Abstract
The objective of this paper is to study the existence of extremal solutions for nonlinear boundary value problems of fractional differential equations involving the Caputo derivative under integral boundary conditions . Our main results are obtained by applying the monotone iterative technique combined with the method of upper and lower solutions. Further, we consider three cases for as , Caputo, , , and Katugampola (for derivatives and examine the validity of the acquired outcomes with the help of two different particular examples.
Keywords:
extremal solutions; monotone iterative technique; ψ-Caputo fractional derivative; upper and lower solutions MSC:
26A33; 34A08; 34B18
1. Introduction
The notion of fractional calculus refers to the last three centuries and it can be described as the generalization of classical calculus to orders of integration and differentiation that are not necessarily integers. Many researchers have used fractional calculus in different scientific areas [1,2,3,4].
In the literature, various definitions of the fractional-order derivative have been suggested. The oldest and the most famous ones advocate for the use of the Riemann–Liouville and Caputo settings. One of the most recent definitions of a fractional derivative was delivered by Kilbas et al., where the fractional differentiation of a function with respect to another function in the sense of Riemann–Liouville was introduced [5]. They further defined appropriate weighted spaces and studied some of their properties by using the corresponding fractional integral. In [6], Almaida defined the following new fractional derivative and integrals of a function with respect to some other function:
where and
respectively. He called the fractional derivative the Caputo fractional operator. In the above definitions, we get the Riemann–Liouville and Hadamard fractional operators whenever we consider or , respectively. Many researchers used this Caputo fractional derivative (see [7,8,9,10,11,12,13] and the references therein). Abdo et al., in [14], investigated the BVP for a fractional differential equation (FDE) involving operator and was given as
, . For more details on the development of the theory of fractional differential equations, one can refer to [15,16,17,18,19,20]. In order to establish existence theory, researchers have used diverse techniques of nonlinear analysis consisting of fixed-point theory, hybrid fixed-point theory, topological degree theory, and measure of noncompactness [21,22,23,24]. However, the use of the monotone iterative technique () along with the method of upper and lower solutions (u-l solutions) for solving a BVP involving the operator remains rare.
In the present paper, we are interested in the blended with the method of upper and lower solutions to prove the existence of extremal solutions for the following BVP of an FDE involving the operator
where is the operator (1) of order , is the operator (2), the function is continuous, and are real constants, and . It is worth mentioning that the is efficiently used in the literature to investigate the existence of extremal solutions to many applied problems of nonlinear equations [25,26,27,28,29,30,31,32,33,34,35,36,37,38].
The rest of this paper is organized as follows. In Section 2, we recall some preliminary concepts, definitions, and lemmas that will act as prerequisites to proving the main results. The main results are stated and proved in Section 3. Finally, we give numerical examples to illustrate the correctness of the outcome.
2. Preliminaries
Let . The left-sided Riemann–Liouville fractional integral (l-s--RLfi) of order for an integrable function with respect to another function , which is an increasing differentiable function such that , is defined as follows:
where is the classical Euler Gamma function [5,6]. Appendix A Algorithm A1 shows the MATLAB lines for the calculation of the l-s--RLfi. Let and , be two functions such that is increasing and . The left-sided Riemann–Liouville fractional derivative (l-s--RLfd) of a function of order is defined by
where [6]. Appendix A Algorithm A2 shows the MATLAB lines for the calculation of the l-s--RLfd. In addition, the left-sided Caputo fractional derivative (l-s--Cfd) of a function of order is defined by
where are two functions such that is increasing, , and and whenever and , respectively [6]. To simplify the notation, we use:
So,
Appendix A Algorithm A3 shows the MATLAB lines for the calculation of . If , then the Cfd of order of is determined as ([6], Theorem 3):
Lemma 1
([8]). Let and . Then, . In particular, if , then .
Lemma 2
([8]). Let . If , then , and
whenever , .
Lemma 3
([5,8]). Let and Then,
- (1)
- ;
- (2)
- ;
- (3)
- and .
3. Main Results
First, we start the following key fixed-point theorem.
Theorem 1
([16,17]). Consider of an ordered Banach space and a nondecreasing mapping . If each sequence converges whenever is a monotone sequence in ı, then the sequence of the -iteration of converges to the least fixed point of , and the sequence of the -iteration of converges to the greatest fixed point of . Moreover, , and
In fact, a function is said to be a solution of Equation (3) if satisfies the equation and the condition . Now, we prove the the next key lemma of a solution for problem (3).
