1. Introduction
In recent decades, the theory of fractional calculus has been attracting much attention partly due to its ability for describing memory and hereditary properties of various materials and processes [
1,
2,
3,
4,
5,
6,
7]. Fractional calculus has been applied to different fields such as viscoelastic constitutive equations and related mechanical models [
6,
7,
8,
9,
10,
11], anomalous diffusion phenomena [
4,
6,
12,
13], hydrology [
14], control and optimization theory [
3,
15], etc. It is worthwhile to mention that fractional calculus can be used to describe not only viscoelasticity, but also viscoinertia by different values of order [
16,
17]. The applications of fractional calculus lead to fractional differential equations (FDEs) in theory [
2,
3,
4,
5,
18].
Let us recall some related definitions of fractional calculus used in this article. Let
be piecewise continuous on
and integrable on any finite subinterval of
. Then, for
, the Riemann–Liouville fractional integral of
is defined as
for
, and
for
, where
is the gamma function. The fractional integral satisfies the following equalities:
Let
be a positive real number,
,
, and
be piecewise continuous on
and integrable on any finite subinterval of
. Then, the Caputo fractional derivative of
of order
is defined as
For the power function
,
, if
, then we have
The
-order integral of the
-order Caputo fractional derivative requires the knowledge of the initial values of the function and its integer-ordered derivatives,
This property enables the Caputo fractional derivative to be conveniently applied and analyzed.
In the earlier monograph [
1], the Grünwald definition and the Riemann–Liouville definition of fractional calculus were introduced, where numerical differentiation and integration were considered and semi-integration was introduced by a designed electrical circuit model and semi-differentiation was applied to diffusion problems. The Weyl fractional calculus was introduced in [
2] beside the Grünwald definition and the Riemann–Liouville definition. In [
3], FDEs and fractional-order system and controllers were considered, where the Caputo fractional derivative was introduced. The existence, uniqueness and analytical methods of solutions for FDEs were investigated in [
4]. In [
18], the Caputo-type fractional derivative and FDEs were emphasized. In [
6], fractional viscoelastic models and fractional wave models in viscoelastic media were introduced. In [
5], numerical methods and fractional variational principle were reviewed.
Damping, deformation, vibration and dissipation arising from viscoelastic material can be modeled by FDEs [
3,
4,
6,
7]. The method of variable separation for fractional partial differential equation describing anomalous diffusion [
4,
6,
12,
14] can lead to a boundary value problem (BVP) for a fractional ordinary differential equation (ODE) [
19]. The theorem of existence and uniqueness of solutions for fractional ODEs was presented in [
3,
4,
18,
20]. Some analytical and numerical methods were proposed to solve FDEs, e.g., see [
3,
4,
5,
21,
22,
23,
24,
25]. BVPs for fractional ODEs were considered in [
19,
26,
27,
28,
29] by using the Adomian decomposition method, wavelet method, the method of upper and lower solutions, orthogonal polynomial method, etc. However, a fractional BVP with varying coefficients and mixed boundary conditions has hardly been considered.
In this work, we consider the BVP for the varying coefficient linear Caputo fractional ODE
Subject to the mixed boundary conditions
where the coefficients
,
,
are specified continuous functions, the boundary parameters satisfy
and
. In the next
Section 2, some preliminaries about the shifted Chebyshev polynomials are presented. In
Section 3, we first convert the BVP, (
7)–(
9), into an equivalent fractional differential–integral equation merging the boundary conditions, then introduce the collocation method using the shifted Chebyshev polynomials of the first kind to solve the fractional differential–integral equation. Next, three numerical examples are solved by using the proposed method.
Section 4 summarizes our conclusions.
2. The Shifted Chebyshev Polynomials of the First Kind
The Chebyshev polynomials of the first kind are defined by the formulae [
30]
They take on the explicit expressions as
It is well-known that the Chebyshev polynomials of the first kind are orthogonal on the interval
with the weight function
and
has exactly
n zeros within the interval
:
The Chebyshev polynomials of the first kind satisfy the recurrence relation
It is well-known that if
is
integrable on
with the weight function
, then its Chebyshev series expansion is
convergent with respect to its weight function
. If
has better smoothness, then stronger convergence can be attained for its Chebyshev series. If the function
has
continuous derivatives on
, then
for all
, where
is the
-term truncation of the Chebyshev series expansion of
. For more details for convergence, see [
30].
