Frequency Transient Suppression in Hybrid Electric Ship Power Systems: A Model Predictive Control Strategy for Converter Control with Energy Storage


Abstract
:1. Introduction
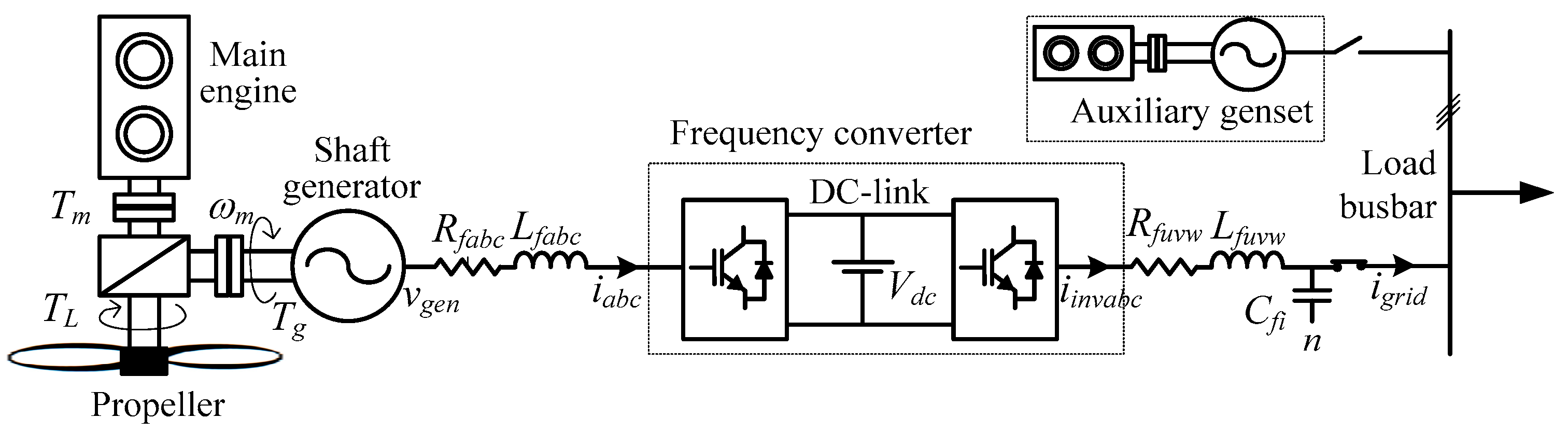
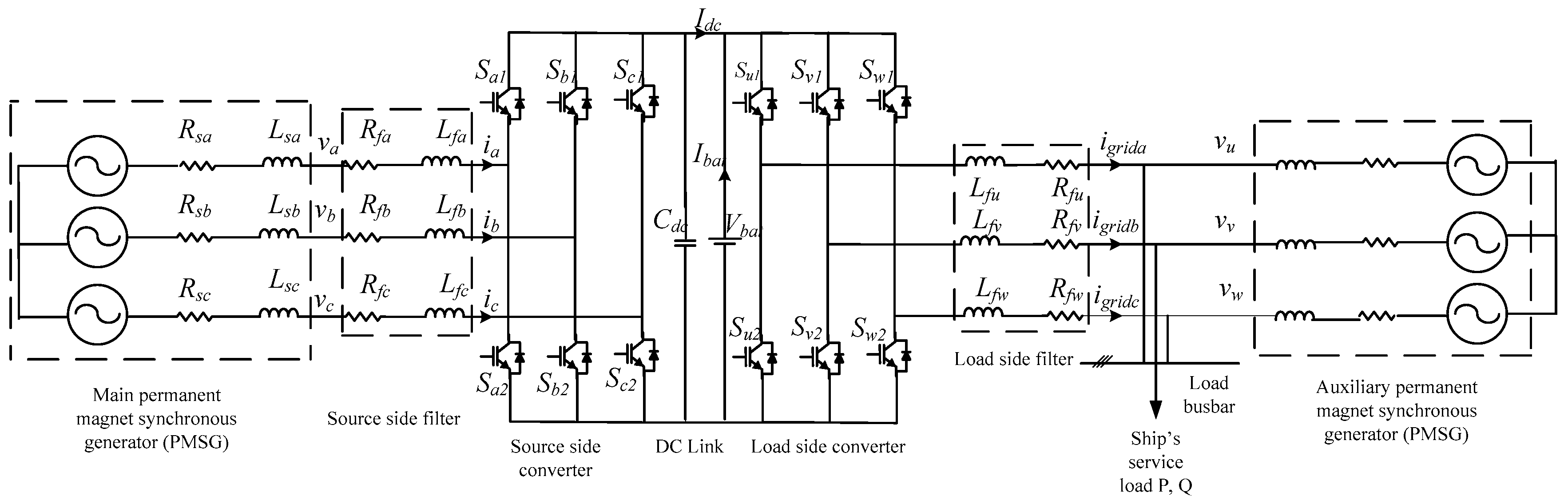
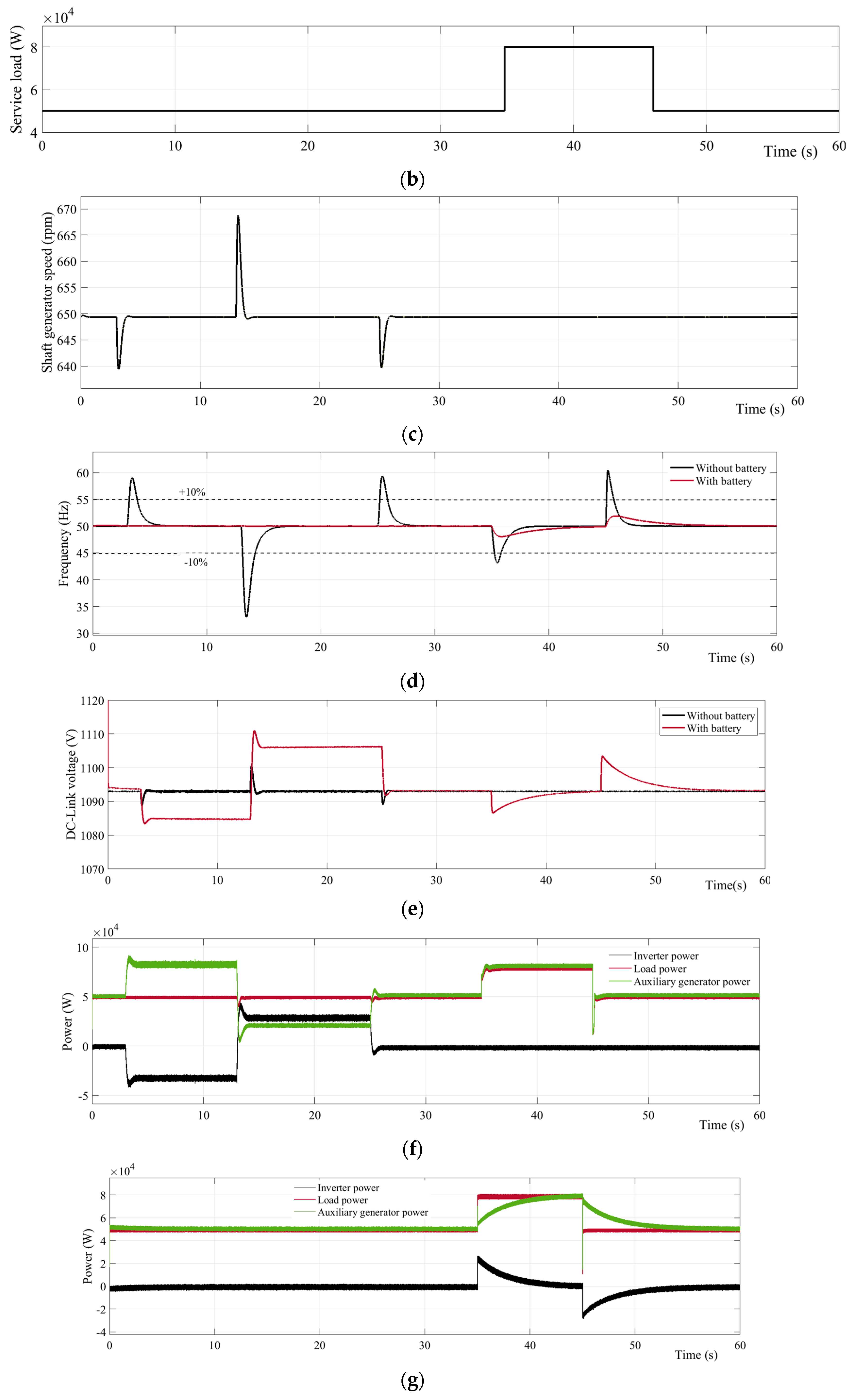
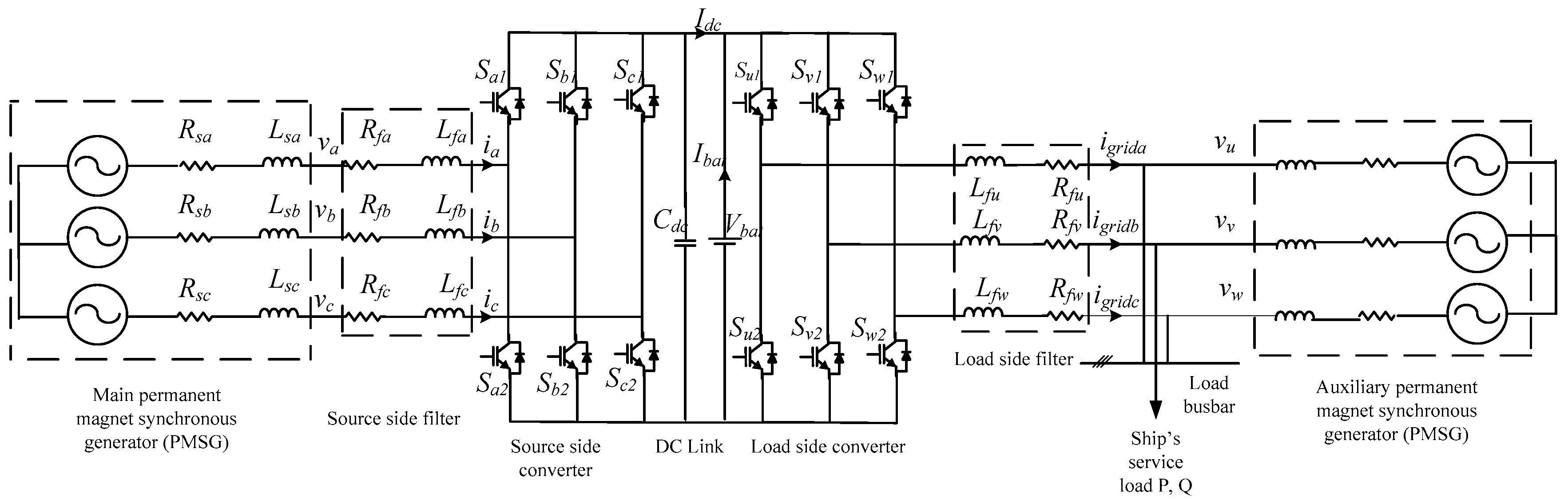
2. Hybrid Shipboard Power System Modelling and Operation
3. Proposed MPC Strategy
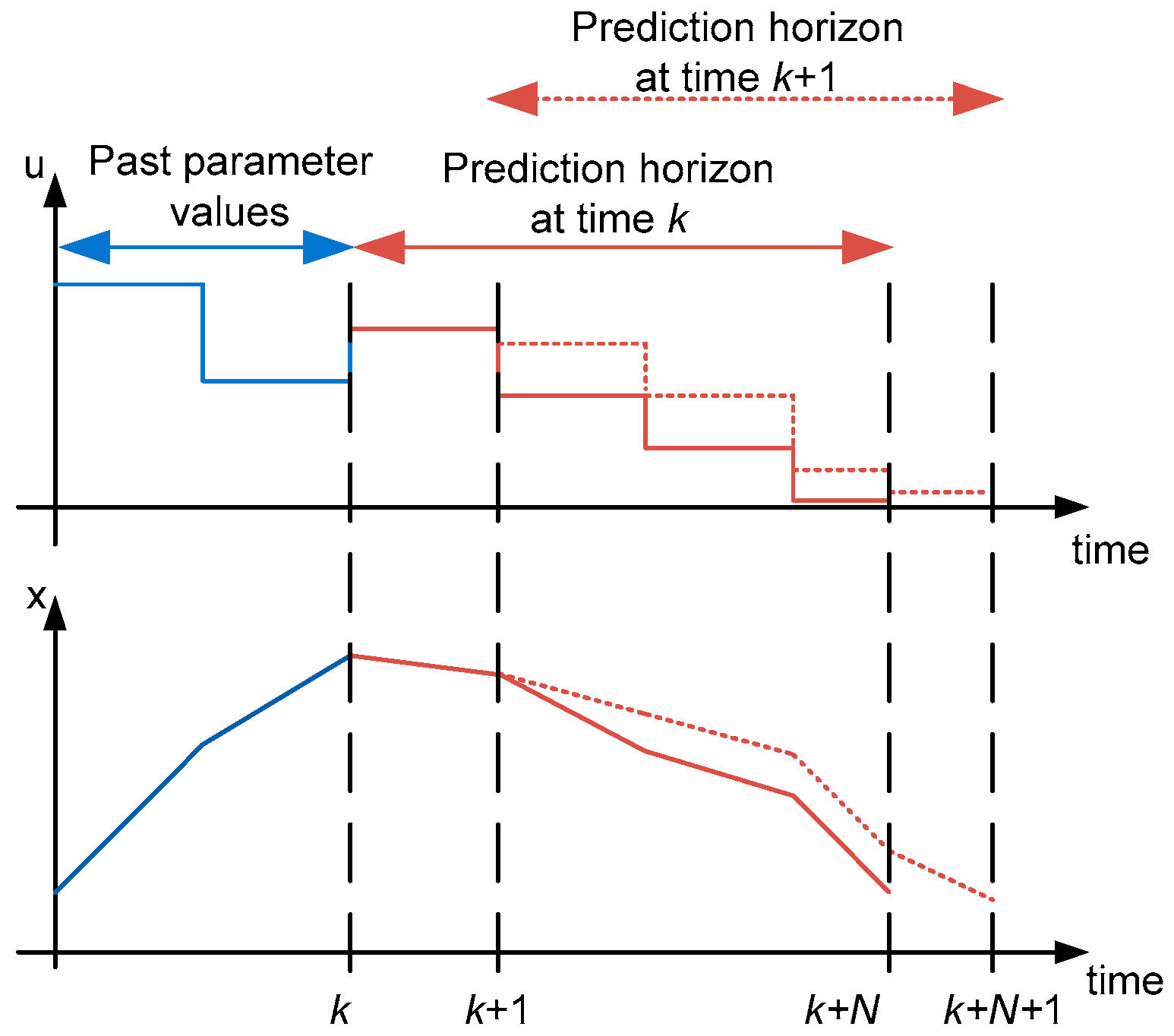
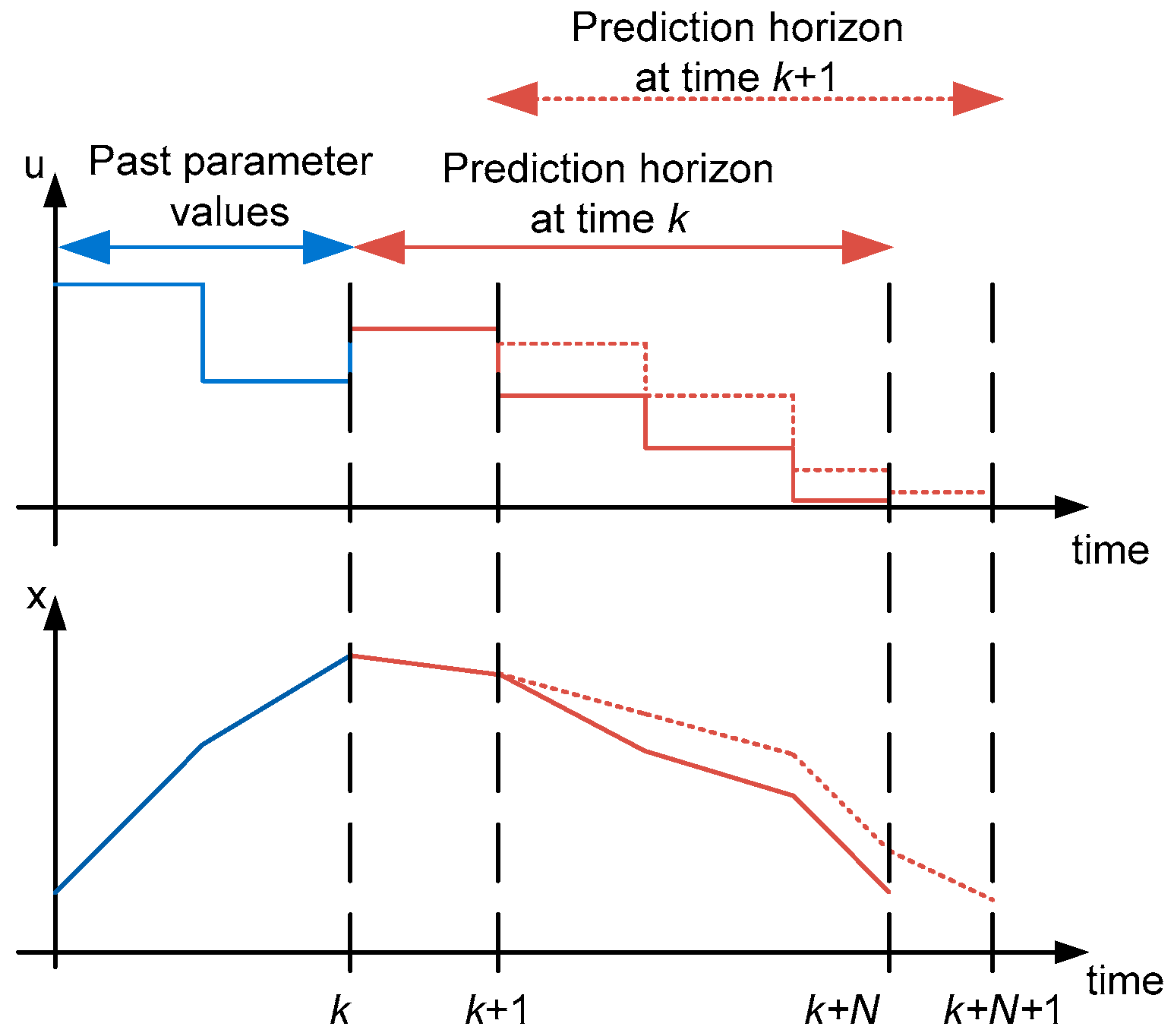
3.1. The MPC Concept
3.2. MPC Implementation in the Hybrid Shipboard Power System
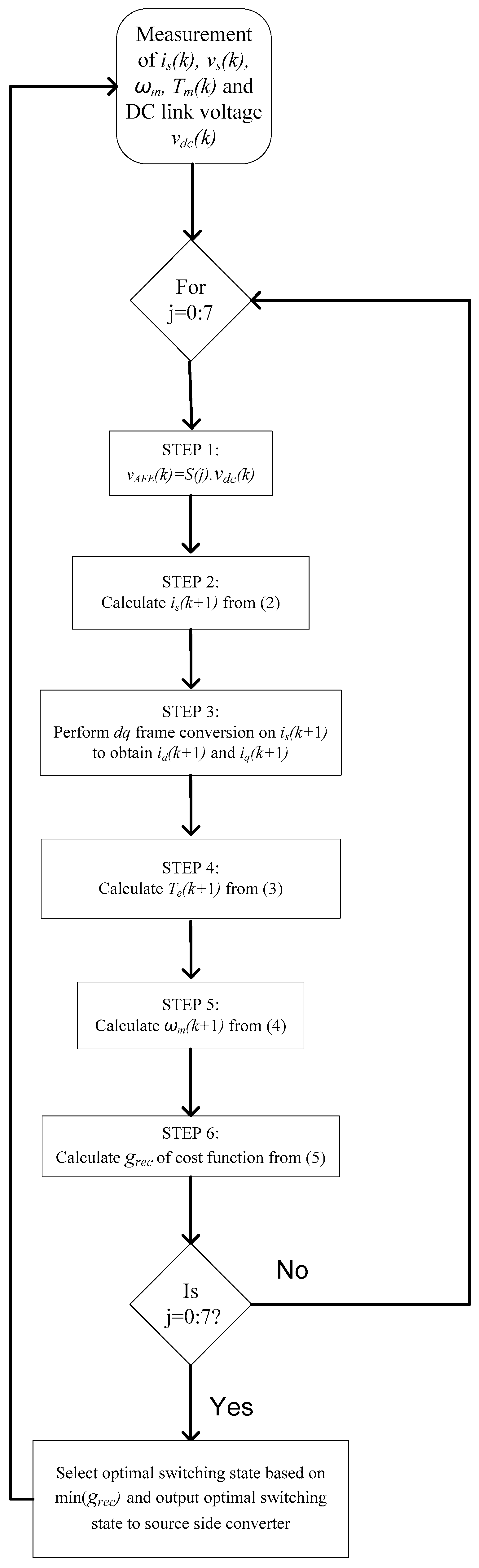
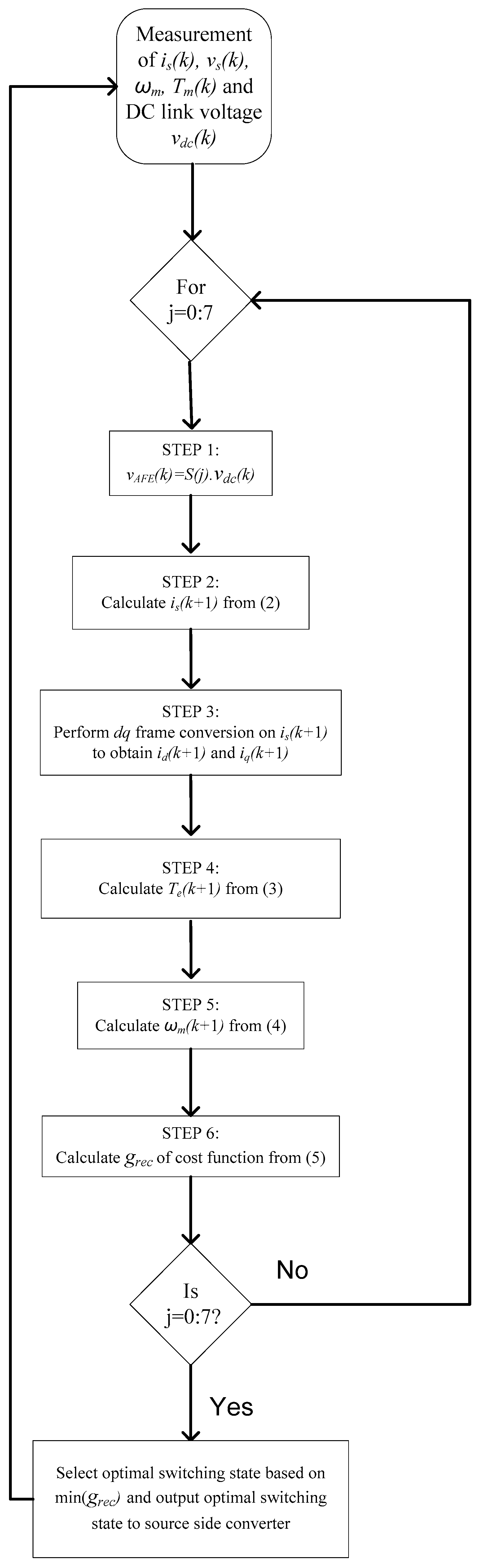
3.2.1. Source Side Converter Modelling with the MPC Strategy
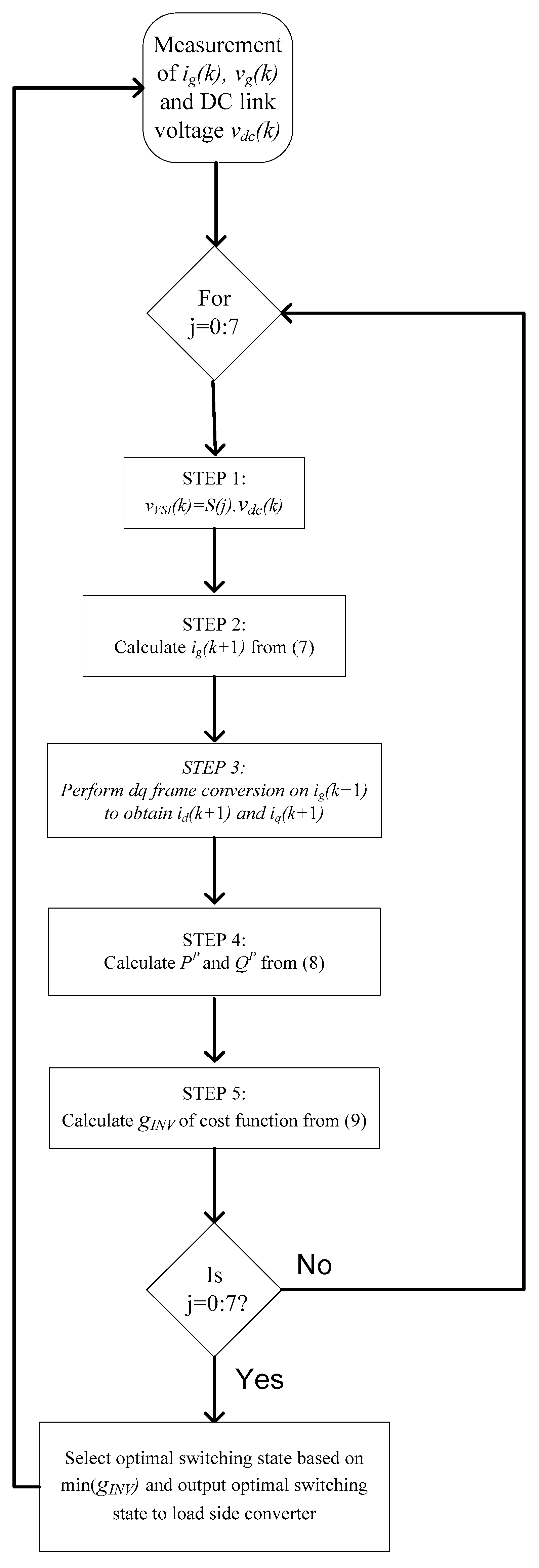
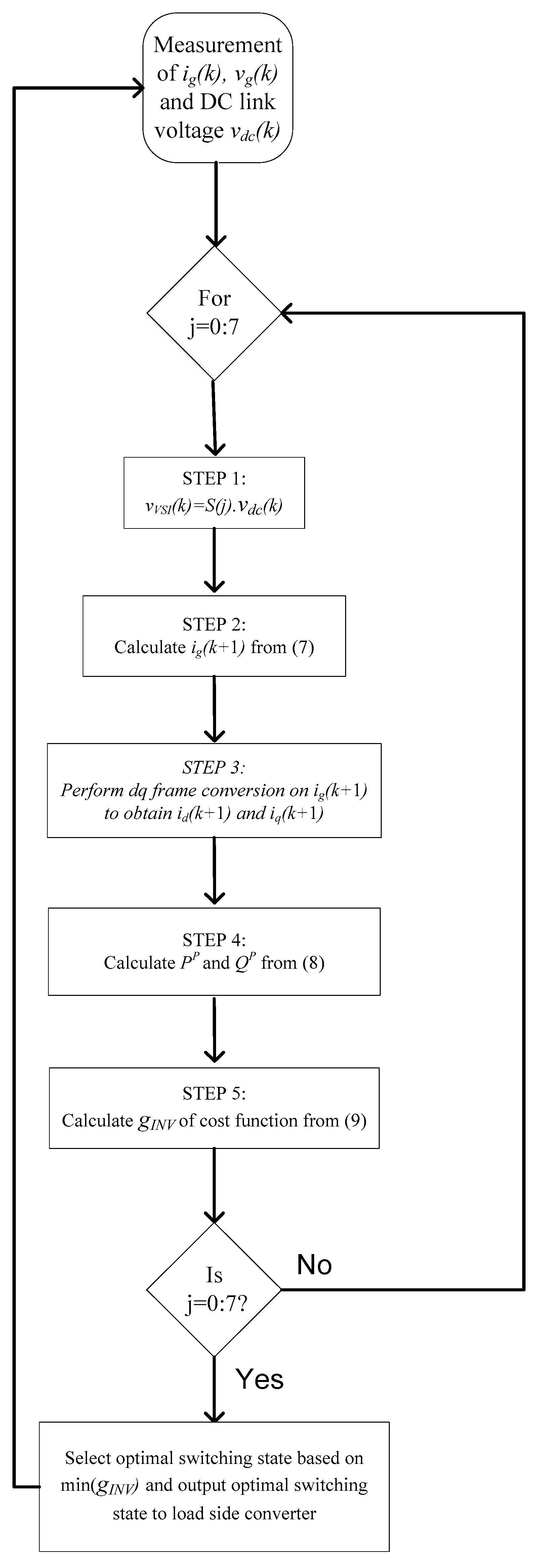