Lemma 4.
Let and ; the linear fractional initial value problem
has the following unique solution:
where
Proof.
Assume that satisfies (9). Then, Lemma 2 implies that
The condition of problem (9) implies that and
Thus,
Consequently,
Finally, we obtain the solution (10):
which completes the proof. □
Lemma 5
(Comparison result). Let satisfy the following inequalities:
Then, , where is fixed.
Proof.
Definition 1.
A function and is said to be a lower solution (l-solution) and upper solution (u-solution) of problem (3) if it satisfies
, respectively.
Theorem 2.
Consider the function and the following assumptions:
- (H1)
- , such that and are the l-solution and u-solution of problem (3), respectively, with ;
- (H2)
- ∃ a function such that , for ;
- (H3)
- and .
Then, there exist monotone iterative sequences () and that converge uniformly on the interval ı to the extremal solutions , respectively, of BVP (3), where
Proof.
First, for any , , we consider the BVPs of fractional order
and
. Now, Lemma 4 implies that (15) and (16) have the following unique solutions:
and
for . Then, we structure the proof as follows. For any , define an operator with . As a first step, we show that the operator . Let , . Then, , are well defined and satisfy
and
We set . From (15) and Definition 1, we get
Again, since , by Lemma 5, . That is,
Similarly, using the definition of the upper solution, we can show that . Now, let . From (15), (16), and , we have
Therefore,
Moreover, from Lemma 5. Thus, . This, together with and , implies that is nondecreasing,
and for any . In consequence, and
Let be an in . Then, and . For any , there exists a positive constant such that . Then, for any with we obtain
which converges to zero as . Let us observe that for ,
when Thus, is equicontinuous on all ȷ. So, is relatively compact on . Hence, the Arzelá–Ascoli theorem implies that is compact on , and so,
converges. On the other hand, Theorem 1 implies that the sequence of the -iteration of and converges to the least and the greatest fixed points and of , respectively. This, in turn, implies that problem (3) has extremal solutions , which can be obtained with the corresponding iterative sequences defined in (17) and (18), respectively. Furthermore, we have
This completes the proof. □
4. Some Relevant Examples
Example 1.

Consider the following problem:
where
and is given by
for , . We take as the lower solution and as the upper solution of problem (21), and we take for . So, of Theorem 2 holds. Now, we consider three cases for :
Note that and give the Caputo and Katugampola (for ) derivatives in this example.
Table 1.
Numerical results of for in Example 1.
Table 2.
Numerical results of for in Example 1.
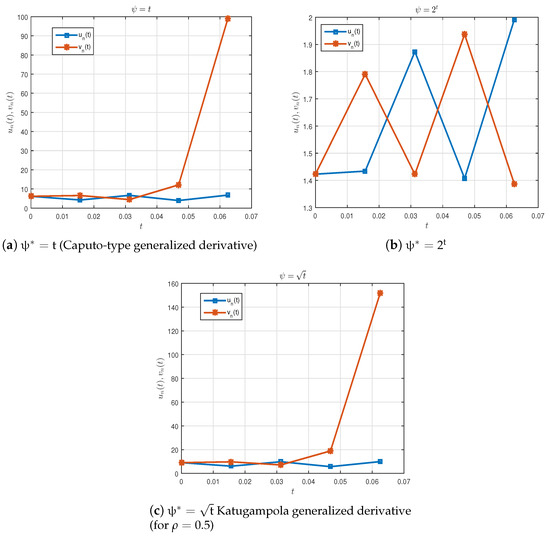
Table 1 and Table 2 show these results. One can see the 2D line plots of and for the Caputo derivative, , and the Katugampola derivative (for ) in Figure 1a,b. In addition, assumption is clearly satisfied.
Figure 1.
Graphical representation of and in (a) and (b) respectively for the Caputo derivative, , and the Katugampola derivative (for ) in Example 1.
