Abstract
In this paper, the quasi-projective synchronization of distributed-order recurrent neural networks is investigated. Firstly, based on the definition of the distributed-order derivative and metric space theory, two distributed-order differential inequalities are obtained. Then, by employing the Lyapunov method, Laplace transform, Laplace final value theorem, and some inequality techniques, the quasi-projective synchronization sufficient conditions for distributed-order recurrent neural networks are established in cases of feedback control and hybrid control schemes, respectively. Finally, two numerical examples are given to verify the effectiveness of the theoretical results.
1. Introduction
Fractional calculus has more merits than classical integer-order calculus in the description of memory and hereditary properties for a variety of materials and processes, and has therefore been of great interest to scholars [1,2]. Many researchers have realized that fractional calculus could be fit for theoretical research and practical application of science and engineering, such as fractal geometry, signal processing, pattern recognition, dynamics of complex dielectric, viscoelastic materials, and automatic control systems [3,4,5,6,7,8]. As a general rule of fractional calculus, the distributed-order derivative was proposed by Caputo [9]. It is worth noting that a distributed-order derivative is more accurate in describing and explaining some physical phenomena, such as networked structures, the complexity of nonlinear systems, non-homogeneous, multi-scale, and multi-spectral phenomena [10,11,12,13]. Therefore, an increasing number of scholars have set out to study distributed-order derivatives. In [14], the authors studied some properties of the viscoelastic rod with a fractional distributed-order derivative and exhibited its potential applications. Moreover, differential equations need to be solved in some cases. In [15,16], the authors presented a numerical method for solving differential equations of distributed-order.
In the past decades, with the development of modern technology, neural networks have been widely applied in various fields, such as signal processing, image recognition, control theory, associative memory, and optimization [17,18,19,20,21,22]. Nowadays, fractional calculus has been introduced into neural network modelling because it improves the ability of neurons to process information [23]. Fractional order recurrent neural networks, by using sequential information, can enable it to reveal time correlations between nodes that are far away from each other in the data. Thus, the characteristics of memory are endowed to the neural networks. Therefore, it is of great significance to study the dynamic behavior of fractional order recurrent neural networks. In [24], the authors investigated the multistability of fractional-order recurrent neural networks with nonmonotonic activation functions. In [25], through the Lyapunov method, some conditions for the global Mittag–Leffler stability and synchronization were presented. In [26], several Hopf bifurcation conditions for fractional order recurrent neural networks were presented. The authors pointed out that a fractional-order equation can simulate the activity of neuron oscillation and proposed stability theory of incommensurate fractional-order models. In [27], the authors proposed a fractional-order recurrent neural network sliding mode control scheme for a class of dynamic systems. The proposed RNNFSMC scheme is used for a dynamic model of an active power filter to realize the current harmonic compensation control.
Moreover, synchronization, which has been given full attention by scholars, has a number of potential applications in practice, including cryptography, secure communication, optimization of nonlinear systems performance, etc. [28,29,30,31,32,33,34,35]. Since the two state variables of projection synchronization can synchronize to a scaling factor, this feature has a great application prospect in improving transmission speed by extending binary to M base system in secure communication. In [36], the authors proposed a necessary and sufficient condition for projective synchronization of the chaotic systems in arbitrary dimensions and provided an algorithm to obtain all the solutions of the projective synchronization problem. In [37,38], the authors respectively studied the problem of projective synchronization for fractional order chaotic systems and fractional order delayed neural networks. Authors extend the conclusion of quasi-projection synchronization over real number fields to complex number fields, and give the error bound of quasi-projection synchronization for fractional order recurrent neural networks in [39].
To the best of our knowledge, there are few results on the synchronization of distributed-order recurrent neural networks. Therefore, motivated by the above discussions, in this paper, we investigate the quasi-projective synchronization of distributed-order recurrent neural networks. First, we extend some lemmas that are true at fractional order systems to distributed-order systems. Then, by applying the feedback control, the quasi-projective synchronization of distributed-order recurrent neural networks are obtained. Finally, the quasi-projective synchronization of distributed-order recurrent neural networks are investigated in the case of a hybrid control scheme.
The main contribution of this paper can be summarized in brief as follows. (1) The quasi-projective synchronization of distributed-order recurrent neural networks is investigated for the first time. (2) Based on the definition of distributed-order derivative and metric space theory, two distributed-order differential inequalities are obtained. (3) Several sufficient criteria for quasi-projective synchronization of distributed-order recurrent neural networks are established. (4) The error bound of the model is obtained.