3.2.2. Grid (Load) Side Converter Modelling with MPC Strategy
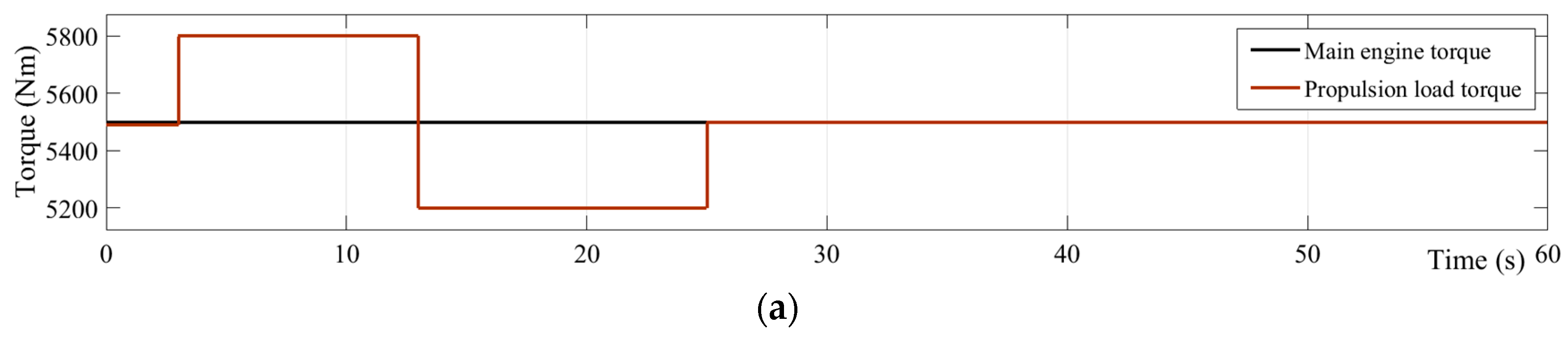
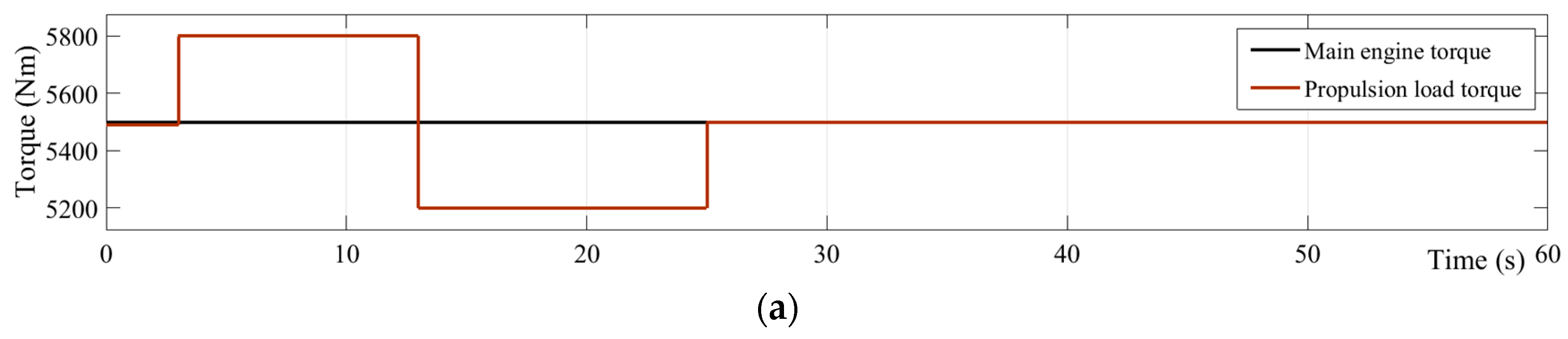
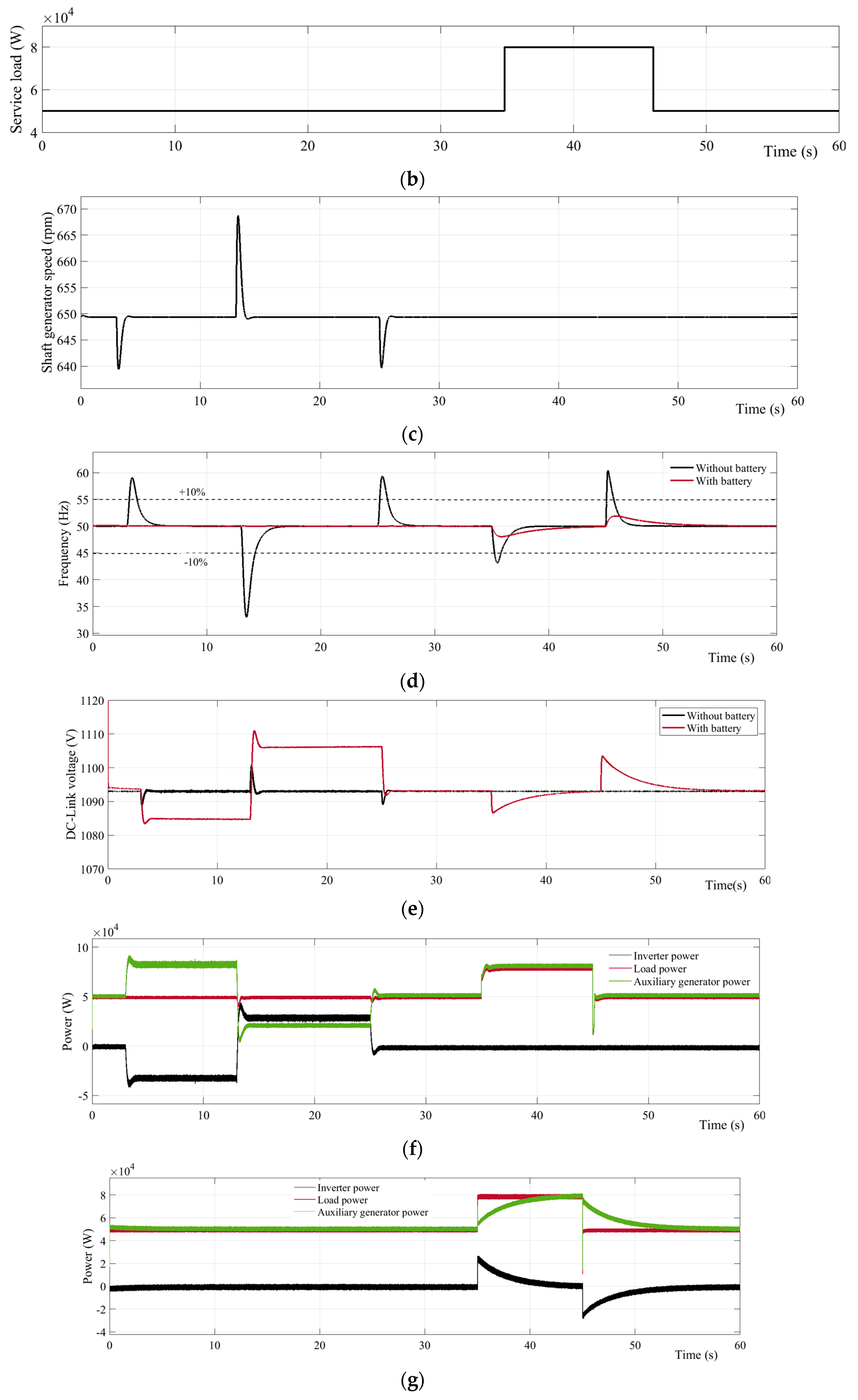
4. Simulation Results
5. Discussion of Results
6. Conclusions
Author Contributions
Conflicts of Interest
References
- McCoy, T.J. Electric Ships Past, Present, and Future [Technology Leaders]. IEEE Electr. Mag. 2015, 3, 4–11. [Google Scholar] [CrossRef]
- Dale, S.J.; Hebner, R.E.; Sulligoi, G. Electric Ship Technologies. Proc. IEEE 2015, 103, 2225–2228. [Google Scholar] [CrossRef]
- Kim, S.O.; Ock, Y.B.; Heo, J.K.; Park, J.C.; Shin, H.S.; Lee, S.K. CFD simulation of added resistance of ships in head sea for estimating energy efficiency design index. In Proceedings of the OCEANS 2014–TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–5, 7–10. [Google Scholar]
