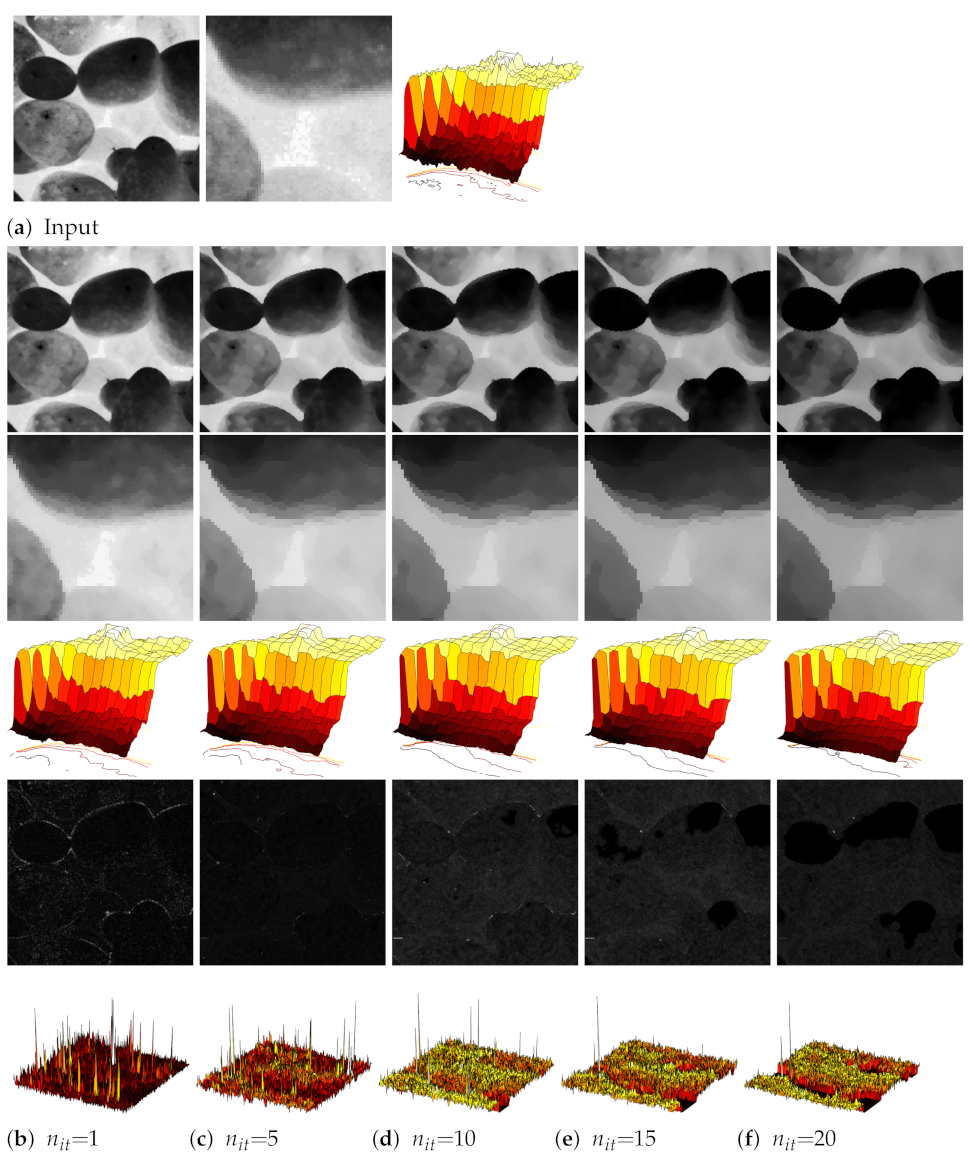
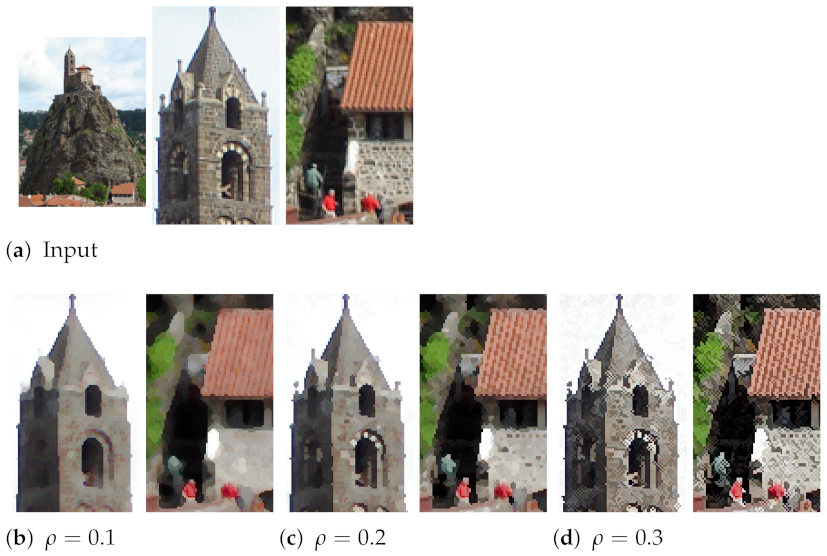
2.2. Impact of the Parameters
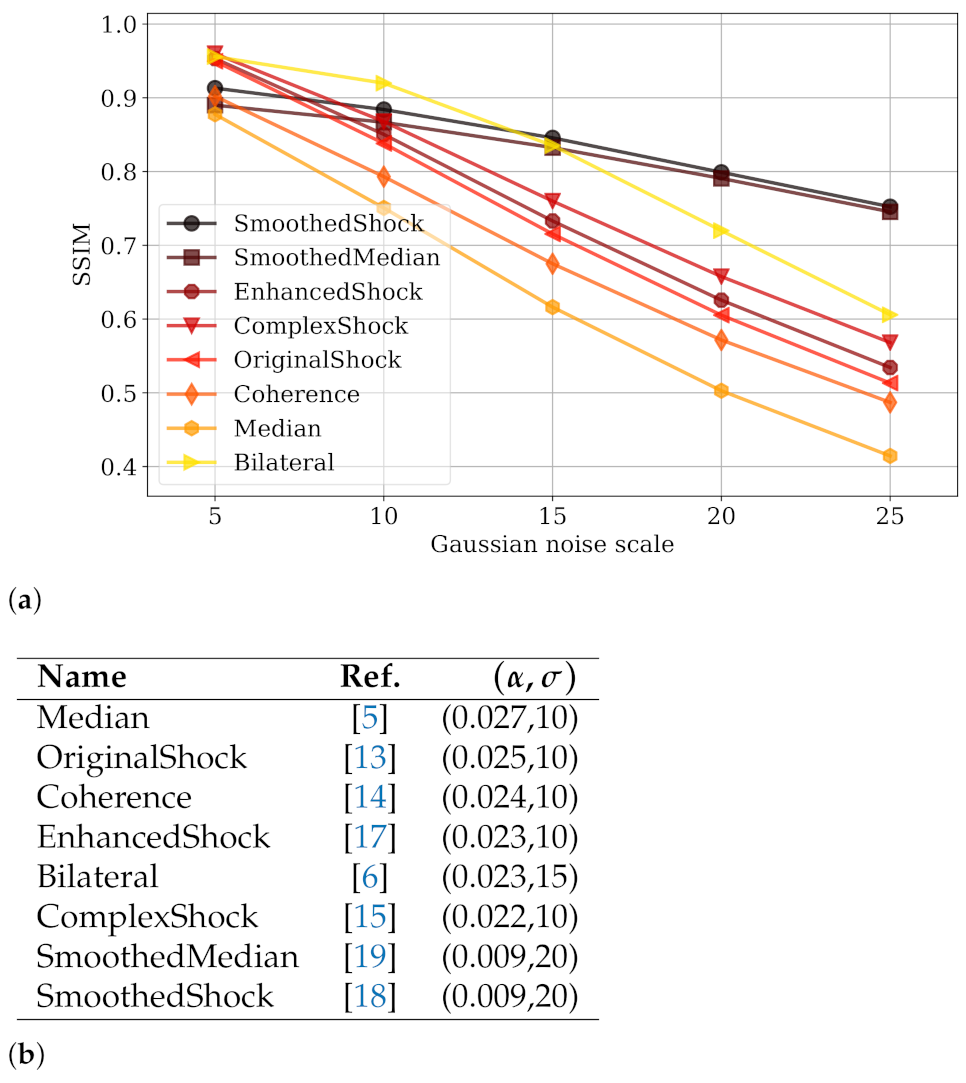
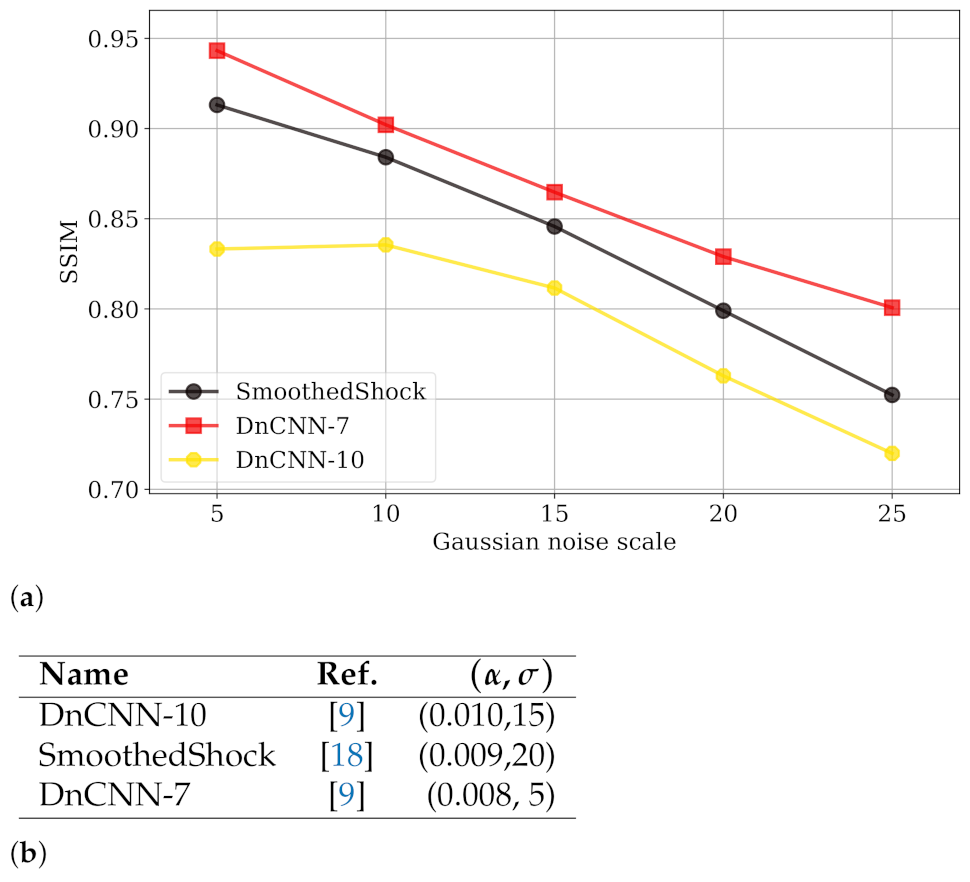
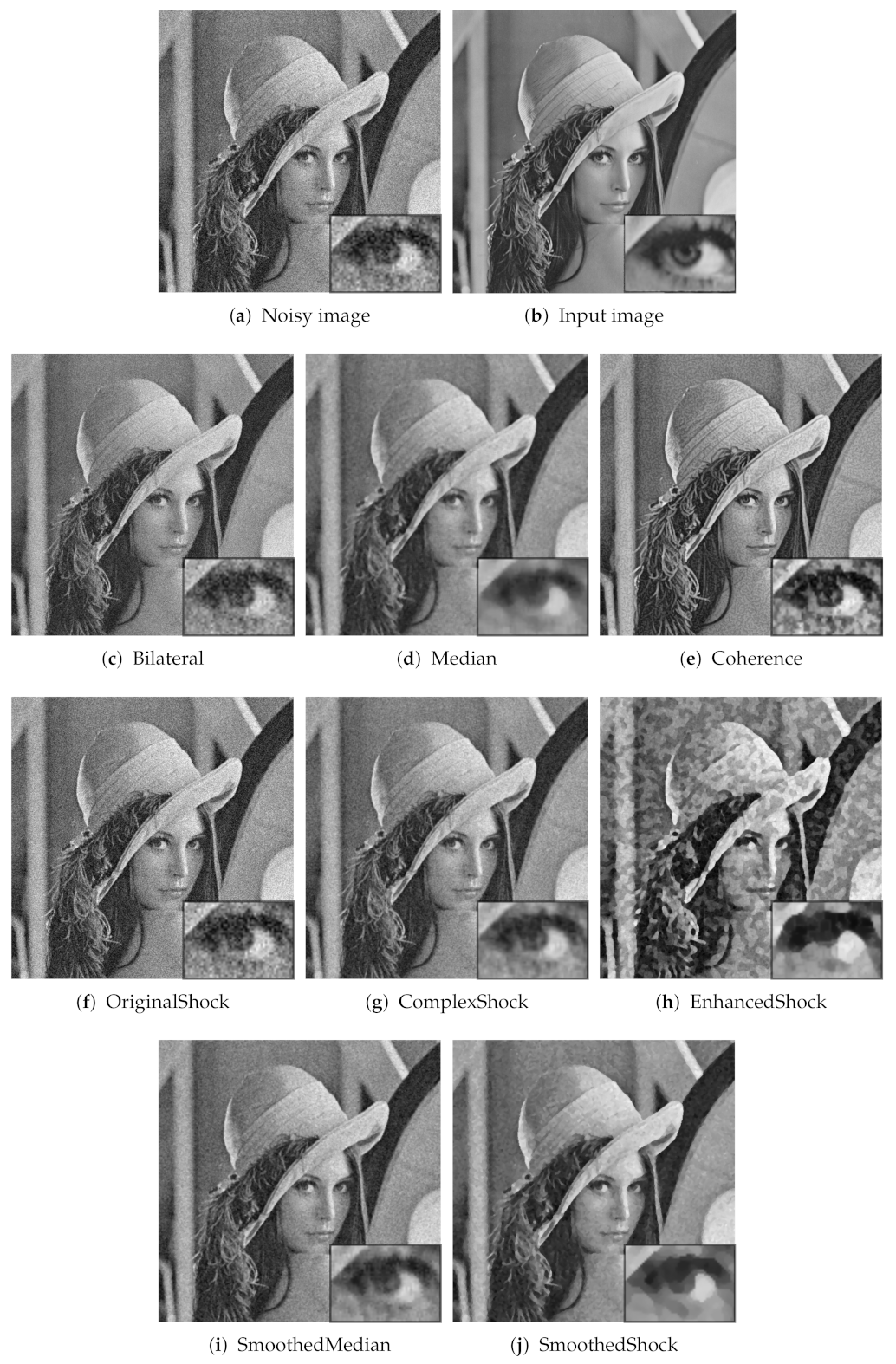
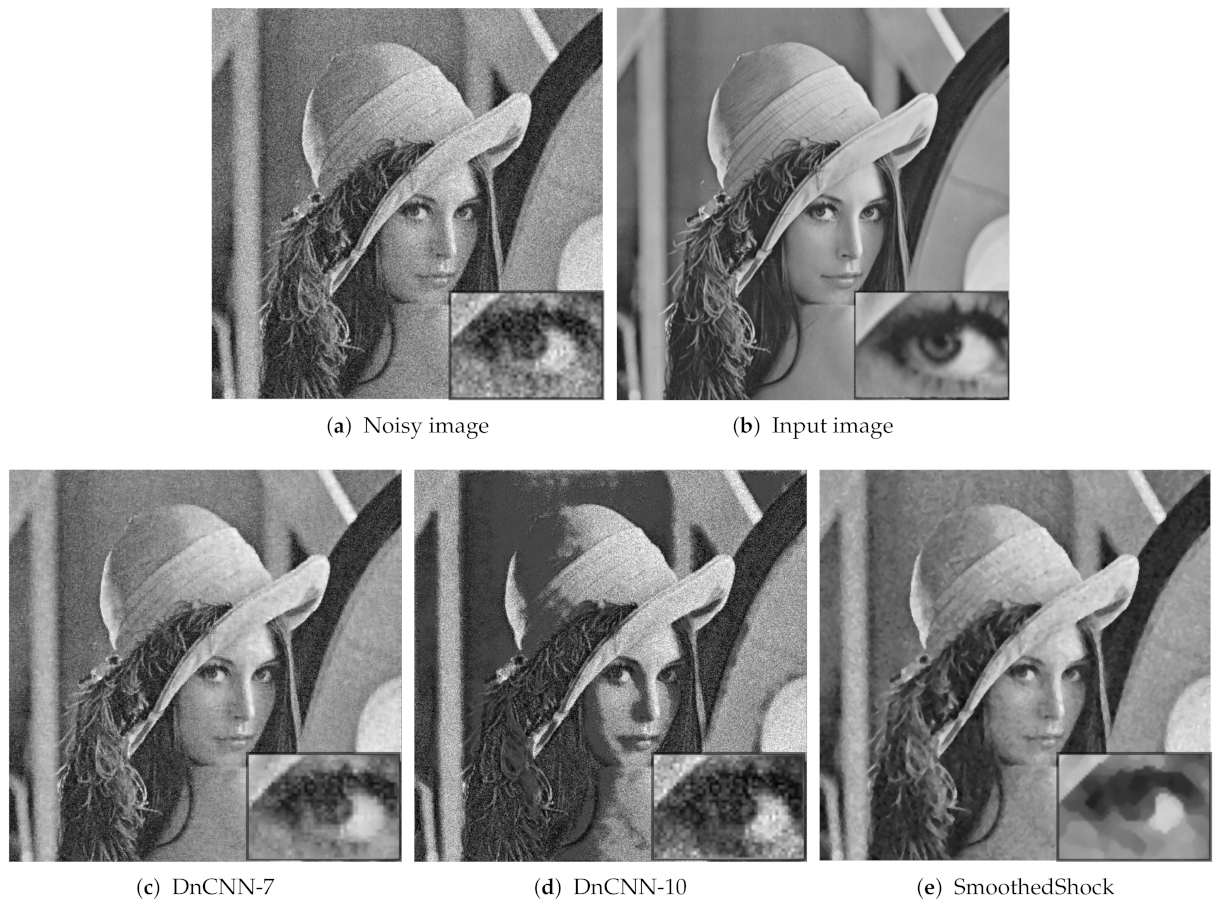
3. A Robust Approach for Image Denoising
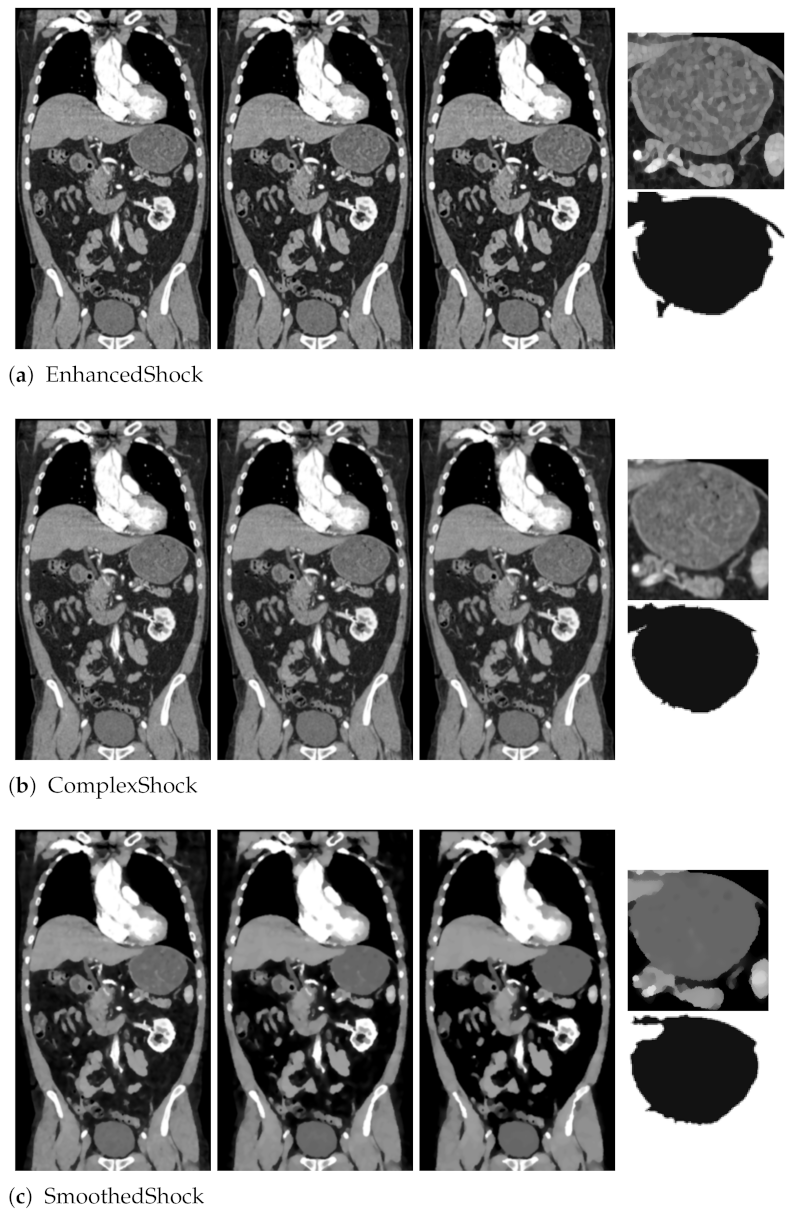
4. Image Enhancement for Improving Classification and Segmentation
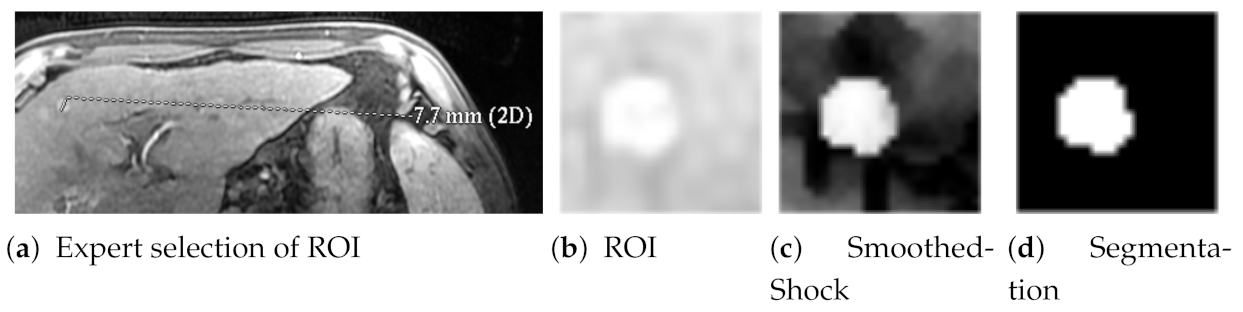
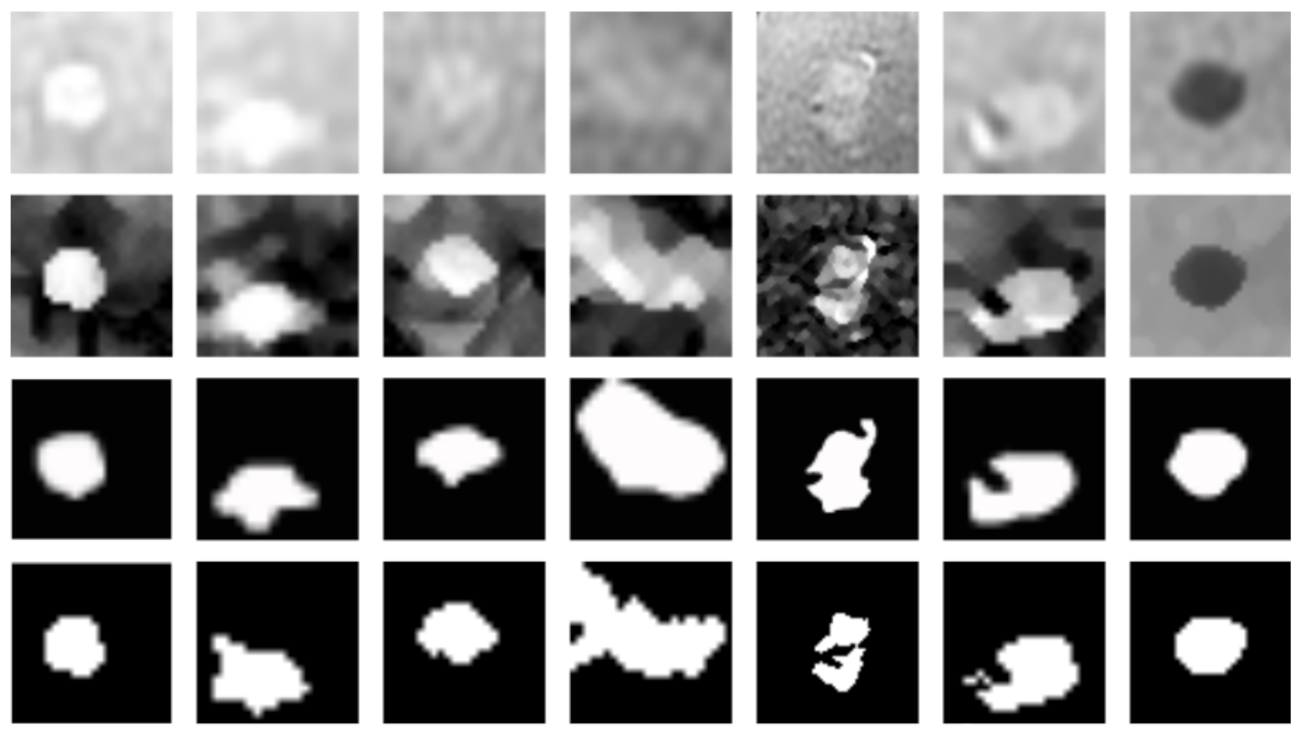
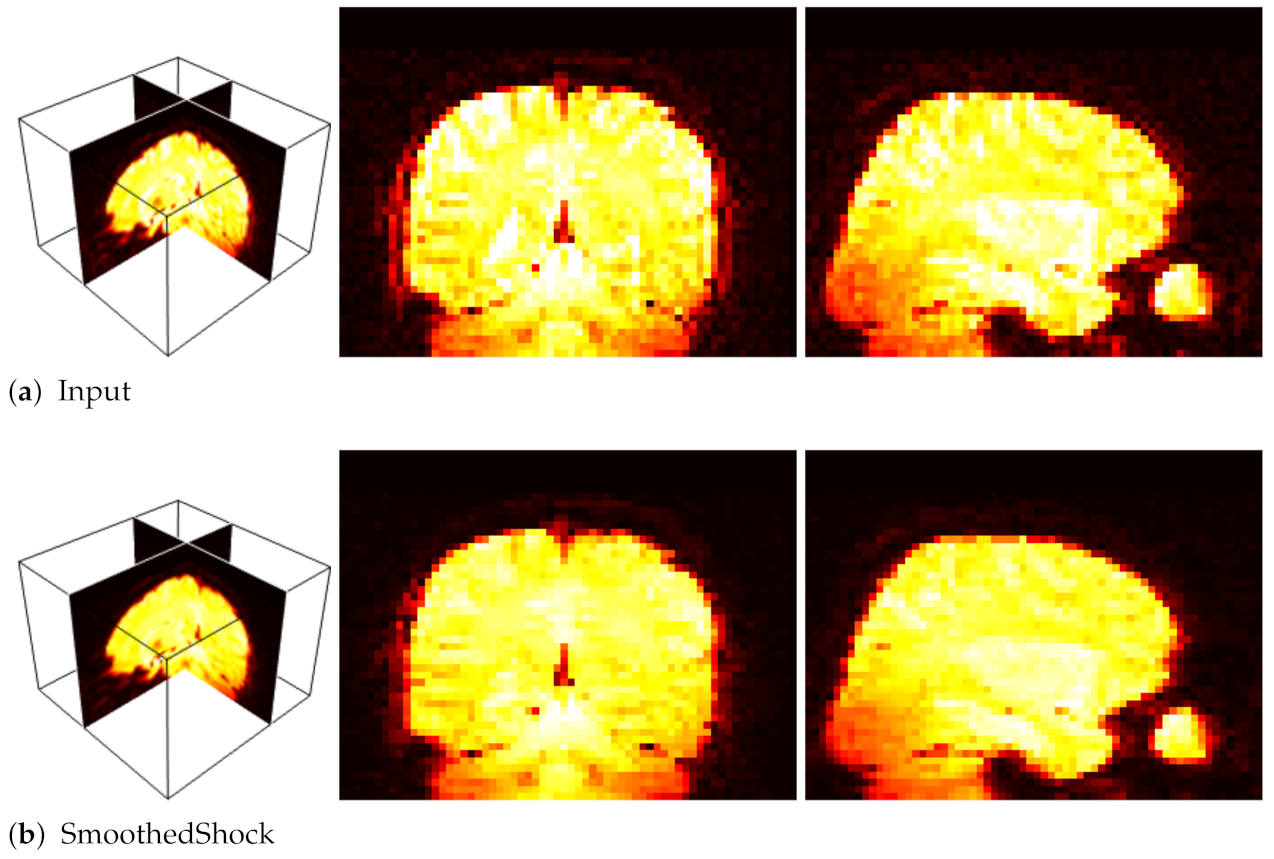
4.1. Image Segmentation
4.2. Image Classification
5. Discussion and Future Works
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Buades, A.; Coll, B.; Morel, J.M. A review of image denoising algorithms, with a new one. SIAM J. Multiscale Model. Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef]
- Goyal, B.; Dogra, A.; Agrawal, S.; Sohi, B.; Sharma, A. Image denoising review: From classical to state-of-the-art approaches. Inf. Fusion 2020, 55, 220–244. [Google Scholar] [CrossRef]
- Lebrun, M.; Colom, M.; Buades, A.; Morel, J.M. Secrets of image denoising cuisine. Acta Numer. 2012, 21, 475–576. [Google Scholar] [CrossRef] [Green Version]