The rest of the paper is structured as follows. In Section 2, the distributed-order recurrent neural networks model and relevant definitions are presented. And we deduced some necessary lemmas and some results that conduce to establish sufficient conditions for the quasi-projective synchronization of distributed-order recurrent neural networks. Then, in Section 3, several sufficient conditions are proposed to ensure the quasi-projective synchronization of such neural network models. Two numerical examples in Section 4 are given to illustrate the effectiveness of the theoretical results. Finally, the paper concludes in Section 5.
Notations: In this paper, denotes -order distributed-order fractional derivative operator. , , and respectively indicate the set of real numbers, the n-dimensional Euclidean space, and the set of positive integer.
2. Model Description and Preliminaries
In this paper, we consider the following distributed-order recurrent neural networks
where , ; ; denotes the state vector; : is the activation functions of the ith neuron; denotes the decay rate; represents the interconnection weight of the ith neuron and jth neuron; is the constant control input vector.
In order to investigate the synchronization, the response system is depicted as
where denotes the state vector of response system; the rest notations are same as in drive system (1). Through feedback control, the controller can be described as
Let , then the error system between the drive system (1) and the response system (2) can be written as
Hypothesis 1 (H1).
The function is Lipschitz continuous, i.e., for any , there exists positive constant such that
Hypothesis 2 (H2).
For any , there exist positive numbers such that
Definition 1
([40]). The Caputo fractional derivative of order is defined as
where .
Definition 2
([41]). The distributed-order derivative in the Caputo sense with respect to is defined as
where . In particular, when , it holds that .
Definition 3
([42]). The Laplace transform of distributed-order derivative of a function is
where represents the Laplace transform operator.
Definition 4
([39]). Systems (1) and (2) can be said to be quasi-projectively synchronized, if there exists a small error bound such that
where is the projective coefficient and .
Lemma 1.
Suppose function is continuous and differentiable on , it has
where , .
Proof.
From Definitions 1 and 2, we have
where
By transposing, it can obtain
then, we have