- Tetra Tech Inc. Use of Shore Side Power for Ocean Going Vessels; American Association of Port Authorities: Alexandria, VA, USA, 2007; Available online: http://wpci.iaphworldports.org/data/docs/onshorepower-supply/library/1264151248_2007aapauseofshore-sidepowerforocean-goingvessels.pdf (accessed on 1 July 2017).
- Kundur, P. Power System Stability and Control, 1st ed.; McGraw Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
- Nielson, B.O. 8500 TEU Container Ship Concept Study; Project: 4-4383; Odense Steel Shipyard Ltd.: Munkebo, Denmark, 2009. [Google Scholar]
- Hall, T.D. Practical Marine Electrical Knowledge, 2nd ed.; Witherby Publishers: Livingston, UK, 1999; p. 2. [Google Scholar]
- Zarghami, M.; Vaziri, M.Y.; Rahimi, A.; Vadhva, S. Applications of Battery Storage to Improve Performance of Distribution Systems. In Proceedings of the 2013 IEEE Green Technologies Conference (GreenTech), Denver, CO, USA, 4–5 April 2013; pp. 345–350. [Google Scholar]
- Ceballos, S.; Rea, J.; Robles, E.; Lopez, I.; Pou, J.; O’Sullivan, D.L. Control strategies for combining local energy storage with wells turbine oscillating water column devices. Renew. Energy 2015, 83, 1097–1107. [Google Scholar] [CrossRef]
- Vilathgamuwa, M.; Nayanasiri, D.; Gamini, S. Power Electronics for Photovoltaic Power Systems; Hudgins, J., Ed.; Morgan & Claypool Publishers: San Rafael, CA, USA, 2015. [Google Scholar]
- Rajapakse, G.; Jayasinghe, S.; Fleming, A.; Negnevitsky, M. A Model Predictive Control-Based Power Converter System for Oscillating Water Column Wave Energy Converters. Energies 2017, 10, 1631. [Google Scholar] [CrossRef]
