

Brain–Computer-Interface-Based Smart-Home Interface by Leveraging Motor Imagery Signals
 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
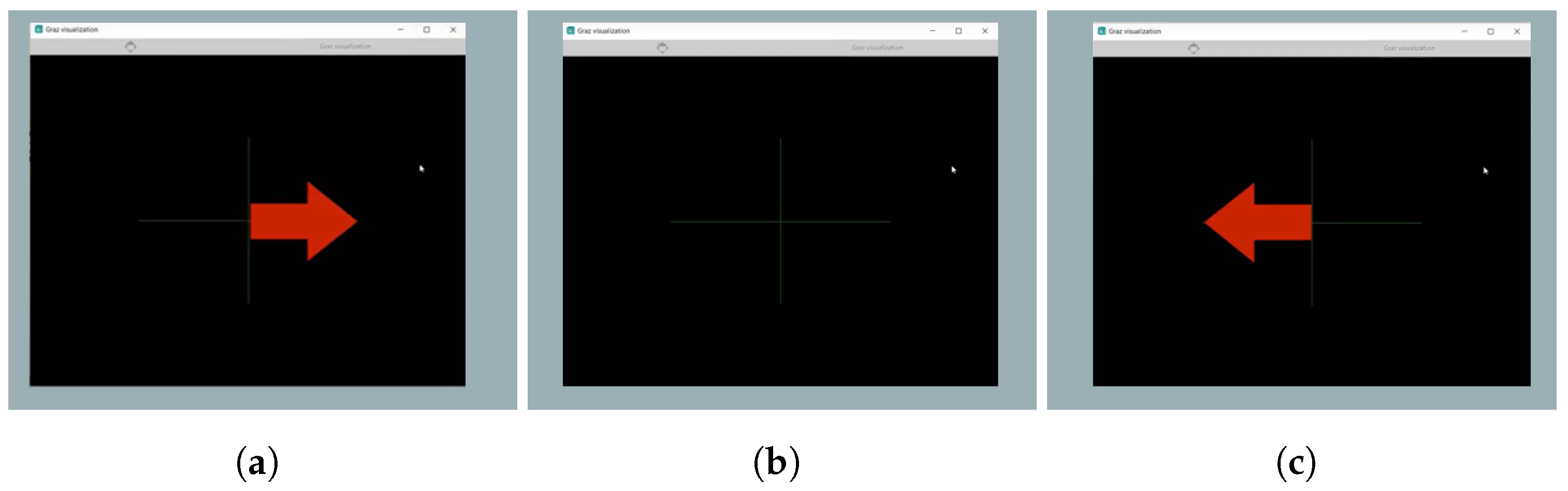
2.2. Experiments
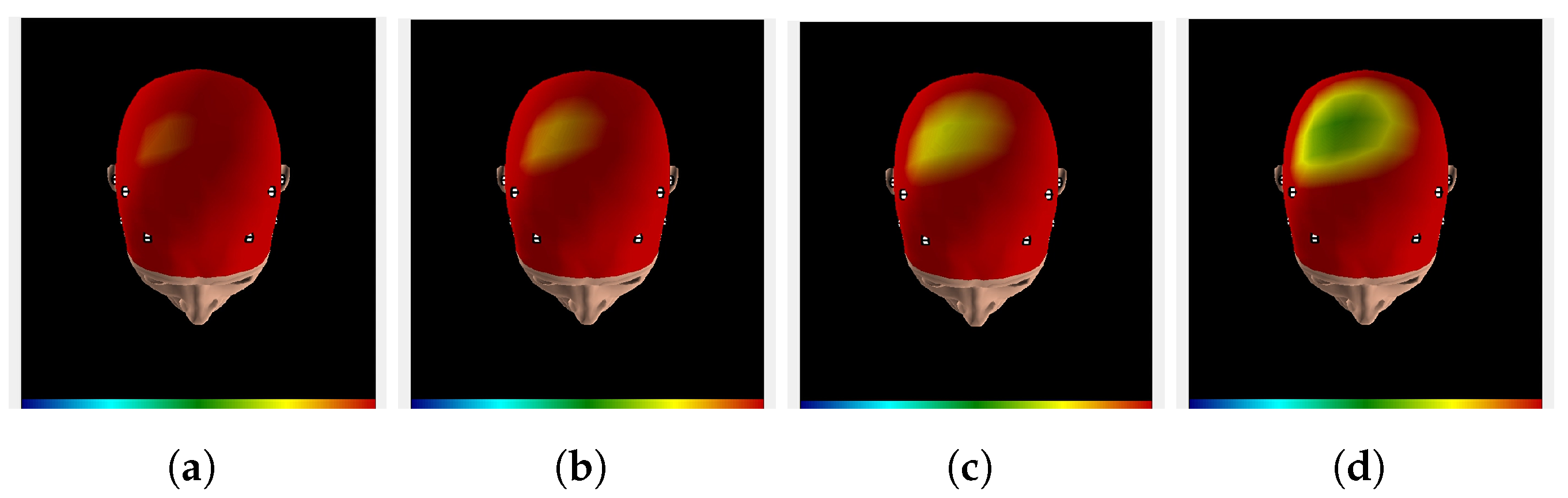
2.3. Data Acquisition
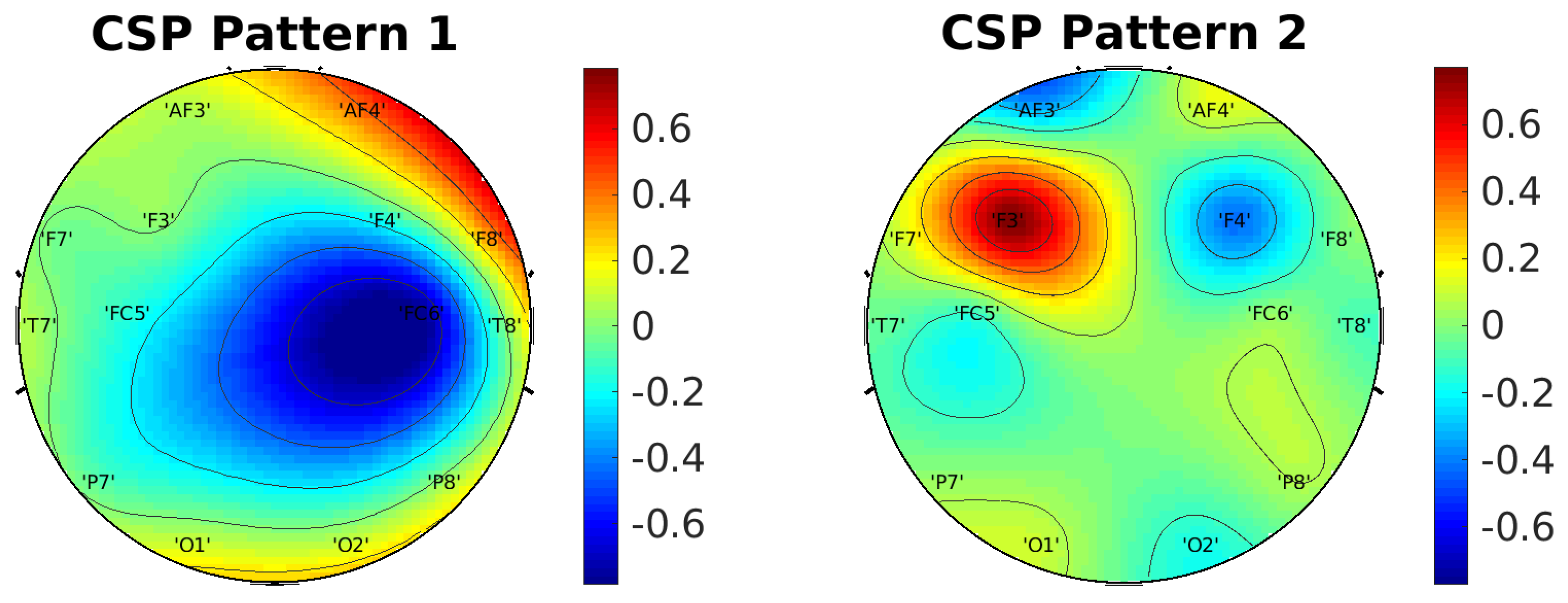
2.4. Pre-Processing and Classification
3. Experimental Results
3.1. Experimental Setup
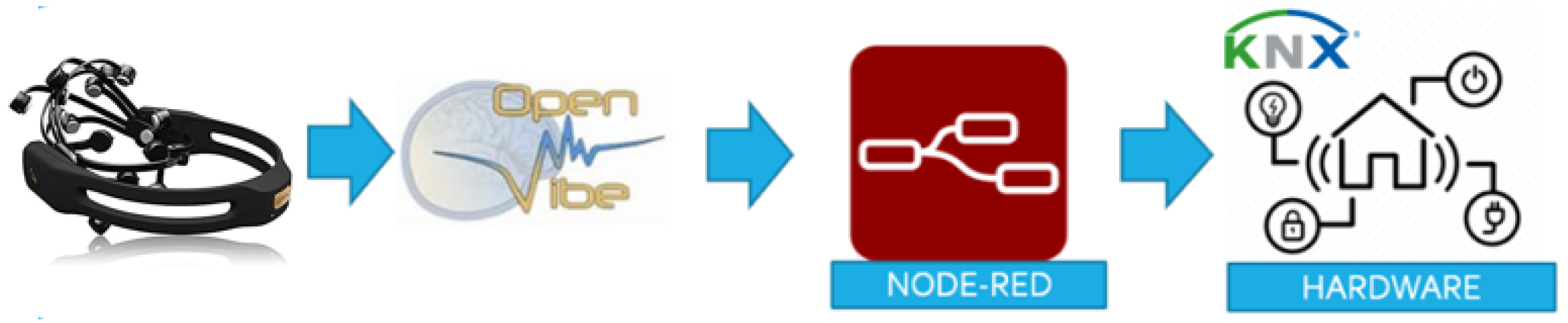
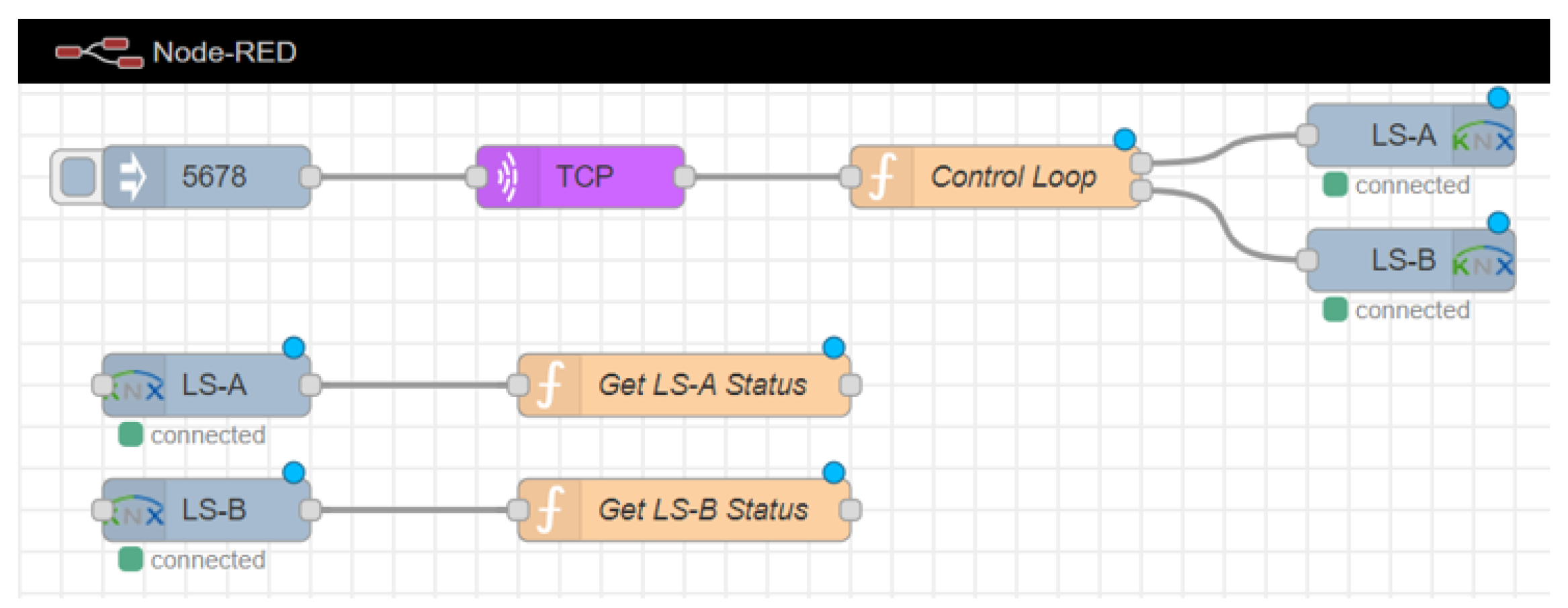
3.2. Software Implementation
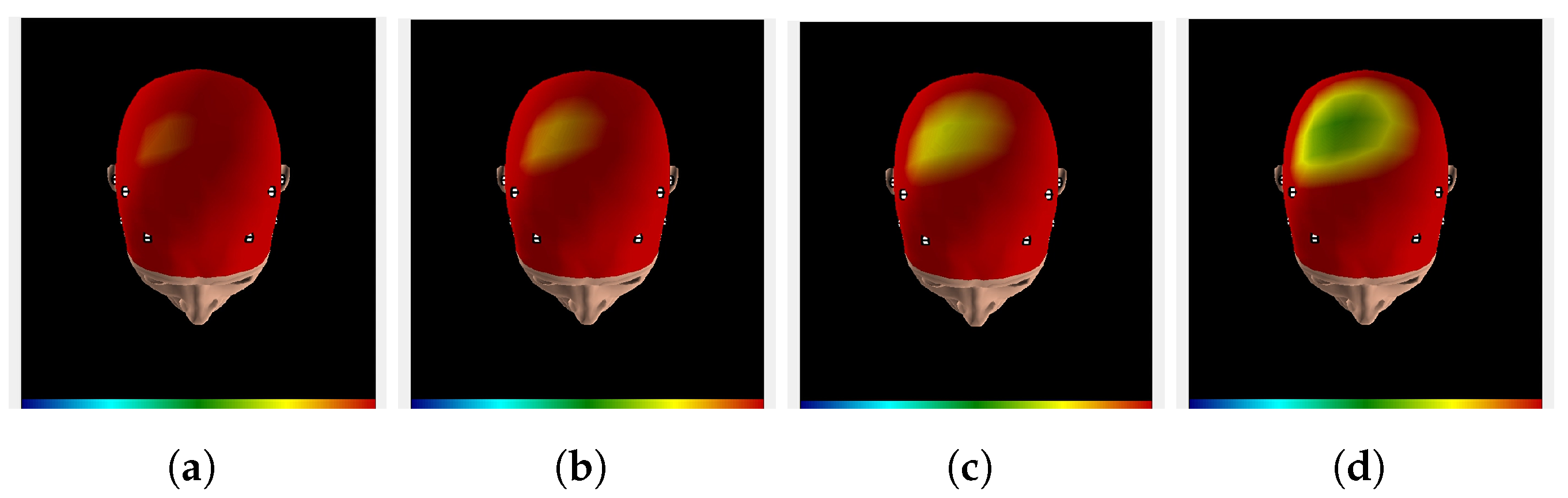
Results
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MI | Motor Imagery |
| BCI | Brain Computer Interface |
| EEG | Electroencephalogram |
| KNX | Konnex |
| EP | Evoked potentials |
| SSEP | Steady-State evoked potentials |
| ERP | Event-Related potentials |
| EMG | Electromyography |
| LDA | Linear Discriminant Analysis |
| CSP | Common Spatial Patterns |
| RCSP | Regularized-CSP |
| TCP | Transmission Control Protocol |
| IP | Internet Protocol |
| LS-A | Lighting system-A |
| LS-B | Lighting system-B |
References
- Shih, J.J.; Krusienski, D.J.; Wolpaw, J.R. Brain-Computer Interfaces in Medicine. In Proceedings of the Mayo Clinic; Elsevier: Rochester, NY, USA, 2012; Volume 87, pp. 268–279. [Google Scholar]
