In most of the previously analyzed experiments, the velocity gradient varies strongly at various points in the system and, therefore, the evaluation of the average gradient is not easy. It is then useful to analyze more particularly the viscosity data in experiments where the gradient can be easily determined and, moreover, is quasi-uniform in the studied system. To carry out such experiments, two rotating experimental devices are used and their main characteristics are presented in the next section.
3.3.1. Presentation of Devices and Experimental Results
The first set-up used is a HAAKE DC60/1 device with a double cone rotor. Some geometrical characteristics of the rotor are grouped in
Table 1. The tank containing the liquid is temperature-controlled to an accuracy of 0.1 K. The rotor and the tank are made of stainless steel.
Depending on the filling of the tank, it is possible to shear the liquid only with the bottom cone (i.e., this kind of experiment will be called “simple cone”) or with both cones (and this kind of experiment will be called “double cone”). Moreover, with this instrument, it is possible to impose a linear stress ramp or a linear strain ramp as function of time.
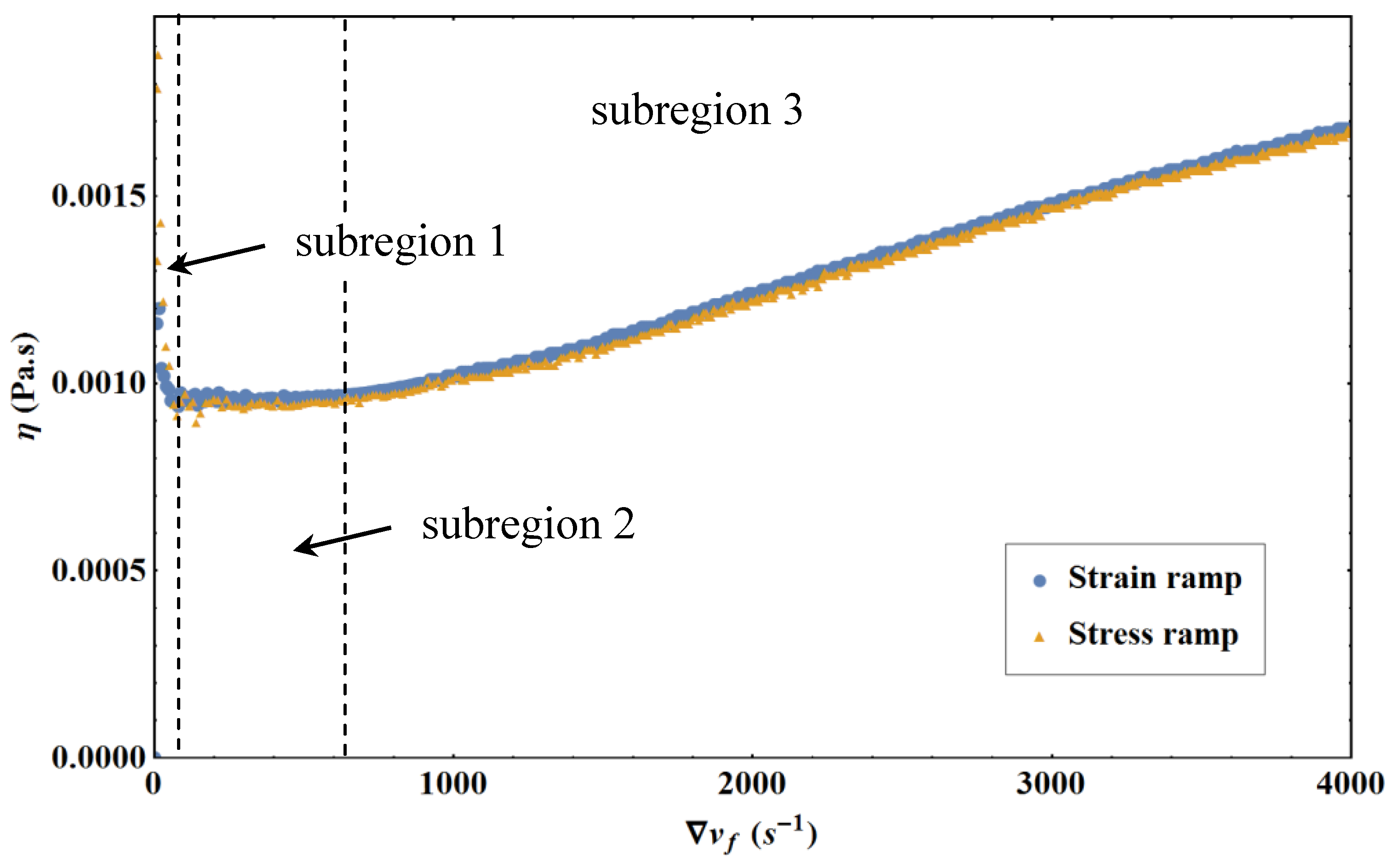
Figure 8 shows three regions where the viscosity behavior with the velocity gradient is significantly different: subregion 1 corresponds to the medium shear during the dynamic transition phase; in subregion 2, the viscosity is independent of the velocity gradient and, thus, corresponds to the value of the viscosity in the Newtonian regime; finally, subregion 3 shows a regular increase in viscosity with an inflection point in the vicinity of 2000 s
−1. This qualitative behavior is not specific to the double cone experiment, but is also observed in the simple cone experiment as well as with the second experimental device.
Figure 8 also shows that the results for liquid water in subregions 2 and 3 do not depend on the imposed linear ramp type; therefore, no distinction will be made between the results later on.
The second experimental device used is a Couette cell whose inner cylinder is fixed and whose outer cylinder rotates at a constant velocity in order to prevent the occurrence of the Taylor–Couette instability. The inner fixed cylinder ends with a conical shape at its base, corresponding to a thickness of 1 mm. Some geometrical characteristics of the Couette cell are grouped in
Table 2. The cell temperature is not regulated here and is at room temperature (i.e., ~293.15 K). It should be noted that the cell is made of polycarbonate, which is a weakly hydrophilic material. With this cell, we can only impose a linear rotation velocity ramp of the external cylinder as a function of time, which is equivalent to imposing a linear strain ramp as a function of time.
The volumes of water used in the double cone experiment and in the Couette cell are comparable. In the simple cone experiment, the volume is slightly lower than in the other two experiments. The characteristic values of these volumes are grouped in
Table 3. It should also be noted that the height of water in the Couette cell is much lower than the cylinder’s height in order to prevent liquid ejection during rotation.
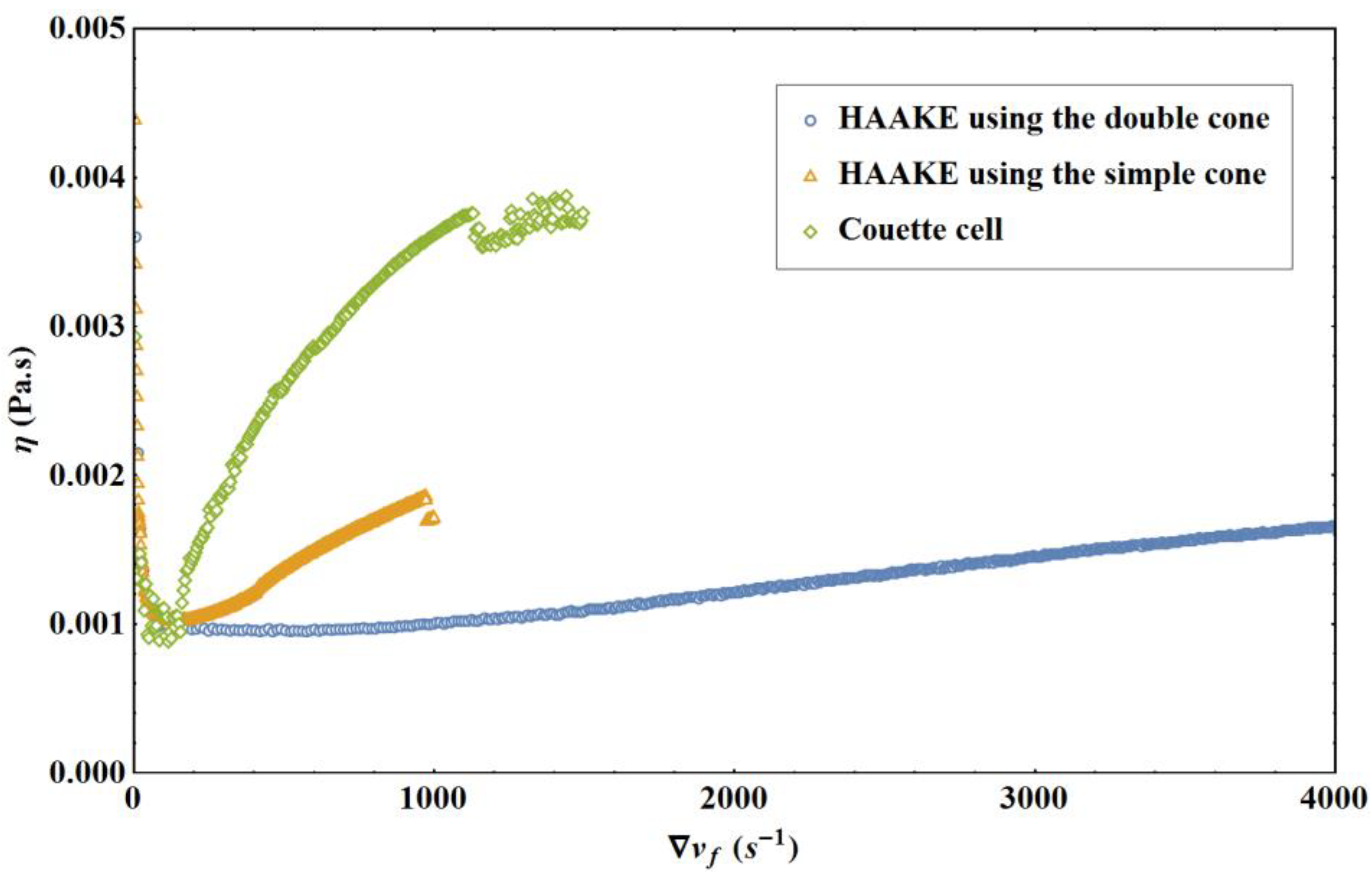
Figure 9 shows that, whether it is for the simple cone or the Couette cell, the three subregions described in
Figure 8 are observed. However, it can be noticed that the numerical values in subregion 3 are significantly higher with the simple cone and with the Couette cell than with the double cone. Moreover, “stalls” appear in subregion 3 at high shear rates. These differences are partly related to the presence of a free surface in the simple cone and Couette experiments, contrary to the case of the double cone experiment. However, the high numerical values obtained with the Couette cell are also due to the cell material, which causes a strong slip of the liquid, as we shall see.
Considering that the experimental results analyzed in the different devices involve linear strain ramps, it is useful to give some explanation on the measurements. A linear strain ramp is equivalent to imposing a linear ramp on the rotor angular velocity in the different experiments. The theoretical models established then allow us to transform this angular rotation velocity into a velocity gradient (e.g., see ref. [
1]). The torque exerted on the rotor is then measured and converted into stress from these theoretical models. The viscosity is then simply defined as the ratio of the stress to the velocity gradient.
Table 4 regroups the characteristic values of the linear strain ramp slopes imposed for the different types of data presented in
Figure 9. These values make it easy to convert the values of the velocity gradients into time and vice versa. The second line of
Table 4 allows us to check the agreement between the slopes of the strain ramps and the characteristic durations of the experiments.
