1. Introduction
Unmanned aerial vehicles (UAVs) have become a ubiquitous part of our daily lives, with their applications ranging from aerial photography to military reconnaissance [
1,
2]. The term UAV, also known as a drone, refers to a flying vehicle that can be remotely controlled or operated autonomously. The versatility of drones has made them an essential tool for a wide range of industries, from agriculture [
3] and construction to emergency services and national security. Drones’ autonomy is one of their most important characteristics, especially for military and security purposes. Drones with autonomous piloting may be pre-programmed with precise flight paths and can fly without human control [
4]. Since drones may be employed for reconnaissance and surveillance tasks in military and security operations, this function is very beneficial.
Another critical feature of drones, particularly for military and security purposes, is real-time object detection. Drones equipped with object detection technologies can identify and follow both stationary and moving objects in real-time [
5]. Advanced sensors and cameras that drones may be fitted with allow them to instantly detect and monitor possible threats, giving military and security personnel vital knowledge in real time. For real-time object detection, cutting-edge machine learning techniques and computer vision technologies are employed. These algorithms enable drones to recognize and classify diverse things within their field of view based on patterns and characteristics discovered by their sensors and cameras. The algorithms may also be trained to identify new objects and improve their accuracy over time, making them better and better at recognizing and tracking objects in a range of situations.
However, there are a number of challenges associated with real-time object detection, particularly in the processing and interpretation of data. Drones generate a lot of data, including images, video recordings, and sensor readings, which must be instantly evaluated in order to successfully detect objects. This necessitates efficient infrastructure for data transmission and storage in addition to reliable processing hardware and software. Assuring the precision and dependability of object detection algorithms is another difficulty, particularly in complex and dynamic situations. For example, a drone flying in a crowded urban area may encounter a wide range of objects and obstacles, including buildings, trees, bikes, cars, pedestrians, animals, and other drones. The algorithms must be able to distinguish between different objects and accurately track their movements, even in challenging conditions such as poor lighting or inclement weather conditions. Despite these difficulties, real-time object identification is a critical capability of drones in a variety of applications, from aerial photography to military surveillance and beyond. Drones will probably become much more adaptable and efficient as technology develops over time, with the capacity to find and follow objects in surroundings that are more complicated and dynamic.
Alongside military and security applications, drones are also very useful for a wide range of commercial and civilian applications. For example, drones can be used for aerial photography and videography. This allows photographers and filmmakers to capture stunning images and footage from unique perspectives without risking human life [
6]. Drones can also be used for mapping and surveying applications [
7], allowing for the rapid and accurate collection of geographical data. In the agriculture industry, drones are increasingly being used for crop monitoring and management purposes. Drones equipped with advanced sensors and cameras can capture high-resolution images and data that can be used to detect crop stress, nutrient deficiencies, and other issues that can impact crop health and yield effects. This information can then be used to make data-driven decisions about the crop management sector, including irrigation, fertilization, and pest control. Drones are being utilized in emergency services for search and rescue operations, enabling rescuers to swiftly find and reach people in distant or inaccessible places. Drones using thermal imaging cameras can also be used to find people who went missing or who are buried under rubble or other materials [
8,
9].
The study in [
10] improved obstacle detection and collision avoidance in drones with weight constraints; the proposed method employs lightweight monocular cameras for depth computation. It extracts key point features using computer vision algorithms like Harris corner detector and SIFT, then matches them using Brute Force Matching (BFM) to detect increasing obstacle sizes as the drone approaches. Another paper [
11] presented an indoor obstacle detection algorithm that combines YOLO with a light field camera, offering a simpler setup than RGB-D sensors. It accurately calculates obstacle size and position using object information and depth maps, demonstrating higher detection accuracy indoors.
Overall, drones are a versatile and useful tool for a wide range of applications, from military and security to commercial and civilian. Drones are projected to become increasingly important in the years to come, delivering valuable insights and information in a variety of businesses and fields because of their capacity to function independently and detect objects in real time. Drones will surely advance and be able to carry out a larger variety of jobs and applications as technology continues to advance. However, it is also important to ensure that drones are used ethically and responsibly, particularly in military and security applications, to prevent potential risks and negative consequences. With the right guidance and regulations, drones have the potential to revolutionize many different industries and provide numerous benefits to society. From these perspectives, we have shown here an advanced deep learning model to effectively detect both static and moving objects in real time from unmanned aerial vehicle data. In this case, the proposed scenario is a UAV-based wireless sensor network (WSN) system where multiple UAVs collect data from a group of sensors while avoiding all obstacles in their traveling path and where the obstacles are detected based on the UAVs’ captured photography. The main contributions of this paper are as follows:
We have introduced an obstacle detection framework in UAV-aided WSNs based on UAV aerial photography;
First, the UAV-captured photography (i.e., images and videos) is processed using different image-processing tools;
Second, based on the processed data, the UAVs are trained using a YOLOv8-based object detection model to detect obstacles in their traveling path;
Finally, the results of the proposed YOLOv8-based model are analyzed for different scenarios and compared with the results of the other baseline models. The evaluation results show that the proposed YOLOv8 performs better in all cases.