- Tedeschi, E.; Carraro, M.; Molinas, M.; Mattavelli, P. Effect of Control Strategies and Power Take-Off Efficiency on the Power Capture from Sea Waves. IEEE Trans. Energy Convers. 2011, 26, 1088–1098. [Google Scholar]
- Mercier, P.; Cherkaoui, R.; Oudalov, A. Optimizing a Battery Energy Storage System for Frequency Control Application in an Isolated Power System. IEEE Trans. Power Syst. 2009, 24, 1469–1477. [Google Scholar]
- Urtasun, A.; Barrios, E.L.; Sanchis, P.; Marroyo, L. Frequency-Based Energy-Management Strategy for Stand-Alone Systems with Distributed Battery Storage. IEEE Trans. Power Electron. 2015, 30, 4794–4808. [Google Scholar]
- Wenjie, C.; Ådnanses, A.K.; Hansen, J.F.; Lindtjørn, J.O.; Tang, T. Super-capacitors based hybrid converter in marine electric propulsion system. In Proceedings of the 2010 XIX International Conference Electrical Machines (ICEM), Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for MicroGrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar]
- Hou, J.; Sun, J.; Hofmann, H. Interaction analysis and integrated control of hybrid energy storage and generator control system for electric ship propulsion. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 4988–4993. [Google Scholar]
- Hou, J.; Sun, J.; Hofmann, H. Mitigating power fluctuations in electrical ship propulsion using model predictive control with hybrid energy storage system. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4366–4371. [Google Scholar]
- Zhang, J.; Li, Q.; Cong, W.; Zhang, L. Restraining integrated electric propulsion system power fluctuation using hybrid energy storage system. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 336–340. [Google Scholar]
- Mufti, M.D.; Iqbal, S.J.; Lone, S.A.; Ain, Q.U. Supervisory Adaptive Predictive Control Scheme for Supercapacitor Energy Storage System. IEEE Syst. J. 2015, 9, 1020–1030. [Google Scholar]
- Shagar, V.; Jayasinghe, S.G.; Enshaei, H. Effect of Load Changes on Hybrid Shipboard Power Systems and Energy Storage as a Potential Solution: A Review. Inventions 2017, 2, 21. [Google Scholar]
- Shagar, V.; Gamini, S.; Enshaei, H. Effect of load changes on hybrid electric ship power systems. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–5. [Google Scholar]
- MatLab Demo: Excitation System. Available online: https://au.mathworks.com/help/physmod/sps/powersys/ref/excitationsystem.html?requestedDomain=true (accessed on 26 December 2017).