Ultra-pure deionized water was used for the experiments presented in the paper. However, tests with different qualities of deionized water up to the use of tap water did not show any change in the observation of the different regimes as well as their variations. This is perfectly in line with the viscosity data for salt water that have been analyzed in Figure 56 of ref. [
7] and that show that the viscosity variations can be described in the same way as for liquid water. In other words, the quality of the water does not matter for the variations, and it is only the set of absolute values that are numerically shifted.
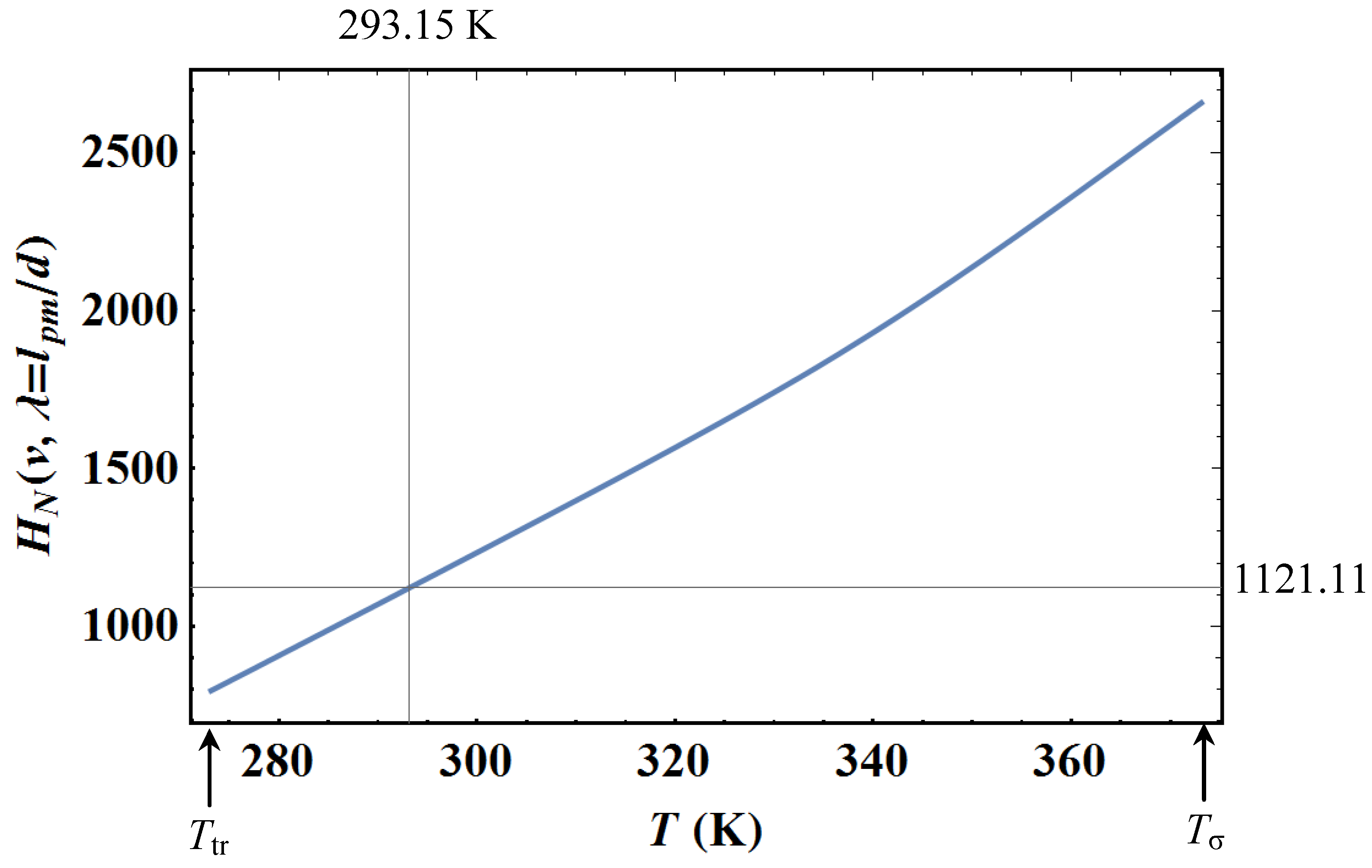
In all cases, the experimental conditions correspond to water at atmospheric pressure and a mean temperature of 293.15 K. For these conditions, the 1995 IAPWS state equation formulation (Ref. [
11]) gives a liquid water density
ρ = 0.998207 g/cm
3 and the 2008 IAPWS formulation (Ref. [
17]) gives a liquid water viscosity
η = 1.0016 mPa·s. The elastic mode theory (Ref. [
7]) gives a liquid water viscosity
η = 1.0018 mPa·s with a Knudsen term
. However, the apparatus constants in these experimental devices were set to find
η = 1.002 mPa·s. This said, the absolute values given by the experimental devices vary quite strongly, while the variations of viscosity as a function of the velocity gradient can be always superimposed for a given type of experiment. Changing the rise time by a factor of 2 to 4 leads to the same results to experimental precision.
Knowing the experimental conditions, the characteristic times of different processes can be determined.
Table 5 shows that the shortest characteristic time is the time
τ related to the propagation of the shear information. The viscous diffusion time
