1. Introduction
Accelerometers and optomechanical acceleration sensors (OMASs) [
1,
2] are widely used in various applications, starting from stationary and the very low-frequency range for geodesy and space navigation [
3] to metrology and vibration tests with frequencies up to several kilohertz [
4,
5,
6]. For acceleration measurements with the help of OMAS, a Fabry–Perot optical cavity is used. One of the cavity mirrors is located on the movable OMAS test mass, and the second mirror is mounted motionless relative to the first [
1]. Both mirrors are covered with high reflective coatings. When acceleration is applied to such a system, the test mass displaces, changing the length of the cavity
L. The change in
L is measured with an optical cavity readout method [
7].
The use of OMAS allows accurate measurements over long periods [
7] and they are not influenced by electromagnetic disturbances [
8].
In many applications, such as in space missions, triaxial acceleration measurement is required [
7]. Such measurements are recommended to be performed with the help of a flat arrangement, having one out-of-plane sensor and two in-plane sensors oriented in perpendicular directions [
7].
One of the known types of optomechanical inertial sensors [
1,
9] can be applied for in-plane acceleration measurement. It is used in different applications due to its rather plain and functional design, consisting of a flat proof mass fastened to the outer constrained frame by two flexible, thin consoles (see
Figure 1). However, such sensors have a maximum level of the first eigenfrequency of about 10 kHz [
9], so the improved design should be elaborated to provide higher natural frequencies.
For out-of-plane acceleration measurements, sensors with a drum-type design consisting of a proof mass suspended by four thin flexures in the middle of the outer constrained frame are currently used [
1,
10]. Such sensors were elaborated for providing higher natural frequencies, namely the first eigenfrequency is about 2 kHz. To ensure smaller (of several hertz) and higher natural frequencies (of tens of kilohertz), the improved designs should be elaborated.
OMASs are quite complex to manufacture because they are made from a single piece of fused silica to ensure their mechanical properties and highly reflective coatings must be applied to the surfaces that form the Fabry–Perot cavity [
1,
7]. This leads to a significant increase in their cost. It is advisable to manufacture several OMASs at once, rather than just one trial OMAS. This leads to the need for the preliminary modeling of mechanical processes in OMASs to select their design and parameters based on the required operating frequency, dimensions, and conditions for the optical readout of the movement of the moving part (out-of-plane or in-plane configurations). In this work, we compare the simulation data with known experimental levels to validate the obtained results. Further work is planned on the implementation of the developed OMAS designs and their experimental investigations.
The purpose of this work is to select both in-plane and out-of-plane OMAS designs, depending on the frequency of the measured acceleration. These OMASs must have reduced levels of dissipation loss and crosstalk.
Mathematical modeling can be used to achieve this goal by comparing the mechanical characteristics of OMASs of different designs. This allows us to evaluate the OMAS characteristics such as natural frequencies, as well as participation factors and dissipation losses.
To simulate mechanical processes, Newton’s second law is used, written in the frequency domain for linearly elastic materials [
11]:
where
u [m] is displacement;
ω [1/s] is applied force circular frequency;
ρ0 [kg/m
3] is mass density;
F [N/m
3] and
ϕ are the applied volume force module and its initial phase, respectively;
P [N/m
2] is the first Piola–Kirchhoff stress tensor;
j =
.
For modeling the mechanical processes, the numerical calculations with the help of COMSOL Multiphysics 5.6 were used, as analytical methods can only be applied to structures with a rather plain design (see, for instance, [
12,