- Robinson, N.; Mane, R.; Chouhan, T.; Guan, C. Emerging trends in BCI-robotics for motor control and rehabilitation. Curr. Opin. Biomed. Eng. 2021, 20, 100354. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, M. A survey on robots controlled by motor imagery brain-computer interfaces. Cogn. Robot. 2021, 1, 12–24. [Google Scholar] [CrossRef]
- Zhong, S.; Liu, Y.; Yu, Y.; Tang, J.; Zhou, Z.; Hu, D. A dynamic user interface based BCI environmental control system. Int. J. Hum. Comput. Interact. 2020, 36, 55–66. [Google Scholar] [CrossRef]
- Arora, H.; Agrawal, A.P.; Choudhary, A. Conceptualizing BCI and AI in Video Games. In Proceedings of the 2019 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 18–19 October 2019; pp. 404–408. [Google Scholar]
- Sutter, E.E. The brain response interface: Communication through visually-induced electrical brain responses. J. Microcomput. Appl. 1992, 15, 31–45. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Da Silva, F.L. Event-related EEG/MEG synchronization and desynchronization: Basic principles. Clin. Neurophysiol. 1999, 110, 1842–1857. [Google Scholar] [CrossRef] [PubMed]
- Yuan, H.; He, B. Brain–computer interfaces using sensorimotor rhythms: Current state and future perspectives. IEEE Trans. Biomed. Eng. 2014, 61, 1425–1435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ortner, R.; Irimia, D.C.; Scharinger, J.; Guger, C. A motor imagery based brain-computer interface for stroke rehabilitation. Annu. Rev. Cyberther. Telemed. 2012, 181, 319–323. [Google Scholar]