Submitting (15) into (12), we have
□
For more details of the proof process, one can refer to the proof of Theorem 2 in [43].
Lemma 2.
If is a continuously differentiable function, for any and , the following inequality holds almost everywhere
Proof.
It is easy to obtain that is differentiable except several points, which belong to the set . In addition, according to measure theory, we assert that is a countable set and its measure is 0.
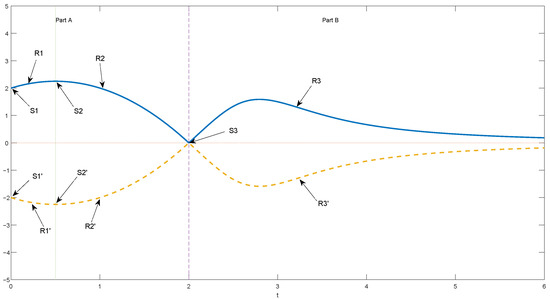
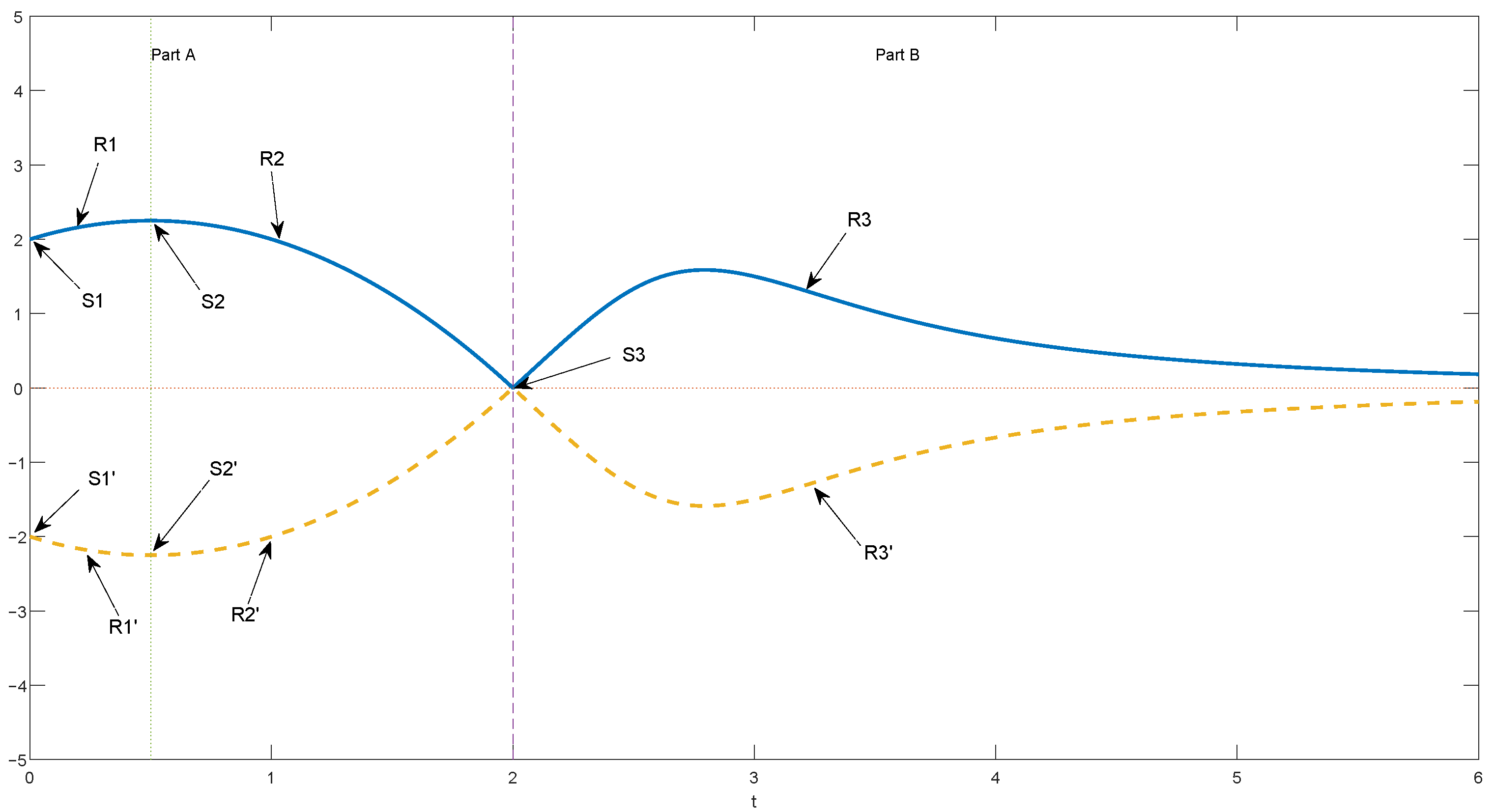
Afterwards, we prove that inequation (17) holds except at the set . Without loss of generality, the trajectory of can be depicted as Figure 1. The solid line indicating is divided into two parts by . Suppose that there exists only one extreme point as point and every part is divided into two pieces like in part A. The dash line is the trajectory of which may be the one of in any part. denotes the coordinate of point S in Figure 1. When , we have
and
Figure 1.
The ’s trajectory.
In Part A, if , then ; lif , according to the properties of integrals and derivatives, we have
Due to , then we have
In Part B, whether or , holds, thus
To sum up, inequation (17) holds almost everywhere. For the case where multiple extreme points exist, in [44] the authors prove that the inequation (17) is still valid. □
Remark 1.
It is noted that a distributed-order derivative is a generalization of a fractional derivative. In Lemmas 1 and 2, if the order of the distributed-order derivative changes from to α, the above two distributed-order inequalities become fractional inequalities, and their conclusions are proved in references [43,44].
Lemma 3
([45]). Let , , , and . Then, for any , it holds that
3. Main Results
Theorem 1.
Under assumptions (H1) and (H2), if the following inequalities hold
and the roots of are in the open left-half complex plane, then systems (1) and (2) can achieve quasi-projectively synchronized under the controller (3).
Proof.
Consider the Lyapunov function candidate as follows
where is positive constant.
According to Lemma 1, it shows that
where
and
Since , hence, we can find such that
Taking the Laplace transform from both sides of (29), one has
It follows from (30) that
then
where . Since , then
In light of Laplace final value theorem, we have
Furthermore, one has
which means that
Thus, in accordance with Definition 4, system (1) and system (2) can be said to be quasi-projectively synchronized. □
Theorem 2.