13]). To consider the processes connected with thermoelastic damping in linear viscoelastic materials, the generalized Kelvin–Voigt model was applied, which is recommended for describing processes in glassy polymers [
14].
An analysis of the participation factors enables a prediction of the influence of displacements in different directions on the resulting shape of the movement modes. Participation factors calculation provides information on the “weight” of each eigenmode in a resulting movement. The displacement
uk can be presented as a sum of the eigenmodes [
11]:
where
is (
k,
i)-th eigenmode amplitude;
uk,i is a factor determining (
k,
i)-th eigenmode shape; and
n is a total number of the eigenmodes;
is the pseudo-acceleration spectrum;
[m/s
2] is the acceleration spectra in the
k-th direction (corresponds to the
x,
y, or
z);
i is an eigenmode number;
ωi [1/s] is
i-th circular eigenfrequency; and
Γk,i is the
i-th mode participation factor in the
k-th direction.
Considering the participation factor levels allows us to better understand the influence of each eigenfrequency mode on the resulting displacement mode shape. Participation factors also help to evaluate the so-called crosstalk, i.e., the influence of the movement of the test mass in directions that do not coincide with the direction of the acceleration measurement.
OMAS design should provide high sensitivity to enable high-precision acceleration measurement. The acceleration measurement with the help of OMAS is based on using a Fabry–Perot optical cavity [
1], but the accuracy of the acceleration measurements mainly depends on the OMAS mechanical characteristics. A simplified representation of the minimal measured acceleration is written as follows [
10,
15]:
where
kB = 1.380649 × 10
−23 J/K is the Boltzmann’s constant;
T is the temperature [K];
ω0 [1/s
2] is the OMAS natural frequency;
Q is the mechanical quality factor;
m [kg] is the mass of the OMAS moving part.
From Equation (3), it is clear how the accuracy of acceleration measurement is affected by mass, quality factor, and natural frequency.
To provide the liner dependence between the measured acceleration
a [m/s
2] and the OMAS test mass displacement
Z [m] [
7]:
the operating frequency should be at least an order less than
ω0 corresponding to the first eigenfrequency of OMAS.
3. Analysis of the Mechanical Characteristics of the Out-of-Plane OMAS
To provide acceleration measurement in the
z axis direction, i.e., outside the plane in which accelerations in the
x and
y directions are measured, another type of sensor can be used, namely OMAS of the drum type, presented elsewhere [
1,
10,
18]. The considered OMAS for acceleration measurements in the
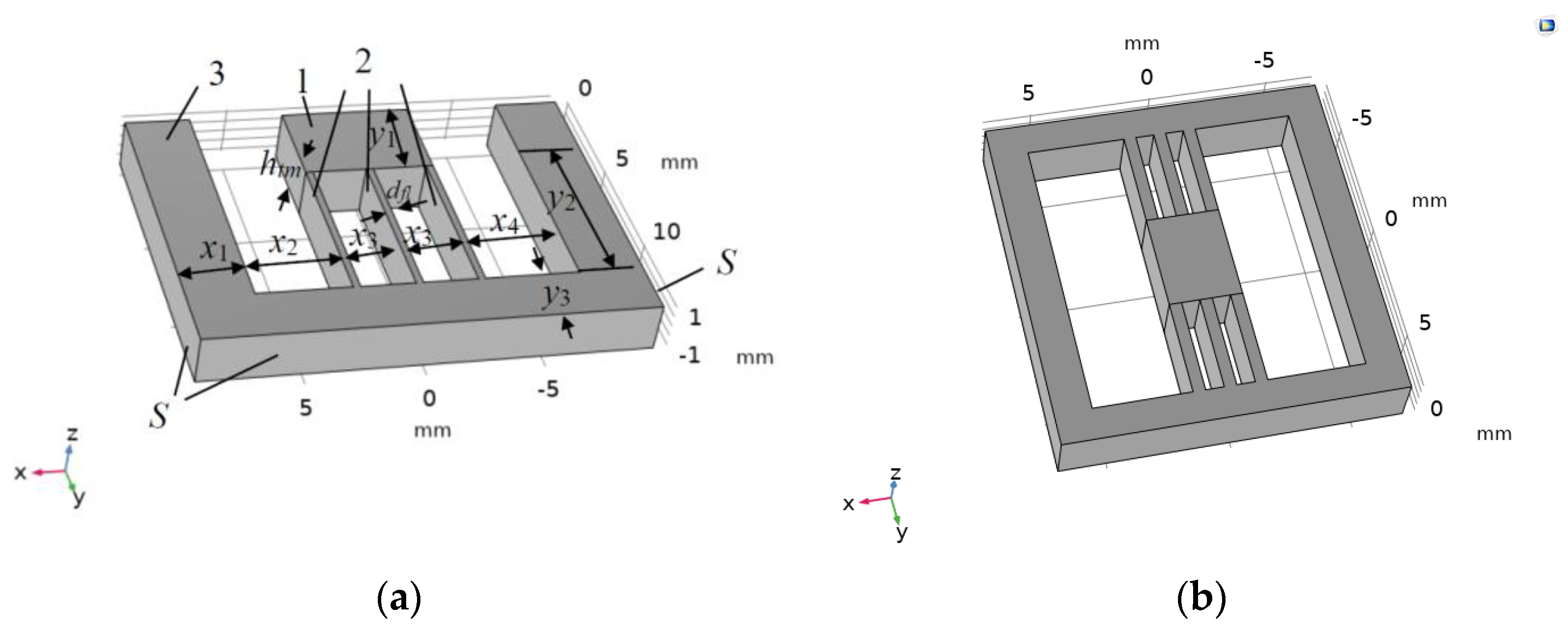
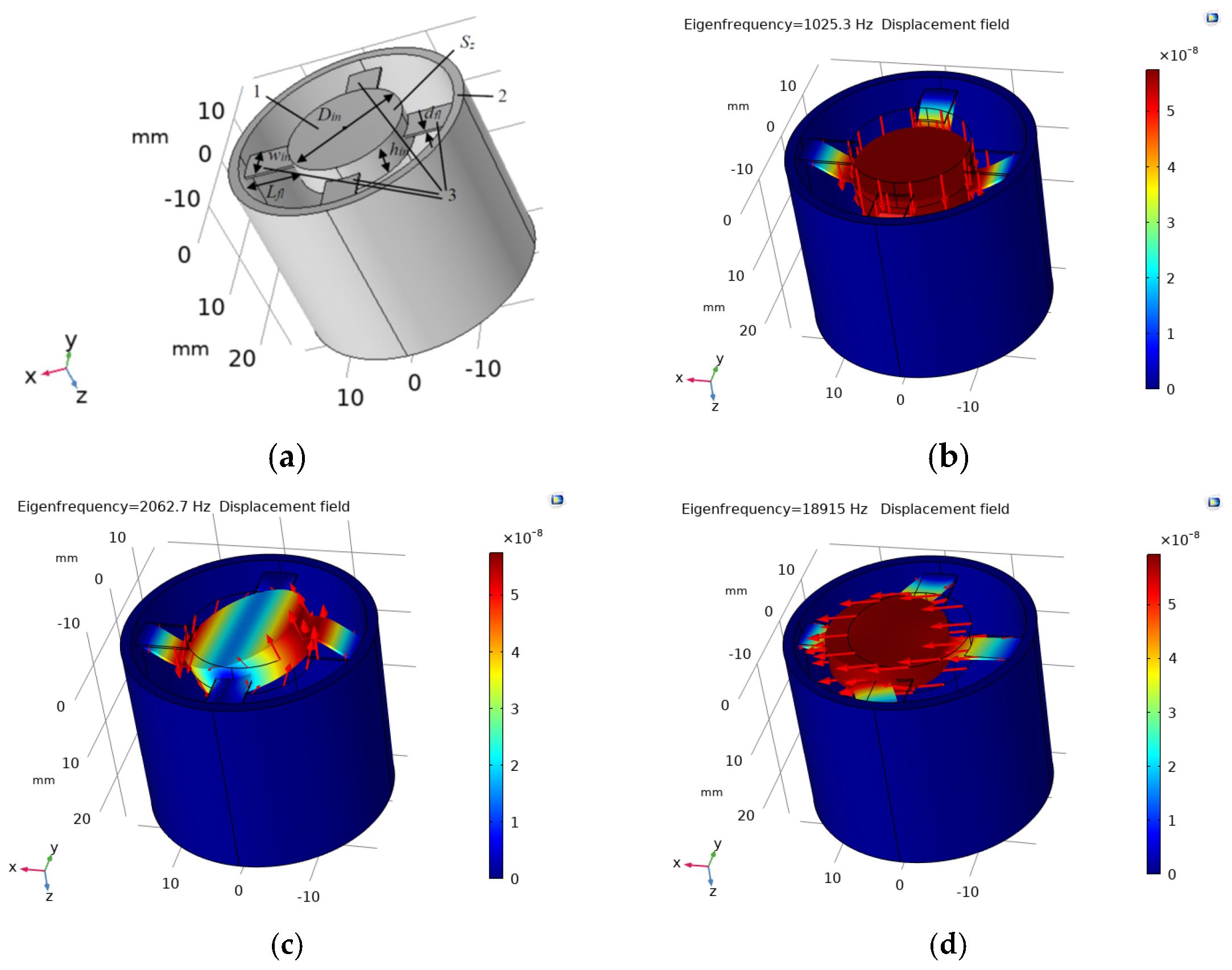
z direction is made of fused silica and has the following geometry [
10]: the inner cylindrical structure 1 (the OMAS test mass) has a diameter
Din = 17.3 mm, a square
Sin = 235 mm
2, a thickness
hin = 4.44 mm, and a mass
m =
ρfs·π·(
Din/2)
2·
hin = 2.3 g (see
Figure 12a). The moving test mass 1, on which a mirror for acceleration measurements is located, fastens to the outer constrained cylinder 2 by four flexures 3 having a length
Lfl = 7.6 mm, a width
wfl = 5 mm, and a thickness
dfl = 310 μm.
To appreciate the output characteristics of the OMAS with such a design, we modeled the mechanical processes in it, considering the thermoelastic viscoelasticity.
Figure 12b–d shows calculated displacement mode shapes for the first three eigenfrequencies for this OMAS, where the red arrows present the displacement field. Comparison of the simulated levels of the first three eigenfrequencies with the data from [
10] for such an OMAS experimental sample has shown that their relative differences are less than 2%.
3.1. Designs of the Out-of-Plane OMAS with High Natural Frequencies
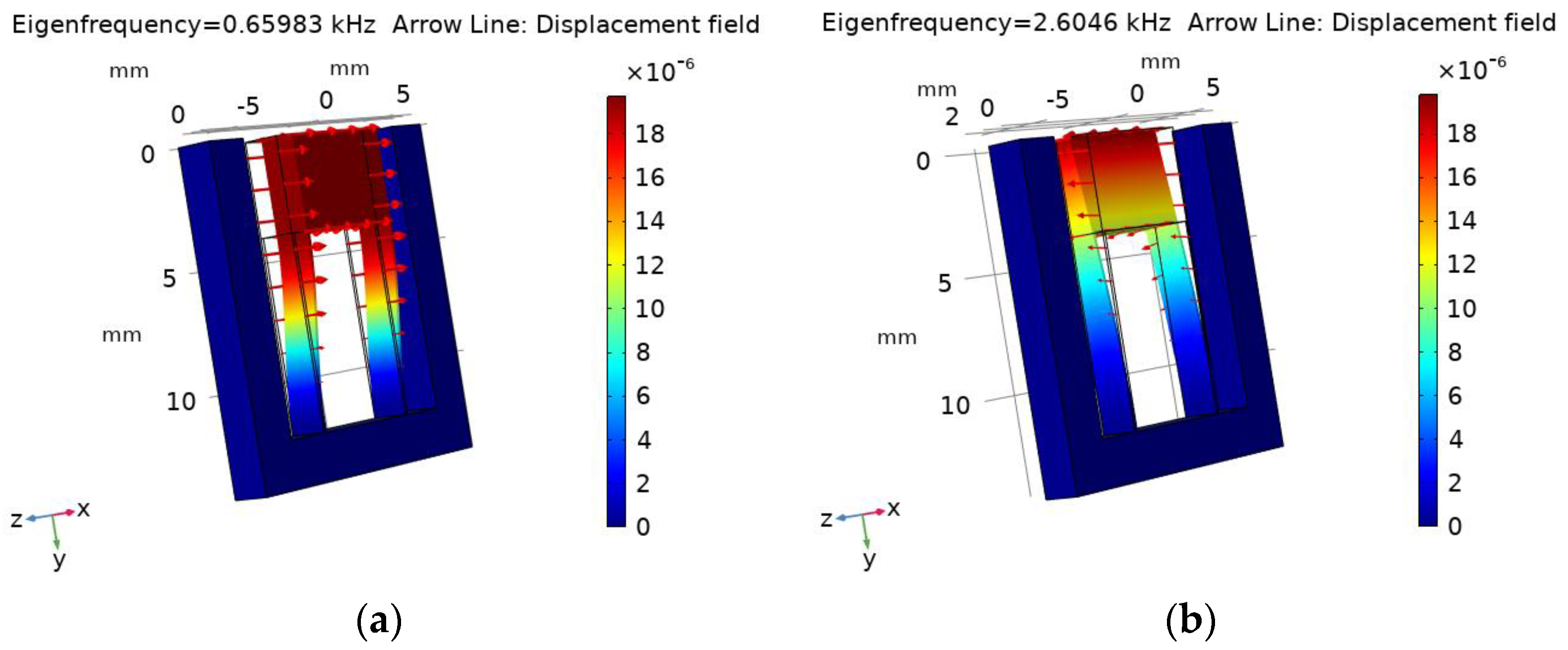
To provide a higher frequency of the three-axial acceleration measurements in the z axis direction outside the plane in which we measure accelerations in the x and y directions, we propose an upgraded design of the sensor. The purpose of upgrading the OMAS design was also to provide a reduction in the influence of higher harmonics and forces in directions perpendicular to the direction of measurement on the levels of measured accelerations.