- Motwani, M.; Gadiya, M.; Motwani, R.; Harris, F. Survey of image denoising techniques. In Proceedings of the GSP, Santa Clara, CA, USA, 27–30 September 2004. [Google Scholar]
- Huang, T.; Yang, G.; Tang, G. A fast two-dimensional median filtering algorithm. IEEE Trans. Acoust. Speech Signal Process. 1979, 27, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the IEEE ICCV, Bombay, India, 7 January 1998. [Google Scholar]
- Vacavant, A. Robust Image Processing: Definition, Algorithms and Evaluation; Université Clermont Auvergne: Clermont-Ferrand, France, 2018. [Google Scholar]
- Xie, J.; Xu, L.; Chen, E. Image denoising and inpainting with deep neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 341–349. [Google Scholar]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a Gaussian denoiser: Residual learning of deep CNN for image denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, S.; Li, Y.; Gool, L.V.; Timofte, R. Self-Guided Network for Fast Image Denoising. In Proceedings of the IEEE ICCV, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Kramer, H.; Bruckner, J.B. Iterations of a non-linear transformation for enhancement of digital images. Pattern Recognit. 1975, 7, 53–58. [Google Scholar] [CrossRef]
- Osher, S.; Rudin, L. Feature-oriented image enhancement using shock filters. SIAM J. Numer. Anal. 1990, 27, 919–940. [Google Scholar] [CrossRef]
- Weickert, J. Coherence-enhancing shock filters. In Proceedings of the Deutsche Arbeitsgemeinschaft für Mustererkennung Symposium, Magdeburg, Germany, 10–12 September 2003; pp. 1–8. [Google Scholar]
- Gilboa, G.; Sochen, N.; Zeevi, Y. Regularized shock filters and complex diffusion. In Proceedings of the ECCV, Prague, Czech Republic, 11–14 May 2004; pp. 399–313. [Google Scholar]
- Weickert, J. Coherence-enhancing diffusion filtering. Int. J. Comput. Vis. 1999, 31, 111–127. [Google Scholar] [CrossRef]
- Alvarez, L.; Mazorra, L. Signal and image restoration using shock filters and anisotropic diffusion. SIAM J. Numer. Anal. 1994, 31, 590–605. [Google Scholar] [CrossRef]
- Vacavant, A.; Albouy-Kissi, A.; Menguy, P.Y.; Solomon, J. Fast smoothed shock filtering. In Proceedings of the IEEE ICPR, Tsukuba, Japan, 11–15 November 2012. [Google Scholar]
- Kass, M.; Solomon, J. Smoothed local histogram filters. ACM Trans. Graph. 2010, 29, 100:1–100:10. [Google Scholar] [CrossRef]
