
Avoiding Dynamical Degradation in Computer Simulation of Chaotic Systems Using Semi-Explicit Integration: Rössler Oscillator Case



Abstract
:1. Introduction
- the new technique for extending the period of chaotic sequences is given;
- the proposed method does not introduce additional perturbations to the chaotic oscillations in comparison with traditional methods based on switching nonlinearity parameters;
- the considered approach can be implemented in embedded systems without using additional hardware resources.
2. Materials and Methods
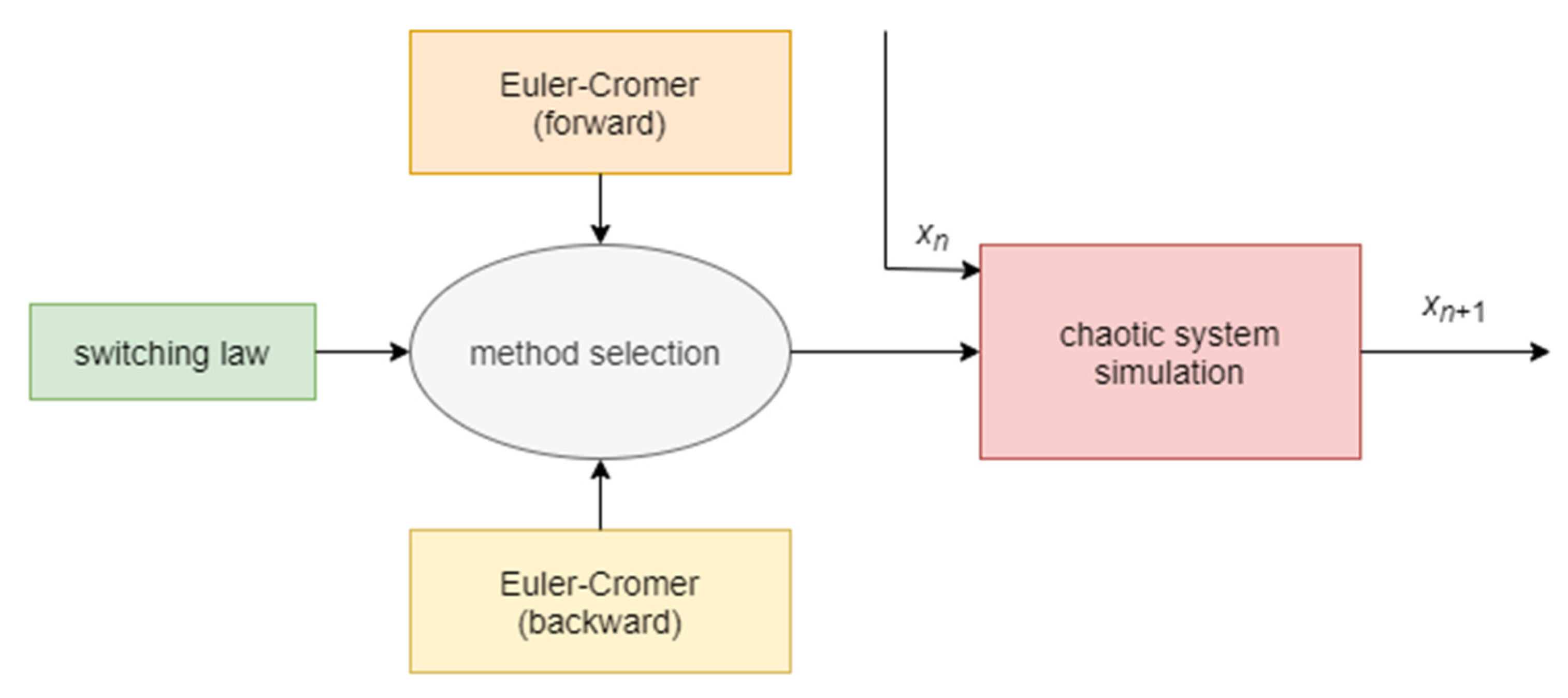
2.1. Semi-Explicit Integration
2.2. Perturbation Technique
3. Experimental Results
3.1. Comparison with Known Perturbation Techniques
3.2. Comparison with Other Finite-Difference Schemes
4. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Kamdjeu, K.L.; Kamdeu, N.Y.P.; Mboupda, P.J.R.; Tiedeu, A.; Fotsin, H.B. Image encryption using a novel quintic jerk circuit with adjustable symmetry. Int. J. Circ. Theor. Appl. 2021, 49, 1470–1501. [Google Scholar] [CrossRef]
- Meleshenko, P.A.; Semenov, M.E.; Klinskikh, A.F. Conservative chaos in a simple oscillatory system with non-smooth nonlinearity. Nonlinear Dyn. 2020, 101, 2523–2540. [Google Scholar] [CrossRef]
- García-Guerrero, E.E.; Inzunza-González, E.; López-Bonilla, O.R.; Cárdenas-Valdez, J.R.; Tlelo-Cuautle, E. Randomness improvement of chaotic maps for image encryption in a wireless communication scheme using PIC-microcontroller via Zigbee channels. Chaos Solitons Fractals 2020, 133, 109646. [Google Scholar] [CrossRef]
- Tutueva, A.V.; Karimov, T.I.; Andreev, V.S.; Zubarev, A.V.; Rodionova, E.A.; Butusov, D.N. Synchronization of Chaotic Systems via Adaptive Control of Symmetry Coefficient in Semi-Implicit Models. In Proceedings of the 2020 Ural Smart Energy Conference (USEC), Ekaterinburg, Russia, 13–15 November 2020; pp. 143–146. [Google Scholar]
- Chen, C.; Min, F.; Zhang, Y.; Bao, B. Memristive Electromagnetic Induction Effects on Hopfield Neural Network. Nonlinear Dyn. 2020, 1–18. [Google Scholar] [CrossRef]
- Wang, R.; Li, C.; Çiçek, S.; Rajagopal, K.; Zhang, X. A memristive hyperjerk chaotic system: Amplitude control, FPGA design, and prediction with artificial neural network. Complexity 2021, 2021, 6636813. [Google Scholar] [CrossRef]
- Ayubi, P.; Barani, M.J.; Valandar, M.Y.; Irani, B.Y.; Sadigh, R.S.M. A new chaotic complex map for robust video watermarking. Artif. Intell. Rev. 2021, 54, 1237–1280. [Google Scholar] [CrossRef]
- Ayubi, P.; Setayeshi, S.; Rahmani, A.M. Deterministic chaos game: A new fractal based pseudo-random number generator and its cryptographic application. J. Inf. Secur. Appl. 2020, 52, 102472. [Google Scholar] [CrossRef]
- Macovei, C.; Lupu, A.E.; Răducanu, M.; Datcu, O. Key extraction in a chaos-based image cipher and wavelet packets. In Proceedings of the Advanced Topics in Optoelectronics, Microelectronics and Nanotechnologies X, online, 31 December 2020; Volume 11718, p. 117182J. [Google Scholar]