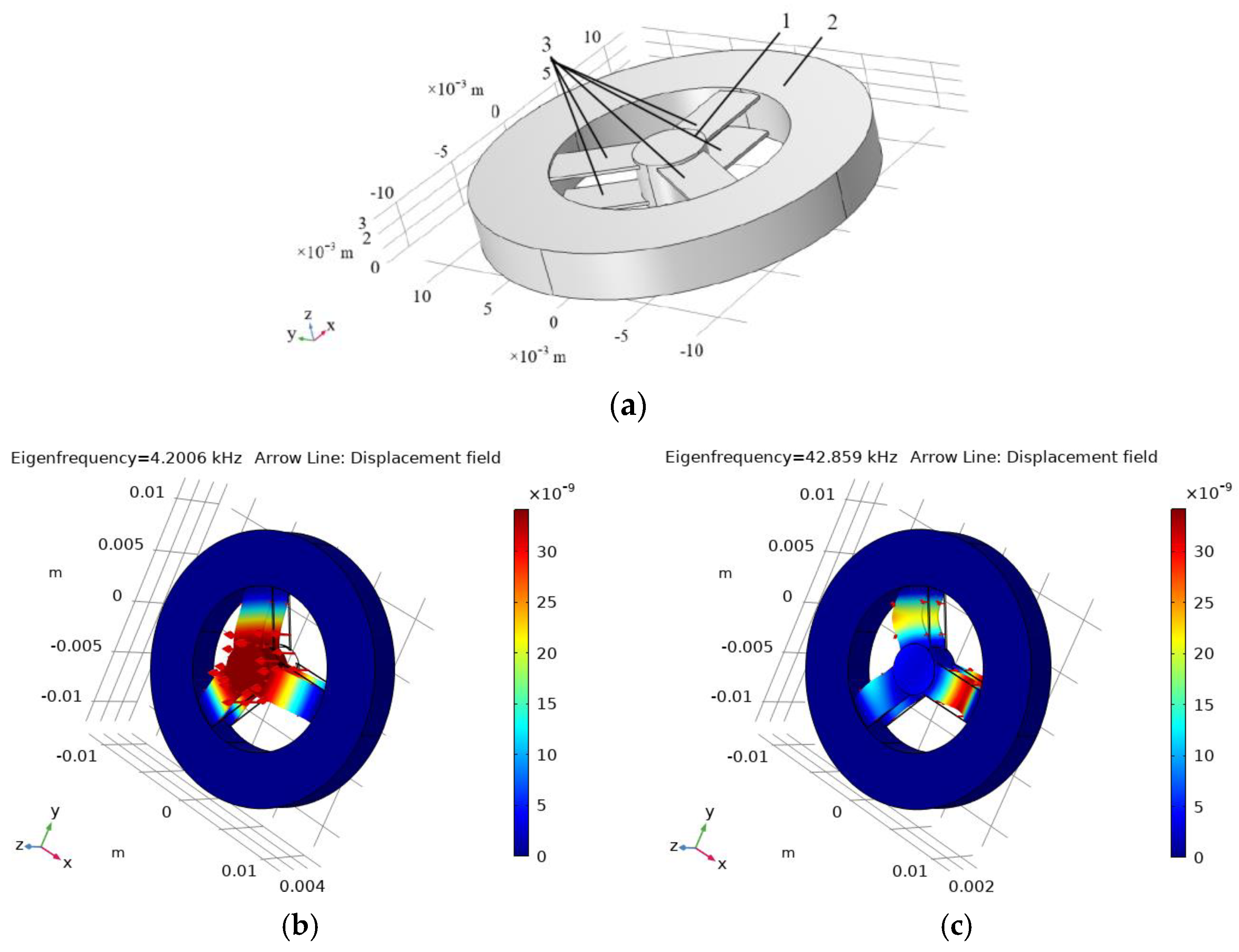
To achieve the higher levels of natural frequencies, it is proposed that we use three pairs of flexures 3 connecting the moving 1 and constrained 2 parts of the OMAS (see
Figure 13a). In each such pair, the flexures are located one above the other so that one is attached to the lower and the other to the upper parts of the test mass 1 and the constrained structure 2. Such an OMAS has the following geometry: the OMAS test mass 1 has a diameter
Din = 4.4 mm, a thickness
hin = 3 mm, and a mass
m =
ρfs·π·(
Din/2)
2·
hin = 0.1 mg. The moving test mass 1, on which a mirror for the acceleration measurements is located, is fastened to the outer cylinder 2 by six flexures 3 having a length
Lfl = 5 mm, a width
wfl = 3 mm, and a thickness
dfl = 200 μm. The material is fused silica.
This OMAS design makes it possible to increase the first eigenfrequency by more than 4 times, as well as the ratio between the second and first eigenfrequencies from 2 to 10 compared to the OMAS prototype (see
Figure 12b,c and
Figure 13b,c).
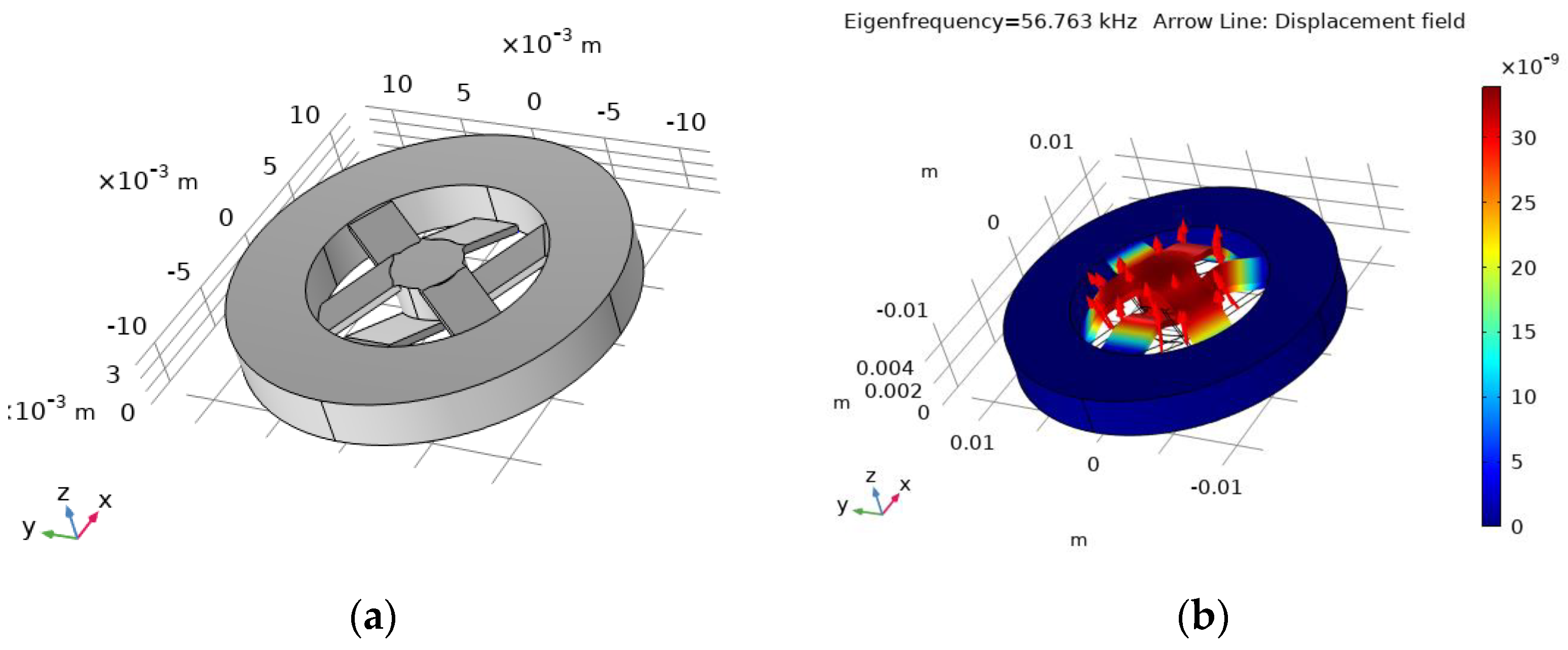
To further increase the level of natural frequencies, the OMAS-improved design is proposed (see
Figure 14a), differing from that shown in
Figure 13a in such a way that three of the flexures are attached with one end to the top of the test mass and the other end is attached to the bottom of the outer constrained ring. And, vice versa, another three flexures are attached with one end to the bottom of the test mass, and the other end is attached to the top of the outer constrained ring. To eliminate cross-talk with other directions, the flexures are connected identically through one (see