This paper follows a specific organization that begins with a literature review in
Section 2, which provides a background on previous research in the field.
Section 3 represents the detailed system model of the proposed work.
Section 4 presents the proposed methodology, outlining the steps taken to achieve the research objectives.
Section 5 offers a detailed analysis of the experimental results, providing insights into the effectiveness of the proposed methodology, and, finally,
Section 6 concludes the paper.
2. Literature Review
UAVs are currently a trending topic in the research world, with numerous studies and projects exploring their potential applications and capabilities. Using the drone camera feature to detect and classify objects is one of the most important and useful features of UAVs. Different kinds of traditional machine learning, deep learning, as well as transfer learning models have been applied and tested. For example, in [
12], the authors propose three algorithms that combine an object detector and visual tracker for single-object detection and tracking in videos, using limited training data based on the convolutional neural network (CNN) model. The algorithms efficiently incorporate the temporal and contextual information of the target object by switching between the detector and tracker or using them in combination. Another study has used the TensorFlow object detection API to implement object detection on drone videos and compare the performance of different target detection algorithms [
13]. CNNs with transfer learning are used to recognize objects such as buildings, cars, trees, and people. The study shows that the choice of target detection algorithm affects detection accuracy and performance consumption in different ways. Hybrid models have also shown promises; for example, [
14] proposed a method for vehicle detection in UAV videos using a combination of optical flow, connected graph theory, and CNN–SVM algorithms, which achieved 98% accuracy in detecting vehicles in moving videos. However, those traditional models are computationally expensive and require a lot of processing power.
Apart from these, various lightweight models such as MobileNet, SSD, and YOLO have gathered attention for object detection using drones. Widodo et al. discussed the development of object detection using deep learning for drone-based medical aid delivery, using a combination of Single Shot Detector (SSD) and the MobileNet framework to efficiently detect and locate objects in video streams [
15]. Then, a real-time drone detection algorithm based on modified YOLOv3 with improvements in network structure and multi-scale detection achieved 95.60% accuracy and 96% average precision in detecting small drone objects [
16]. A paper [
17] applied the YOLOv3 algorithm for robust obstacle detection. It introduced the YOLOv3 network structure, multi-scale target detection principles, and implementation steps. Experimental results demonstrated improved robustness compared to YOLOv2, with increased detection in complex backgrounds, better lighting, low illumination contrast, and even in poor lighting conditions. YOLOv3 outperforms YOLOv2 by accurately detecting small, distant targets, such as pedestrians, in front of the track. After that, the newer version, YOLOv4, was introduced, and different studies found better accuracy and speed using this version [
18]. A further improved YOLOv4 model was proposed for small object detection in surveillance drones, achieving 2% better mean average precision (mAP) results on the VisDrone dataset while maintaining the same speed as the original YOLOv4 [
19]. A study [
20] proposed a real-time obstacle detection method for coal mine environments, addressing low illumination, motion blur, and other challenges. It combined DeblurGANv2 for image deblurring, a modified YOLOv4 with MobileNetv2 for faster detection, and SANet attention modules for better accuracy. Experimental results showed significant improvements in detection performance. However, YOLOv5 is one of the most popular methods. As an example, a study achieved high recall and mAP scores on a combined dataset from a challenge and a publicly available UAV dataset [
21]. The model leverages PANet neck and mosaic augmentation to improve the detection of small objects in complex background and lighting conditions. Some other papers proposed an improvised version of the YOLOv5 model for object detection and compared its performance to the original YOLOv5 model [
22,
23]. Another study proposed a YOLOv5-like architecture with ConvMixers and an additional prediction head for object detection using UAVs, which were trained and tested on the VisDrone 2021 dataset. Furthermore, the authors in [
24] modified the YOLOv5 architecture for better aerial image analysis performance, concentrating on uses like mapping land usage and environmental monitoring.
Then, YOLOv6, a newer version with faster inference and accuracy, came into play. A study evaluated YOLOv6 for fire detection in Korea, showing high performance and real-time capabilities [
25]. XGBoost achieved the highest accuracy for object identification. Data augmentation and Efficient Net improved YOLOv6’s performance. However, limitations included smoke classification and accuracy in poorly illuminated environments. Another piece of research suggested a transfer learning-based model using YOLOv6 for real-time object detection in embedded environments [
26]. Pruning and finetuning algorithms improve accuracy and speed. The model identifies objects and provides voice output. It outperforms other models, is simple to set up, and has the potential for assisting visually impaired individuals in an IoT environment. But the model faces difficulty identifying objects against textured backgrounds and potential challenges in compressing network width.