In order to deal with the BVP on the interval
, we consider the shifted Chebyshev polynomials
They are orthogonal on the interval
with the weight function
and the zeros of
are
As a complement to Equation (
13), the shifted Chebyshev polynomials satisfy the relationship
So, the explicit expressions of the shifted Chebyshev polynomials are conveniently obtained:
Finally, we mention the shifted Chebyshev polynomials of the second kind, which will also be used in the next section for the representation of solutions, where is the Chebyshev polynomials of the second kind.
3. The Equivalent Fractional Differential-Integral Equation and Chebyshev Collocation Method
First, we derive an equivalent differential–integral equation to the BVP (
7)–(
9). Applying the integral operator
to both sides of Equation (
7) and using Equation (
6) yields
Our aim is to solve for
and
from the boundary conditions (
8) and (
9), and then obtain an equation about the solution
without any undetermined constants. Substituting
in Equation (
15) yields
where the value of the fractional integral is defined for a general
th order integral of a function
at
as
Calculating the first order derivative on the both sides of Equation (
15) leads to
Substituting
yields
Substituting Equations (
16) and (
19) into Equation (
9) yields
where
Equations (
8) and (
20) constitute a system of algebraic equations about
and
. The coefficient determinant is
which is positive by our assumptions. Thus, we can solve the system of algebraic Equations (
8) and (
20) and obtain
Substituting Equations (
23) and (
24) into Equation (
15), we obtain
Replacing
by using Equation (
21) and reorganizing the equation yield
where
Only involves the known boundary parameters and the known input function
. Equation (
26) is the equivalent differential–integral equation to the BVP (
7)–((
9). In the sequel, we seek for the solution to the differential-integral Equation (
26).
We approximate the solution by an
-term truncation of the shifted Chebyshev series,
where
,
, are undetermined coefficients. Inserting
into Equation (
26), we obtain the linear equation about
,
,
We note that in Equation (
29),
and
are constants, represent the values of fractional integrals.
The collocation method may be applied to determine the coefficients
. The collocation points are taken as the zeroes of the
degree shifted Chebyshev polynomial
,
Thus, the collocation equation system is
where
The matrix form of the collocation equation system (
31) is
where
and the entries of the matrix
W are
The solution of the linear algebraic equation system (
31) or (
33) gives the coefficients
in Equation (
28).
For the Dirichlet boundary conditions
the boundary parameters are simplified as
and
, and thus Equation (
31) degenerates to
where
We remark that by the relationship of the first-kind and second-kind Chebyshev polynomials
, we have the relationship of the shifted Chebyshev polynomials of the two kinds
So, the derivative
in Equations (
31), (
35) and (
36) may be replaced by the second-kind Chebyshev polynomials.
The operators
,
and
in Equations (
31), (
32) and (
35) represent the values of fractional integrals of the known functions. Since the appearance of the varying coefficients
and
, manual computations for these integrals are laborious in general. Here we approximate the varying coefficients again using their truncated shifted Chebyshev series as
where
and the superscript
of ∑ denotes that the first term in the sum is halved. We note that there is no need of connections between the values of
m and
M in Equations (
28) and (
38). Utilizing the Gauss–Chebyshev quadrature formula we derive the numerical formulae for
and
as
where
are the zeroes of the
degree shifted Chebyshev polynomial
,
Thus, making use of the decompositions in (
38), the calculation of the integrals
,
and
in Equations (
31), (
32) and (
35) only involves integrals of polynomials, so can be carried out exactly.
In the following three examples, we take
in Equation (
38) to truncate the decompositions of the coefficients
and
and to calculate the involved integrals
,
and
. Collocation equation systems are solved by using Mathematica command “LinearSolve”. Figures of approximate analytical solutions and errors are generated by using Mathematica.