- Alawida, M.; Samsudin, A.; Alajarmeh, N.; Teh, J.S.; Ahmad, M. A Novel Hash Function Based on a Chaotic Sponge and DNA Sequence. IEEE Access 2021, 9, 17882–17897. [Google Scholar] [CrossRef]
- Moysis, L.; Rajagopal, K.; Tutueva, A.V.; Volos, C.; Teka, B.; Butusov, D.N. Chaotic Path Planning for 3D Area Coverage Using a Pseudo-Random Bit Generator from a 1D Chaotic Map. Mathematics 2021, 9, 1821. [Google Scholar] [CrossRef]
- Petavratzis, E.; Moysis, L.; Volos, C.; Stouboulos, I.; Nistazakis, H.; Valavanis, K. A chaotic path planning generator enhanced by a memory technique. Rob. Auton. Syst. 2021, 143, 103826. [Google Scholar] [CrossRef]
- Karimov, T.; Nepomuceno, E.G.; Druzhina, O.; Karimov, A.; Butusov, D. Chaotic oscillators as inductive sensors: Theory and practice. Sensors 2019, 19, 4314. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Butusov, D.; Karimov, T.; Voznesenskiy, A.; Kaplun, D.; Andreev, V.; Ostrovskii, V. Filtering techniques for chaotic signal processing. Electronics 2018, 7, 450. [Google Scholar] [CrossRef] [Green Version]
- Mali, O.; Neittaanmäki, P.; Repin, S. Errors Arising in Computer Simulation Methods in Accuracy Verification Methods. Comput. Methods Appl. Sci. 2014, 1–5. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Y.; Song, S.; Cao, L.; Liu, J.; Harkin, J. Counteracting dynamical degradation of digital chaotic Chebyshev map via perturbation. Int. J. Bifurc. Chaos 2017, 27, 1750033. [Google Scholar] [CrossRef]
- Persohn, K.J.; Povinelli, R.J. Analyzing logistic map pseudorandom number generators for periodicity induced by finite precision floating-point representation. Chaos Solitons Fractals 2012, 45, 238–245. [Google Scholar] [CrossRef]
- Liu, L.; Xiang, H.; Li, X. A novel perturbation method to reduce the dynamical degradation of digital chaotic maps. Nonlinear Dyn. 2021, 103, 1099–1115. [Google Scholar] [CrossRef]
- Liu, L.; Liu, B.; Hu, H.; Miao, S. Reducing the dynamical degradation by bi-coupling digital chaotic maps. Int. J. Bifurc. Chaos 2018, 28, 1850059. [Google Scholar] [CrossRef]
- Fan, C.; Ding, Q.; Tse, C.K. Counteracting the dynamical degradation of digital chaos by applying stochastic jump of chaotic orbits. Int. J. Bifurc. Chaos 2019, 29, 1930023. [Google Scholar] [CrossRef]
- Tang, J.; Yu, Z.; Liu, L. A delay coupling method to reduce the dynamical degradation of digital chaotic maps and its application for image encryption. Multimed. Tools Appl. 2019, 78, 24765–24788. [Google Scholar] [CrossRef]
- Chen, C.; Sun, K.; Peng, Y.; Alamodi, A.O. A novel control method to counteract the dynamical degradation of a digital chaotic sequence. Eur. Phys. J. Plus 2019, 134, 1–16. [Google Scholar] [CrossRef]
- Liu, L.; Hu, H.; Deng, Y. An analogue–digital mixed method for solving the dynamical degradation of digital chaotic systems. IMA J. Math. Control Inf. 2015, 32, 703–716. [Google Scholar] [CrossRef]