Figure 14a). This OMAS configuration can provide the levels of the first eigenfrequency up to 56 kHz (see
Figure 14b).
Such an OMAS made of fused silica has the following geometry: the test mass with a diameter Din = 4.4 mm, a thickness hin = 3 mm, a mass m = ρfs·π·(Din/2)2·hin = 0.1 mg, flexures length Lfl = 5 mm, a width wfl = 3 mm, and a thickness dfl = 500 μm.
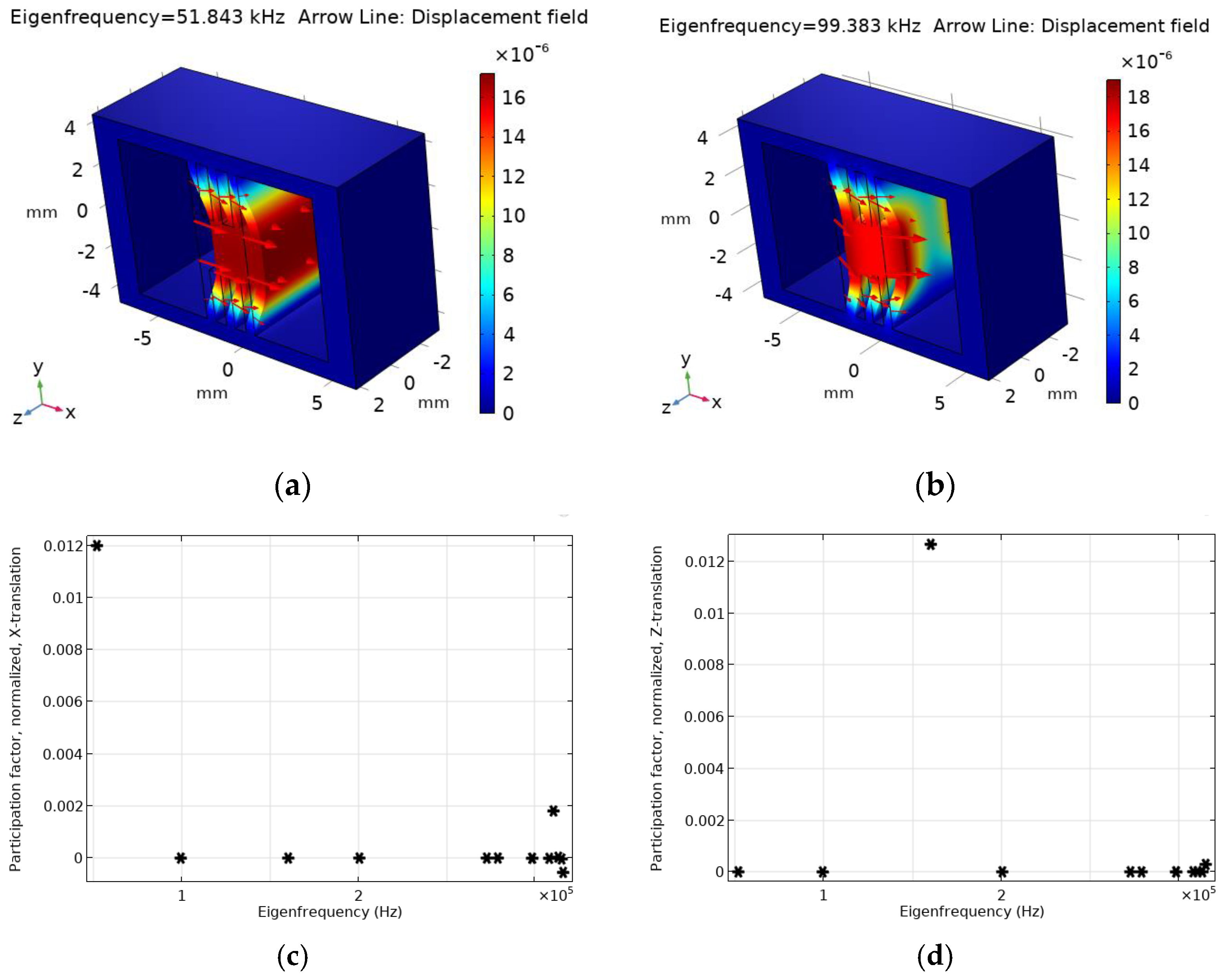
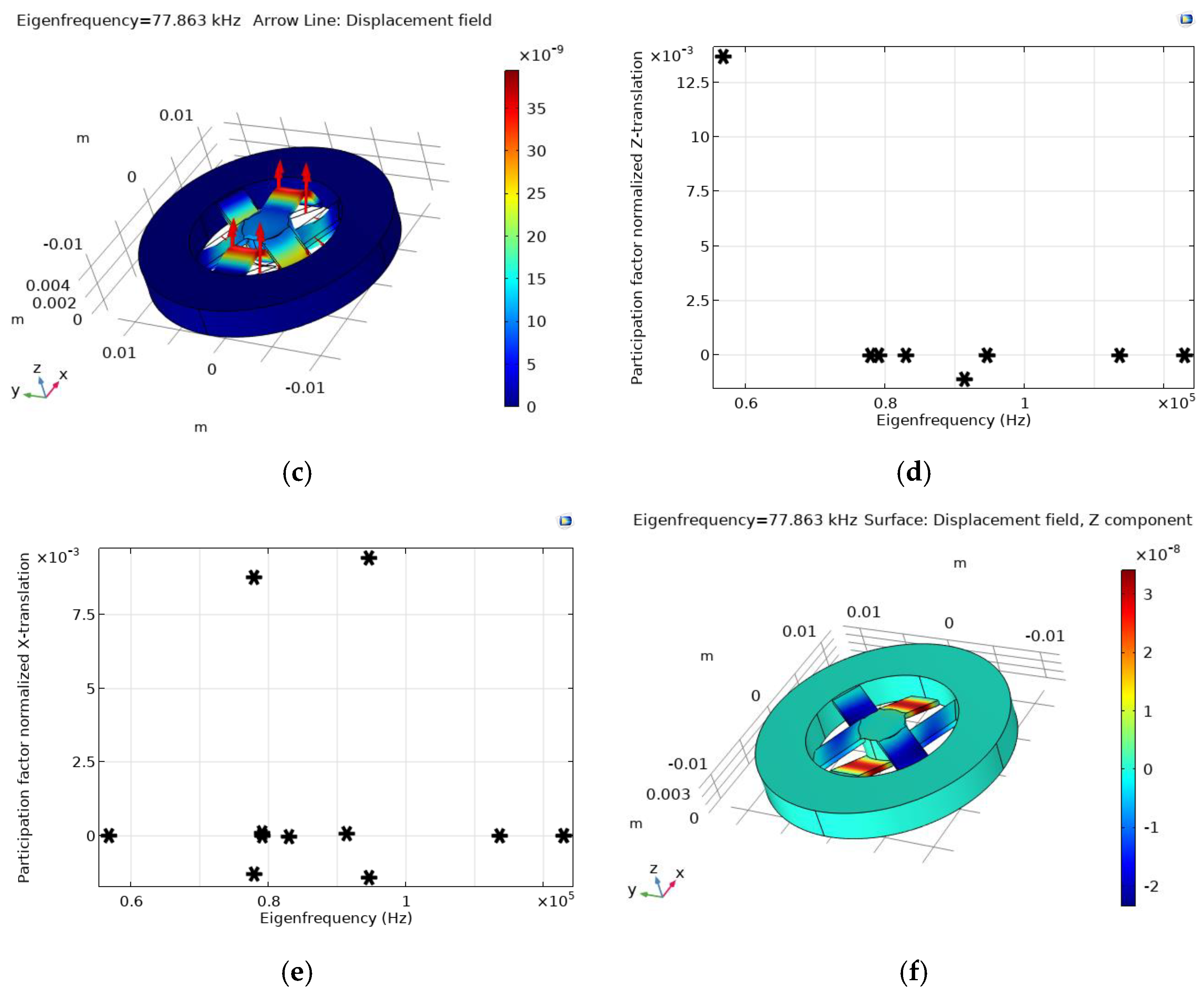
Only the participation factors of the
X and
Z translations are presented because, due to the symmetrical OMAS design, the participation factors of the
Y translation are identical to those of
X. As follows from the calculations, the value of the participation factor of the second eigenfrequency in the
x direction perpendicular to the direction of measured acceleration (
z), is comparable to the participation factor for the first eigenfrequency in the
z direction (see
Figure 14d,e). However, for the second eigenmode, we only have a displacement of the flexures in the
z direction and no displacements of the test mass in this direction (see
Figure 14f). This shows that cross-talk with the directions perpendicular to the
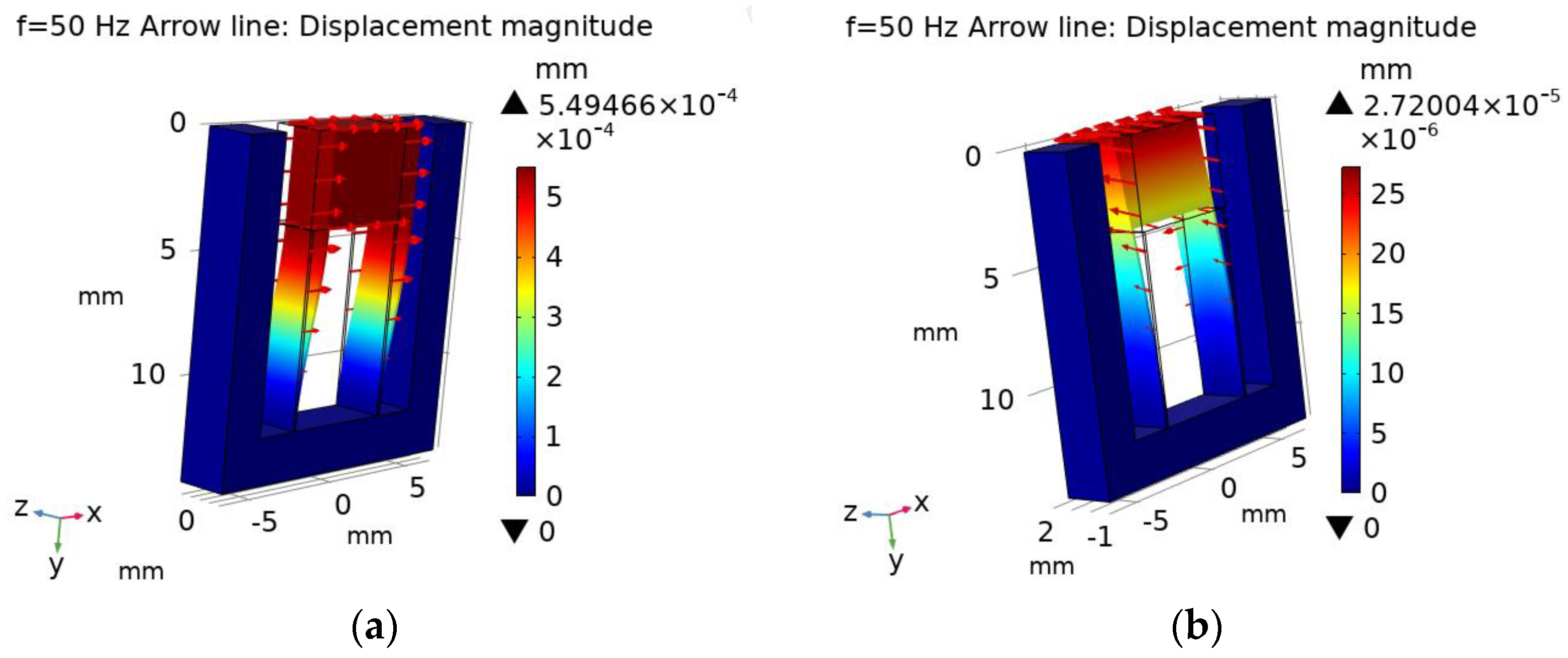
z directions is negligible. We also used numerical modeling, which involved applying the acceleration at a frequency equal to the second eigenfrequency in the
x or
y directions and estimating the magnitude of the displacement of the test mass in this case compared to its displacement in the
z direction. We found that the magnitude of such a displacement of the test mass in the
z direction at the second eigenfrequency is an order of magnitude smaller than in the perpendicular directions.