- Saadat, H. Power System Analysis, 2nd ed.; McGraw-Hill Education: London, UK, 2004. [Google Scholar]
- Kim, J.; Suharto, Y.; Daim, T.U. Evaluation of Electrical Energy Storage (EES) technologies for renewable energy: A case from the US Pacific Northwest. J. Energy Storage 2017, 11, 25–54. [Google Scholar]
- Farhadi, M.; Mohammed, O. Energy Storage Technologies for High-Power Applications. IEEE Trans. Ind. Appl. 2016, 52, 1953–1961. [Google Scholar]
- Ma, T.; Cintuglu, M.H.; Mohammed, O. Control of hybrid AC/DC microgrid involving energy storage, renewable energy and pulsed loads. In Proceedings of the 2015 IEEE Industry Applications Society Annual Meeting, Addison, TX, USA, 18–22 October 2015; pp. 1–8. [Google Scholar]
- Morstyn, T.; Hredzak, B.; Aguilera, R.P.; Agelidis, V.G. Model Predictive Control for Distributed Microgrid Battery Energy Storage Systems. IEEE Trans. Control Syst. Technol. 2017, 1–8. [Google Scholar] [CrossRef]
- Thirugnanam, K.; Joy, E.R.T.P.; Singh, M.; Kumar, P. Mathematical Modeling of Li-Ion Battery Using Genetic Algorithm Approach for V2G Applications. IEEE Trans. Energy Convers. 2014, 29, 332–343. [Google Scholar]
- Rahmoun, A.; Biechl, H. Modelling of Li-ion batteries using equivalent circuit diagrams. Przegląd Elektrotechniczny 2012, 88, 152–156. [Google Scholar]
- Shaosheng, F.; Yaonan, W. Fuzzy model predictive control for alternating current excitation generators. In Proceedings of the 4th International Power Electronics and Motion Control Conference (IPEMC 2004), Xi’an, China, 14–16 August 2004; Volume 2, pp. 676–680. [Google Scholar]
- Cannon, M. Model Predictive Control. University of Oxford, Hilary Term. 2016. Available online: http://www.eng.ox.ac.uk/~conmrc/mpc/mpc_lec1.pdf (accessed on 26 December 2017).
- Cannon, M.; Kouvaritakis, B. Model Predictive Control—Classical, Robust and Stochastic; Springer: New York, NY, USA, 2016. [Google Scholar]
- Maciejowski, J.M. Predictive Control with Constraints; Pearson Education: London, UK, 2000. [Google Scholar]
- Rajapakse, G.; Jayasinghe, S.G.; Fleming, A.; Shahnia, F. Model Predictive Control-based Power take-off Control of an Oscillating Water Column Wave Energy Conversion System. In Proceedings of the 2017 International Conference on Substantial Energy Engineering (ICSEE 2017), Perth, Australia, 12–14 June 2017. [Google Scholar]
- Rodriguez, J.; Cortés, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons Ltd.: Chichester, UK, 2012. [Google Scholar]
- Parvez, M.; Tan, N.M.L.; Akagi, H. An Improved Active-Front-End Rectifier Using Model Predictive Control. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 122–127. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Bus voltage | 400 V |
| Main engine active power capacity | 440 kW |
| Main engine set point power capacity | 374 kW |
| Auxiliary genset active power capacity | 88 kW |
| Frequency | 50 Hz |
| Main engine reference speed | 68 rad/s |
| Auxiliary engine reference speed (4 pole) | 78.5 rad/s |
| Parameters | Value |
|---|---|
| Nominal voltage | 1000 V |
| Fully charged voltage | 1048 V |
| Rated capacity | 832 Ah |
| Maximum capacity | 1000 Ah |
| Capacity at nominal voltage | 1050 Ah |
| Initial state of charge | 65% |
| Nominal discharge current | 361 A |
| Cut-off voltage | 800 V |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shagar, V.; Jayasinghe, S.G.; Enshaei, H. Frequency Transient Suppression in Hybrid Electric Ship Power Systems: A Model Predictive Control Strategy for Converter Control with Energy Storage. Inventions 2018, 3, 13. https://doi.org/10.3390/inventions3010013
Shagar V, Jayasinghe SG, Enshaei H. Frequency Transient Suppression in Hybrid Electric Ship Power Systems: A Model Predictive Control Strategy for Converter Control with Energy Storage. Inventions. 2018; 3(1):13. https://doi.org/10.3390/inventions3010013
Chicago/Turabian StyleShagar, Viknash, Shantha Gamini Jayasinghe, and Hossein Enshaei. 2018. "Frequency Transient Suppression in Hybrid Electric Ship Power Systems: A Model Predictive Control Strategy for Converter Control with Energy Storage" Inventions 3, no. 1: 13. https://doi.org/10.3390/inventions3010013
APA StyleShagar, V., Jayasinghe, S. G., & Enshaei, H. (2018). Frequency Transient Suppression in Hybrid Electric Ship Power Systems: A Model Predictive Control Strategy for Converter Control with Energy Storage. Inventions, 3(1), 13. https://doi.org/10.3390/inventions3010013