- Tutueva, A.; Pesterev, D.; Karimov, A.; Butusov, D.; Ostrovskii, V. Adaptive Chirikov Map for Pseudo-random Number Generation in Chaos-based Stream Encryption. In Proceedings of the 2019 25th Conference of Open Innovations Association (FRUCT), Helsinki, Finland, 5–8 November 2019; pp. 333–338. [Google Scholar]
- Merah, L.; Lorenz, P.; Adda, A.P. A New and Efficient Scheme for Improving the Digitized Chaotic Systems from Dynamical Degradation. IEEE Access 2021, 9, 88997–89008. [Google Scholar] [CrossRef]
- Alvarez, G.; Li, S. Some basic cryptographic requirements for chaos-based cryptosystems. Int. J. Bifurc. Chaos 2006, 16, 2129–2151. [Google Scholar] [CrossRef] [Green Version]
- Butusov, D.N.; Pesterev, D.O.; Tutueva, A.V.; Kaplun, D.I.; Nepomuceno, E.G. New technique to quantify chaotic dynamics based on differences between semi-implicit integration schemes. Commun. Nonlinear Sci. Numer. Simul. 2021, 92, 105467. [Google Scholar] [CrossRef]
- Simion, A.G.; Andronache, I.; Ahammer, H.; Marin, M.; Loghin, V.; Nedelcu, I.D.; Jelinek, H.F. Particularities of Forest Dynamics Using Higuchi Dimension. Parâng Mountains as a Case Study. Fractal. Fract. 2021, 5, 96. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Huang, M.; Yin, H.; Jiang, K.; Xiao, K.; Tang, S. Influence of Different Alkali Sulfates on the Shrinkage, Hydration, Pore Structure, Fractal Dimension and Microstructure of Low-Heat Portland Cement, Medium-Heat Portland Cement and Ordinary Portland Cement. Fractal. Fract. 2021, 5, 79. [Google Scholar] [CrossRef]
- Anishchenko, V.S.; Strelkova, G.I. Chimera structures in the ensembles of nonlocally coupled chaotic oscillators. Radiophys. Quantum Electron. 2019, 61, 659–671. [Google Scholar] [CrossRef]
- Cho, J.H.; Hwang, D.U.; Kim, C.M.; Park, Y.J. Chaos synchronization in the presence of noise, parameter mismatch, and an information signal. J. Korean Phys. Soc. 2001, 39, 378–382. [Google Scholar]
- Kahan, W. IEEE Standard 754 for Binary Floating-Point Arithmetic; Lecture Notes on the Status of IEEE; IEEE: Piscataway, NJ, USA, 1999; Volume 754, p. 11. [Google Scholar]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric numerical integration illustrated by the Störmer–Verlet method. Acta Numer. 2003, 12, 399–450. [Google Scholar] [CrossRef] [Green Version]
- Cromer, A. Stable solutions using the Euler approximation. Am. J. Phys. 1981, 49, 455–459. [Google Scholar] [CrossRef]
- Butusov, D.N.; Karimov, A.I.; Tutueva, A.V. Symmetric extrapolation solvers for ordinary differential equations. In Proceedings of the 2016 IEEE NW Russia Young Researchers in Electrical and Electronic Engineering Conference (EIConRusNW), St. Petersburg, Russia, 2–3 February 2016; pp. 162–167. [Google Scholar]
- Butusov, D.N.; Tutueva, A.V.; Homitskaya, E.S. Extrapolation Semi-implicit ODE solvers with adaptive timestep. In Proceedings of the 2016 XIX IEEE International Conference on Soft Computing and Measurements (SCM), St. Petersburg, Russia, 25–27 May 2016; pp. 137–140. [Google Scholar]