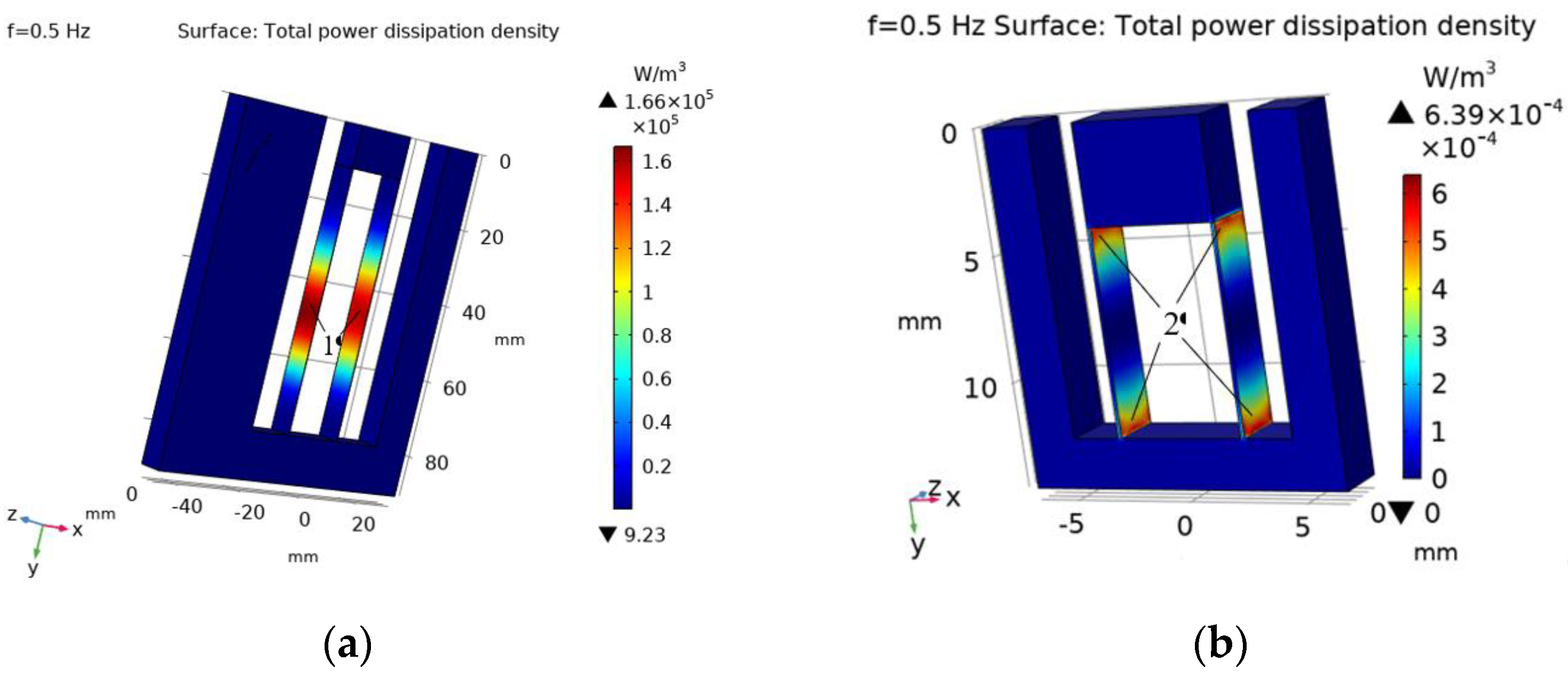
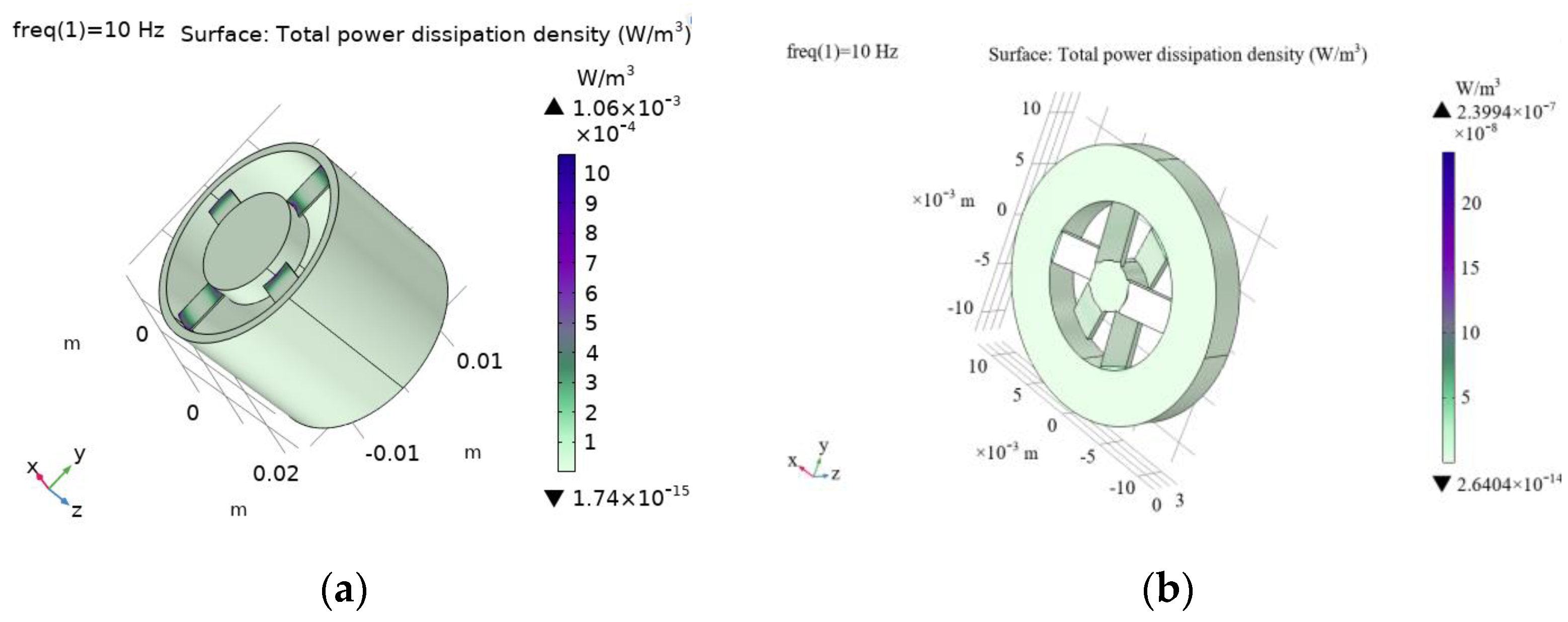
Simulations show that, due to a more uniform distribution of mechanical stress in the skewed flexures of the proposed drum-type OMAS (see
Figure 14a), the power dissipation density is reduced substantially compared to the case of the OMAS prototype [
10] (see
Figure 15). The simulation was carried out when acceleration
az =
g with a frequency
f = 10 Hz was applied to the outer part of the OMAS.
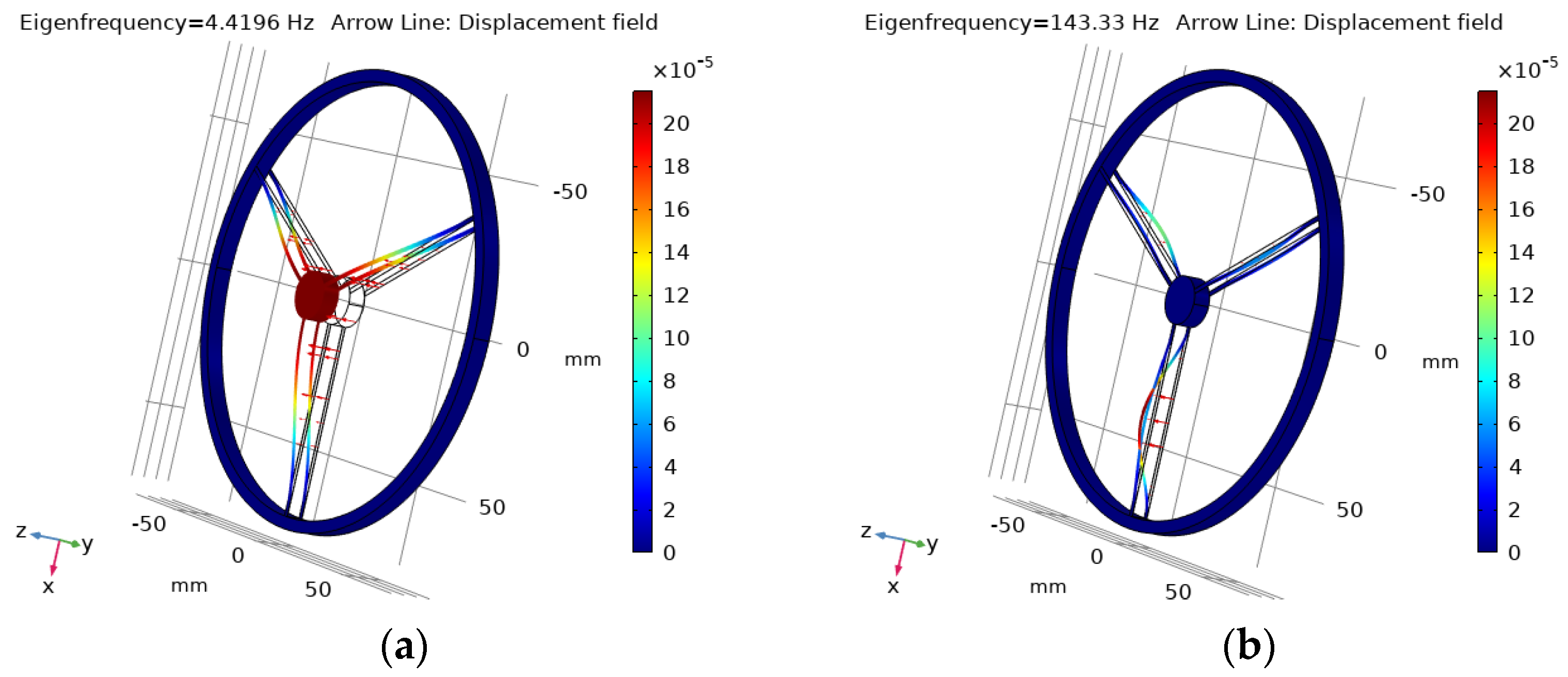
3.2. Designs of the Out-of-Plane OMAS with Low Natural Frequencies
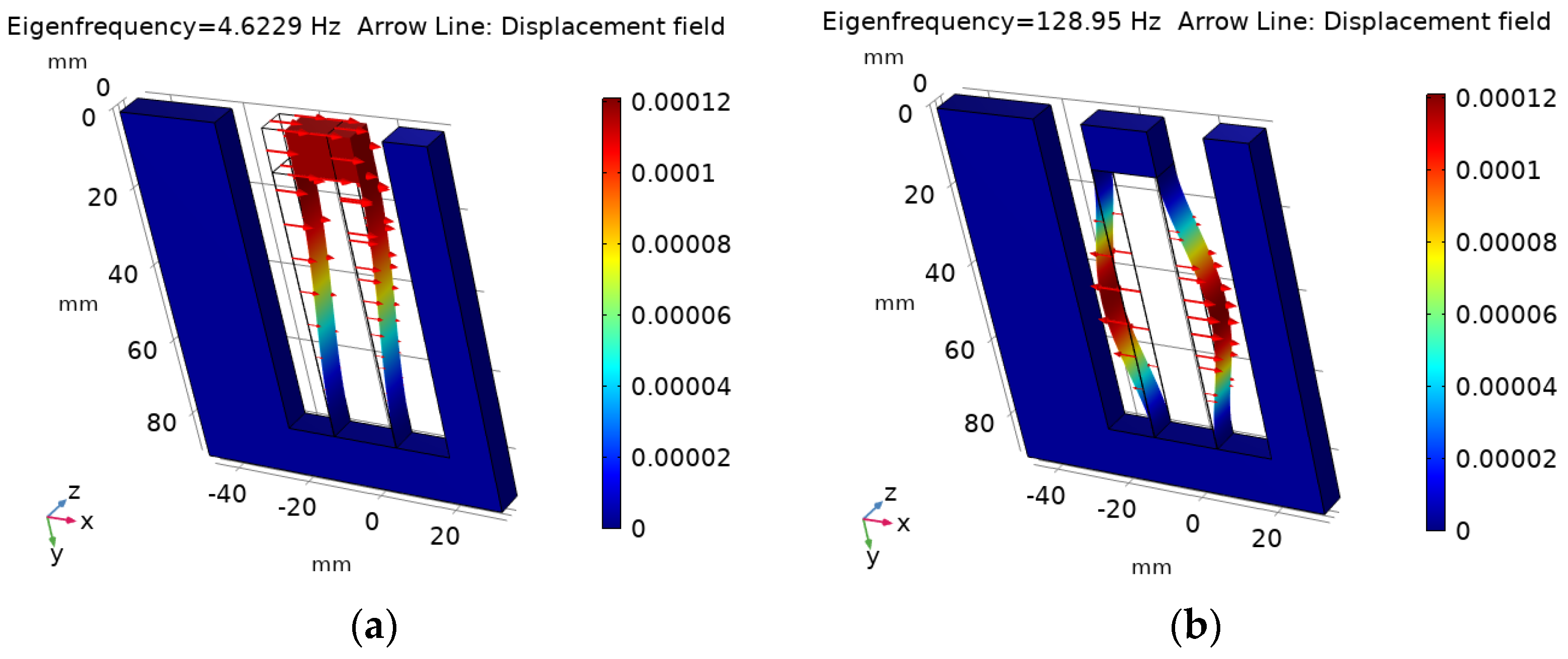
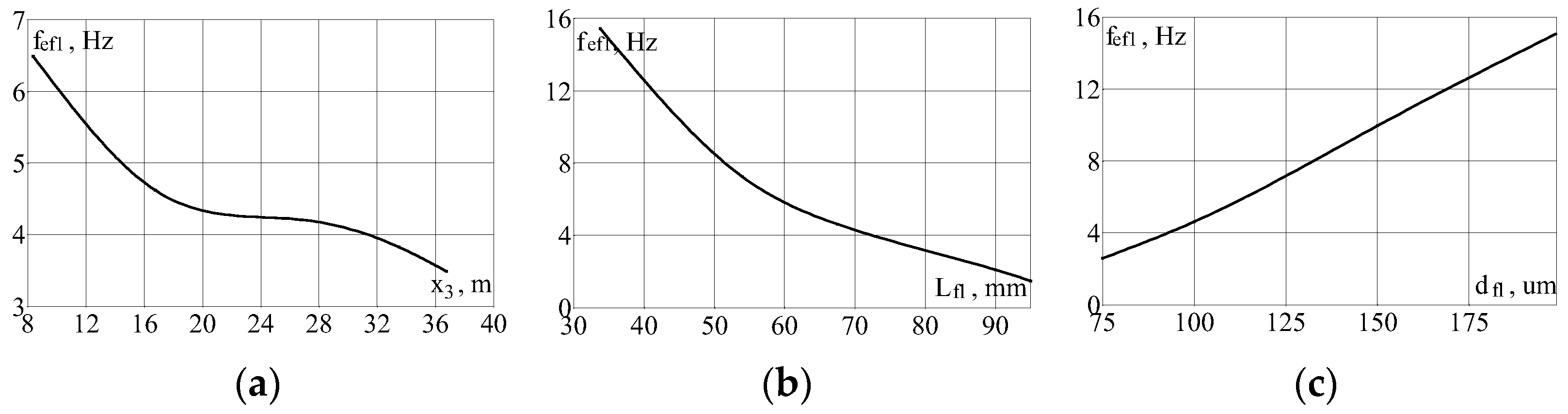