Still, the YOLOv6 model requires a large dataset and is computationally expensive. Thus, recently, YOLOv7 was introduced, producing a higher mAP on the COCO dataset than YOLOv6, using the EfficientRep backbone and SimOTA training. It is also faster and more efficient at using GPU hardware. A few studies have been conducted to perform object detection using YOLOv7 [
27,
28,
29]. The authors in [
27] used an improved YOLOv7-based object detection method designed specifically for marine unmanned aerial vehicle (UAV) photos. In [
28], the proposed YOLOv7–UAV algorithm performs UAV-based object detection tasks with better accuracy, making it appropriate for use in remote sensing, agriculture, and surveillance. The improvements improve detection accuracy by altering the anchor box aspect ratios and using multi-scale training techniques. The study in [
29] supports sustainable agricultural practices and presents YOLOv7 as a useful tool for automated weed detection and crop management. But, as a complex model, YOLOv7 has scope to improve accuracy and reduce noise sensitivity. Furthermore, the work in [
30] was optimized for aerial photography taken by unmanned aerial vehicles (UAVs), wherein multi-scale characteristics were added to YOLOv7 to improve object detection precision in UAV photos. This is why, most recently, YOLOv8 has been revealed. In this paper, we have studied the latest version of YOLO, YOLOv8, for real-time object (i.e., obstacle) detection in wireless sensor networks (WSNs) based on unmanned aerial vehicle (UAV) photography.
3. System Model
Figure 1 represents the proposed system model of the considered WSN, which includes one base station, sensor nodes, UAVs, and obstacles (i.e., buildings, trees, vehicles, etc.). The sensors are located in pre-determined positions and are randomly distributed within an area. Each sensor periodically generates data and stores them in its buffer until a UAV arrives to collect the data while capturing images and videos. The UAV-captured images and videos are used to train the UAVs to detect obstacles in their tour. Each UAV has a specific velocity and flight duration. These parameters are crucial for ensuring that the UAV can successfully collect data from all the assigned sensors and return to the base station. The battery of a UAV is assumed to be fully charged at the beginning of the tour. Then, after finishing one data collection tour, the UAV battery is recharged from the base station using a wireless method.
Moreover, let us assume that there are a set of obstacles in the environment and that the positions of these obstacles are unknown. When a UAV starts traveling to collect data, it starts capturing images and videos. Based on these aerial photographs, the UAVs are trained to detect obstacles. If a UAV detects an obstacle along its path, which means it is located between two sensors that the UAV needs to visit sequentially for data collection, the UAV must take a detour to bypass the obstacle and reach the next sensor on its intended path. This detour is required to guarantee that the UAV, despite the presence of any obstacle, may effectively travel through the environment and gather data from all the sensors. The main focus of this study is detecting the obstacles on the UAV data collection tour. On the other hand, the UAV detouring problem can be solved using the GA w/VRAOA algorithm [
31] to build a UAV detour traveling path while detecting the obstacles. In general, the UAV travels to collect data from sensor nodes and the UAV data collection process is wireless, with 2 s UAV data reception time [
31]. The UAV travels in the communication range of the clustered area (contained within the sensor nodes and obstacles). The clustering can be predefined or can be performed by applying the K-means algorithm, similar to [
31]. Alternatively, the UAV communication security can be ensured using the efficient, secure communication infrastructure for UAVs [
32].
4. Methodology
The following sub-sections present the details of the implementation of the proposed method.
4.1. Image Acquisition
Data collection is an important step that involves gathering information from diverse, valid sources. In the context of this scenario, in this study, the data are initially collected from different online sources, including both images and videos. These online sources can be websites, social media platforms, online databases, or any other relevant online repository. A procedure for extracting the frames from the videos is used to transform the video content into photos. As a result, it is possible to compile a number of unique pictures that represent various scenes from that video. To supplement the dataset, other photographs from the internet are also collected in this dataset. Once the necessary data, including images and video frames, are collected from online sources, a custom dataset is formed.
Table 1 shows the statistics of the image dataset, where we have considered seven different types of obstacles (i.e., truck, person, tree, car, building, bus, and other obstacle) for the proposed system. A dataset serves as one of the most valuable for training machine learning models, conducting research, or performing analysis. The custom dataset is curated based on the specific requirements and objectives of the project, ensuring that it encompasses a diverse range of relevant data to support the intended goals.
Figure 2 shows some sample image datasets.
4.2. Image Pre-Processing
Data augmentation: Data augmentation is a widely used approach that helps to increase the diversity and variability of a dataset, with the goal of improving the performance and robustness of ML/AI models. During the process of collecting our real data, data augmentation techniques were applied to a few of the images to make the dataset more realistic. We have applied different data augmentation for the images, as follows.