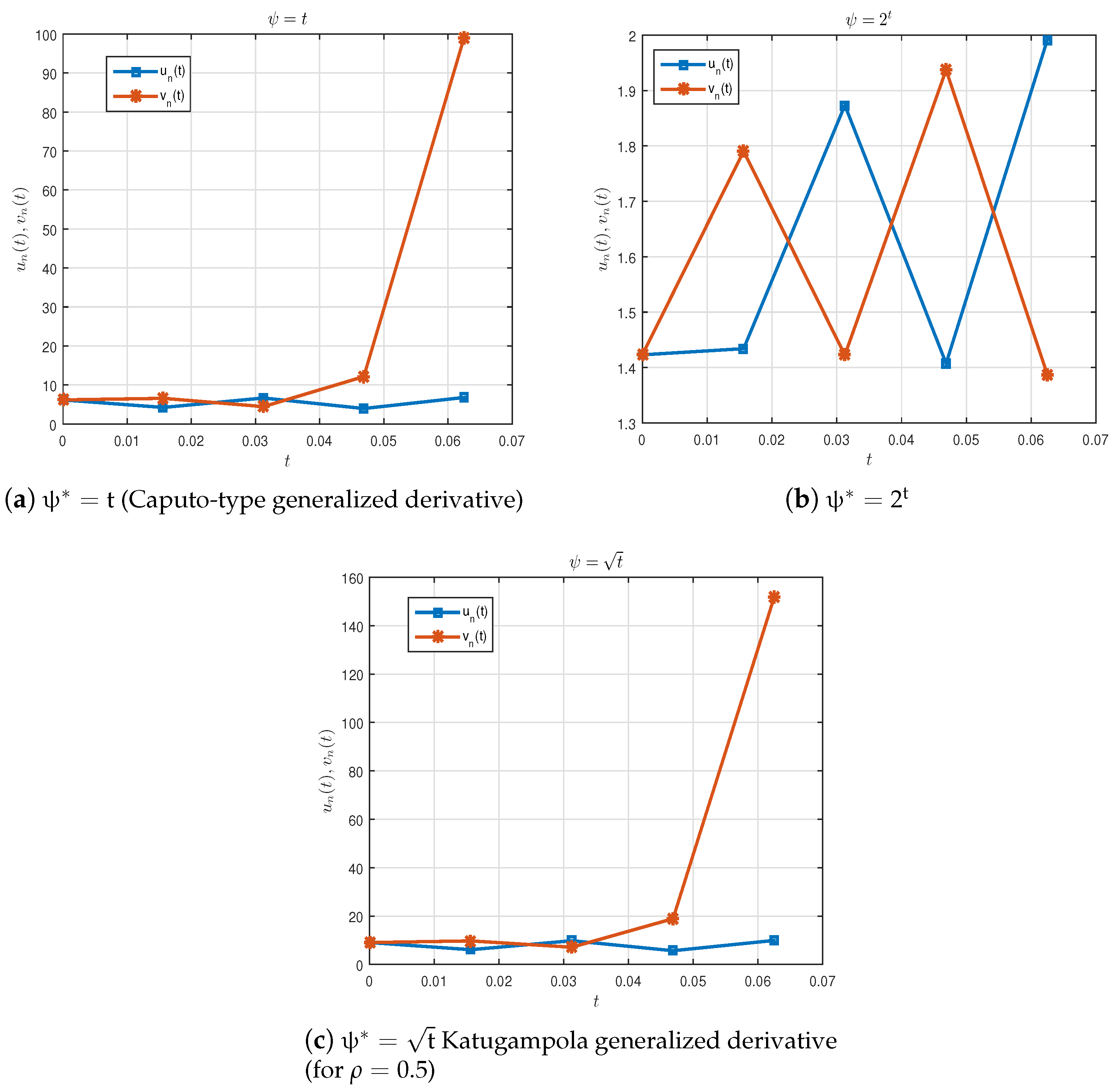
Thus, by Theorem 2, it follows that problem (21) has extremal solutions , , which can be found by means of the iterative sequences and defined by (17) and (18), respectively, as follows:
and
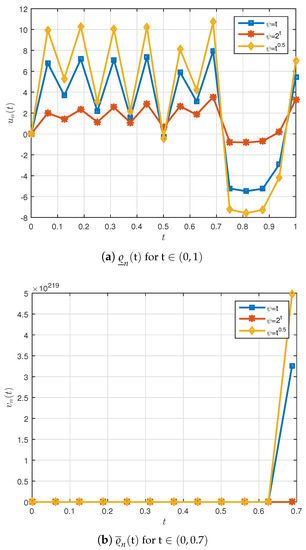
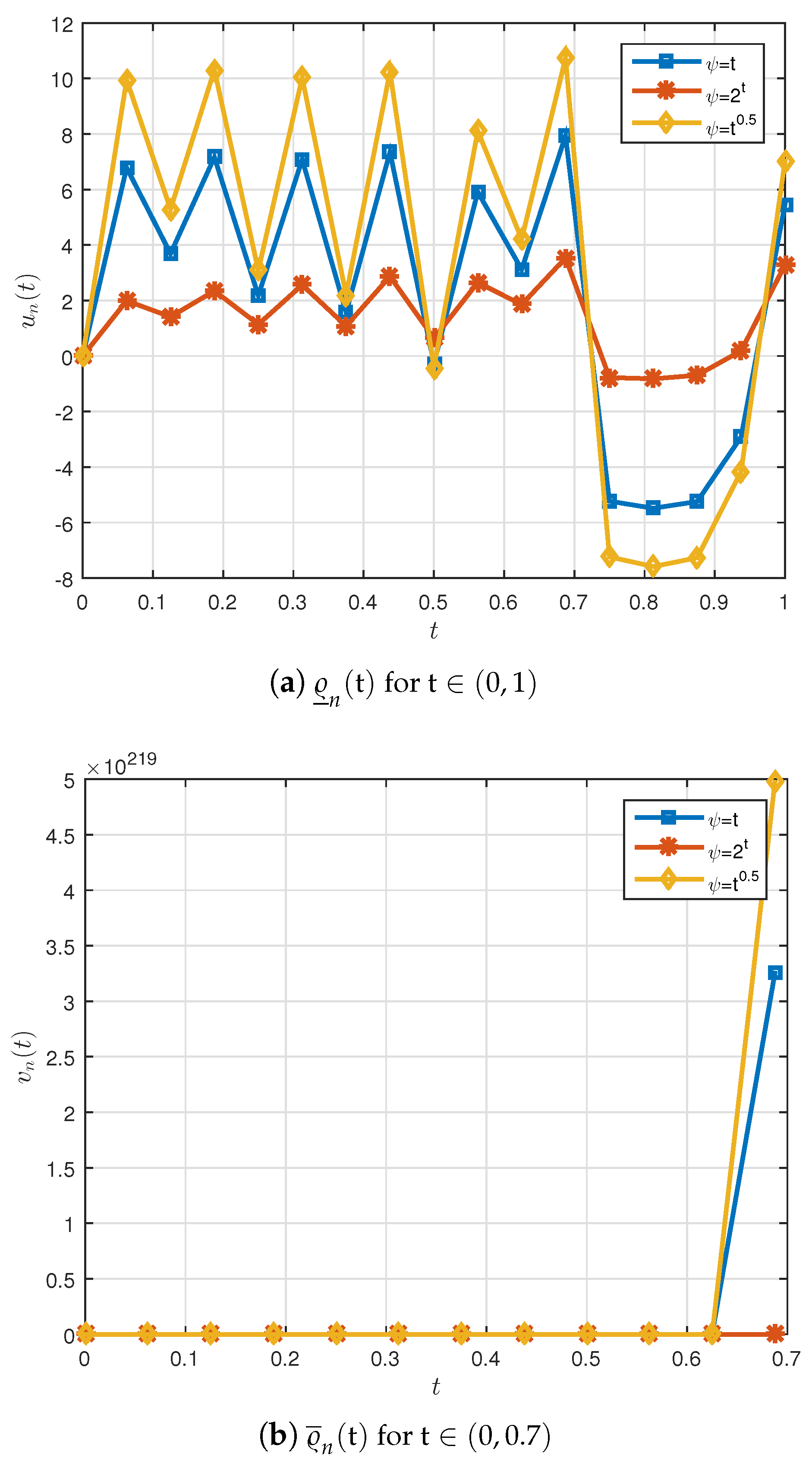
One can see the 2D line plots of and for the Caputo derivative, , and the Katugampola derivative (for ) in Figure 2a–c. Appendix A Algorithm A4 shows how to calculate and for .
Figure 2.
Graphical representation of and in (a), (b) and (c) respectively for the Caputo derivative, , and the Katugampola derivative (for ) and in Example 1.
Example 2.