is several orders of magnitude higher than the stress relaxation time. This stress relaxation time for water is deduced from ref. [
8] for deformations higher than 60%, which is always the case in the experiments performed here.
Table 5 shows that the system has time to reach the steady state for each measurement made.
3.3.2. Experimental Results Analysis
The usual rheological models introduce non-dimensional numbers such as the Weissenberg number or the Reynolds number. However, in this new approach, other non-dimensional numbers are relevant, such as the parameter
λ, which represents the ratio between the injected mechanical energy and the energy of the elastic response of the system, or
, which represents the ratio between the action temperature and the re-action temperature (see ref. [
8]). If some of these dimensionless numbers can be related to usual dimensionless numbers, they should not be confused with them.
We will start by analyzing subregion 3 because it does not require us to calculate the viscosity absolute value in the Newtonian regime. One can simply take the experimental value corresponding to subregion 2, whatever its value. Indeed, if we note
the value of the viscosity in subregion 2 corresponding to the usual Newtonian regime for which it has been shown previously that the viscosity can be described using
only, then the influence of
λ on the viscosity value is to increase it with respect to the Newtonian regime in such a way that:
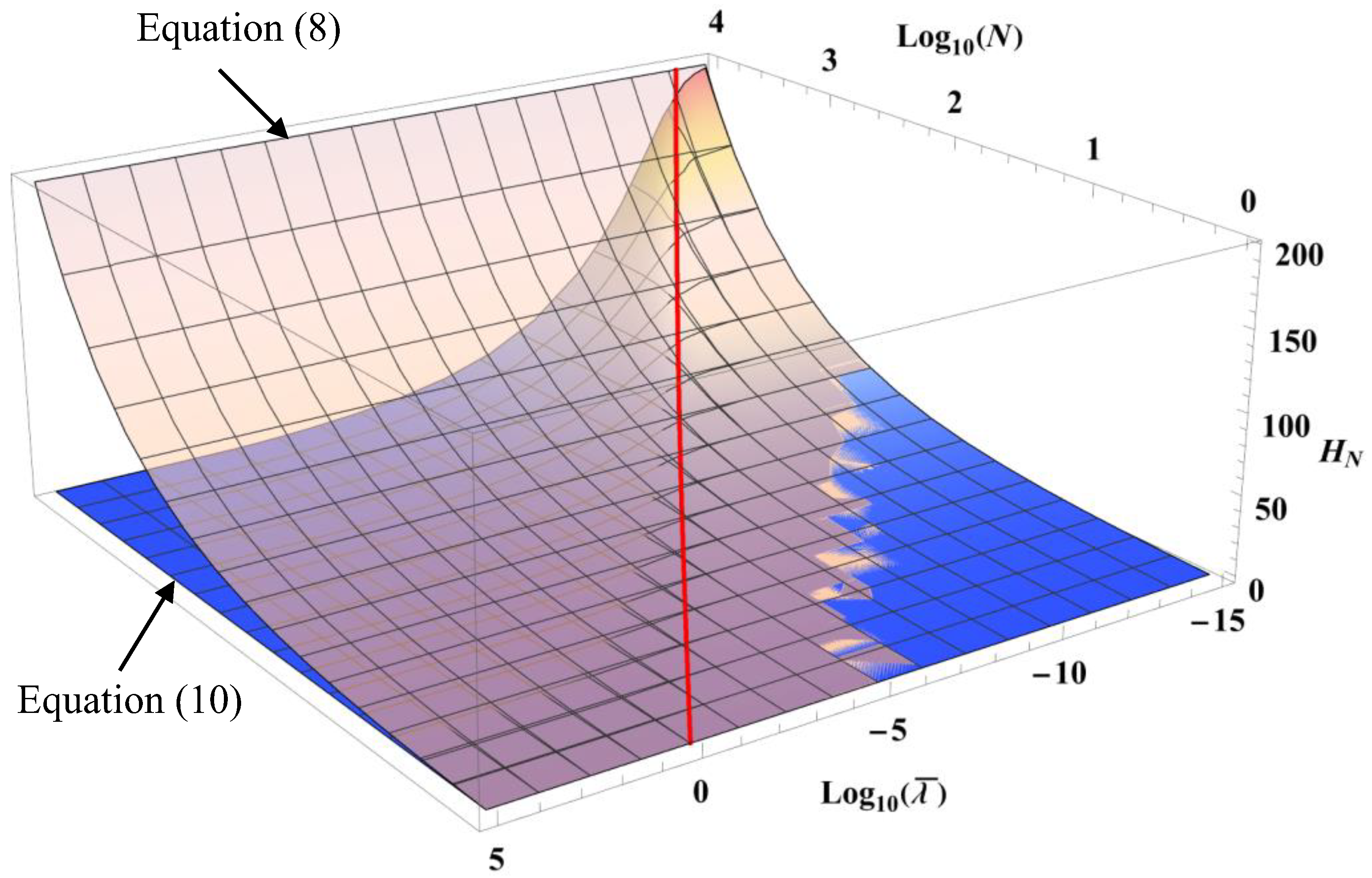
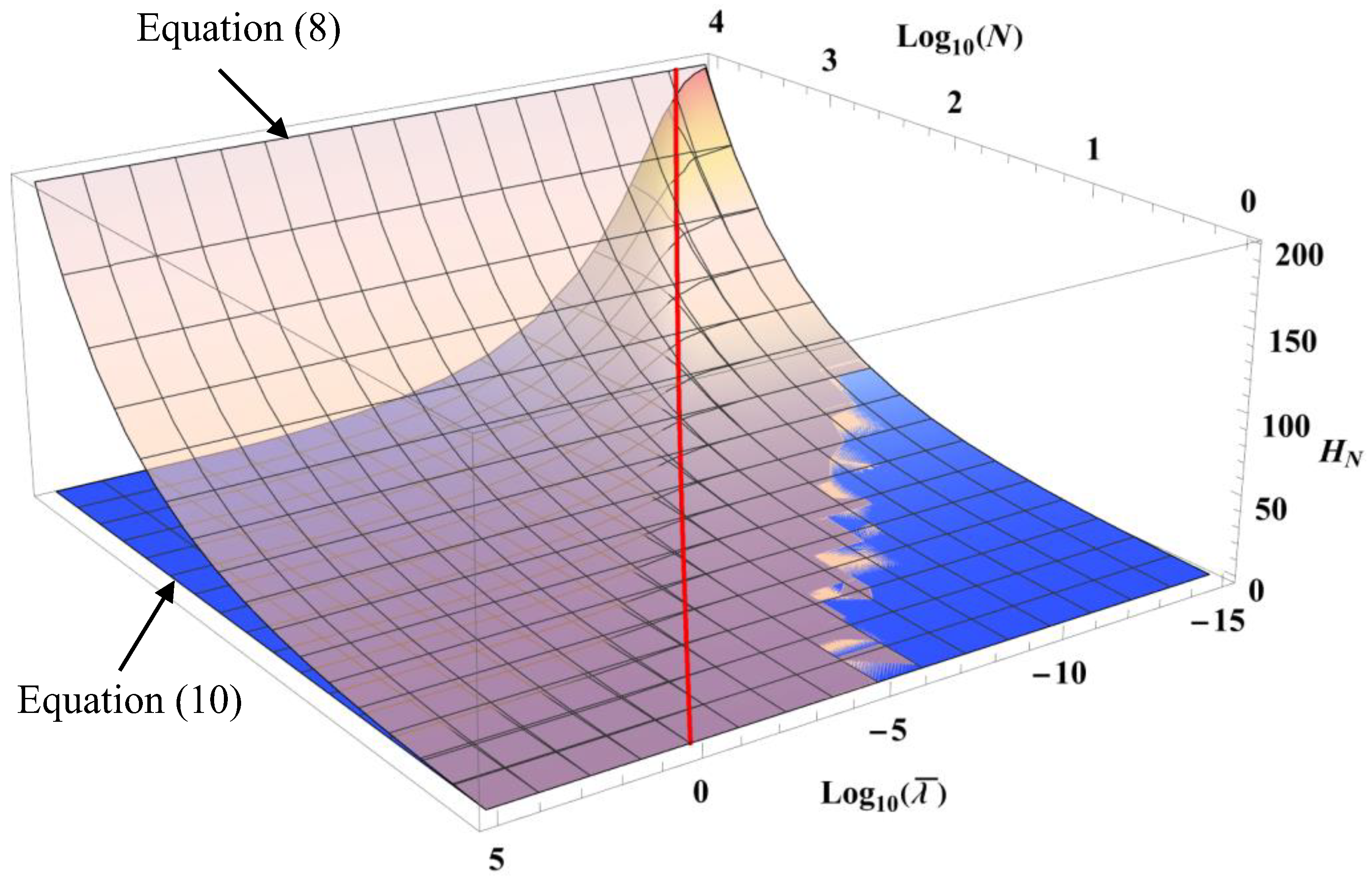
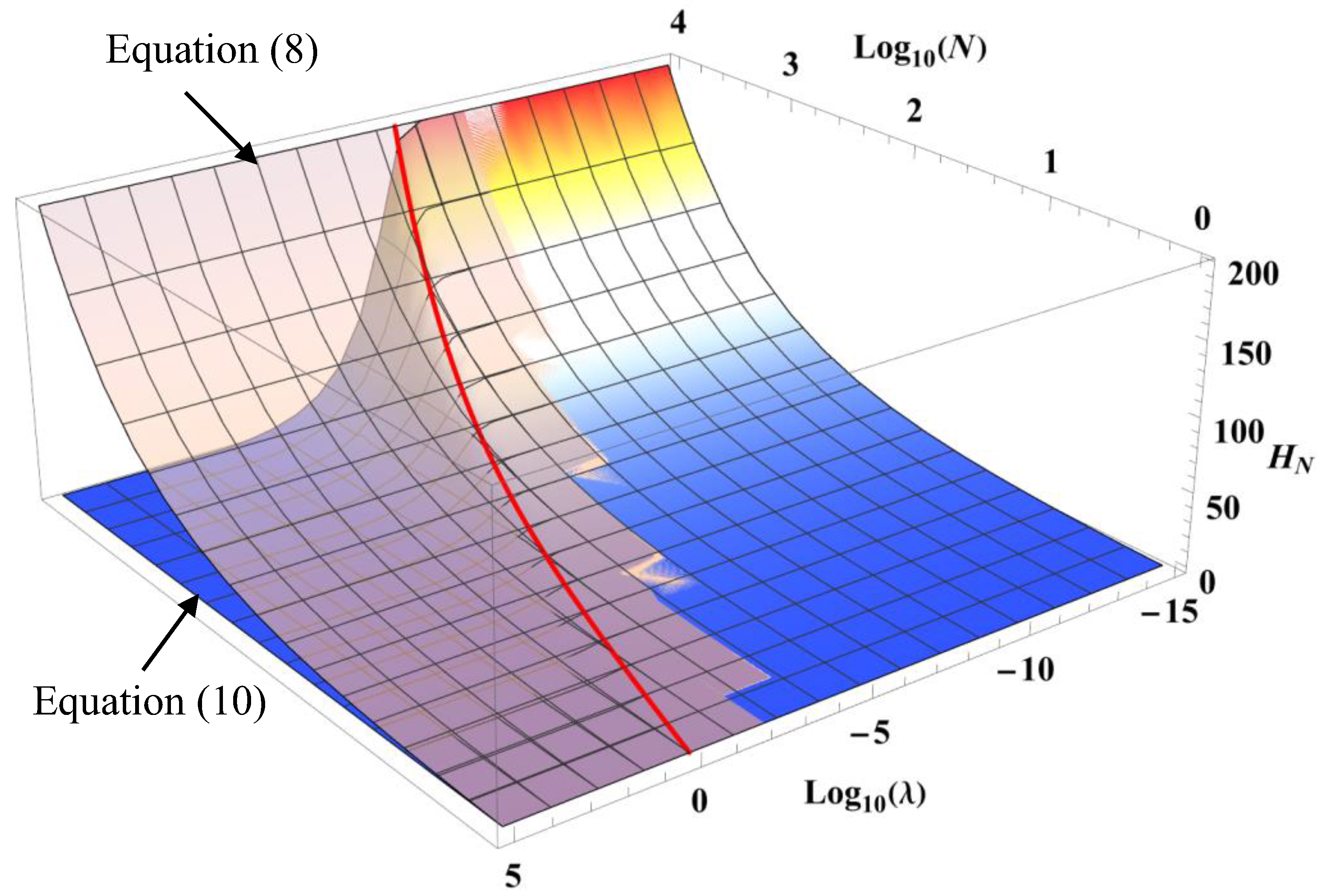
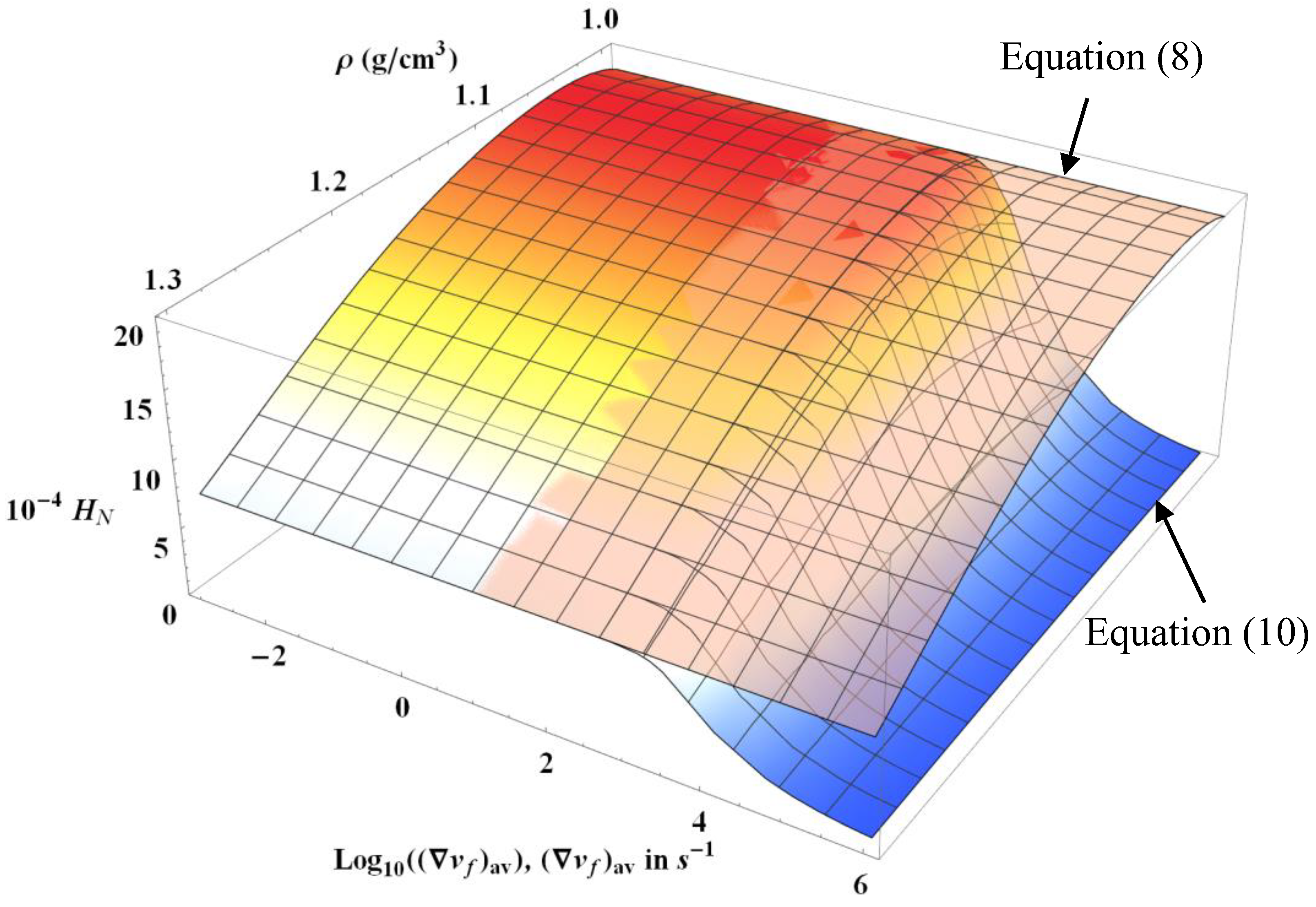
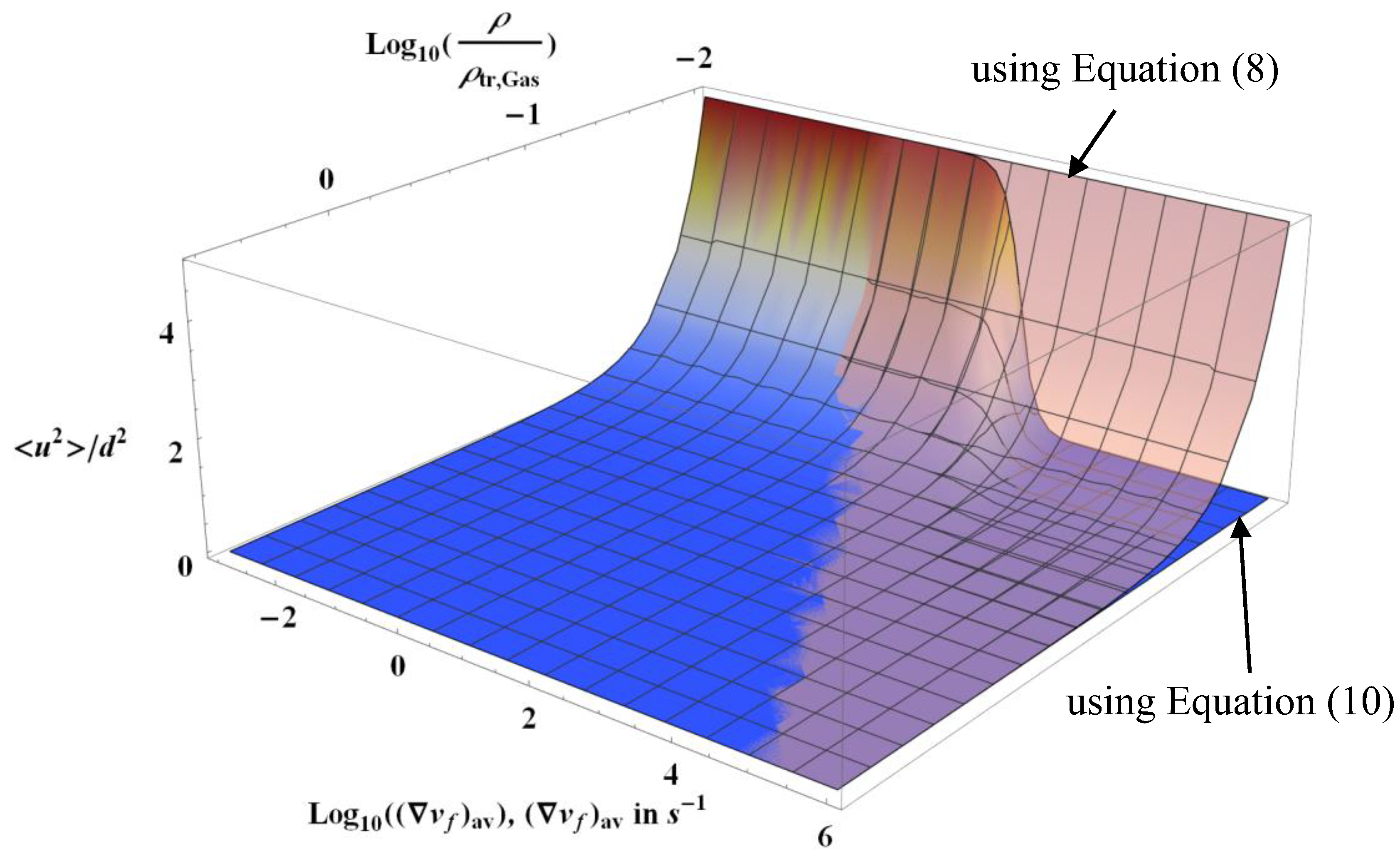
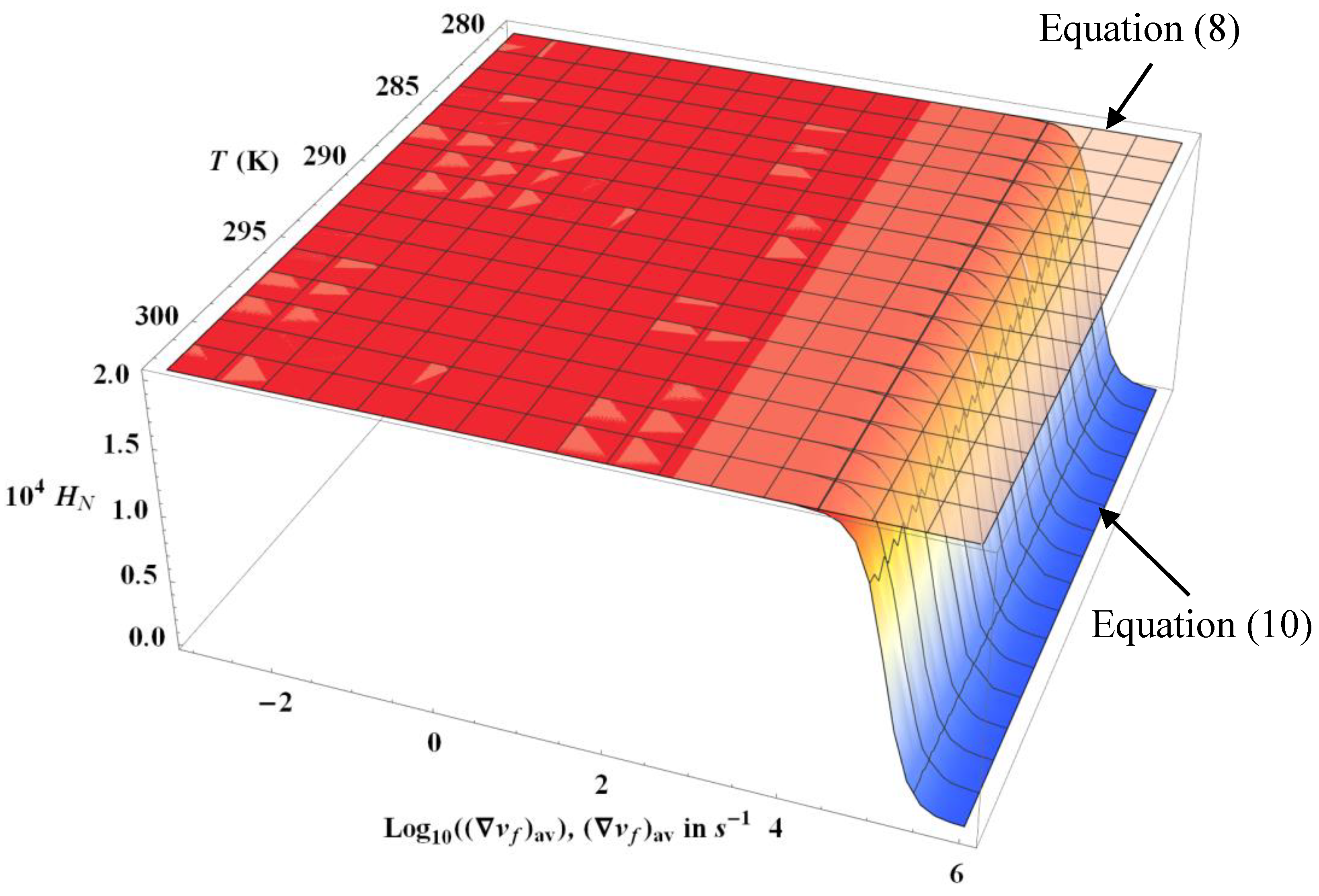
where
is given by Equation (8) and
by Equation (10). The viscous term