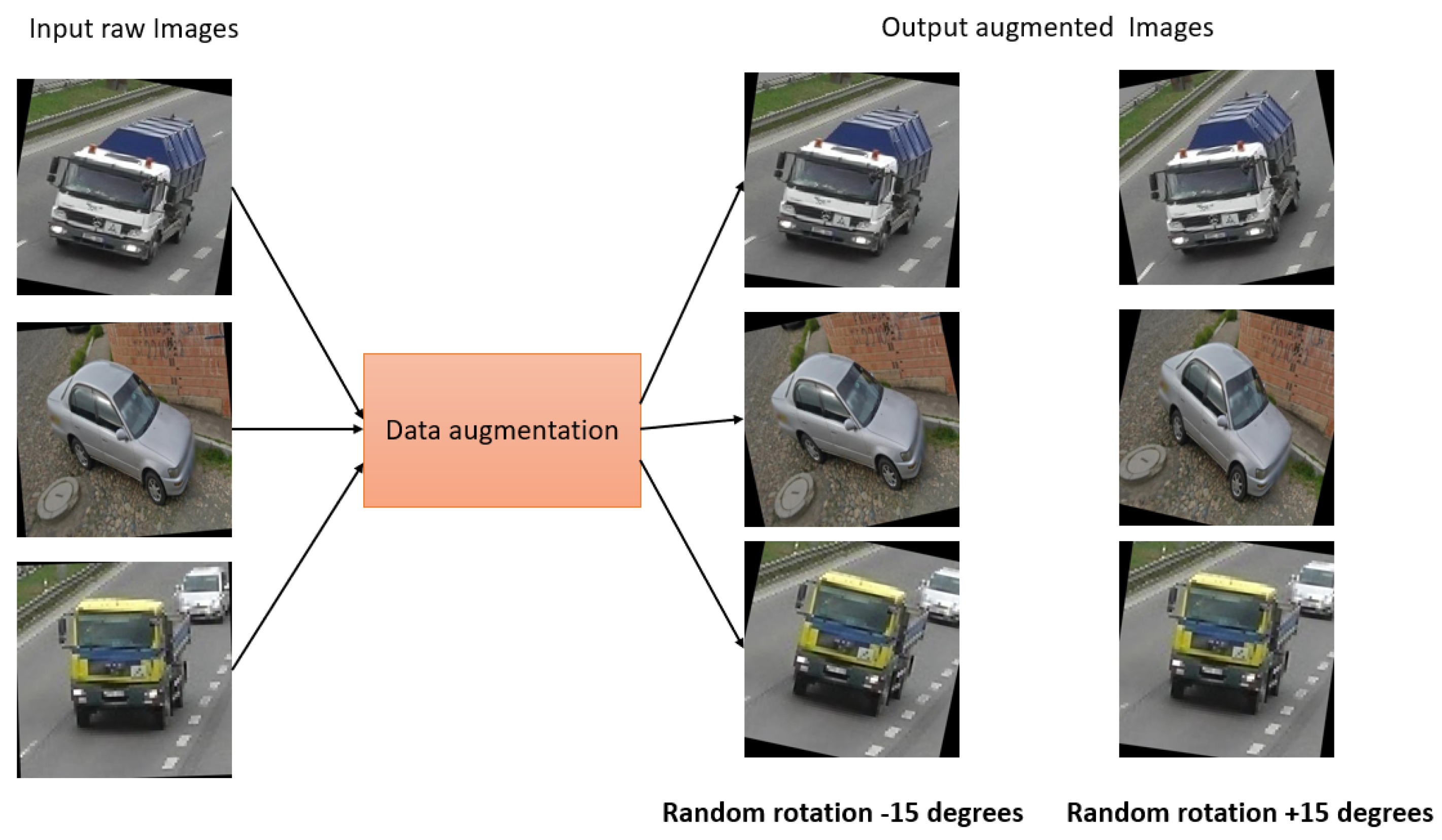
In case 1, for dark images, a random brightness adjustment was applied as a data augmentation step. The brightness was adjusted by a percentage of −25% to +25%. This technique helped us to enhance the visibility and clarity of dark images and to make them more suitable for analysis as well as model training. In case 2, we applied the rotation augmentation technique. In this method, a random rotation is applied to the specific images as a data augmentation step. Here, the rotation angle was randomly selected between −15 and +15 degrees. The dataset becomes more similar to the real-world situations by rotating the photos, where things can appear in a variety of orientations. This specific augmentation technique enables the model to learn and generalize better, even when faced with rotated images during inference or testing.
Then, the augmented data were combined with the other raw data acquired to create a custom dataset. This custom dataset then comprised both the original raw data and the augmented data. As a result, it became more representative of real-world scenarios and encompassed a broader range of variations, enhancing the dataset’s quality and increasing the model’s ability to generalize well. The augmented data introduced additional examples with altered attributes, such as brightness-adjusted or rotated images, which helps mitigate biases. In addition, this also helps to improve the robustness of the trained model. The custom dataset serves as a valuable resource for various applications and gave us the scope to leverage a more extensive and diverse collection of data for specific tasks. This facilitates better model training, validation, and evaluation, ultimately leading to more accurate and reliable results in the targeted domain.