Under assumptions (H1) and (H2), if the following inequalities hold
and the roots of are in the open left-half complex plane, then systems (1) and (2) can achieve quasi-projectively synchronization under the controller (3).
Proof.
Consider the Lyapunov function candidate as follows
where is positive constant.
According to Lemmas 1 and 3, for any positive constant , it shows that
where and .
Same as the proof of Theorem 1, by applying the Laplace transform and final value theorem, one has
Thus, in accordance with Definition 4, systems (1) and (2) can be said to be quasi-projectively synchronized. □
Depending on different proof methods, we obtain Theorems 1 and 2, which have different conditions. However, they both guarantee that systems (1) and (2) can achieve quasi-projectively synchronization.
Next, we consider the following hybrid control scheme, the controller can be described as
Theorem 3.
Under assumptions (H1) and (H2), if the following inequality holds
and the roots of are in the open left-half complex plane, then systems (1) and (2) can achieve quasi-projectively synchronization under the controller (43).
Proof.
Consider the Lyapunov function candidate as follows
where is positive constant.
According to Lemmas 1 and 2, for any positive constant , it shows that
By applying Lemma 3, we can obtain that
where .
Same as the proof of Theorem (1), by applying the Laplace transform and final value theorem, one has
Thus, in accordance with Definition 4, system (1) and system (2) can be said to be quasi-projectively synchronized. □
4. Numerical Simulation Examples
By applying the predictor—corrector scheme [46], two numerical examples are given to demonstrate the theoretical results in this section.
Example 1.
Consider the following distributed-order system
where , , denotes Dirac function; and
The response system is depicted as
where and are the same as the drive system (50).
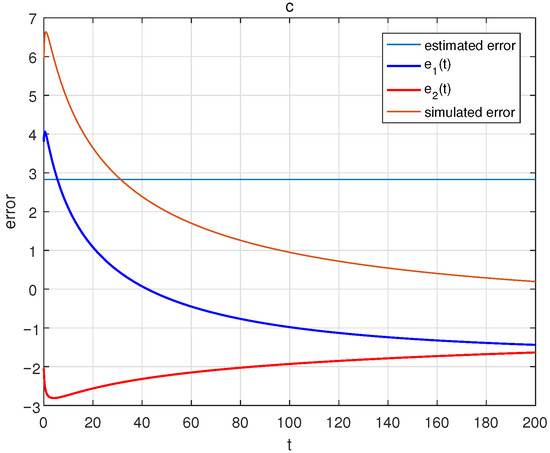
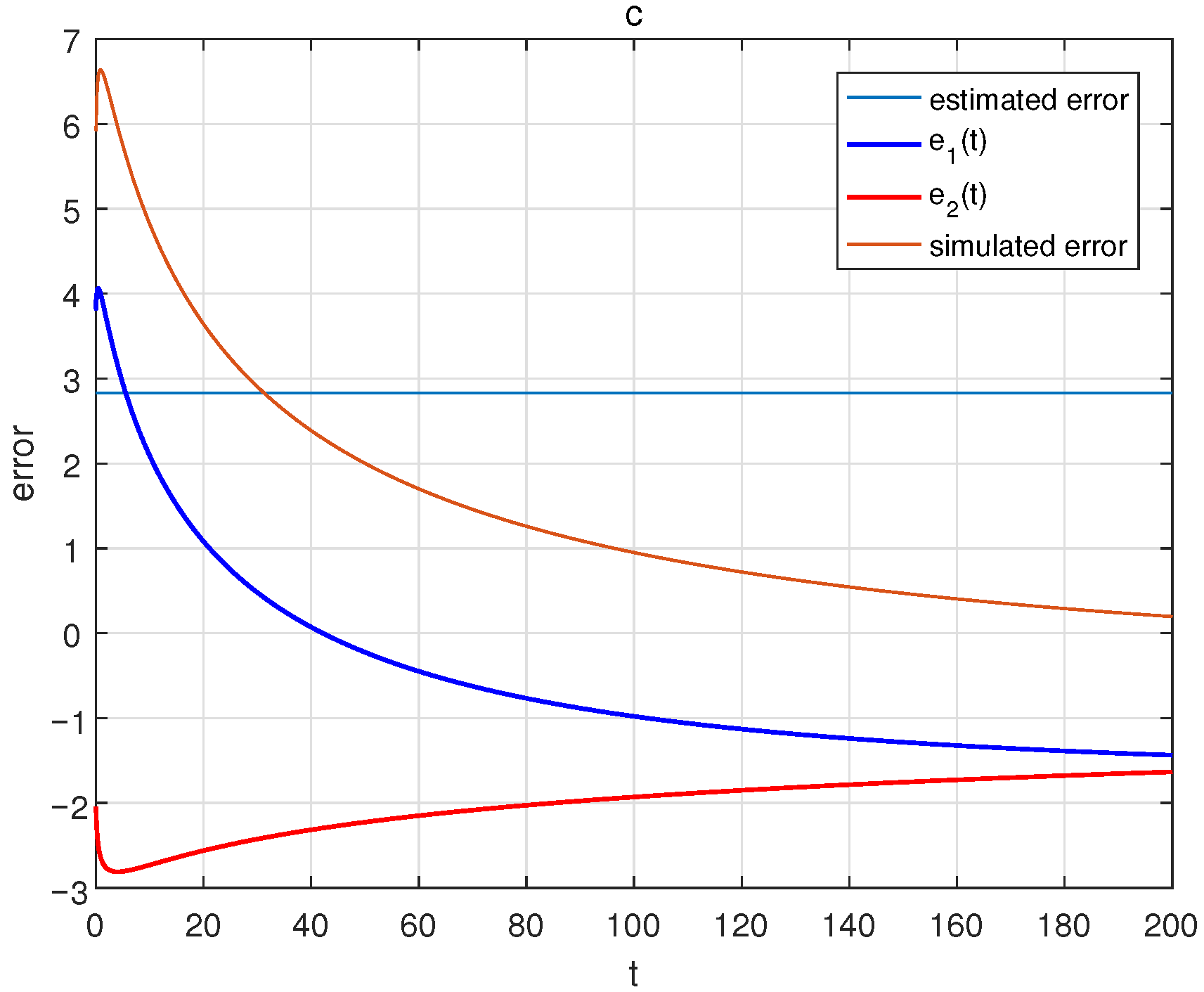
Take , , by calculation, we have and the error bounded . Moreover, one has
therefore , which are located in the open left-half complex plane. In addition,
which means that all conditions in Theorem 1 hold. Hence, it follows from Theorem 1 that systems (50) and (51) can achieve quasi-projectively synchronization. Figure 2 is shows the numerical simulation result.
Figure 2.
The state of error system when .
Example 2.
Consider the following distributed-order system
where , , denotes Dirac function; .
The response system is depicted as
where are the same as the drive system (54).
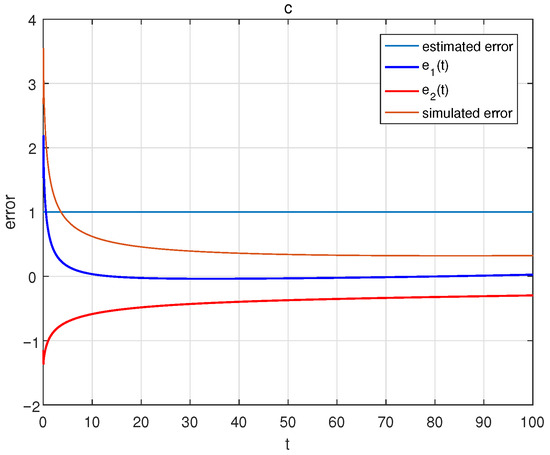
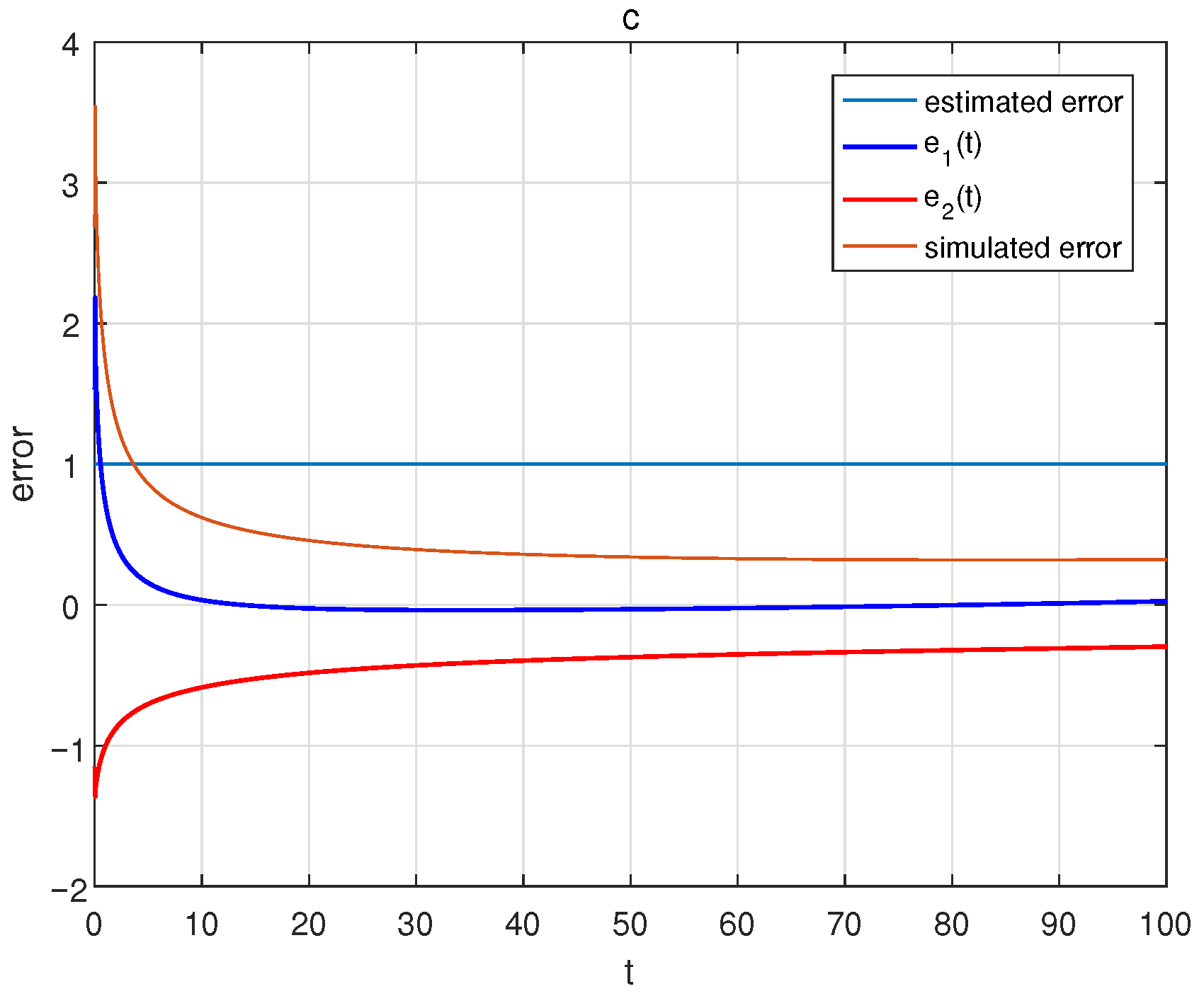
Take , , by calculation, we have and the error bounded , by similar with the processes in Example 1, we can obtain that all conditions in Theorem 3 hold. Hence, it follows from Theorem 3 that systems (54) and (55) can achieve quasi-projectively synchronized. Figure 3 is figure of numerical simulation result.
Figure 3.
The state of error system when .
5. Conclusions
In this paper, the problems of quasi-projective synchronization of distributed-order recurrent neural networks have been investigated. Based on the definition of the distributive-order derivative and the metric space theory, some lemmas that are widely used in fractional order systems have been generalized to distributed-order systems. Afterwards, according to the Lyapunov method, Laplace transform, Laplace final value theorem, and some inequality techniques, the quasi-projective synchronization of the aforementioned neural networks have been investigated. Finally, two numerical examples have been given to manifest the validity of the theoretical results.
We would like to point out that it is possible to use our method to discuss some dynamic behavior, such as synchronization, passivity and state estimation of distributed-order complex-valued neural networks and quaternion-valued neural networks. The corresponding results will be carried out in the near future.