represents the gas-like term (also called the Knudsen term) corresponding to the contribution of the gas released by the action of the shear stresses. The parameters
v and
are two constants which depend only on temperature and density of the liquid. The value of
is determined experimentally from subregion 2. The quantity
λ being the variable, Equation (19) is then entirely determined if
N is known. Remember that
N is decomposed as follows in ref. [
7]:
where
represents the cut-off wave vector modulus of the elastic modes at the critical density
and
represents the fluctuative distance, whose value depends on some characteristic length of the experimental set-up. The distance
is therefore the only adjustable parameter of the model.
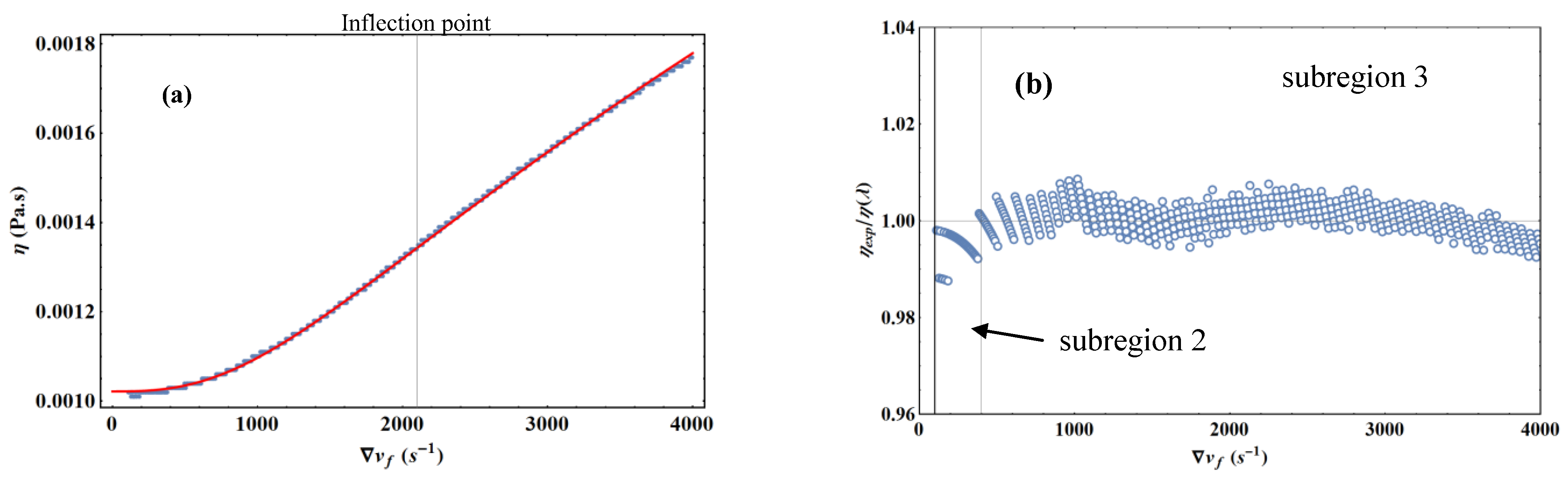
Figure 10a shows that Equation (19) makes it possible to reproduce very faithfully the evolution of viscosity in the whole subregion 3 by fixing
at the value of 1.3144 cm. The value of
is slightly lower than the cubic root of liquid water volume in this experimental run, i.e., 1.4342 cm. This value of
is perfectly in line with what is expected for this type of experimental device.
Figure 10b shows in a different form the comparison between the experimental data and Equation (19). It can be seen that the deviation is within an uncertainty band of ±1.5%. This uncertainty corresponds to that of the experimental device, which is about ±2%. Then, it can be noticed an oscillation of great “wavelength” of the uncertainty. This oscillation is in phase with the oscillation of the temperature control (±0.05 K) and is therefore inherent to the device itself.
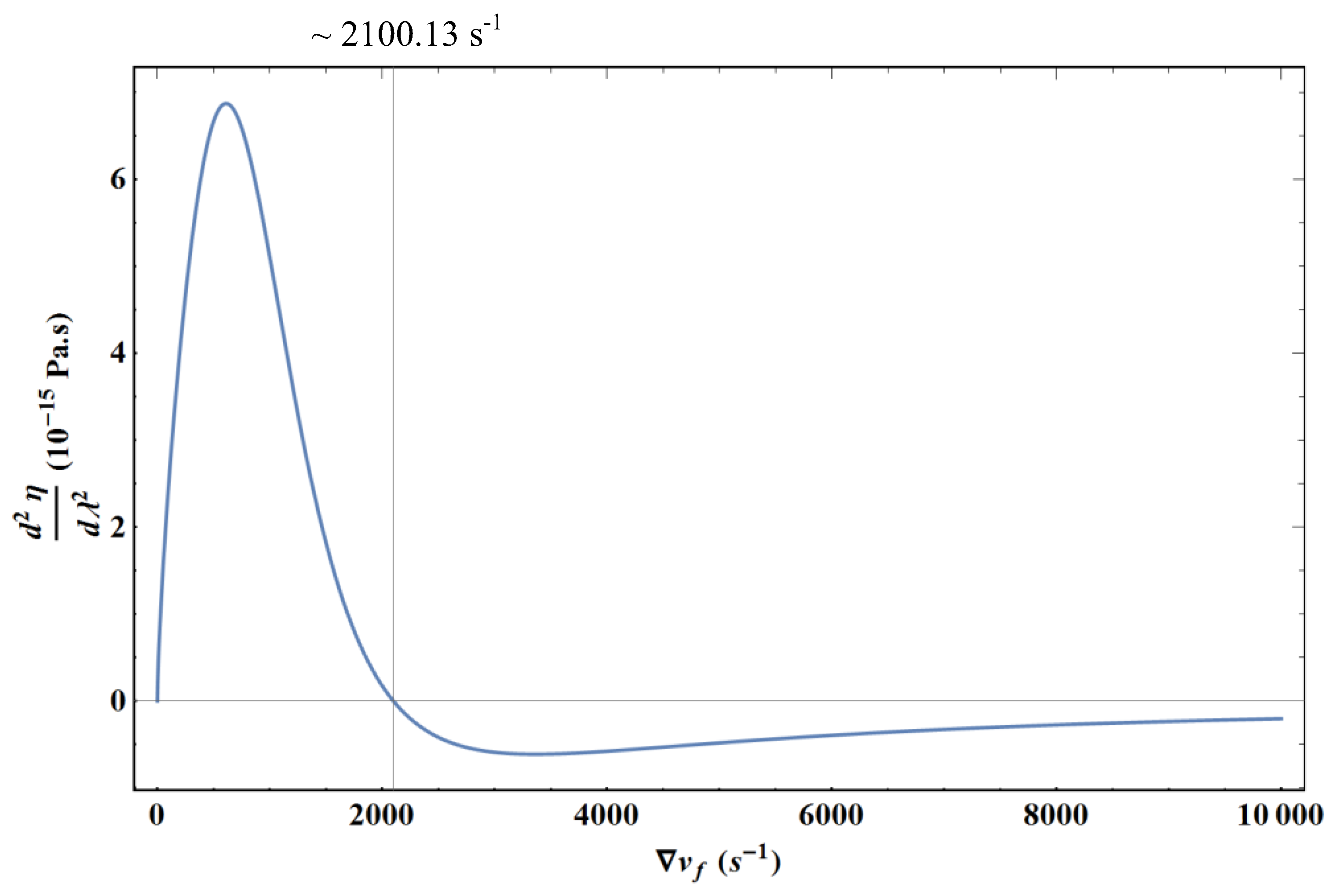
It was mentioned in the previous section that the viscosity evolution in subregion 3 admitted an inflection point.