Figure 3 and
Figure 4 show the sample image augmentation for both case 1 and case 2.
4.3. Image Resizing and Labeling
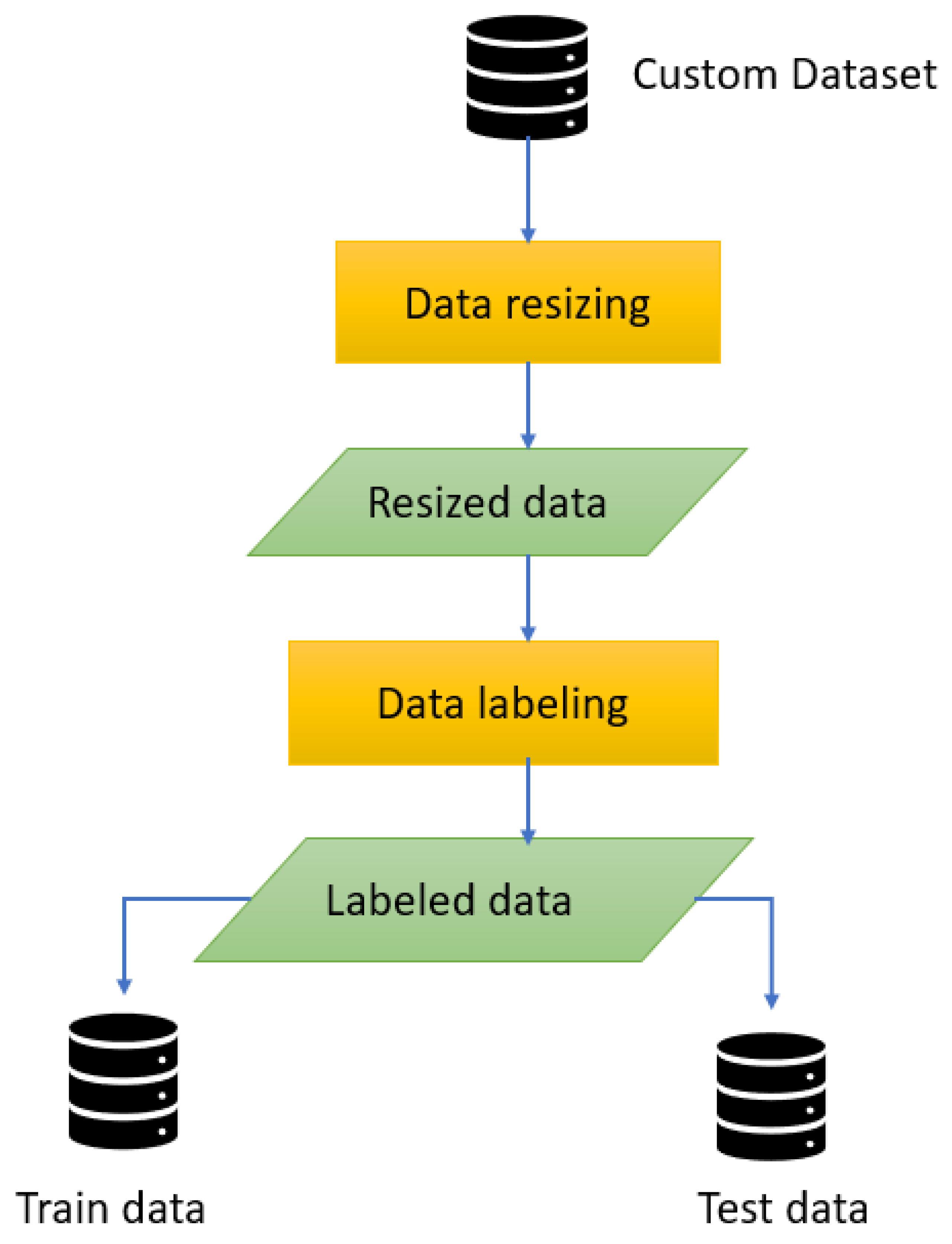
Resizing an image means giving all of the images the same shape. Thus, the custom dataset with all images was resized to 800 × 600 pixels [
33,
34]. After that, the resized images were labeled according to the seven classes shown in
Table 1. The Roboflow annotation operation was applied for labeling data into multiple classes. In
Figure 5, we have shown some sample labeled images for each class. Here, in first column, the input images are shown, then in second column the class with a bounded box is shown, and, lastly, the bounded box layer for each class is shown with different colors in last column. The class ID in a bounding box is the name of the obstacle. For example, in this work, the seven class IDs are ‘Truck’, ‘Person’, ‘Bus’, ‘Car’, ‘Tree’, ‘Building’, and ‘Other obstacles’, as displayed in
Figure 5. In this case, each bounding box indicates the obstacle, and each class ID represents the type of obstacle.