- Aljalal, M.; Ibrahim, S.; Djemal, R.; Ko, W. Comprehensive review on brain-controlled mobile robots and robotic arms based on electroencephalography signals. Intell. Serv. Robot. 2020, 13, 539–563. [Google Scholar] [CrossRef]
- Wang, W.; Yang, B.; Guan, C.; Li, B. A VR Combined with MI-BCI Application for Upper Limb Rehabilitation of Stroke. In Proceedings of the 2019 IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Nanjing, China, 6–8 May 2019; Volume 1, pp. 1–4. [Google Scholar]
- Prapas, G.; Glavas, K.; Tzallas, A.T.; Tzimourta, K.D.; Giannakeas, N.; Tsipouras, M.G. Motor Imagery Approach for BCI Game Development. In Proceedings of the 2022 7th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Ioannina, Greece, 23–25 September 2022; pp. 1–5. [Google Scholar]
- Choi, J.W.; Huh, S.; Jo, S. Improving performance in motor imagery BCI-based control applications via virtually embodied feedback. Comput. Biol. Med. 2020, 127, 104079. [Google Scholar] [CrossRef] [PubMed]
- Perdikis, S.; Leeb, R.; d R Millán, J. Context-aware adaptive spelling in motor imagery BCI. J. Neural Eng. 2016, 13, 036018. [Google Scholar] [CrossRef] [PubMed]