Figure 11 shows very clearly the existence of this inflection point at 2100.13 s
−1 and indicates a positive curvature of the viscosity variation for lower velocity gradients, while the curvature is negative for high values of the velocity gradient. One has the feeling that the curve tends asymptotically to zero when the velocity gradient becomes very large. From a theoretical point of view, given Equation (9), Equation (19) is written in the limit:
The second derivative of Equation (21) is such that:
Thus, when
v > 1, the second derivative is positive at the limit and tends to infinity. One can verify that another inflection point appears for a velocity gradient value of the order of 6.82 × 10
11 s
−1, using the parameters of
Figure 10. In practice, for this velocity gradient value, the turbulence has already appeared and the present modeling is no longer valid (see
Appendix B).
Until now, the experimental data analyzed corresponded to those for which the contact of the liquid with the surfaces could be considered as perfect (i.e., no slipping at the wall). Indeed, in the double cone the wall surfaces could be considered sufficiently hydrophilic (i.e., almost perfect wetting) and there is no free liquid surface. The data concerning the experiments with the simple cone and the Couette cell, on the contrary, involve free liquid surfaces as well as partial slipping at the walls. Therefore, as mentioned in
Section 2.2, in order to analyze these data, the elastic constant
K must be replaced by the effective elastic constant
in the various theoretical expressions. On the other hand, the intrinsic parameters that define the medium at equilibrium, such as the transition temperature
Tt, are not impacted by the coefficient
CK. Specifically, the value of exponent
v, which appears in all calculations, is not affected by this replacement.
Given the transformations of
K into a
Keff, the data in
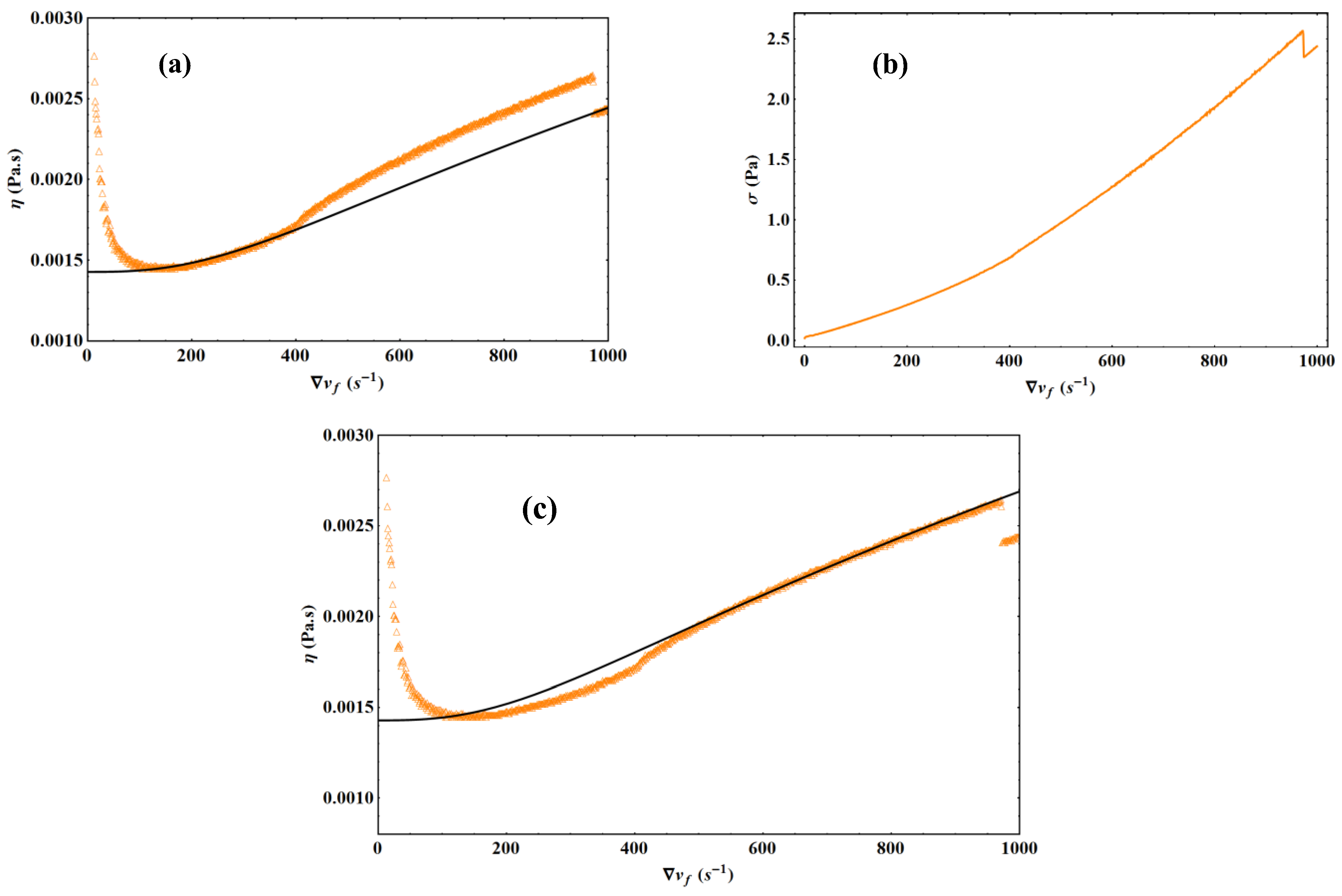
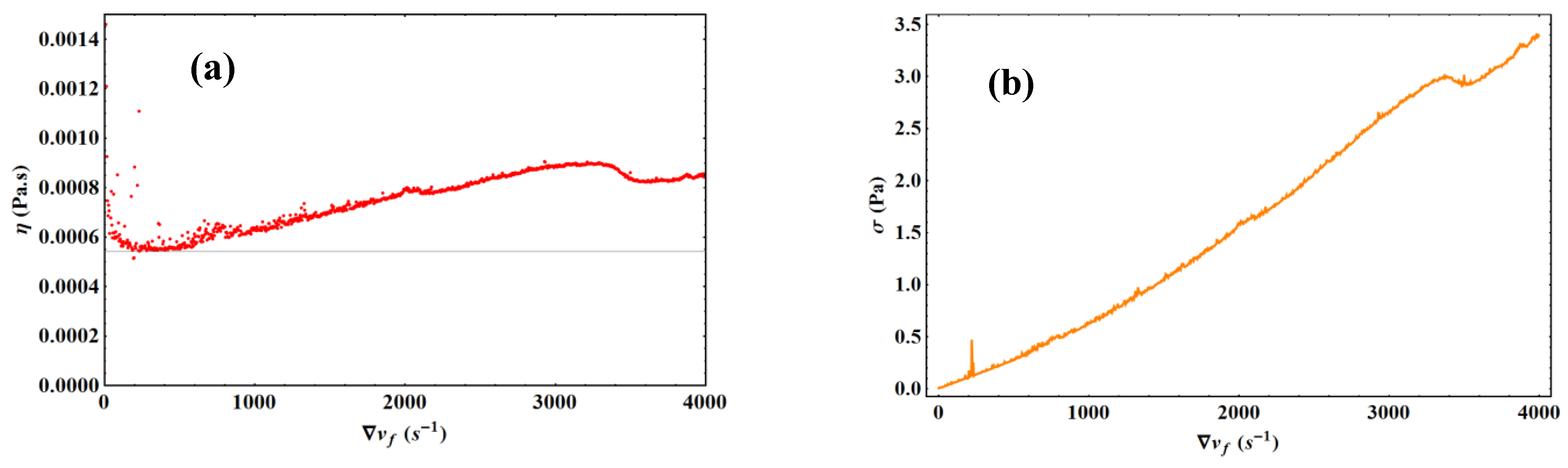
Figure 9 corresponding to the simple cone experiment can be analyzed similarly to those from the double cone experiments. First of all, it can be seen in
Figure 12a that the plateau corresponding to subregion 2 is strongly shifted in absolute value. Moreover, this plateau is rather narrow. The theoretical curve determined with Equation (19) shows that the beginning and the end of subregion 3 can be reproduced correctly, while the middle appears as a bump.
Figure 12b shows that the evolution of the viscosity is only a consequence of the stress variation. In this same figure, it can be seen that the stress has a significant change of evolution around 400 s
−1 and then suddenly returns to a “normal” behavior beyond 970 s
−1. If the bump is ignored for the moment, the theoretical curve requires that the parameter
dN be equal to the cone radius. This is perfectly consistent with what was found in ref. [
8] with the case of the plate-plate rheometer, which also contained a free surface. The presence of this free surface also has the effect of inducing wall slip, which is translated in the elastic mode theory by a decrease in the static shear elastic constant
K value. Indeed, the theoretical curve requires the decrease of
K by a coefficient
CK = 0.7655. This is also in perfect agreement with what has been shown in ref. [
8].
Let us now analyze the case of the bump in subregion 3. The bump appears because the stress is stronger than it should be, that is, the torque to drive the liquid is too strong. This suggests an “abnormally” strong slip. Indeed,
Figure 12c shows that this bump can be reproduced by changing only the value of the coefficient
CK, which must decrease until it reaches a value 1.49 times lower. The relatively sharp decrease of the viscosity during the stalls observed at high shear rate in the simple cone experiments can be interpreted as a reduction of the slip for certain values of the rate, phenomena probably related to the existence of a free surface for the liquid combined with the unavoidable vibrations associated with relatively high velocities of rotating mechanical systems.