- Witkin, A. Scale-space filtering. In Proceedings of the IJCAI, Karlsruhe, Germany, 8–12 August 1983. [Google Scholar]
- Brodatz, P. Textures: A Photographic Album for ARTISTS and Designers; Dover: New York, NY, USA, 1966; Volume 66. [Google Scholar]
- Vacavant, A. A novel definition of robustness for image processing algorithm. In Proceedings of the RRPR Workshop at IEEE ICPR, Cancún, Mexico, 4 December 2016; Volume 10214, pp. 75–87. [Google Scholar]
- Vacavant, A.; Lebre, M.A.; Rositi, H.; Grand-Brochier, M.; Strand, R. New definition of quality-scale robustness for image processing algorithms, with generalized uncertainty modeling, applied to denoising and segmentation. In Proceedings of the RRPR workshop at IEEE ICPR, Beijing, China, 20 August 2018; Volume 11455, pp. 138–149. [Google Scholar]
- Lansel, S.; Donoho, D.; Weissman, T. DenoiseLab: A Standard Test Set and Evaluation Method to Compare Denoising Algorithms; Benchmarks and Matlab Software Online; 2009. [Google Scholar]
- Wang, Z. Mean squared error: Love it or leave it? A new look at signal fidelity measures. IEEE Signal Process. Mag. 2009, 26, 98–117. [Google Scholar] [CrossRef]