- Tlelo-Cuautle, E.; Carbajal-Gomez, V.H.; Obeso-Rodelo, P.J.; Rangel-Magdaleno, J.J.; Nunez-Perez, J.C. FPGA realization of a chaotic communication system applied to image processing. Nonlinear Dyn. 2015, 82, 1879–1892. [Google Scholar] [CrossRef]
- Rössler, O.E. An equation for continuous chaos. Phys. Lett. A 1976, 57, 397–398. [Google Scholar] [CrossRef]
- Nepomuceno, E.G.; Junior, H.M.R.; Martins, S.A.; Perc, M.; Slavinec, M. Interval computing periodic orbits of maps using a piecewise approach. Appl. Math. Comput. 2018, 336, 67–75. [Google Scholar] [CrossRef]
- Karimov, T.I.; Butusov, D.N.; Pesterev, D.O.; Predtechenskii, D.V.; Tedoradze, R.S. Quasi-chaotic mode detection and prevention in digital chaos generators. In Proceedings of the 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Moscow and St. Petersburg, Russia, 29 January–1 February 2018; pp. 303–307. [Google Scholar]
- Hairer, E.; Nørsett, S.P.; Wanner, G. Solving Ordinary Differential Equations I: Nonstiff Problems; Springer: Berlin, Germany, 1993; Volume 8. [Google Scholar]
- Tutueva, A.V.; Karimov, T.I.; Moysis, L.; Nepomuceno, E.G.; Volos, C.; Butusov, D.N. Improving chaos-based pseudo-random generators in finite-precision arithmetic. Nonlinear Dyn. 2021, 104, 727–737. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perturbation Technique | Number of Periodic Sequences |
|---|---|
| Original 16-bit model | 10,038 |
| Switching between two forms of the right-hand side functions | 428 |
| Perturbation of the bifurcation parameter | 13 |
| Proposed technique | 21 |
| Switchable Methods | Number of Periodic Sequences |
|---|---|
| Two Euler–Cromer methods | 21 |
| Euler–Cromer and Euler methods | 1183 |
| Explicit midpoint and Heun methods | 2608 |
| Heun and Euler methods | 599 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tutueva, A.; Butusov, D. Avoiding Dynamical Degradation in Computer Simulation of Chaotic Systems Using Semi-Explicit Integration: Rössler Oscillator Case. Fractal Fract. 2021, 5, 214. https://doi.org/10.3390/fractalfract5040214
Tutueva A, Butusov D. Avoiding Dynamical Degradation in Computer Simulation of Chaotic Systems Using Semi-Explicit Integration: Rössler Oscillator Case. Fractal and Fractional. 2021; 5(4):214. https://doi.org/10.3390/fractalfract5040214
Chicago/Turabian StyleTutueva, Aleksandra, and Denis Butusov. 2021. "Avoiding Dynamical Degradation in Computer Simulation of Chaotic Systems Using Semi-Explicit Integration: Rössler Oscillator Case" Fractal and Fractional 5, no. 4: 214. https://doi.org/10.3390/fractalfract5040214
APA StyleTutueva, A., & Butusov, D. (2021). Avoiding Dynamical Degradation in Computer Simulation of Chaotic Systems Using Semi-Explicit Integration: Rössler Oscillator Case. Fractal and Fractional, 5(4), 214. https://doi.org/10.3390/fractalfract5040214