- Anindya, S.F.; Rachmat, H.H.; Sutjiredjeki, E. A Prototype of SSVEP-Based BCI for Home Appliances Control. In Proceedings of the 2016 1st International Conference on Biomedical Engineering (IBIOMED), Bali, Indonesia, 5–6 October 2016; pp. 1–6. [Google Scholar]
- Luu, B.; Hansberger, B.; Chiu, M.; Shivappa, V.K.K.; George, K. Scalable Smart Home Interface Using Occipitalis sEMG Detection and Classification. In Proceedings of the 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 8–10 November 2018; pp. 1002–1008. [Google Scholar]
- Kumar, P.; Saini, R.; Sahu, P.K.; Roy, P.P.; Dogra, D.P.; Balasubramanian, R. Neuro-Phone: An Assistive Framework to Operate Smartphone Using EEG Signals. In Proceedings of the 2017 IEEE Region 10 Symposium (TENSYMP), Cochin, India, 14–16 July 2017; pp. 1–5. [Google Scholar]
- Miralles, F.; Vargiu, E.; Dauwalder, S.; Solà, M.; Müller-Putz, G.; Wriessnegger, S.C.; Pinegger, A.; Kübler, A.; Halder, S.; Käthner, I.; et al. Brain computer interface on track to home. Sci. World J. 2015, 2015, 623896. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chestek, C.A.; Gilja, V.; Blabe, C.H.; Foster, B.L.; Shenoy, K.V.; Parvizi, J.; Henderson, J.M. Hand posture classification using electrocorticography signals in the gamma band over human sensorimotor brain areas. J. Neural Eng. 2013, 10, 026002. [Google Scholar] [CrossRef] [PubMed]