All the data pre-processing steps are displayed precisely in
Figure 6. After completing all the data pre-processing steps, the processed data were split into 70% train data, 20% test data, and 10% validation data for training the model.
4.4. Proposed Obstacle Detection Framework
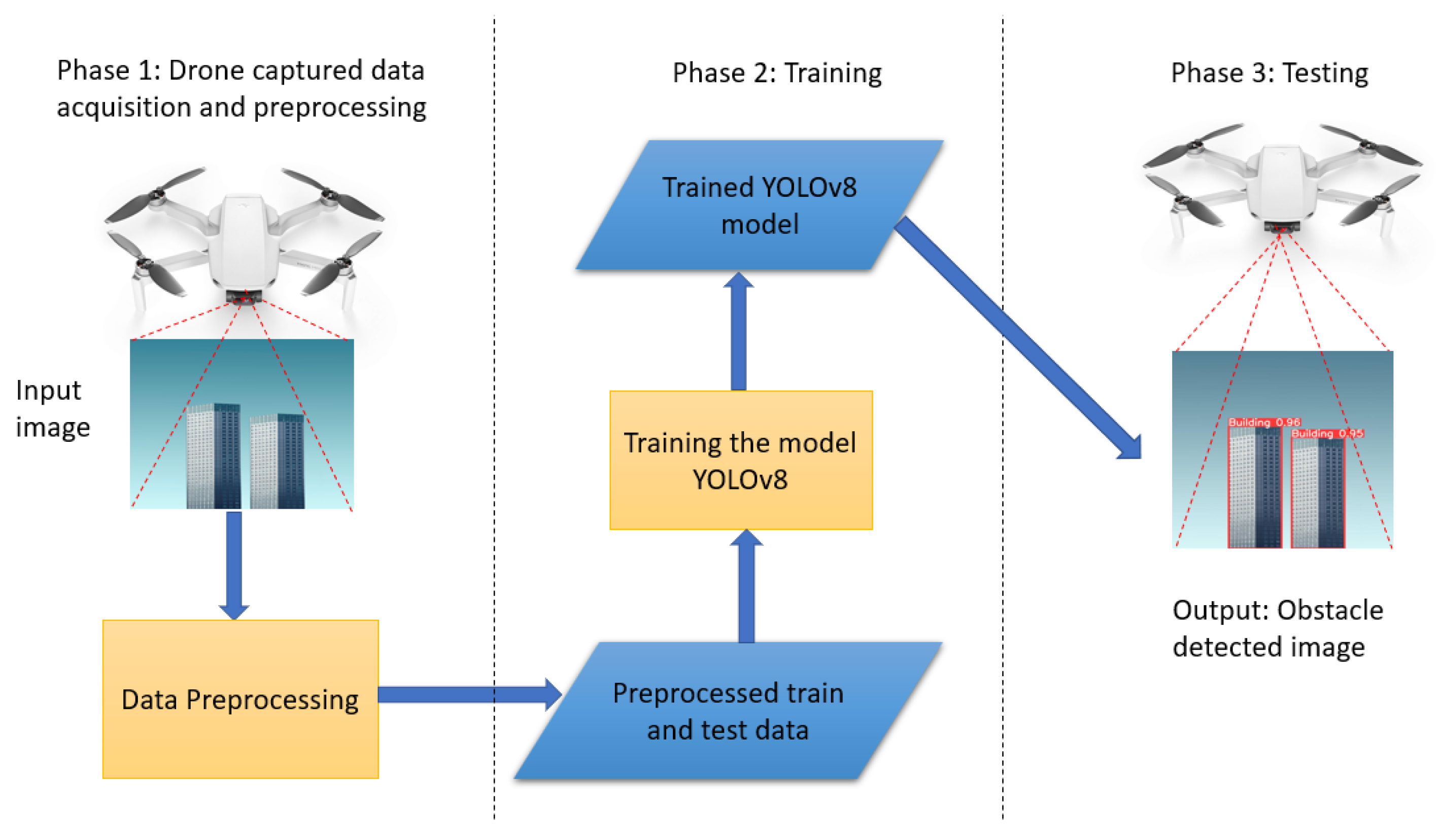
The proposed obstacle detection framework consists of the three main phases shown in
Figure 7. In Phase 1, the system collects image or video data through the drone camera and applies pre-processing steps such as stabilization, noise reduction, and enhancement to enhance the image’s quality and usability. In Phase 2, the pre-processed data are processed to generate training and testing datasets. To provide a sufficiently diverse and representative dataset, this step encompasses activities including bounding box generation, object annotation, and data augmentation approaches. Then, the proposed YOLOv8-based model is trained using the generated processed dataset.