Author Contributions
Conceptualization, Writing—original draft, X.L.; Project administration, Writing—review & editing, K.L.; Supervision, Writing—review & editing, Q.S.; Software, Revised manuscript, X.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This work was supported by the National Natural Science Foundation of China under Grant 61573010 and 61906023, the Opening Project of Sichuan Province University Key Laboratory of Bridge Non-Destruction Detecting and Engineering Computing under Grant 2021QYJ06, and in part by the Chongqing Research Program of Basic Research and Frontier Technology under Grant cstc2019jcyj-msxmX0710.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Machado, J.T.; Kiryakova, V.; Mainardi, F. Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1140–1153. [Google Scholar] [CrossRef] [Green Version]
- Uchaikin, V.V. Fractional Derivatives for Physicists and Engineers; Springer: Berlin/Heidelberg, Germany, 2013; Volume 2. [Google Scholar]
- Baleanu, D.; Güvenç, Z.B.; Machado, J.T. New Trends in Nanotechnology and Fractional Calculus Applications; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Engheia, N. On the role of fractional calculus in electromagnetic theory. IEEE Antennas Propag. Mag. 1997, 39, 35–46. [Google Scholar] [CrossRef]
- Heymans, N.; Bauwens, J.-C. Fractal rheological models and fractional differential equations for viscoelastic behavior. Rheol. Acta 1994, 33, 210–219. [Google Scholar] [CrossRef]
- Kempfle, S.; Schäfer, I.; Beyer, H. Fractional calculus via functional calculus: Theory and applications. Nonlinear Dyn. 2002, 29, 99–127. [Google Scholar] [CrossRef]
- Machado, J.T.; Jesus, I.S.; Galhano, A.; Cunha, J.B. Fractional order electromagnetics. Signal Process. 2006, 86, 2637–2644. [Google Scholar] [CrossRef] [Green Version]
- Mainardi, F. Fractional relaxation-oscillation and fractional diffusion-wave phenomena. Chaos Solitons Fractals 1996, 7, 1461–1477. [Google Scholar] [CrossRef]
- Caputo, M. Mean fractional-order-derivatives differential equations and filters. Ann. Dellniversita Ferrara 1995, 41, 73–84. [Google Scholar]
- Atanacković, T.M.; Oparnica, L.; Pilipović, S. On a nonlinear distributed order fractional differential equation. J. Math. Anal. Appl. 2007, 328, 590–608. [Google Scholar] [CrossRef]
- Chen, W.; Sun, H.; Zhang, X.; Korošak, D. Anomalous diffusion modeling by fractal and fractional derivatives. Comput. Math. Appl. 2010, 59, 1754–1758. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Chen, W.; Sheng, H.; Chen, Y. On mean square displacement behaviors of anomalous diffusions with variable and random orders. Phys. Lett. A 2010, 374, 906–910. [Google Scholar] [CrossRef]
- Xu, M.; Tan, W. Intermediate processes and critical phenomena: Theory, method and progress of fractional operators and their applications to modern mechanics. Sci. China Ser. G 2006, 49, 257–272. [Google Scholar] [CrossRef]
- Atanackovic, T.; Budincevic, M.; Pilipovic, S. On a fractional distributed-order oscillator. J. Phys. A Math. Gen. 2005, 38, 6703. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J. Numerical solution methods for distributed order differential equations. Fract. Calc. Appl. Anal. 2001, 4, 531–542. [Google Scholar]
- Diethelm, K.; Ford, N.J. Numerical analysis for distributed-order differential equations. J. Comput. Appl. Math. 2009, 225, 96–104. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Ho, D.W. Stabilization of complex dynamical networks with noise disturbance under performance constraint. Nonlinear Anal. Real World Appl. 2011, 12, 1974–1984. [Google Scholar] [CrossRef]
- Song, Q.; Long, L.; Zhao, Z.; Liu, Y.; Alsaadi, F.E. Stability criteria of quaternion-valued neutral-type delayed neural networks. Neurocomputing 2020, 412, 287–294. [Google Scholar] [CrossRef]
- Sun, C.; He, W.; Ge, W.; Chang, C. Adaptive neural network control of biped robots. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 315–326. [Google Scholar] [CrossRef]
- Yang, R.; Wu, B.; Liu, Y. A halanay-type inequality approach to the stability analysis of discrete-time neural networks with delays. Appl. Math. Comput. 2015, 265, 696–707. [Google Scholar] [CrossRef]
- Zeng, Z.; Wang, J. Design and analysis of high-capacity associative memories based on a class of discrete-time recurrent neural networks. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 1525–1536. [Google Scholar] [CrossRef]