For the cases where the low-frequency accelerations should be measured using out-of-plane OMAS, the design with the following parameters is proposed: test mass 1 has a diameter
Din = 16 mm, a thickness
hin = 6 mm, and a mass
m =
ρfs·π·(
Din/2)
2·
hin = 2.66 g (see
Figure 13a). The moving test mass 1, on which a mirror for acceleration measurements is located, is fastened to the outer cylinder 2 by six flexures 3 having a length
Lfl = 6.4 mm, a width
wfl = 2 mm, and a thickness
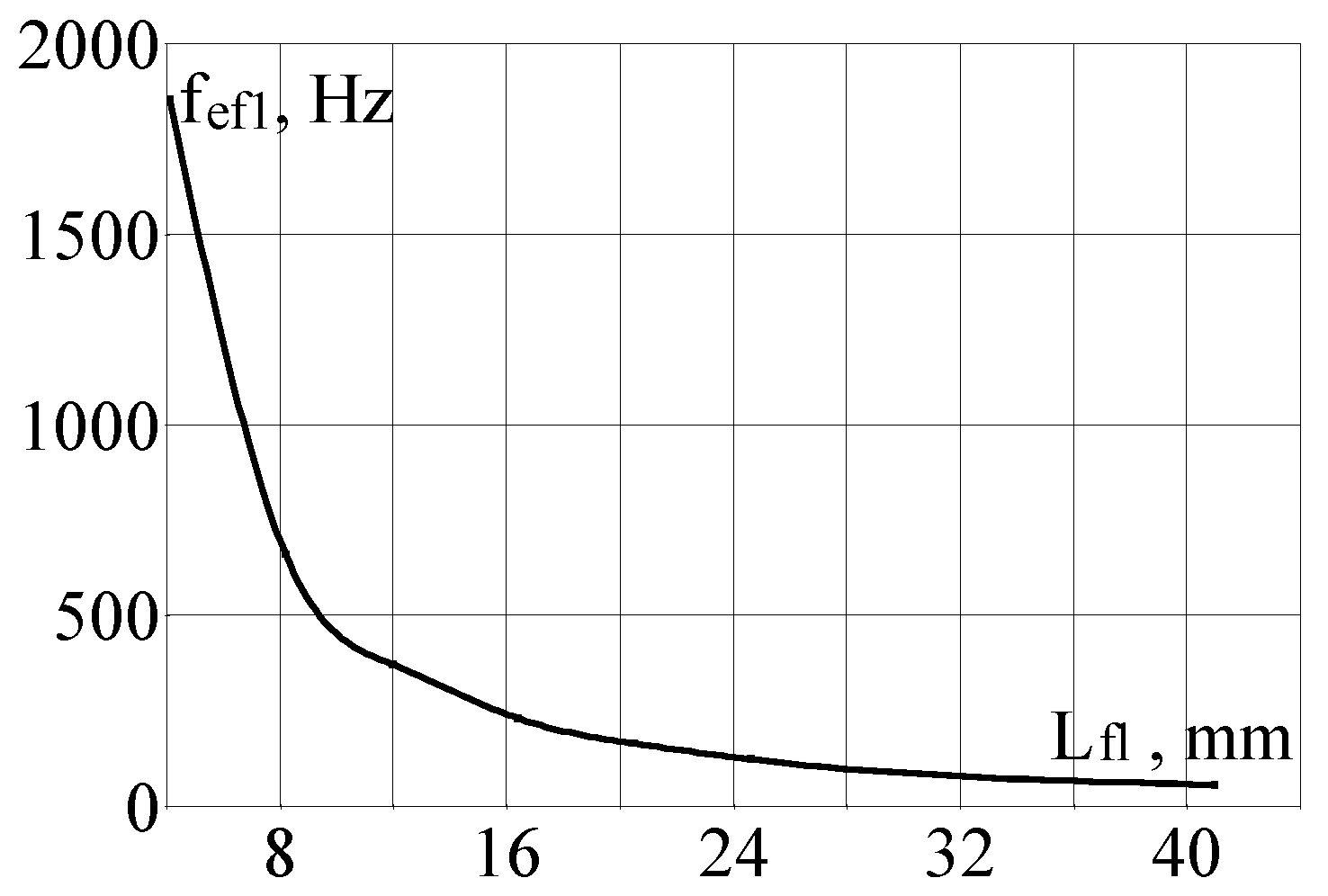
dfl = 100 μm. The material is fused silica. The geometrical parameters of such an OMAS design were chosen to provide approximately the same eigenfrequencies as for in-plane VLF OMAS (see
Figure 2 and
Figure 16).