Example 1. Consider the BVP for the linear FDE where
The BVP has the exact solution
The boundary parameters are
,
The collocation equation system in (
31) is
where
Take
and 5, respectively, the solution approximations
are calculated as
The error function and maximum error of the approximate solution
are defined as
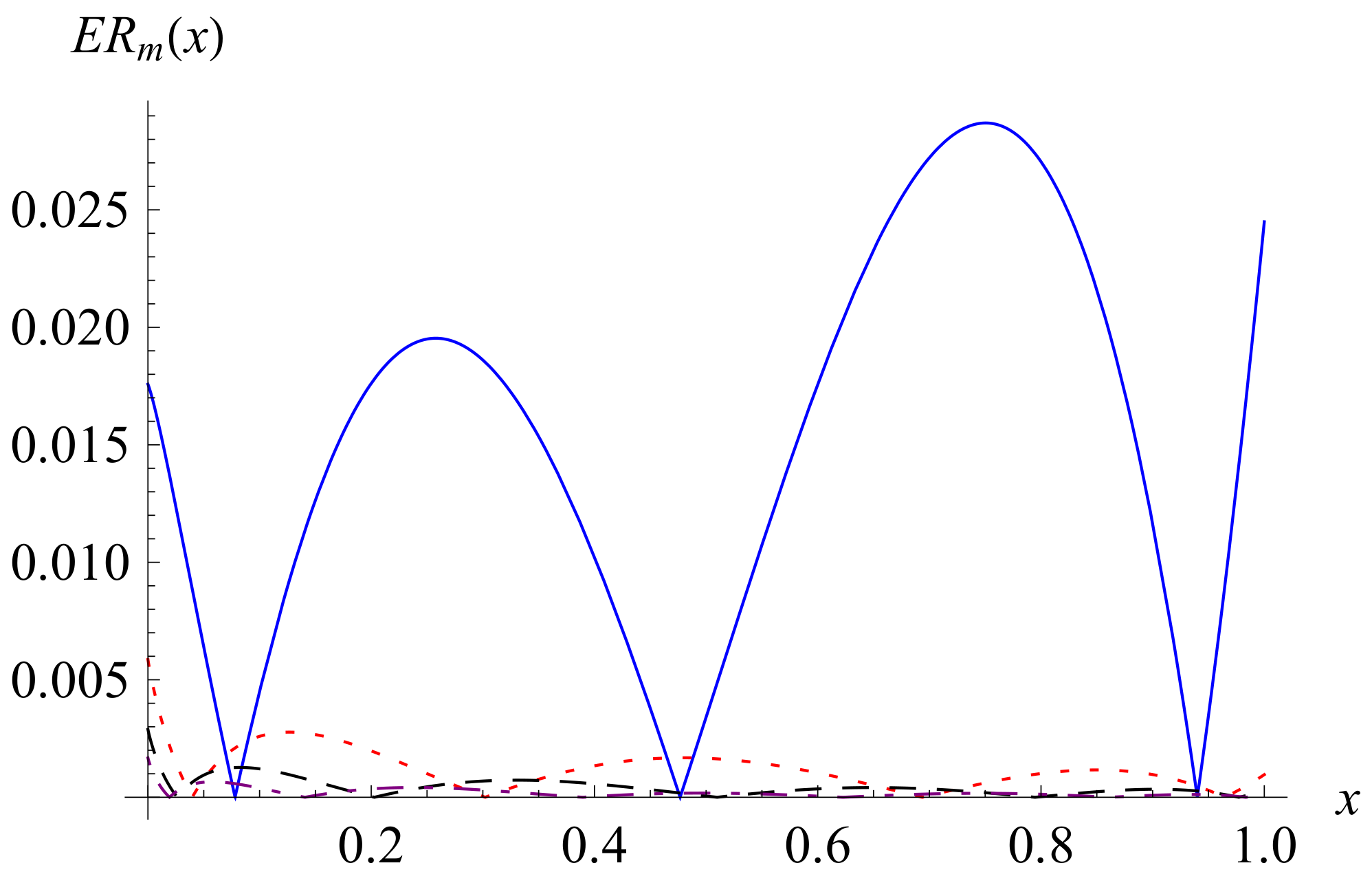
In
Figure 1, the error functions
for
are depicted, where at the
collocation points of
, errors are zero. The maximum errors of the four approximate solutions are 0.028696, 0.005861, 0.002884, and 0.001670, respectively.