- Felzenszwalb, P.; Huttenlocher, D. Efficient graph-based image segmentation. Int. J. Comput. Vis. 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Vacavant, A.; Ali, A.R.; Grand-Brochier, M.; Albouy-Kissi, A.; Boire, J.Y.; Alfidja, A.; Chabrot, P. Smoothed shock filtered defuzzification with Zernike moments for liver tumor extraction in MR images. In Proceedings of the IEEE IPTA, Orléans, France, 10–13 November 2015. [Google Scholar]
- Roy, S.; Agarwal, H.K.; Carass, A.; Bai, Y.; Pham, D.L.; Prince, J.L. Fuzzy C-Means with Variable Compactness. In Proceedings of the IEEE International Symposium on Biomedical Imaging, Paris, France, 14–17 May 2008. [Google Scholar]
- Pudil, P.; Novovičová, J.; Kittler, J. Floating Search Methods in Feature Selection. Pattern Recognit. Lett. 1994, 15, 1119–1125. [Google Scholar] [CrossRef]
- Sladoje, N.; Lindblad, J.; Nyström, I. Defuzzification of Discrete Objects by Optimizing Area and Perimeter Similarity. In Proceedings of the IEEE ICPR, Cambridge, UK, 23–26 August 2004. [Google Scholar]
- Fournel, A.; Reynaud, E. Exploring Whole Brain fMRI Data with Unsupervised Artificial Neural Networks. In Proceedings of the PRNI, Seoul, Korea, 6–18 May 2011. [Google Scholar]