- Kapeller, C.; Schneider, C.; Kamada, K.; Ogawa, H.; Kunii, N.; Ortner, R.; Prueckl, R.; Guger, C. Single Trial Detection of Hand Poses in Human ECoG Using CSP Based Feature Extraction. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 4599–4602. [Google Scholar]
- Solon, A.J.; Lawhern, V.J.; Touryan, J.; McDaniel, J.R.; Ries, A.J.; Gordon, S.M. Decoding P300 variability using convolutional neural networks. Front. Hum. Neurosci. 2019, 13, 201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yger, F.; Berar, M.; Lotte, F. Riemannian approaches in brain-computer interfaces: A review. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 1753–1762. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, H.; Park, J.; Yang, Y.M. Whitening technique based on gram–schmidt orthogonalization for motor imagery classification of brain–computer interface applications. Sensors 2022, 22, 6042. [Google Scholar] [CrossRef] [PubMed]
- Bishop, C.M.; Nasrabadi, N.M. Pattern Recognition and Machine Learning; Springer: Cham, Switzerland, 2006; Volume 4. [Google Scholar]
- Dornhege, G.; Millan, J.d.R.; Hinterberger, T.; McFarland, D.J.; Müller, K.R. Toward Brain-Computer Interfacing; MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Lotte, F.; Guan, C. Regularizing common spatial patterns to improve BCI designs: Unified theory and new algorithms. IEEE Trans. Biomed. Eng. 2010, 58, 355–362. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subjects | Number of Trials | Training Phase Accuracy |