Example 2. Consider the BVP for the linear FDE If , the BVP has the exact solution
For this example, the coefficients and parameters are
,
,
,
and
The collocation equation system in Equation (
31) becomes
where
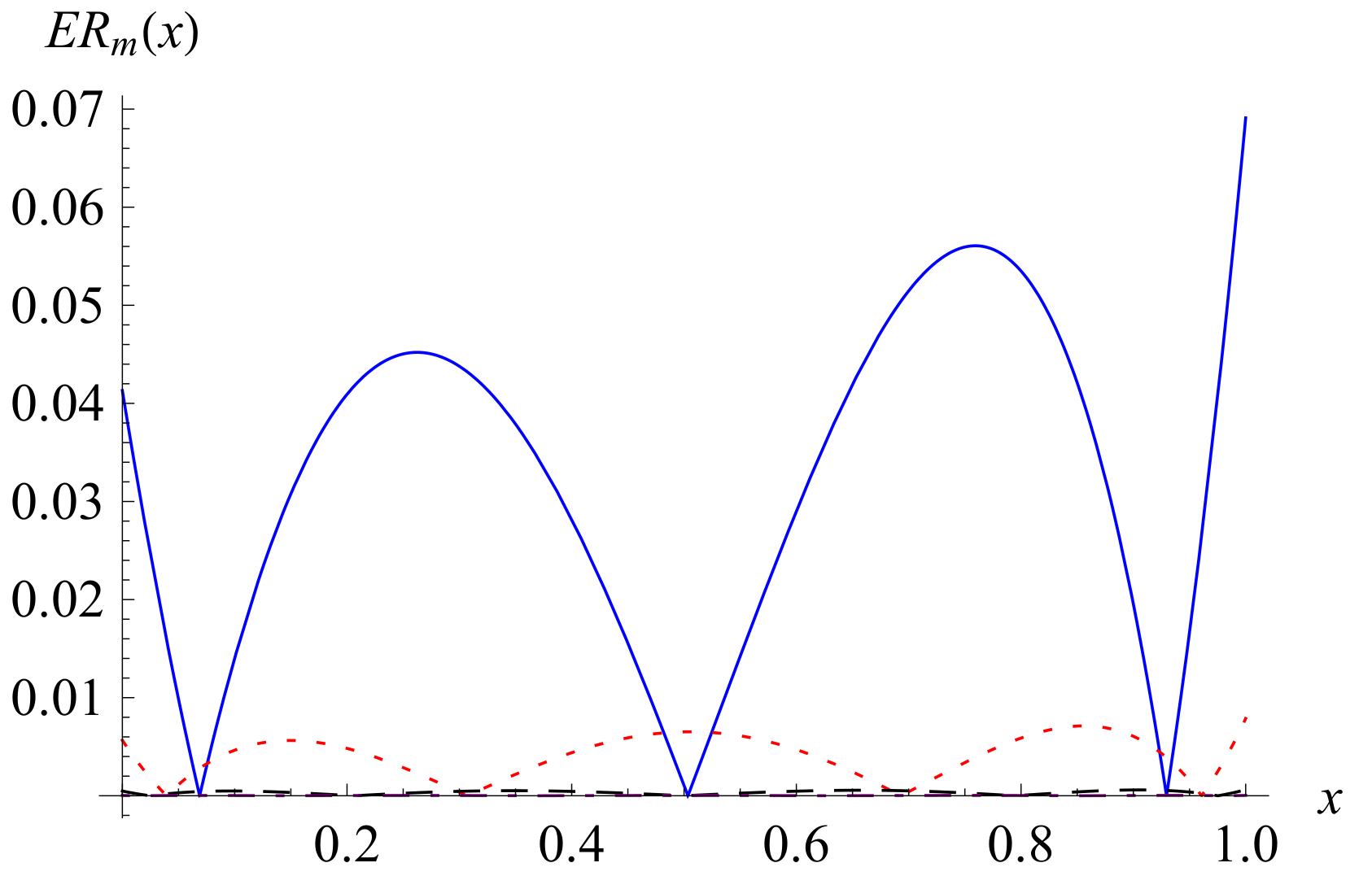
For the case of
, the error functions
are depicted in
Figure 2 for
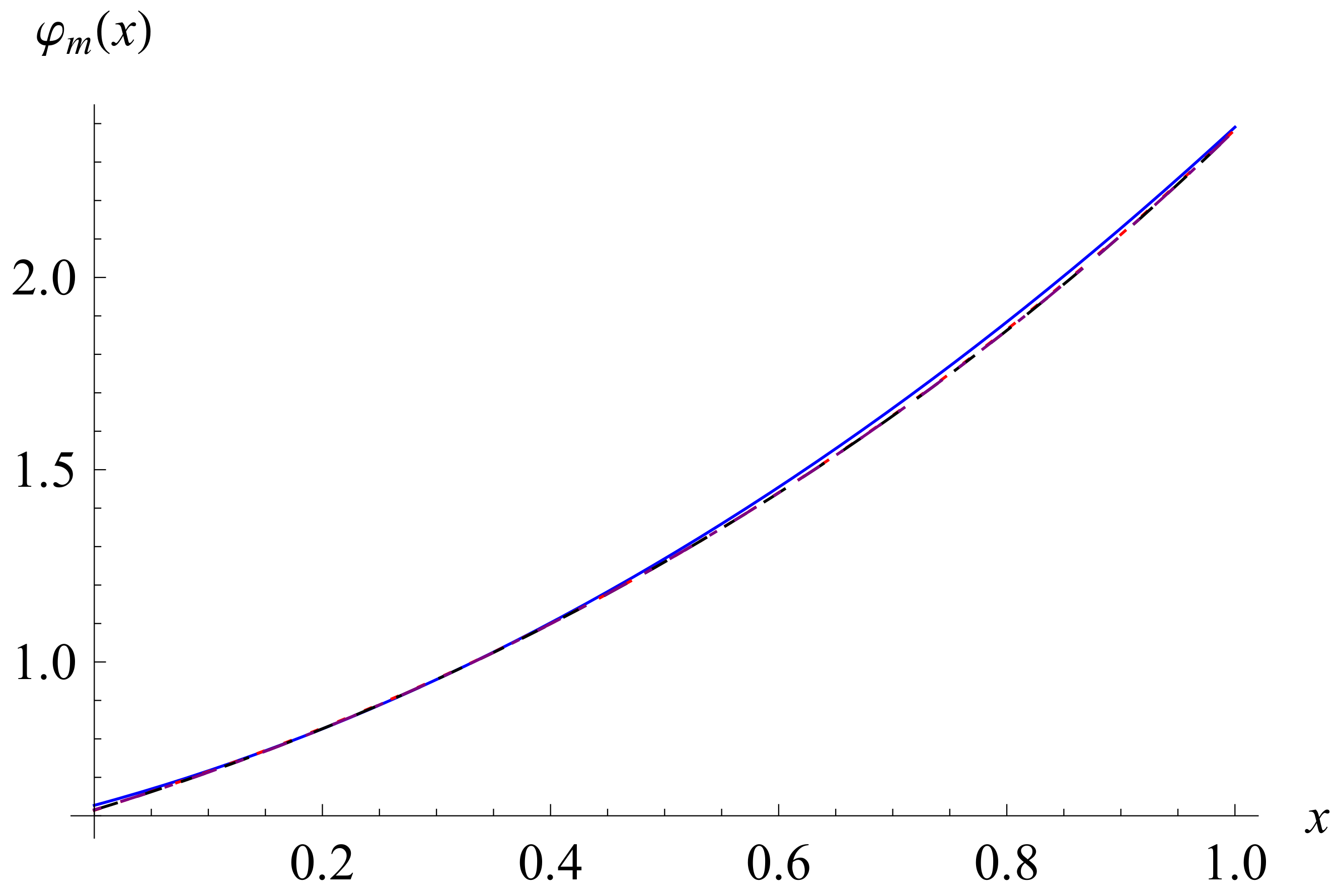