Finally, in Phase 3, the trained YOLOv8 model is deployed and tested for real-time object detection using the drone. The model processes the live video feed from the drone and predicts the presence and location of objects of interest in real-time. This phase enables the detection of objects while the drone is in operation, allowing for immediate response or decision-making based on the detected objects in real-time. Overall, this framework provides a systematic approach for capturing data through a drone, pre-processing the data, training an object detection model, and performing real-time object detection using the drone.
6. Conclusions
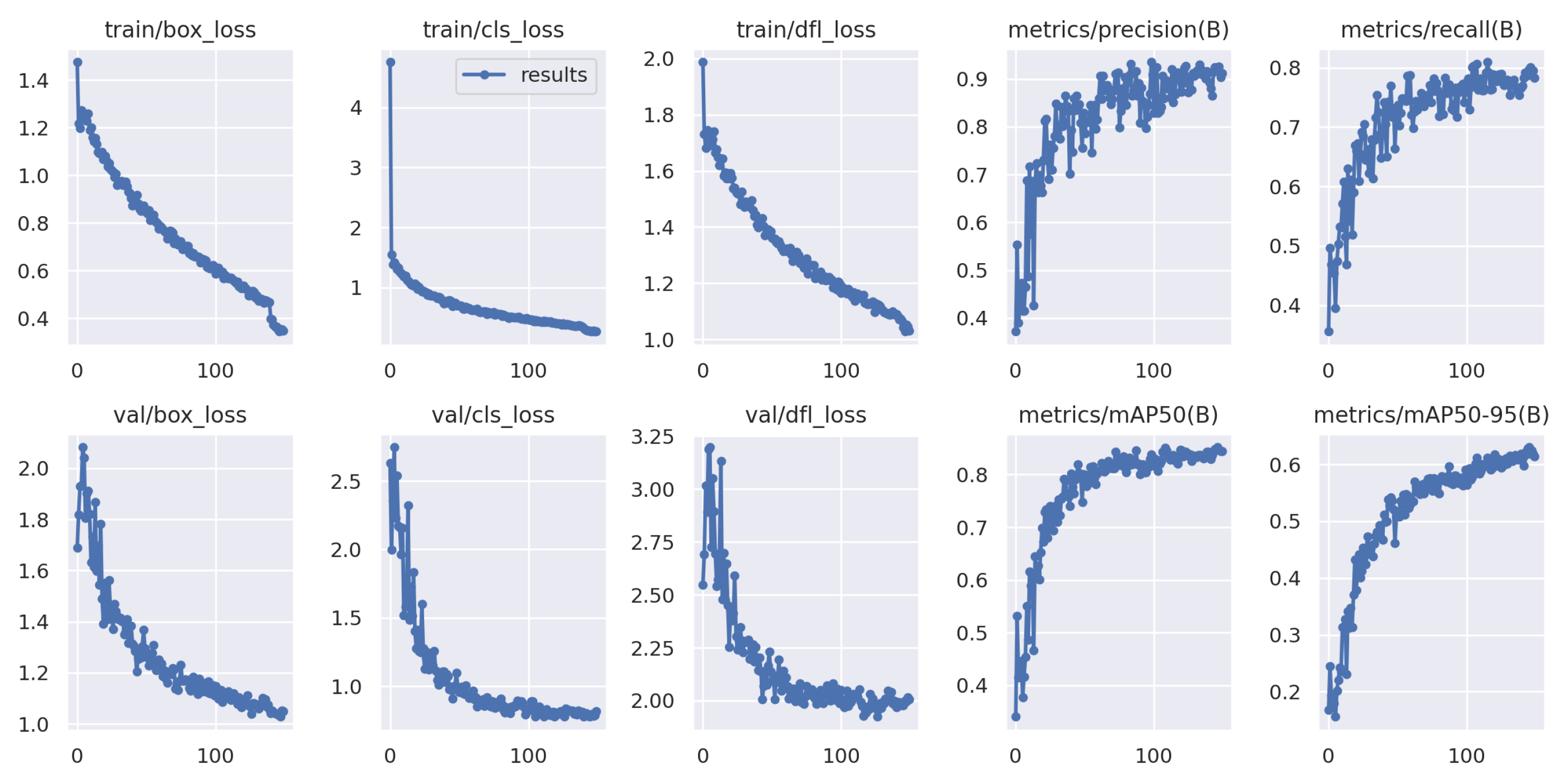
In this study, a YOLOv8-based obstacle detection framework is proposed for a UAV-aided data collection scheme in a WSN environment. This work focused on obstacle detection based on aerial photography from UAVs. The system includes multiple UAVs, multiple groups of sensors, and numerous obstacles, wherein UAVs collect data from a group of sensors while avoiding all obstacles in their path. The UAVs captured images or videos while they were traveling to collect data from the sensors. Then, the UAV aerial images and videos are processed using image processing tools, i.e., data augmentation, resizing, and labeling. After that, based on the processed data, the UAVs are trained using the YOLOv8-based model to detect obstacles in their traveling tour for both 100 and 150 iterations, as shown in