Consider the following problem:
where
and is given by
for , . We take as the l-solution and as the u-solution of problem (21), and we take for . So, of Theorem 2 holds. Now, we consider three cases for :
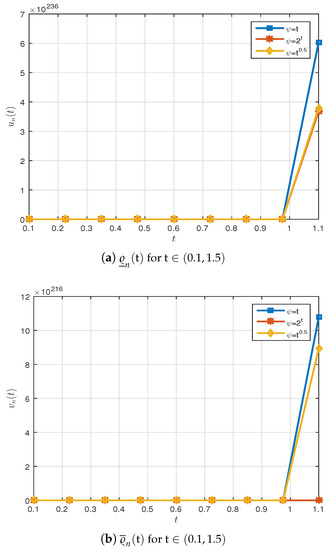
Note that and give the Caputo and Katugampola (for derivatives in this example. These results are plotted in Figure 3a,b.
Figure 3.
Graphical representation of and in (a) and (b) respectively for the Caputo derivative, , and the Katugampola derivative (for ) in Example 2.
With the data provided, we can see from assumption that
Table 3 and Table 4 show these results. One can see the 2D line plots of and for the Caputo derivative, , and the Katugampola derivative (for ) in Figure 3a,b. Further, assumption is clearly satisfied. Thus, by Theorem 2, it follows that problem (22) has extremal solutions , , which can be found by means of the iterative sequences and defined by (17) and (18), respectively, as follows:
and
Table 3.
Numerical results of for in Example 2.
Table 4.
Numerical results of for in Example 2.
One can see the 2D line plots of and for the Caputo derivative, , , and the Katugampola derivative (for ) in Figure 3a,b. Appendix A Algorithm A4 shows how to calculate and for .
5. Conclusions
In this study, we investigated the existence of solutions for a nonlinear FDE in the frame of the Caputo derivative with integral boundary conditions. To prove the main theorems, the monotone iterative and the upper–lower solution techniques in the sense of the Caputo fractional operator were used. Based on certain conditions, we constructed that uniformly converged to the extremal solutions of BVP. The results were tested by constructing two equations corresponding to BVP (3). Different values for , such as the , Caputo, , , and Katugampola (for derivatives and the upper and lower solutions, were examined and illustrated for the purpose of verification. We conclude that the results reported in this paper are of great significance for the relevant audience and can be applied to different types of fractional differential problems.
Author Contributions
Conceptualization, A.B. and M.B.; methodology, J.A.; software, M.E.S.; validation, A.B., M.B. and M.E.S.; formal analysis, M.E.S.; investigation, A.B.; resources, M.B.; data curation, M.E.S.; writing—original draft preparation, A.B.; writing—review and editing, M.E.S.; visualization, M.E.S.; supervision, J.A.; project administration, J.A.; funding acquisition, J.A. All authors have read and agreed to the published version of the manuscript.
Funding
Not applicable.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
J. Alzabut is thankful to Prince Sultan University and OSTİM Technical University for their endless support.
Conflicts of Interest
The authors declare that they have no competing interests.
Appendix A. Supporting Informations
| Algorithm A1 MATLAB lines for the calculation of in Equation (4). |
| 1: LSfractionalintegral
Require: 2: syms ; 3: E = ; 4: mathbbI = ; 5: return mathbbI |
| Algorithm A2 MATLAB lines for the calculation of in Equation (5). |
| 1: LSfractionalderivative |
| Require |
| 2: syms ; |
| 3: ; |
| 4: ; |
| 5: ; |
| 6: ; |
| 7: ; |
| 8: mathbbD = F; |
| 9: return mathbbD |
| Algorithm A3 MATLAB lines for the calculation of in Equation (6). |
| 1: LSCaputofractionalderivative |
| Require: |
| 2: syms ; |
| 3: ; |
| 4: if then |
| 5: ; |
| 6: ; |
| 7: else |
| 8: ; |
| 9: ; |
| 10: end if |
| 11: mathbbD = E; |
| 12: return mathbbD |
| Algorithm A4 MATLAB lines for the calculation of and in Example 1. |
| Require: |
| 1: syms ; |
| 2: clear; |
| 3: format long; |
| 4: syms ; |
| 5: ; ; ; ; ; |
| 6: ; ; |
| 7: ; ; |
| 8: ; |
| 9: |
| 10: ; ; |
| 11: ; |
| 12: ; ; |
| 13: for i = 1 to 3 do |
| 14: ; |
| 15: ; |
| 16: ; |
| 17: ; |
| 18: ; |