m = 2–5. The maximum errors of the approximate solutions are 0.069103, 0.007877, 0.000620, and 0.000038, respectively. For the case of
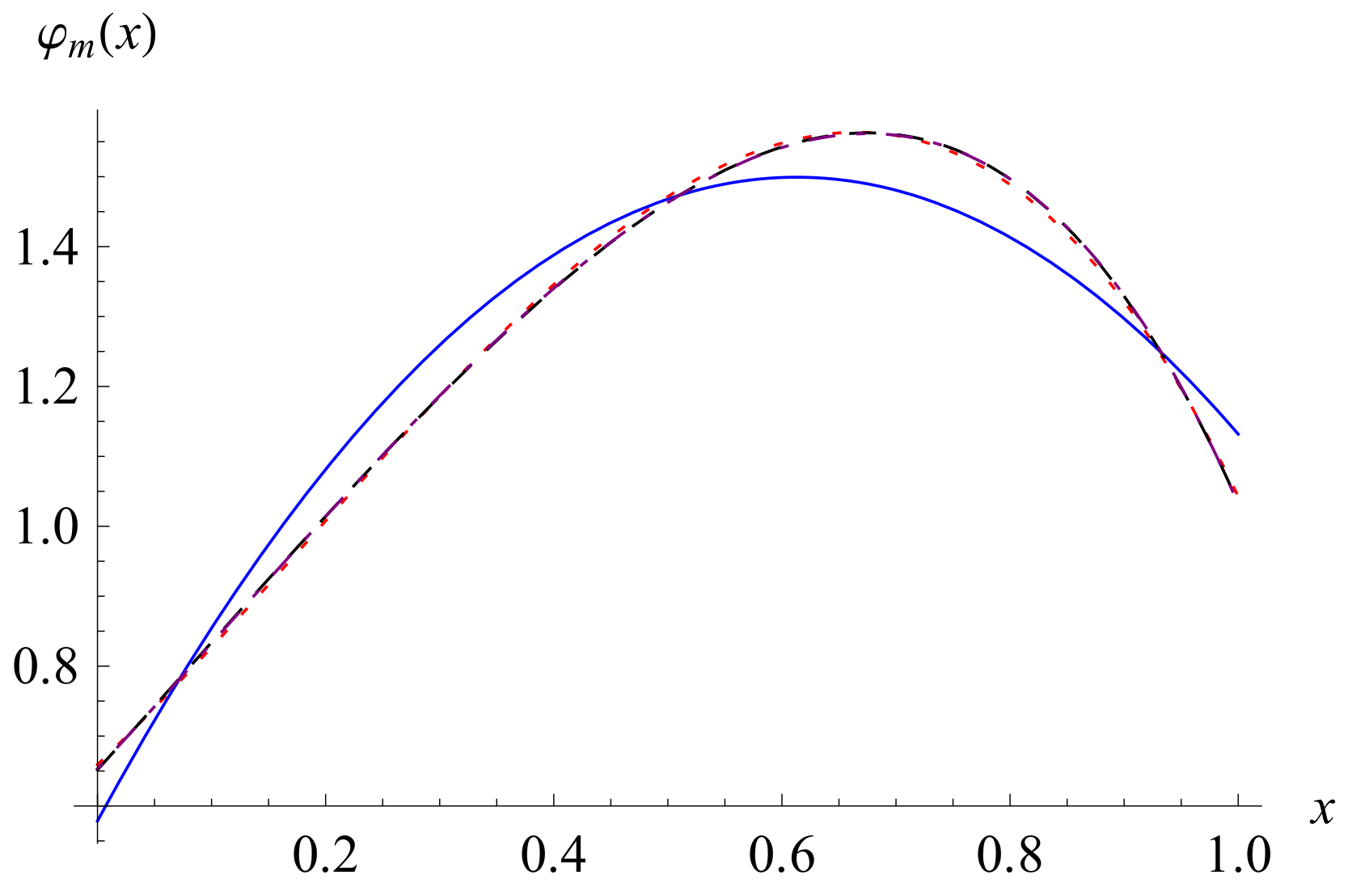
, the solution approximations
,
m = 2–5, are calculated as
The condition numbers of the coefficient matrices
W in the derivations of the four solution approximations are 2.85, 3.29, 3.67 and 4.02, respectively. These values show that the coefficient matrices
W are well conditioned. We note that the condition number is based on the
-matrix norm. The four solution approximations are plotted in
Figure 3, where a fast convergence is shown.
Example 3. Consider the BVP for the linear FDE If , the BVP has the exact solution .