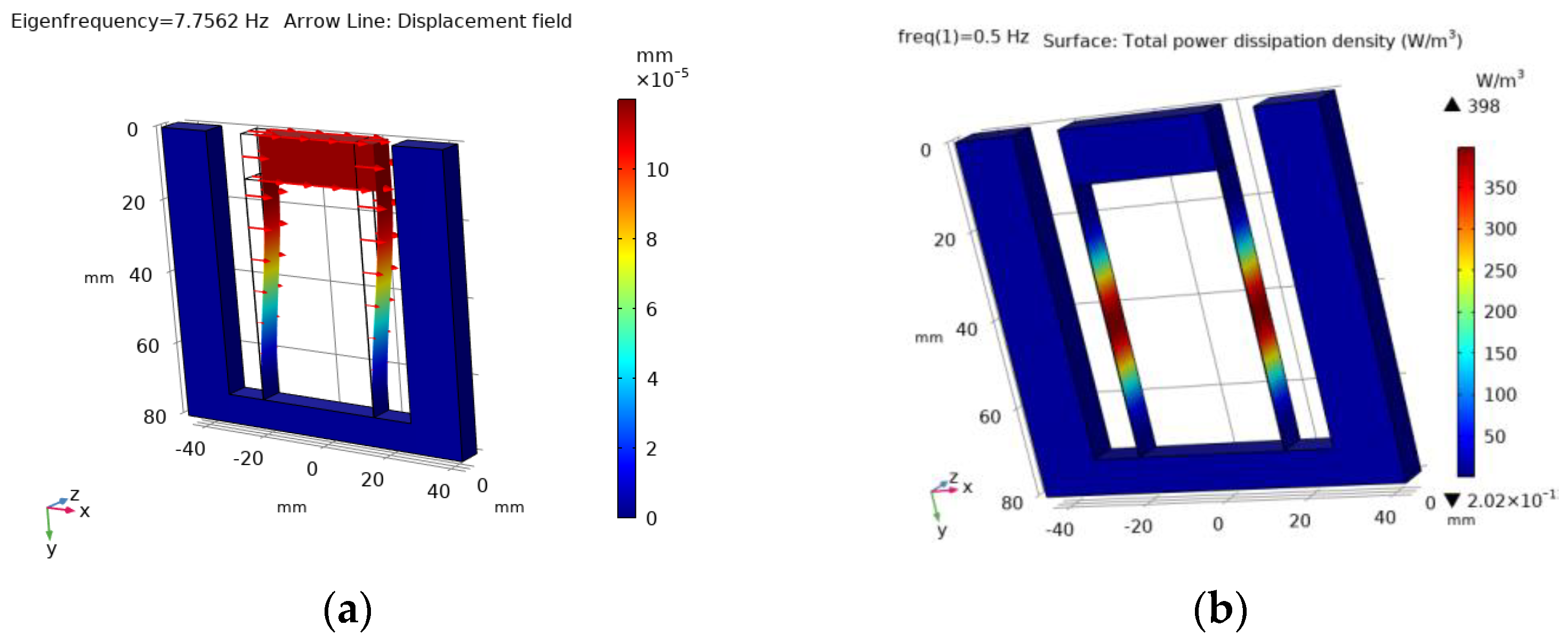
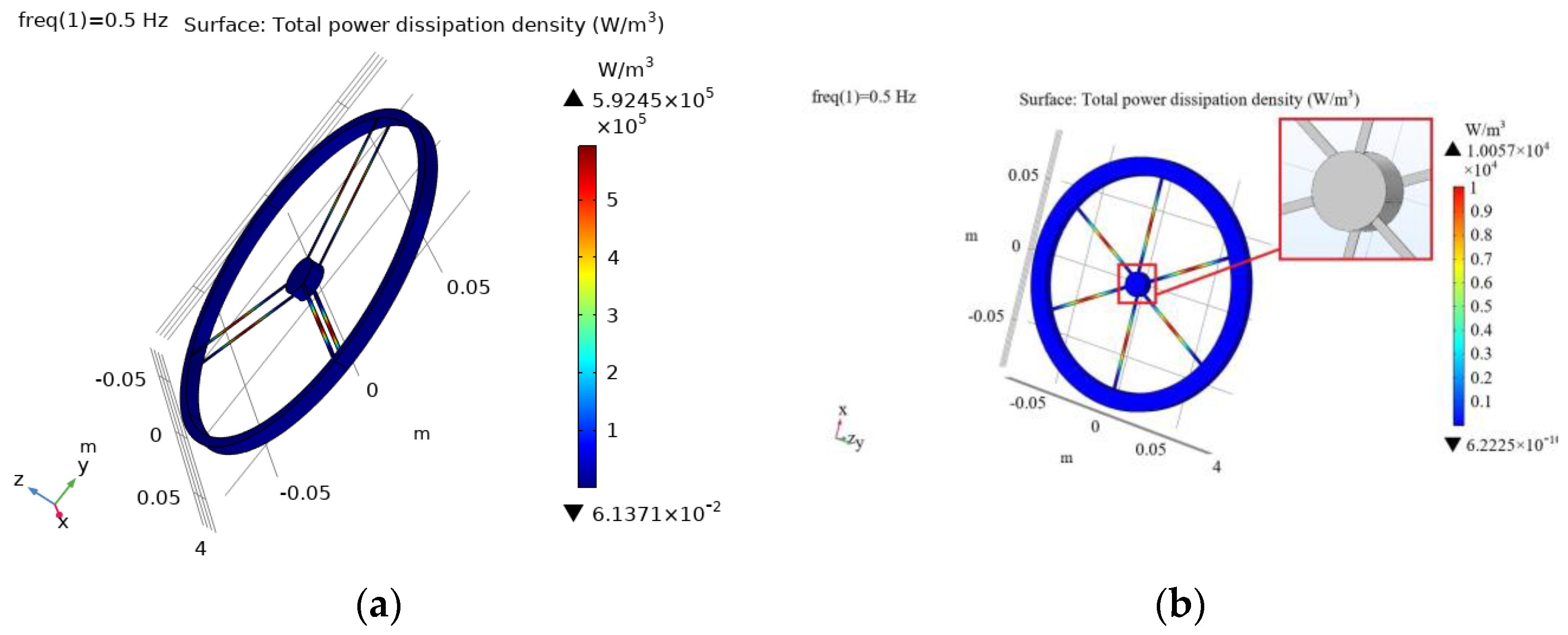
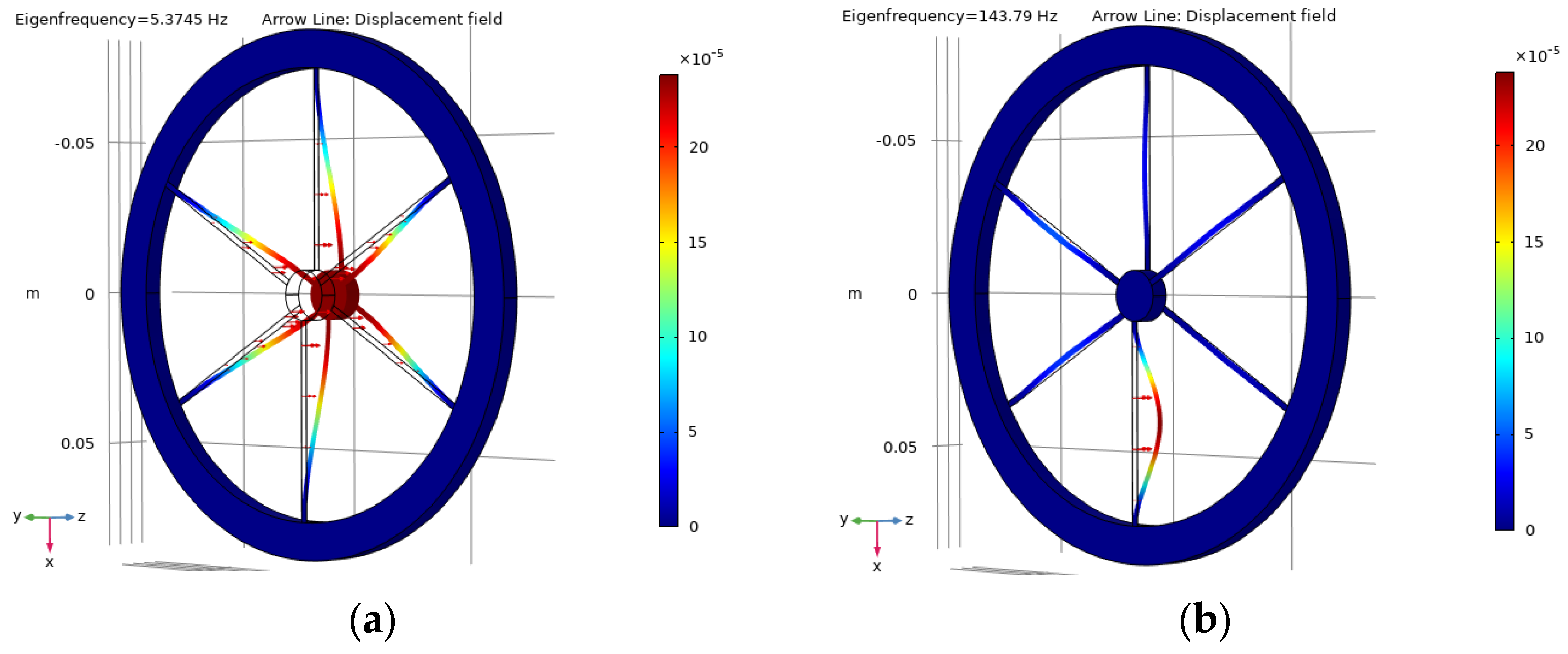
The distribution of losses in such an OMAS is shown in
Figure 17a. To reduce losses, an advanced design is proposed (see
Figure 17b). With the same dimensions of test mass and flexures as for OMAS in
Figure 16, we have very close eigenfrequencies in the case of the OMAS of the improved design (see
Figure 16 and
Figure 18), but power dissipation losses are substantially reduced (see
Figure 17a,b).