- Fournel, A.; Reynaud, E.; Brammer, M.; Simmons, A.; Ginestet, C. Group analysis of self-organizing maps based on functional MRI using restricted Fréchet means. NeuroImage 2013, 76, 373–385. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jenkinson, M.; Smith, S. A global optimisation method for robust affine registration of brain images. Med. Image Anal. 2001, 5, 143–156. [Google Scholar] [CrossRef]
- Jenkinson, M.; Bannister, P.; Brady, J.; Smith, S. Improved optimisation for the robust and accurate linear registration and motion correction of brain images. NeuroImage 2002, 17, 825–841. [Google Scholar] [CrossRef] [PubMed]
- Neiva, M.; Vacavant, A.; Bruno, O. Improving texture extraction and classification using smoothed morphological operators. Digit. Signal Process. 2018, 83, 24–34. [Google Scholar] [CrossRef]
- Ojala, T.; Maenpaa, T.; Pietikainen, M.; Viertola, J.; Kyllonen, J.; Huovinen, S. Outex—New framework for empirical evaluation of texture analysis algorithms. In Proceedings of the IEEE ICPR, Quebec, QC, Canada, 11–15 August 2002; Volume 1, pp. 701–706. [Google Scholar]
- Pickard, R.; Graszyk, C.; Mann, S.; Wachman, J.; Pickard, L.; Campbell, L. Vistex Database; MIT: Cambridge, MA, USA, 1995. [Google Scholar]
- Backes, A.R.; Casanova, D.; Bruno, O.M. Color texture analysis based on fractal descriptors. Pattern Recognit. 2012, 45, 1984–1992. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Setup | Gaussian Kernel | Laplacian Operator | Number of Iterations |
|---|---|---|---|
| Standard, for most applications | |||
| Water colorization | |||
| Sharpening | – | ||
| Scale-space representation | – | – | |
| Original shock filtering | – | – | |
| Smoothed median filtering | – | ||
| Median filtering | – |
| Method | Recall | Precision | F-Measure |
|---|---|---|---|
| FLIRT | 0.761 | 0.733 | 0.747 |
| OriginalShock | 0.797 | 0.777 | 0.787 |
| Median | 0.824 | 0.811 | 0.817 |
| SmoothedShock | 0.829 | 0.811 | 0.820 |
| (a) KNN | |||||||
| Dataset | Original | Smoothed shock | Gaussian | Diffusion | |||
| CCR (feat.) | CCR (feat.) | It. | CCR (feat.) | It. | CCR (feat.) | It. | |
| Outex | 75.59 (LBPV) | 84.78 (GLDM) | 83.01 (CLBP) | 82.94 (CLBP) | |||
| Brodatz | 97.6 (CLBP) | 98.11 (CLBP) | 97.20 (CLBP) | 97.84 (CLBP) | |||
| Usptex | 83.1 (CLBP) | 88.66 (CLBP) | 85.21 (CLBP) | 88.57 (CLBP) | |||