The viscosity variation in
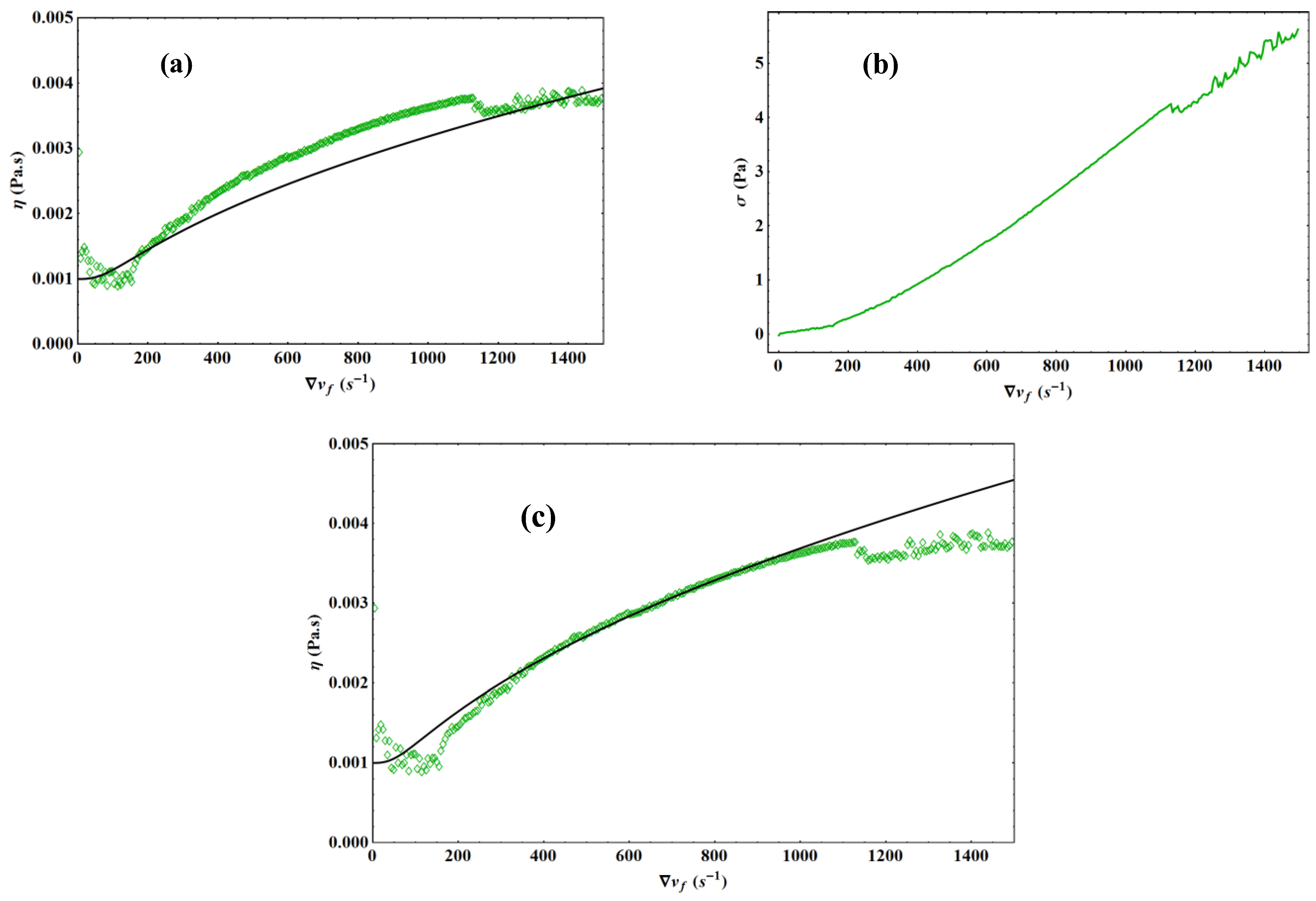
Figure 9 corresponding to the Couette cell experiment has the same qualitative behavior as the simple cone experiment. This behavior must therefore be explained in the same way. First of all, it can be observed in
Figure 13 that the data here are much less precise. It is interesting to note that the theoretical curve in
Figure 13a imposes a value of
dN corresponding to the height of water in the cell. In addition, a lower value of the static shear elastic constant
K must be introduced. This is in accordance with the fact that there is the presence of a free surface as in the simple cone experiment, which induces a slip, but it appears as an intensification of this slip because of the more hydrophobic material of the Couette cell compared to the stainless steel of the cone. The value of
CK is perfectly compatible with the results of Badmaev et al. (Ref. [
18]) to reproduce the values of the liquid water shear elastic modulus
G′ for low wettability of the contact surface (see the corresponding discussion in ref. [
8]).
As with the simple cone,
Figure 13b shows that the bump in subregion 3 is due to a significant change in stress variation between 155 s
−1 and 1130 s
−1. Again, this bump represents an “abnormally” strong slip.
Figure 13c shows that this bump can be reproduced by only decreasing the value of the coefficient
CK until it reaches a value 1.76 times lower. This analysis is therefore consistent with that of the simple cone experiment.
It may seem strange at first sight that the viscosity increases due to wall slip. However, this is only true in subregion 3, where the influence of the external disturbance can no longer be neglected. The explanation is as follows: a decrease in the value of K induces an increase in the parameter λ because of the decrease in the celerity (see Equation (17)) and the decrease in K in the expression of the liquid term of the viscosity , which is preponderant in the liquid phase and is more than compensated for by the decrease in , thus resulting in an increase in the ratio. In other words, the slip effect is largely compensated by the increasing influence of the external perturbation introduced in the term . Thus, the introduction of the parameter λ provides a clear physical explanation of the shear-thickening phenomenon despite the presence or absence of wall slip.
The analysis of subregion 3 allowed us to determine the parameters
dN and
CK in each experiment. The analysis was done in relative form using an empirical value of the viscosity
. To determine an absolute value of
, the value of the dissipative distance
d must be fixed. To be consistent, the analysis of subregion 1 should be described using the inertial mode theory presented in ref. [
8]. This theory introduces the notions of action temperature
TA, of viscous mass
(further details on this notion are given in
Appendix C) and of threshold stress
, where
represents the macroscopic static shear elastic modulus,
is the shear elastic modulus of the released gas and
ξ is the correlation length between the fluid basic units. The parameter
e represents a characteristic distance of the experimental set-up. In the case of the plane-plane rheometer with a small air gap
eg, it was shown in ref. [
8] that, for these conditions,
e =
d =
eg. It has been shown that
ξ is compatible with the value
ξ =
eg at zero strain (corresponding to a zero-action temperature) and then decreases when the strain increases until reaching the value
ξ0 corresponding to an action temperature consistent with the establishment of a Newtonian regime. Let us recall that
ξ0 is an intrinsic property of the fluid, which represents the distance over which the fluctuations of the unit cells are correlated in the bulk phase at thermodynamic equilibrium (see ref. [
7]).
Equation (28) of ref. [
8] allows us to define an effective viscosity
, which must tend towards the known viscosity of the fluid
when the action temperature
TA becomes sufficiently large in front of the reaction temperature
TA0 so that we can consider the flow regime as Newtonian. Thus, by definition, we write:
where
is determined by Equation (28) of ref. [
8]. By construction, Equation (23) is such that
tends to
when
TA >>
TA0 and
, where
represents the cut-off pulsation of the inertial modes. In the case of the experiment with the HAAKE viscometer or with the Couette cell,
EA(
X) is identified with the experimentally determined or imposed stress
σ and
with the maximum radial velocity. The parameter
represents the calibration constant that must be applied to
to compensate for the offset of the experimental data corresponding to the plateau of subregion 2.
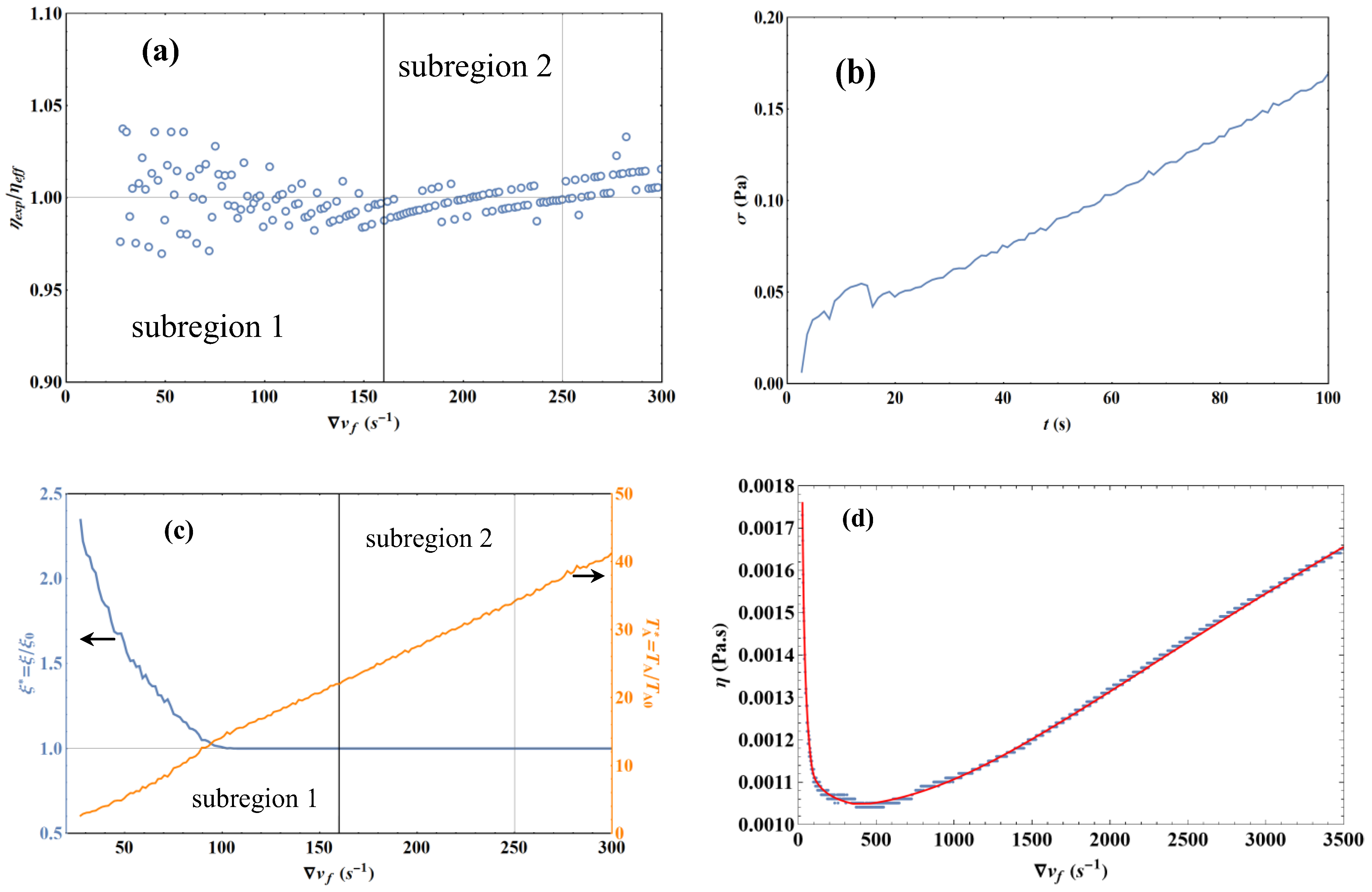
As for subregion 3, we will start by analyzing the double cone experiments. The numerical values of the parameters needed for the modeling are grouped in
Table 6.