The proposed design change in comparison with OMAS from
Figure 13a is that the attachment points of the three flexures connecting the upper parts of the test mass and the constrained outer part of the OMAS are rotated relative to those connecting their lower parts by an angle of 60° so that all flexures are located evenly along the circumference (see callout to
Figure 17b).
4. Conclusions
With the help of the numerical modeling of mechanical processes using the finite element method, the natural frequencies and participation factors of the mechanical parts of optomechanical accelerometers were determined. The simulation was validated by comparing the calculated natural frequencies with the known literature data from [
1,
10]. Using such simulations, an analysis of the mechanical characteristics of optomechanical accelerometers of various designs was carried out. As a result of the analysis of the mechanical characteristics of existing in-plane and out-of-plane accelerometers, new designs of these devices have been proposed, providing their natural frequencies from a few hertz to 50 kHz. Such a variation can be achieved by changing the optomechanical acceleration sensors’ configuration and parameters.
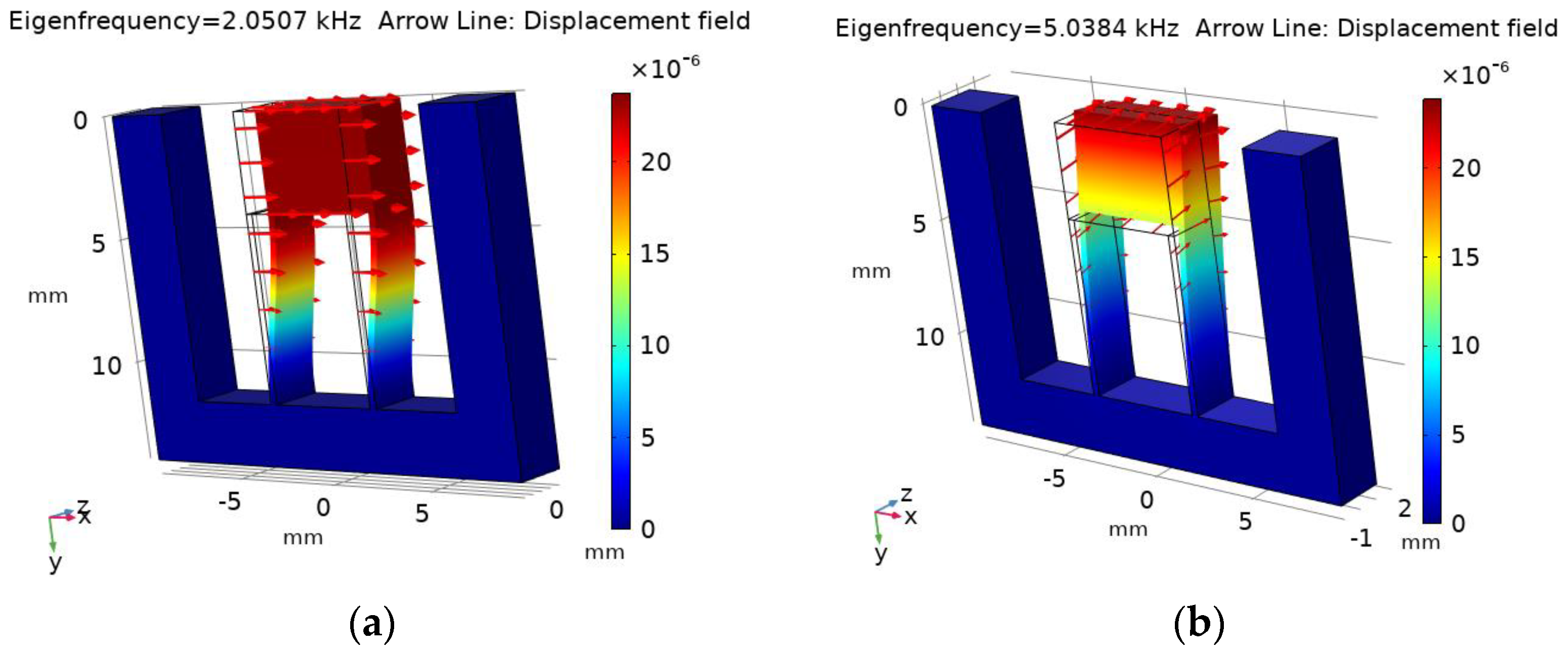
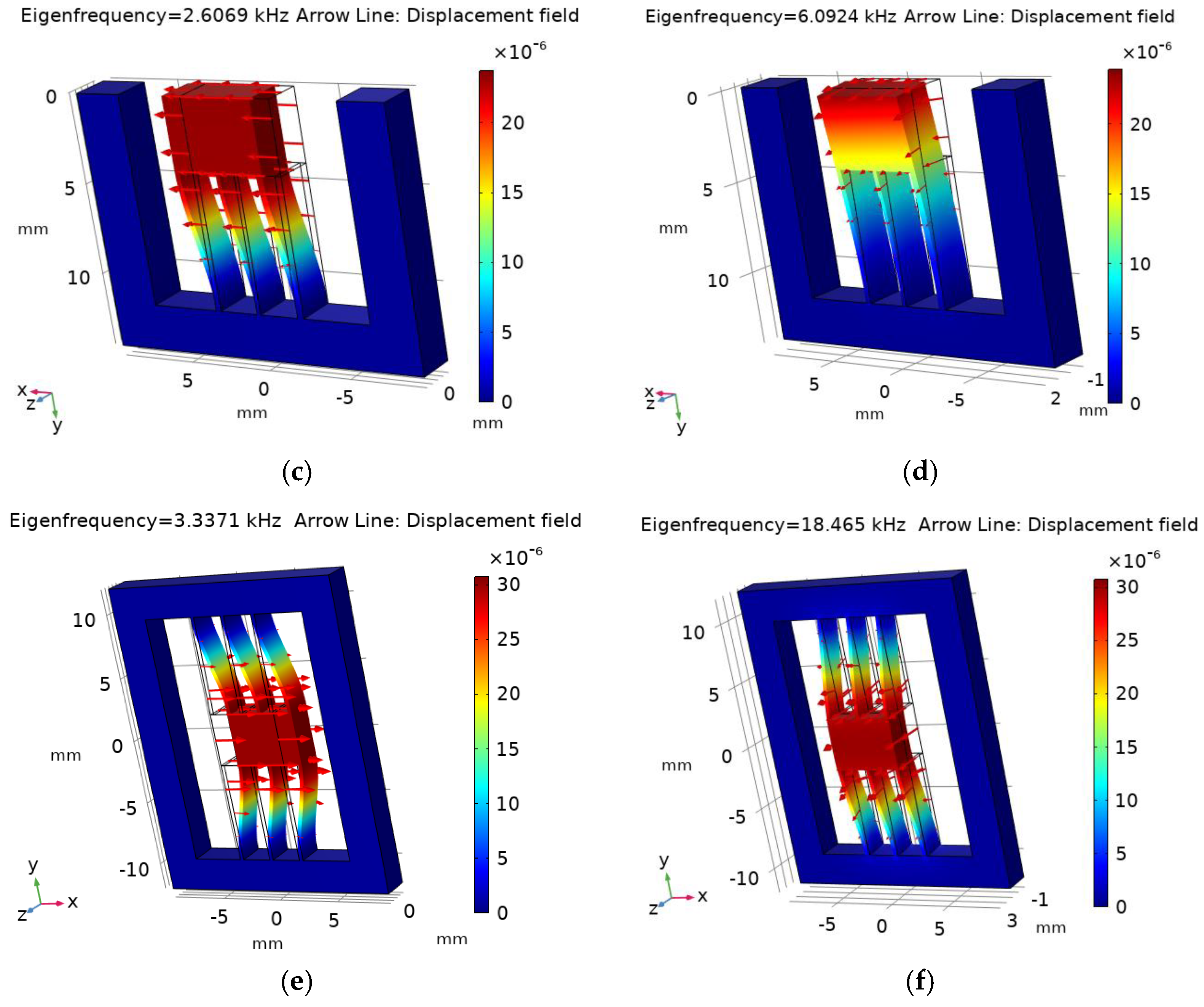
Numerical modeling shows that the existing design of an in-plane OMAS [
1] (see
Figure 1) has a limitation on the maximum first natural frequency, which for the studied parameters of the OMIS does not exceed 10–12 kHz. To overcome this limitation, improved designs have been proposed (see
Figure 9), providing a first eigenfrequency of up to 50 kHz. To ensure the high natural frequencies of in-plane sensors, it is proposed that such OMISs are performed not with two flexures, as in known devices [
1], but with two sets of three flexures, located on both sides of the test mass (see
Figure 9).
For the out-of-plane acceleration measurements, the existing drum-type sensors [
1,
10] provide about 2 kHz natural frequency. The drum-type design sensors providing both very small natural frequencies down to several hertz (see
Figure 16 and
Figure 17) and high natural frequencies up to 50 kHz (see
Figure 13 and
Figure 14) have been proposed. To ensure high natural frequencies of out-of-plane sensors, a design is proposed, in which six flexures are attached through one with one end to the top of the test mass and the other end is attached to the bottom of the outer constrained ring (see
Figure 14a).
The OMASs with the chosen designs for in-plane and out-of-plane measurements practically do not have cross-talk. They also provide a reduction in dissipated power density levels and, therefore, an increase in their reliability and quality factor.
Identifying the participation factors that can be used to describe the motion shape of optical-mechanical sensors allowed us to select vulnerable frequencies for the further studies of possible crosstalk. To eliminate the influence of higher harmonics on the nature of movement, the selected configuration of optical-mechanical sensors must provide either significantly lower levels of participation coefficients of higher harmonics (at least an order of magnitude lower than the participation coefficient of the first natural frequency) in the measurement direction) or significantly higher levels of natural frequencies of higher harmonics (not less than five times the first natural frequency).
Further work is planned in terms of implementing the developed OMAS designs and their experimental investigations.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