|---|---|---|
| 1 | 40 | 73.32% |
| 2 | 40 | 71.20% |
| 3 | 40 | 70.01% |
| 4 | 40 | 71.50% |
| Subject | Number of Tasks | Testing Phase Accuracy |
|---|---|---|
| 1 | 10 | 80% |
| 2 | 10 | 70% |
| 3 | 10 | 70% |
| 4 | 10 | 70% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cariello, S.; Sanalitro, D.; Micali, A.; Buscarino, A.; Bucolo, M. Brain–Computer-Interface-Based Smart-Home Interface by Leveraging Motor Imagery Signals. Inventions 2023, 8, 91. https://doi.org/10.3390/inventions8040091
Cariello S, Sanalitro D, Micali A, Buscarino A, Bucolo M. Brain–Computer-Interface-Based Smart-Home Interface by Leveraging Motor Imagery Signals. Inventions. 2023; 8(4):91. https://doi.org/10.3390/inventions8040091
Chicago/Turabian StyleCariello, Simona, Dario Sanalitro, Alessandro Micali, Arturo Buscarino, and Maide Bucolo. 2023. "Brain–Computer-Interface-Based Smart-Home Interface by Leveraging Motor Imagery Signals" Inventions 8, no. 4: 91. https://doi.org/10.3390/inventions8040091
APA StyleCariello, S., Sanalitro, D., Micali, A., Buscarino, A., & Bucolo, M. (2023). Brain–Computer-Interface-Based Smart-Home Interface by Leveraging Motor Imagery Signals. Inventions, 8(4), 91. https://doi.org/10.3390/inventions8040091