| Vistex | 98.96 (CLBP) | 99.31 (CLBP) | 98.96 (CLBP) | 99.54 (CLBP) | |||
| (b) Naive Bayes | |||||||
| Dataset | Original | Smoothed shock | Gaussian | Diffusion | |||
| CCR (feat.) | CCR (feat.) | It. | CCR (feat.) | It. | CCR (feat.) | It. | |
| Outex | 80.81 (LBP) | 86.47 (LBP) | 83.01 (LBP) | 85.15 (CLBP) | |||
| Brodatz | 96.6 (CLBP) | 98.02 (CLBP) | 96.85 (CLBP) | 97.47 (CLBP) | |||
| Usptex | 85.77 (CLBP) | 91.49 (CLBP) | 86.43 (CLBP) | 89.66 (CLBP) | |||
| Vistex | 97.33 (CLBP) | 98.50 (CLBP) | 98.50 (CLBP) | 97.92 (CLBP) | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vacavant, A. Smoothed Shock Filtering: Algorithm and Applications. J. Imaging 2021, 7, 56. https://doi.org/10.3390/jimaging7030056
Vacavant A. Smoothed Shock Filtering: Algorithm and Applications. Journal of Imaging. 2021; 7(3):56. https://doi.org/10.3390/jimaging7030056
Chicago/Turabian StyleVacavant, Antoine. 2021. "Smoothed Shock Filtering: Algorithm and Applications" Journal of Imaging 7, no. 3: 56. https://doi.org/10.3390/jimaging7030056
APA StyleVacavant, A. (2021). Smoothed Shock Filtering: Algorithm and Applications. Journal of Imaging, 7(3), 56. https://doi.org/10.3390/jimaging7030056