Figure 8 and
Figure 9. The best results are found after 111 iterations, with recall value of 78.2%, precision value of 89.99%, and 87.4% mAP. On the other hand, the predicted value in the confusion matrix shown in
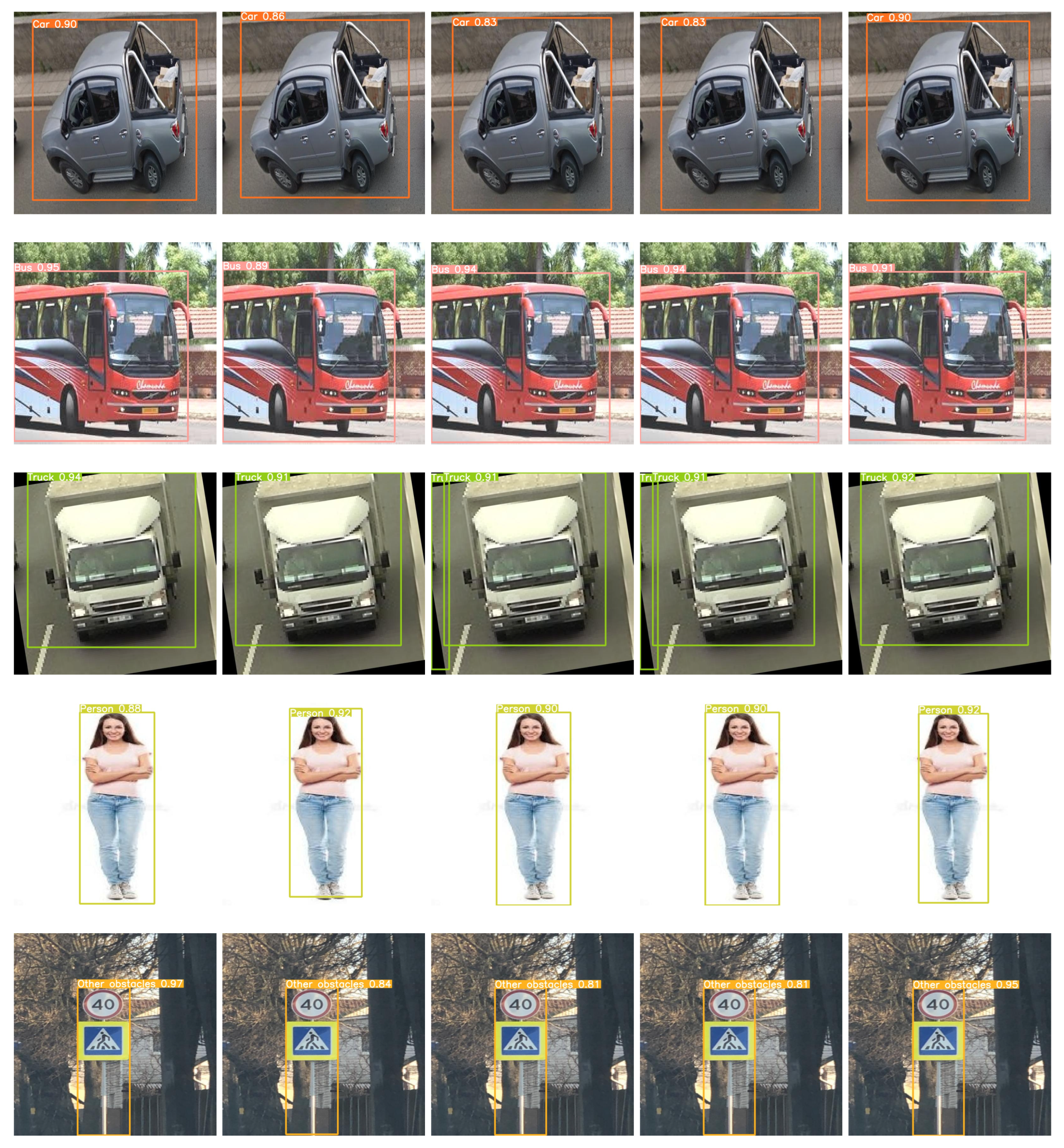
Figure 10 is quite high for all type of obstacles. The evaluation results show that YOLOv8 performs better than YOLOv7, YOLOv5, SSD, and Faster-RCNN in different scenarios, and the detection accuracy is also higher in YOLOv8 for different sample test images, as shown in
Figure 13.
Seven types of obstacles are considered in this work. In a real-world scenario, when a UAV collects data in WSNs, the obstacles can be many other types than these seven types, which is a limitation of this work. Generally, this project intends to train a UAV to detect obstacles in its traveling path and make the UAV operation more efficient. In future work, we intend to train the UAV with bigger datasets. We also intend to solve the problem of avoiding obstacles on its tour along with the obstacle detection problem using a machine learning-based (i.e., a reinforcement learning-based) UAV path-planning approach.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}