The coefficients and parameters are
,
,
The collocation equation system in Equation (
31) becomes
where
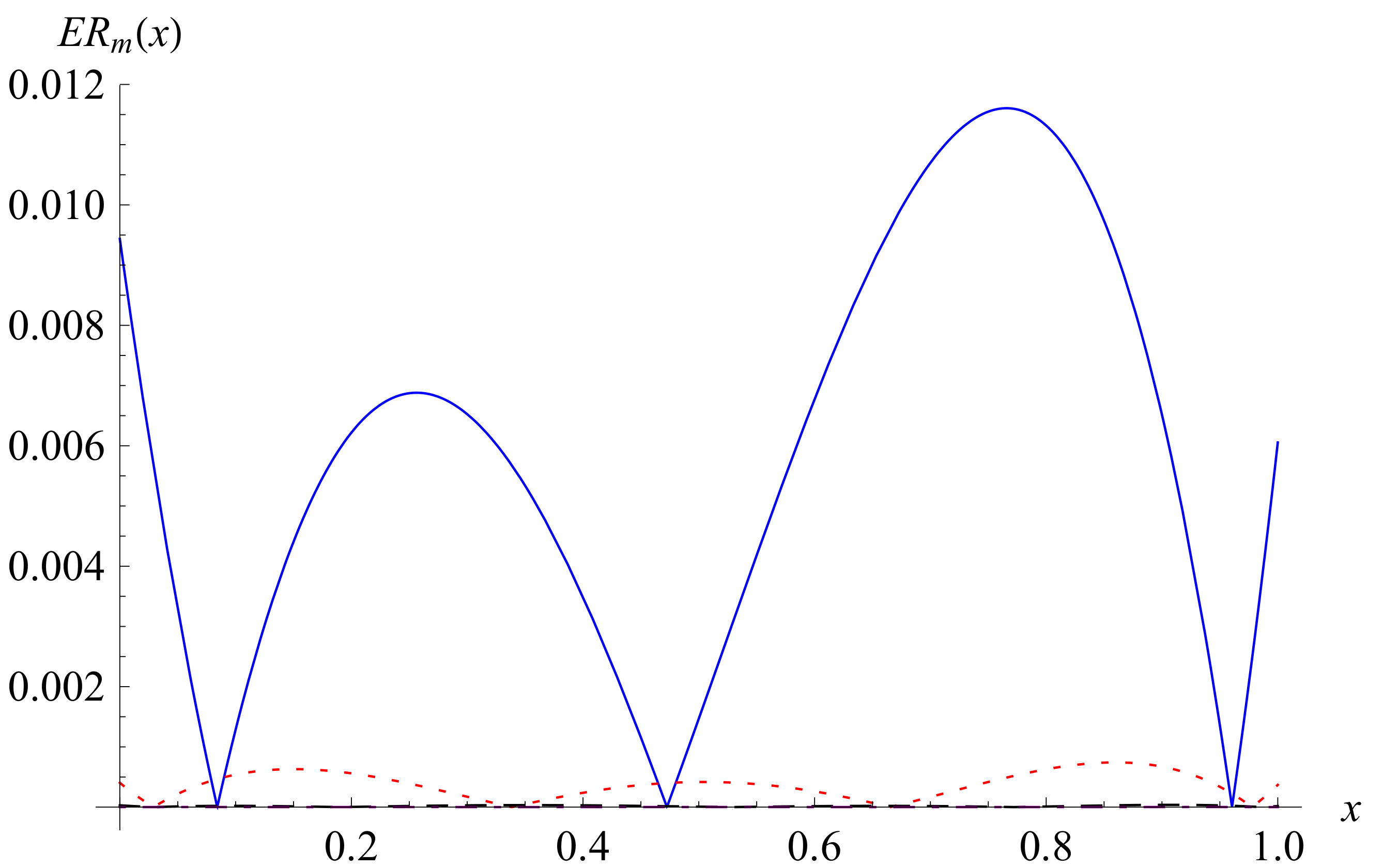
For the case of
, the error functions
for
are depicted in
Figure 4. The maximum errors of the approximate solutions are 0.011605, 0.000742, 0.000037, and 0.000002, respectively. For the case of
, the solution approximations
for
are calculated as
The condition numbers of the coefficient matrices
W in the derivations of the four solution approximations are 4.87, 7.83, 11.90 and 17.05, respectively. So the coefficient matrices
W are well conditioned. The four solution approximations are plotted in
Figure 5.
In the three examples, fast convergent rates are shown only using the minor term number with
in Equation (
38) for the integral computation of the known functions, and the minor term number with
and 5 in Equation (
28) for the truncated Chebyshev series of the unknown function.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