| 19: ; |
| 20: ; |
| 21: ; |
| 22: ; |
| 23: ; |
| 24: ; |
| 25: ; |
| 26: ; |
| 27: while do |
| 28: ; |
| 29: ; |
| 30: ; |
| 31: ; |
| 32: ; |
| 33: ; |
| 34: ; |
| 35: ; |
| 36: ; |
| 37: ; |
| 38: ; |
| 39: end while |
| 40: ; |
| 41: end for |
| 42: return |
References
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Oldham, K.B. Fractional differential equations in electrochemistry. Adv. Eng. Softw. 2010, 41, 9–12. [Google Scholar] [CrossRef]
- Sabatier, J.; Agrawal, O.P.; Machado, J.A.T. Advances in Fractional Calculus-Theoretical Developments and Applications in Physics and Engineering; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar]
- Tarasov, V.E. Fractional Dynamics: Application of Fractional Calculus to Dynamics of Particles, Fields and Media; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science B.V.: Amsterdam, The Netherlands, 2006; Volune 204. [Google Scholar]
- Almeida, R. A Caputo fractional derivative of a function with respect to another function. Commun. Nonlinear Sci. Numer. Simul. 2017, 44, 460–481. [Google Scholar] [CrossRef] [Green Version]
- Alzabut, J.; Selvam, A.G.M.; El-Nabulsi, R.A.; Dhakshinamoorthy, V.; Samei, M.E. Asymptotic Stability of Nonlinear Discrete Fractional Pantograph Equations with Non-Local Initial Conditions. Symmetry 2021, 13, 473. [Google Scholar] [CrossRef]
- Almeida, R.; Malinowska, A.B.; Monteiro, M.T.T. Fractional differential equations with a Caputo derivative with respect to a kernel function and their applications. Math. Meth. Appl. Sci. 2018, 41, 336–352. [Google Scholar] [CrossRef] [Green Version]
- Almeida, R.; Jleli, M.; Samet, B. A numerical study of fractional relaxation-oscillation equations involving ψ-Caputo fractional derivative. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. RACSAM 2019, 113, 1873–1891. [Google Scholar] [CrossRef]
- Baitiche, Z.; Derbazi, C.; Alzabut, J.; Samei, M.E.; Kaabar, M.K.A.; Siri, Z. Monotone Iterative Method for Langevin Equation in Terms of ψ-Caputo Fractional Derivative and Nonlinear Boundary Conditions. Fractal Fract. 2021, 5, 81. [Google Scholar] [CrossRef]
- Samei, M.; Hedayati, V.; Rezapour, S. Existence results for a fraction hybrid differential inclusion with Caputo-Hadamard type fractional derivative. Adv. Differ. Equations 2019, 2019, 163. [Google Scholar] [CrossRef]
- Adjabi, Y.; Samei, M.E.; Matar, M.M.; Alzabut, J. Langevin differential equation in frame of ordinary and Hadamard fractional derivatives under three point boundary conditions. AIMS Math. 2021, 6, 2796–2843. [Google Scholar] [CrossRef]
- Samet, B.; Aydi, H. Lyapunov-type inequalities for an anti-periodic fractional boundary value problem involving ψ-Caputo fractional derivative. J. Inequal. Appl. 2018, 2018, 286. [Google Scholar] [CrossRef] [Green Version]
- Abdo, M.S.; Panchal, S.K.; Saeed, A.M. Fractional boundary value problem with ψ-Caputo fractional derivative. Proc. Math. Sci. 2019, 129, 14. [Google Scholar] [CrossRef]
- Abbas, S.; Benchohra, M.; N’Guŕékata, G.M. Topics in Fractional Differential Equations; Springer: New York, NY, USA, 2015. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to Fractional Calculus and Fractional Differential Equations; Academic Press: New York, NY, USA, 1993. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Zhou, Y. Basic Theory of Fractional Differential Equations; World Scientific: Singapore, 2014. [Google Scholar]
- Agarwal, R.P.; Benchohra, M.; Hamani, S. A survey onexistence results for boundary value problems of nonlinear fractional differential equations and inclusions. Acta Appl. Math. 2010, 109, 973–1033. [Google Scholar] [CrossRef]
- Benchohra, M.; Graef, J.R.; Hamani, S. Existence results for boundary value problems with non-linear fractional differential equations. Appl. Anal. 2008, 87, 851–863. [Google Scholar] [CrossRef]