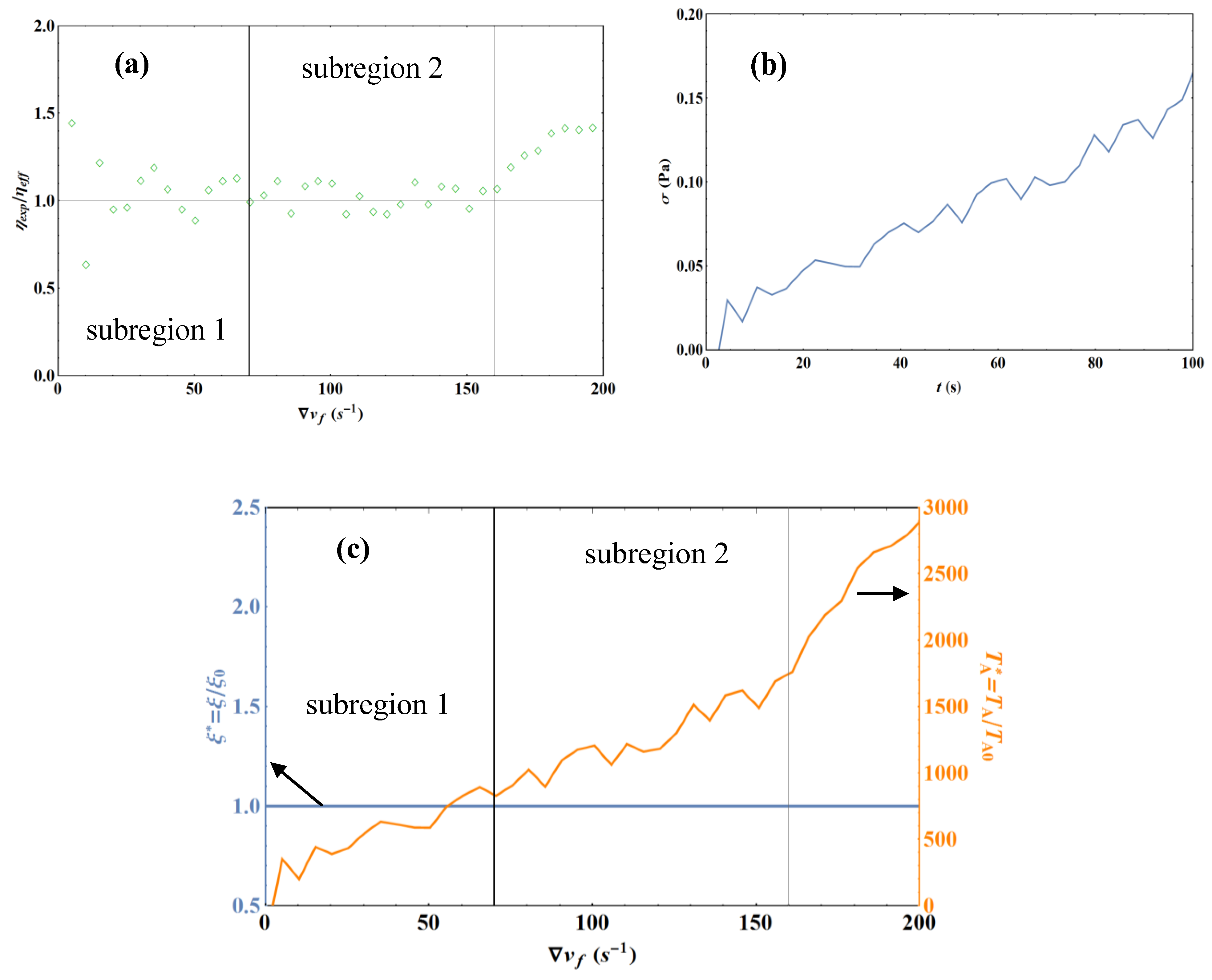
Figure 14a shows that Equation (23) reproduces the data with a well-centered deviation. The deviation in subregion 2 is less than ±2% in agreement with the accuracy of the measurements. In subregion 1, the deviation increases up to ±4%, but this deviation is only the result of the oscillations of the shear stress
σ. Indeed,
Figure 14b shows that the oscillations of
σ are strong at the beginning of the experiment until a time
t ~ 20 s. These oscillations are then reflected in the calculation of
in such a way that the value of the resulting deviation is consistent with these oscillations of
σ. Therefore, Equation (23) provides the best possible representation of the data.
Note that the parameters
d and
e fix the absolute values of viscosity, while
ξ allows the description of their variations in subregion 1. The values of these parameters are in accordance with what is expected for this type of experiment. Indeed, it is found that
d is slightly smaller than the “reference” value equal to 100 µm (see ref. [
7]). Similarly, it is found that
e is slightly higher than the liquid thickness at distance
R corresponding to the rotor radius for the bottom cone. Since the upper double cone must be considered, it is normal to find a value of the order of 1 mm.
Let us focus on the variations of the effective viscosity in subregion 1. These variations are determined by the variations of the correlation length
ξ. This is what was shown in ref. [
8] such that
ξ decreases as the strain increases. Similarly,
ξ should decrease when the strain rate increases. Given the boundary limits on
ξ previously mentioned, it turns out that this variation can be empirically described by the following general function:
where
σ1,
σ2,
ε1 and
ε2 are four empirical constants. It is immediately seen that Equation (24) has the correct boundary properties when
σ = 0 and
σ >>
σ1. We preferred here a description in terms of the shear stress
σ rather than in terms of strain rate, which allows us to have a single input parameter for the whole modeling. The evolution of the parameter
ξ is shown in
Figure 14c and we note that the variation is limited to subregion 1 at low strain rates. Therefore, as expected, the value of
ξ is equal to
ξ0 in subregion 2.
The knowledge of the parameter
ξ allows us then to represent the variation of the reduced action temperature
. It has been shown in ref. [
8] that the regime can be considered as Newtonian when
reaches values of the order of 100.
Figure 14c shows that
evolves between 25 and 35 in subregion 2. This mean that the liquid in this subregion 2 has not reached a perfectly Newtonian behavior and the measured viscosity has therefore not reached its Newtonian limit, although it is numerically very close to it.
Figure 14c also shows that the value
is exceeded very quickly, corresponding to very low strain rates (i.e., ~10 s
−1). Thus, the measurements made essentially correspond to a regime in which the medium behaves as a liquid.
Figure 14d shows that the combination of Equations (19), (23) and (24) allows a consistent quantitative representation of the experimental data for all subregions. It can be seen that the Newtonian plateau simply corresponds to a flat minimum in the measured effective viscosity.
Above, an example was presented where a linear strain ramp was imposed. We recall here that the results when imposing a linear stress ramp give exactly the same results and therefore lead to the same analysis.
As for subregion 3, analysis of the data from the simple cone and Couette cell experiments requires replacing in Equation (23) by the effective celerity as previously explained.
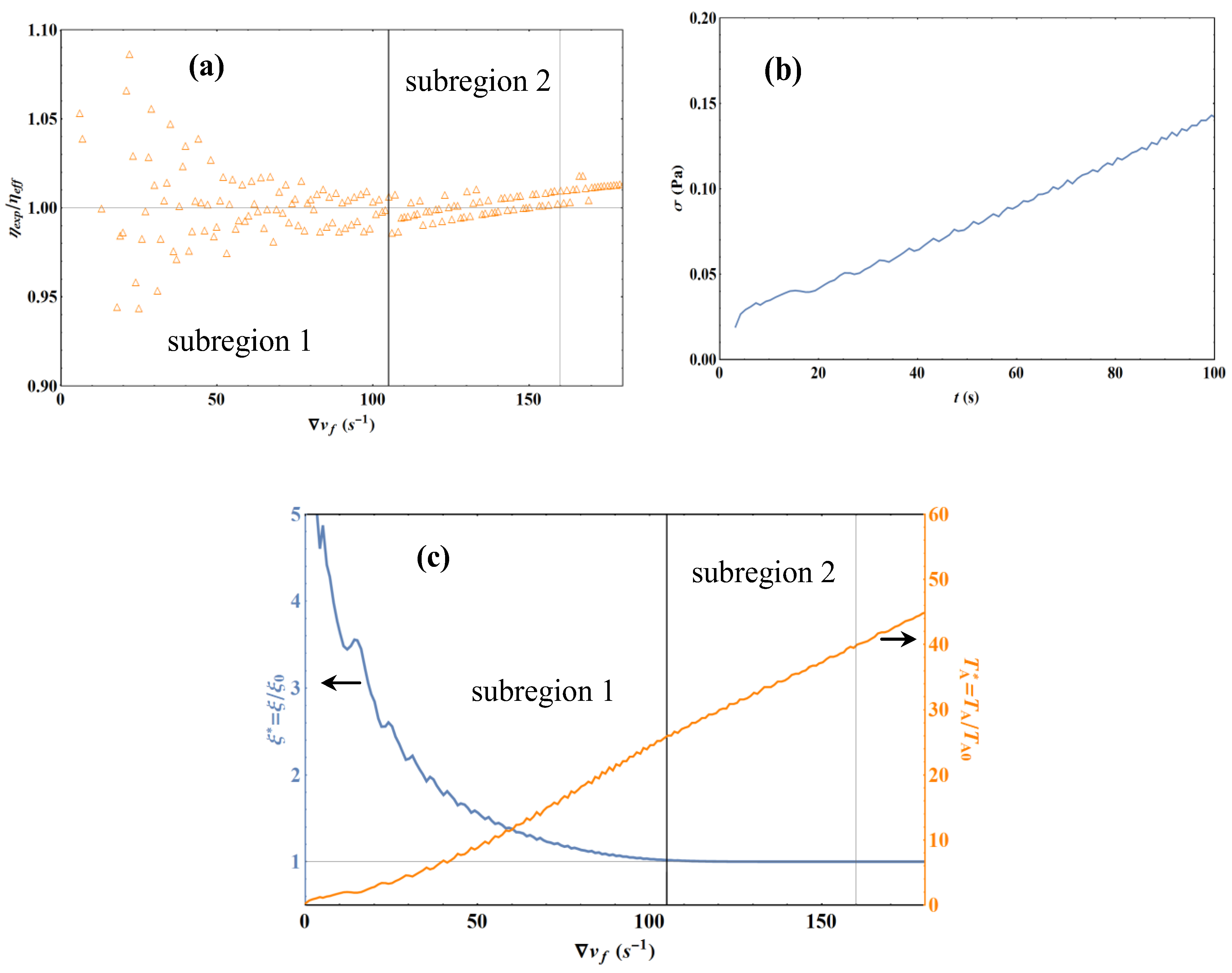
We will analyze the results of the simple cone experiments. The numerical values of the parameters needed for the modeling are grouped in
Table 7. It is observed that the decrease of the shear elastic constant
K leads to a strong decrease of the equilibrium macroscopic parameter
.
Although the parameters have significantly different numerical values compared to those of the double cone experiment,
Figure 15 shows that the analysis of the experiments with the simple cone is very similar to that of the double cone, except that there is more noise in the determination of
, which is reflected in the calculation of
. An interesting difference lies in the numerical value of the parameter
e, which is much closer to the liquid thickness at distance
R corresponding to the rotor radius for the bottom cone. This result is consistent with what is expected since, for these experiments, the liquid height exceeds the thickness at distance
R corresponding to the rotor radius for the bottom cone by only 1 mm. The other difference that can be observed is that subregion 2 is shifted to lower values of the velocity gradient, but we still have
ξ =
ξ0. This is consistent with the fact that
takes a higher value for the same velocity gradient in the simple cone experiments than with the double cone. It is observed that the medium reaches the same liquid-like regime in subregion 2 with
values between 25 and 40.
The experiments with the Couette cell lead to a very strong decrease of the effective elastic constant of the medium, which leads to a rather strong decrease of most of the parameters, as can be seen in
Table 8. Thus, it is now the elastic constant of the released gas that dominates, whereas the value of
Kgas was negligible in the experiment with the double cone and about three times lower in the experiment with the simple cone. This shows the importance of taking into account the gas released during the shear action.