- Zhang, W.; Tang, Y.; Miao, Q.; Du, W. Exponential synchronization of coupled switched neural networks with mode-dependent impulsive effects. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1316–1326. [Google Scholar] [CrossRef]
- Lundstrom, B.N.; Higgs, M.H.; Spain, W.J.; Fairhall, A.L. Fractional differentiation by neocortical pyramidal neurons. Nat. Neurosci. 2008, 11, 1335. [Google Scholar] [CrossRef]
- Liu, P.; Zeng, Z.; Wang, J. Multiple mittag–leffler stability of fractional-order recurrent neural networks. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2279–2288. [Google Scholar] [CrossRef]
- Chen, J.J.; Zeng, Z.G.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef]
- Wang, W.; Qiao, Y.; Miao, J.; Duan, L. Dynamic analysis of fractional-order recurrent neural network with caputo derivative. Int. J. Bifurc. Chaos 2017, 27, 1750181. [Google Scholar] [CrossRef]
- Fei, J.; Wang, H. Recurrent neural network fractional-order sliding mode control of dynamic systems. J. Frankl. Inst. 2020, 357, 4574–4591. [Google Scholar] [CrossRef]
- Boccaletti, S.; Kurths, J.; Osipov, G.; Valladares, D.; Zhou, C. The synchronization of chaotic systems. Phys. Rep. 2002, 366, 1–101. [Google Scholar] [CrossRef]
- Chen, G.; Dong, X. From Chaos to Order: Methodologies, Perspectives and Applications; World Scientific: Singapore, 1998; Volume 24. [Google Scholar]
- Sprott, J.; Jeffrey, D. Chaos and Time-Series Analysis; Oxford University Press: Oxford, UK, 2003; Volume 47, p. 373. [Google Scholar]
- Yang, T.; Chua, L.O. Impulsive stabilization for control and synchronization of chaotic systems: Theory and application to secure communication. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 976–988. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Li, C.; Huang, T.; Song, Q.; Chen, X. Quasi-uniform synchronization of fractional-order memristor-based neural networks with delay. Neurocomputing 2017, 234, 205–215. [Google Scholar] [CrossRef]
- Li, H.; Cao, J.; Hu, C.; Jiang, H. Quasi-projective and complete synchronization of fractional-order complex-valued neural networks with time delays. Neural Netw. 2019, 118, 102–109. [Google Scholar] [CrossRef]
- Guo, R.; Lv, W.; Zhang, Z. Quasi-projective synchronization of stochastic complex-valued neural networks with time-varying delay and mismatched parameters. Neurocomputing 2020, 415, 184–192. [Google Scholar] [CrossRef]
- Anbuvithya, R.; Sri, S.; Vadivel, R.; Gunasekaran, N.; Hammachukiattikul, P. Extended dissipativity and non-fragile synchronization for recurrent neural networks with multiple time-varying delays via sampled-data control. IEEE Access 2021, 9, 31454–31466. [Google Scholar] [CrossRef]
- Guo, R. Projective synchronization of a class of chaotic systems by dynamic feedback control method. Nonlinear Dyn. 2017, 90, 53–64. [Google Scholar] [CrossRef]
- Ding, Z.; Shen, Y. Projective synchronization of nonidentical fractional-order neural networks based on sliding mode controller. Neural Netw. 2016, 76, 97–105. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Cao, J.; Wu, R.; Alsaedi, A.; Alsaadi, F.E. Projective synchronization of fractional-order delayed neural networks based on the comparison principle. Adv. Differ. Equ. 2018, 2018, 73. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Yu, J.; Hu, C.; Jiang, H. Quasi-projective synchronization of fractional-order complex-valued recurrent neural networks. Neural Netw. 2018, 104, 104–113. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F.; Podlubny, I. Fractional Differential Equations; Academic Press: Cambridge, MA, USA, 1999; Volume 8, pp. 683–699. [Google Scholar]
- Caputo, M. Rigorous time domain responses of polarizable media. Ann. Geophys. Ann. Geofis. 1997, 40, 97–106. [Google Scholar] [CrossRef]
- Jiao, Z.; Chen, Y.-Q.; Podlubny, I. Distributed-Order Dynamic Systems: Stability, Simulation, Applications and Perspectives; Springer: London, UK, 2012. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, Y.; Wang, H. Mittag-leffler stability of fractional-order hopfield neural networks. Nonlinear Anal. Hybrid Syst. 2015, 16, 104–121. [Google Scholar] [CrossRef]
- Cao, J. New results concerning exponential stability and periodic solutions of delayed cellular neural networks. Phys. Lett. A 2003, 307, 136–147. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).