- Abbas, S.; Benchohra, M.; Hamidi, N.; Henderson, J. Caputo–Hadamard fractional differential equations in Banach spaces. Fract. Calc. Appl. Anal. 2018, 21, 1027–1045. [Google Scholar] [CrossRef]
- Boutiara, A.; Guerbati, K.; Benbachir, M. Caputo-Hadamard fractional differential equation with three-point boundary conditions in Banach spaces. AIMS Math. 2020, 5, 259–272. [Google Scholar]
- Aghajani, A.; Pourhadi, E.; Trujillo, J.J. Application of measure of noncompactness to a Cauchy problem for fractional differential equations in Banach spaces. Fract. Calc. Appl. Anal. 2013, 16, 962–977. [Google Scholar] [CrossRef]
- Kucche, K.D.; Mali, A.D.; Sousa, J.V.C. On the nonlinear Ψ-Hilfer fractional differential equations. Comput. Appl. Math. 2019, 38, 25. [Google Scholar] [CrossRef]
- Zhang, L.; Ahmad, B.; Wang, G. Explicit iterations and extremal solutions for fractional differential equations with nonlinear integral boundary conditions. Appl. Math. Comput. 2015, 268, 388–392. [Google Scholar] [CrossRef]
- Derbazi, C.; Baitiche, Z.; Benchohra, M.; Cabada, A. Initial Value Problem For Nonlinear Fractional Differential Equations With ψ-Caputo Derivative Via Monotone Iterative Technique. Axioms 2020, 9, 57. [Google Scholar] [CrossRef]
- Ali, S.; Shah, K.; Jarad, F. On stable iterative solutions for a class of boundary value problem of nonlinear fractional order differential equations. Math. Methods Appl. Sci. 2019, 42, 969–981. [Google Scholar] [CrossRef]
- Al-Refai, M.; Hajji, M.A. Monotone iterative sequences for nonlinear boundary value problems of fractional order. Nonlinear Anal. 2011, 74, 3531–3539. [Google Scholar] [CrossRef]
- Alsaedi, A.; Ahmad, B.; Alghanmi, M. Extremal solutions for generalized Caputo fractional differential equations with Steiltjes-type fractional integro-initial conditions. Appl. Math. Lett. 2019, 91, 113–120. [Google Scholar] [CrossRef]
- Chen, C.; Bohner, M.; Jia, B. Method of upper and lower solutions for nonlinear Caputo fractional difference equations and its applications. Fract. Calc. Appl. Anal. 2019, 22, 1307–1320. [Google Scholar] [CrossRef]
- Dhaigude, D.; Rizqan, B. Existence and uniqueness of solutions of fractional differential equations with deviating arguments under integral boundary conditions. Kyungpook Math. J. 2019, 59, 191–202. [Google Scholar]
- Fazli, H.; Sun, H.; Aghchi, S. Existence of extremal solutions of fractional Langevin equation involving nonlinear boundary conditions. Int. J. Comput. Math. 2020, 2020, 1720662. [Google Scholar] [CrossRef]
- Lin, X.; Zhao, Z. Iterative technique for a third-order differential equation with three-point nonlinear boundary value conditions. Electron. J. Qual. Theory Differ. Equ. 2016, 12, 10. [Google Scholar] [CrossRef]
- Mao, J.; Zhao, Z.; Wang, C. The unique iterative positive solution of fractional boundary value problem with q-difference. Appl. Math. Lett. 2020, 100, 106002. [Google Scholar] [CrossRef]
- Meng, S.; Cui, Y. The extremal solution to conformable fractional differential equations involving integral boundary condition. Mathematics 2019, 7, 186. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Sudsutad, W.; Zhang, L.; Tariboon, J. Monotone iterative technique for a nonlinear fractional q-difference equation of Caputo type. Adv. Diff. Equ. 2016, 2016, 211. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S. Monotone iterative method for initial value problem involving Riemann-Liouville fractional derivatives. Nonlinear Anal. 2009, 71, 2087–2093. [Google Scholar] [CrossRef]
- Eswari, R.; Alzabut, J.; Samei, M.E.; Zhou, H. On periodic solutions of a discrete Nicholson’s dual system with density-dependent mortality and harvesting terms. Adv. Differ. Equations 2021, 2021, 360. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).