Figure 16 shows that the results obtained with the Couette cell are quite similar to those obtained with the simple cone, which is consistent with the fact that these two experiments have in common the existence of a free surface. The deviation obtained in
Figure 16a is quite high, but consistent with the strong oscillations of the curve
, as can be seen in
Figure 16b. The deviation, being well centered, shows that Equation (23) allows the reproduction of the data as well as possible.
The major difference is that, from the first recorded points, we have
ξ =
ξ0. This very fast variation of
ξ is consistent with the fact that very large values of
are quickly obtained, as can be seen in
Figure 16c. This also explains that subregion 2 is reached for lower values of the velocity gradient than in the previous experiments. The decrease of the effective viscosity in subregion 1 when the strain rate increases is no longer related to the evolution of
ξ, but corresponds to the transient regime. Indeed, in the experiments with the HAAKE viscometer, the characteristic time
of this transient regime is of the order of 0.1 s, i.e., the first experimental point recorded already corresponds to at least 10
. On the other hand, in the experiments with the Couette cell, the characteristic time
is of the order of 10 s. Subregion 2 is reached after a time of about 4
. Although the medium transits very quickly to a Newtonian liquid-like regime, there is still a time needed for the steady state to set in and, thus, for subregion 2 to be established. This transient regime was “hidden” by its very short duration in the HAAKE experiments.
It is also important to note that the value of e is, here, exactly equal to the value of the Couette cell air gap, which is perfectly consistent with what is expected for this type of experiment.
The set of experiments described in this section has allowed a wide range of parameter space to be explored, thus allowing a thorough test of the theoretical model. The experimental results shown in
Figure 9 find a unique theoretical framework, which allows us to account for them and provides a coherent physical interpretation.
To conclude this section,
Figure 17 presents an example of results obtained with liquid n-octane. The strong resemblance with the results obtained with water suggests that the present model applies to all liquids, probably in their whole phase diagram. This is also in substance what Heyes (Ref. [
5]) wrote in his conclusion:
“It was discovered here that simple liquids (e.g., argon, chlorine and water) behave rheologically [i.e., they should shear thin and shear thicken] in much the same way as these more chemically complicated fluid mixtures [e.g., mineral oil, polysaccharide xanthan gum]”.
Figure 17.
Liquid n-octane experiment at atmospheric pressure and
T = 293.15 K with the HAAKE simple cone by imposing a linear strain ramp. (
a) Viscosity variation as a function of velocity gradient. The black horizontal line represents the expected viscosity value according to ref. [
19]. (
b) Stress variation as a function of velocity gradient.
Figure 17.
Liquid n-octane experiment at atmospheric pressure and
T = 293.15 K with the HAAKE simple cone by imposing a linear strain ramp. (
a) Viscosity variation as a function of velocity gradient. The black horizontal line represents the expected viscosity value according to ref. [
19]. (
b) Stress variation as a function of velocity gradient.




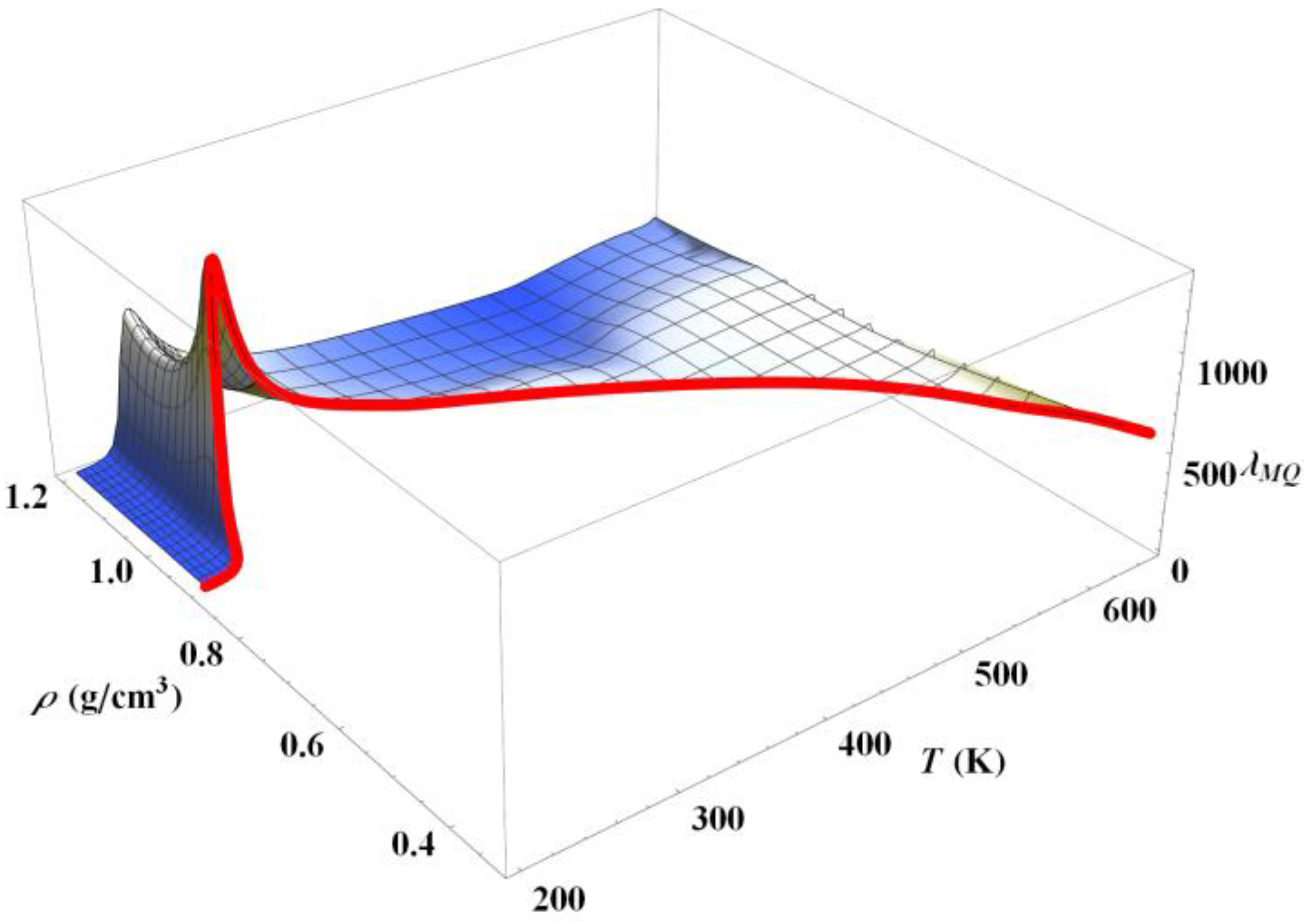
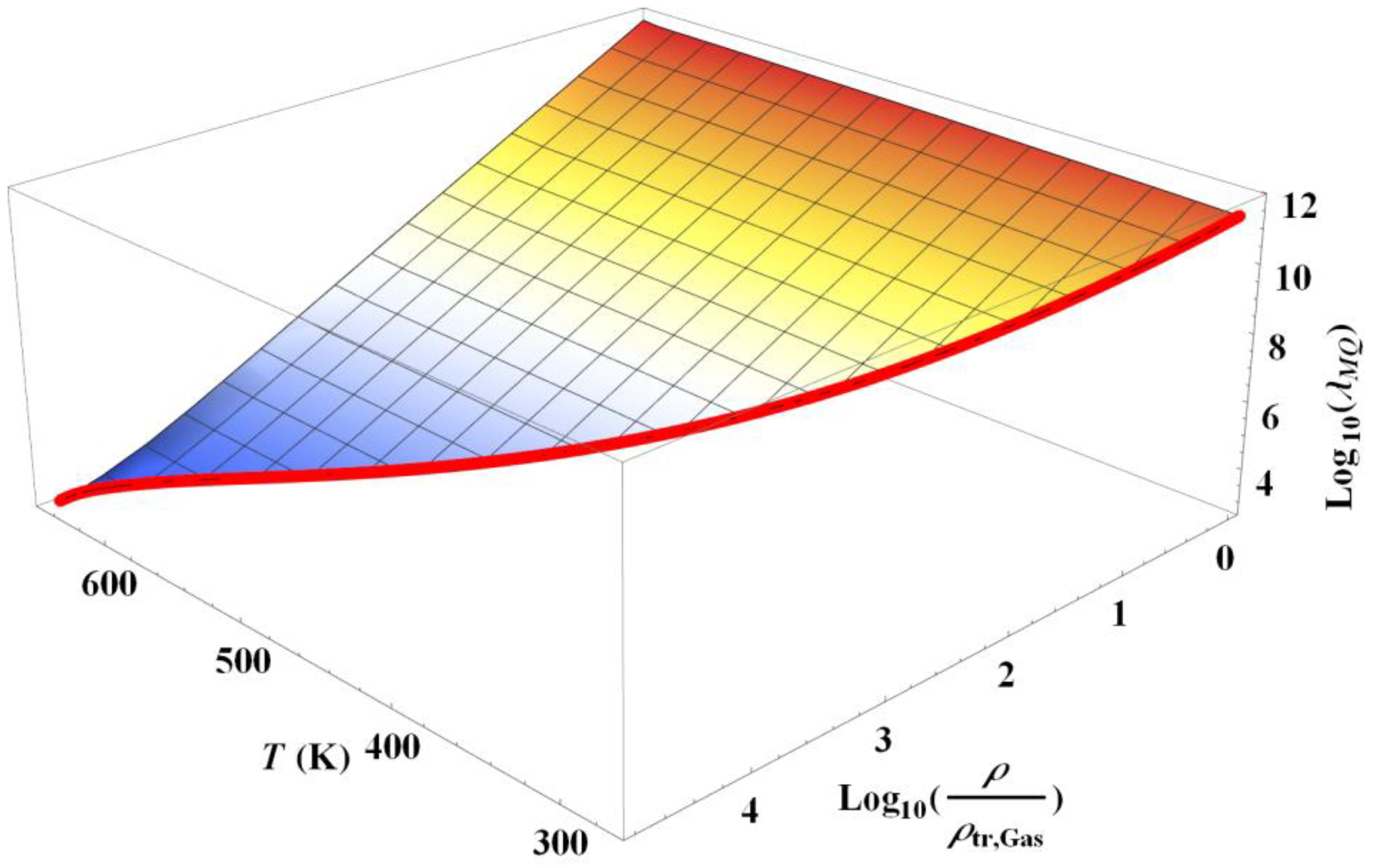
 where m represents the mass of an atom (or of a molecule), which is related to the Compton wave-vector (c being the celerity of light and the reduced Planck constant) associated with this atom (or molecule), the following expression can be deduced:
where m represents the mass of an atom (or of a molecule), which is related to the Compton wave-vector (c being the celerity of light and the reduced Planck constant) associated with this atom (or molecule), the following expression can be deduced: is a dimensionless coefficient that depends only on temperature and density of the medium. The parameters and are the elastic mode cut-off wavelength and Compton wavelength, respectively. The quantity represents a characteristic distance, whose physical meaning will be discussed in a future paper.
is a dimensionless coefficient that depends only on temperature and density of the medium. The parameters and are the elastic mode cut-off wavelength and Compton wavelength, respectively. The quantity represents a characteristic distance, whose physical meaning will be discussed in a future paper.


 is the volume per basic unit. The numerator in Equation (A6) thus represents the average energy dissipated in the basic unit volume during the time τ. At the turbulent transition, the average dissipated energy per basic unit is then simply written as , which recalls a famous formula of special relativity.
is the volume per basic unit. The numerator in Equation (A6) thus represents the average energy dissipated in the basic unit volume during the time τ. At the turbulent transition, the average dissipated energy per basic unit is then simply written as , which recalls a famous formula of special relativity.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}