
The Tracking Control of the Variable-Order Fractional Differential Systems by Time-Varying Sliding-Mode Control Approach


 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- Through the combination of the variable-order fractional operator and the global sliding-mode control approach, a kind of novel variable-order fractional sliding-mode controller is proposed to realize the tracking control of the variable-order fractional uncertain system.
- (ii)
- For the two-dimensional system and the corresponding n-dimensional system, two kinds of continuous controllers are designed based on a full-order global sliding-mode surface, which is free of chattering.
2. Description of the System
3. The Global Time-Varying Sliding-Mode Control of Two-Dimensional of the VO Fractional System
4. The Global Time-Varying Sliding-Mode Control of n-Dimensional of the VO Fractional System
4.1. The First VO Fractional Sliding-Mode Control Law
- ,
- as ,
- has a continuous derivative.
4.2. The Second VO Fractional Sliding-Mode Control Scheme
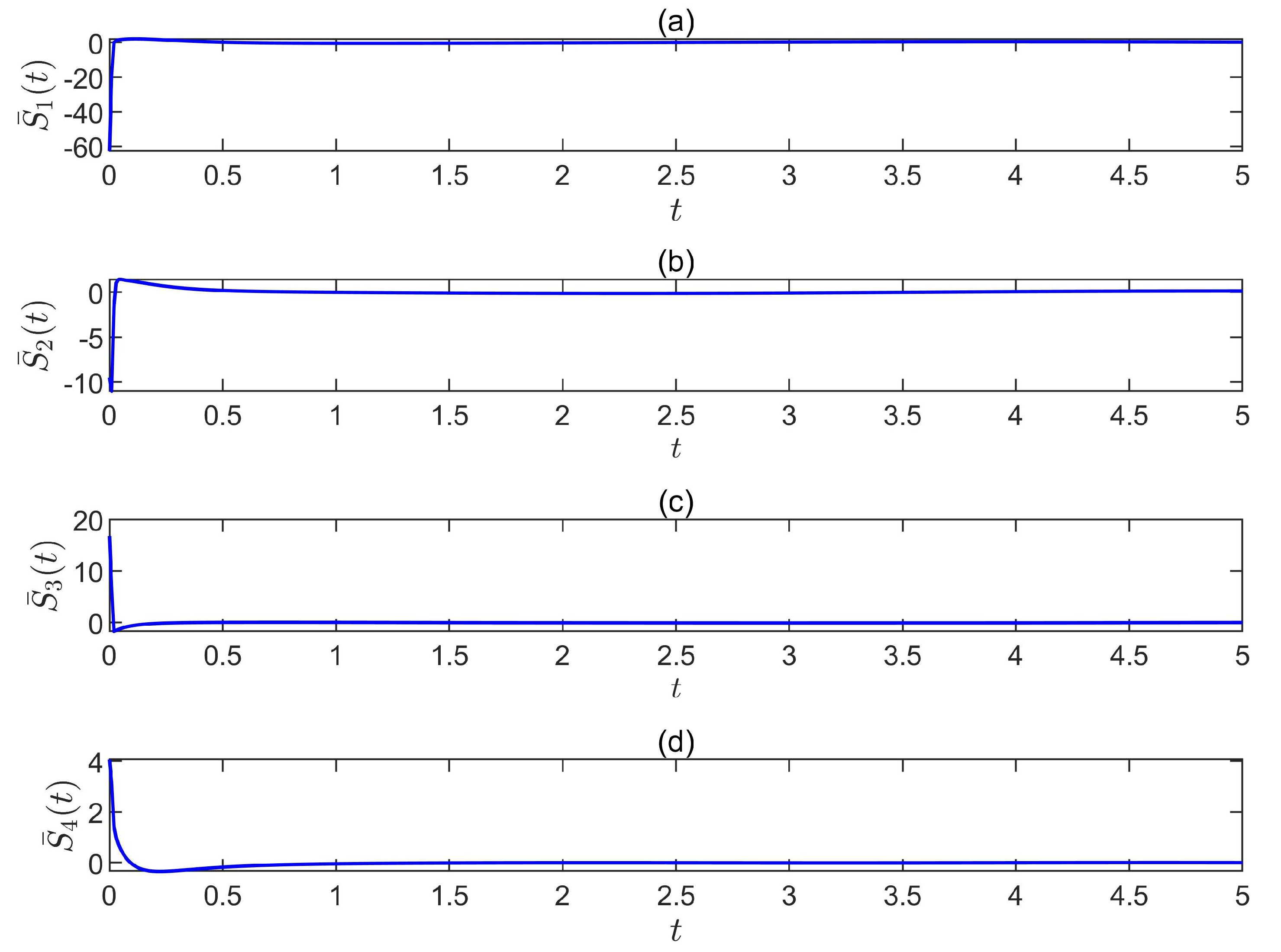
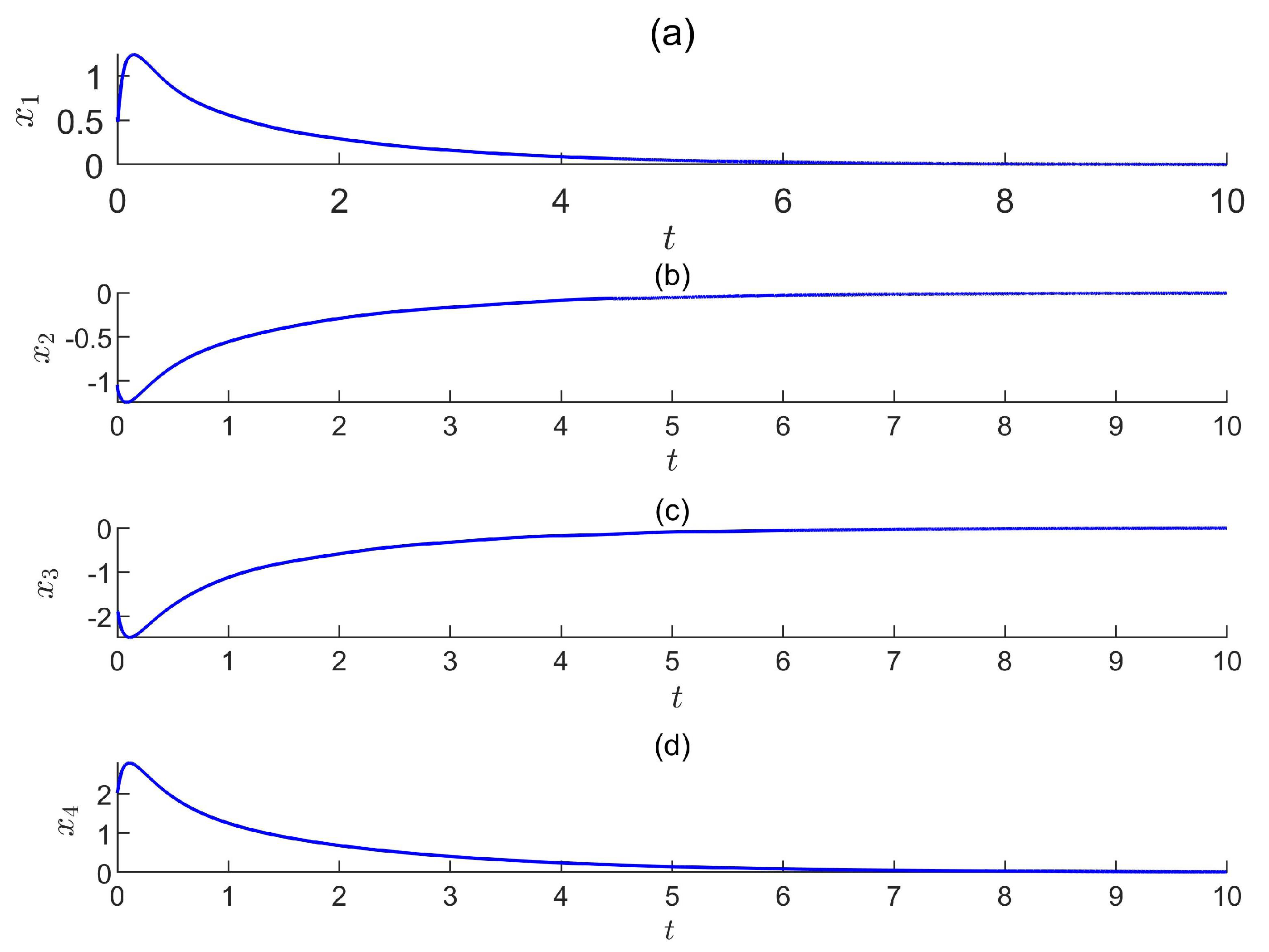
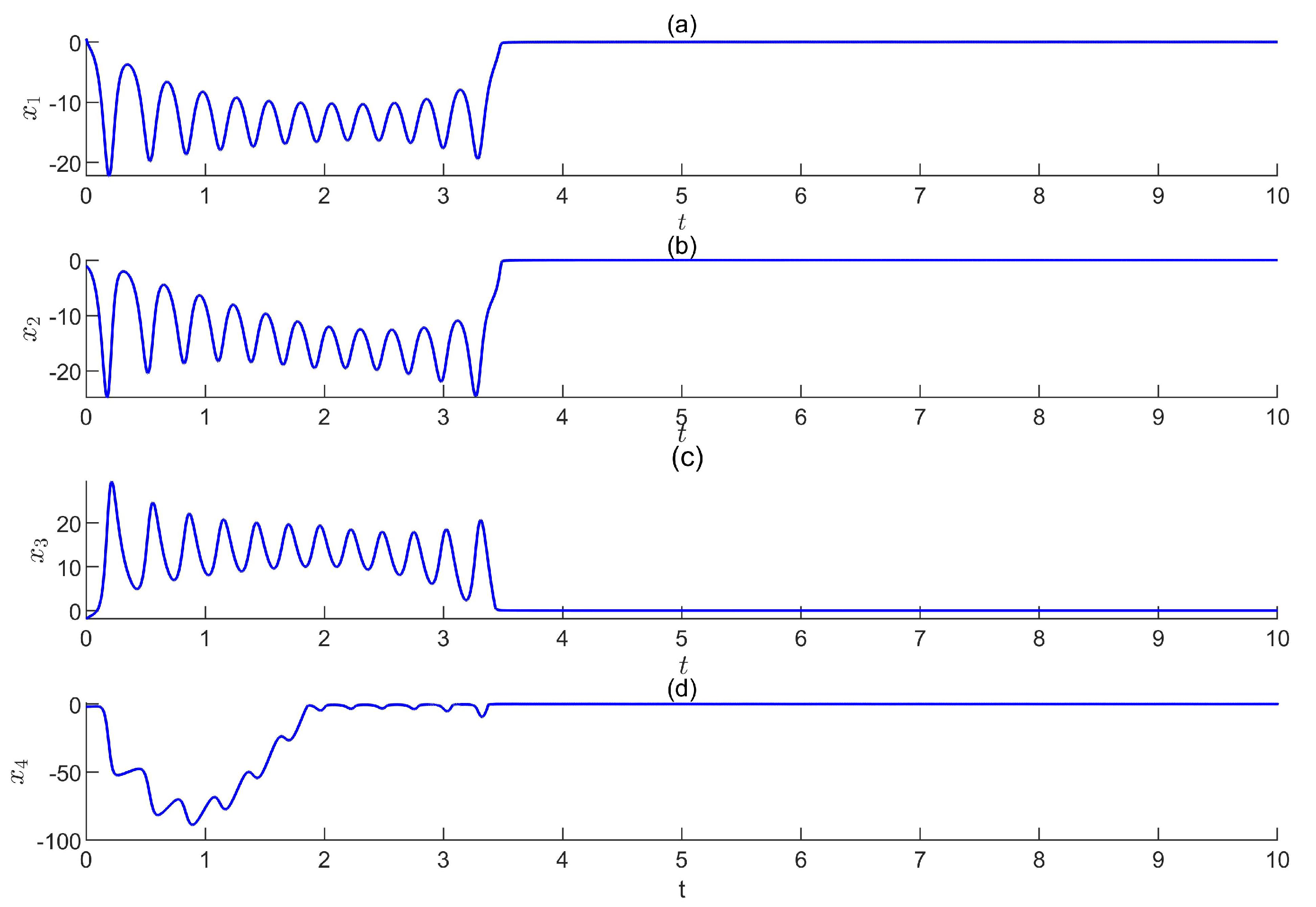
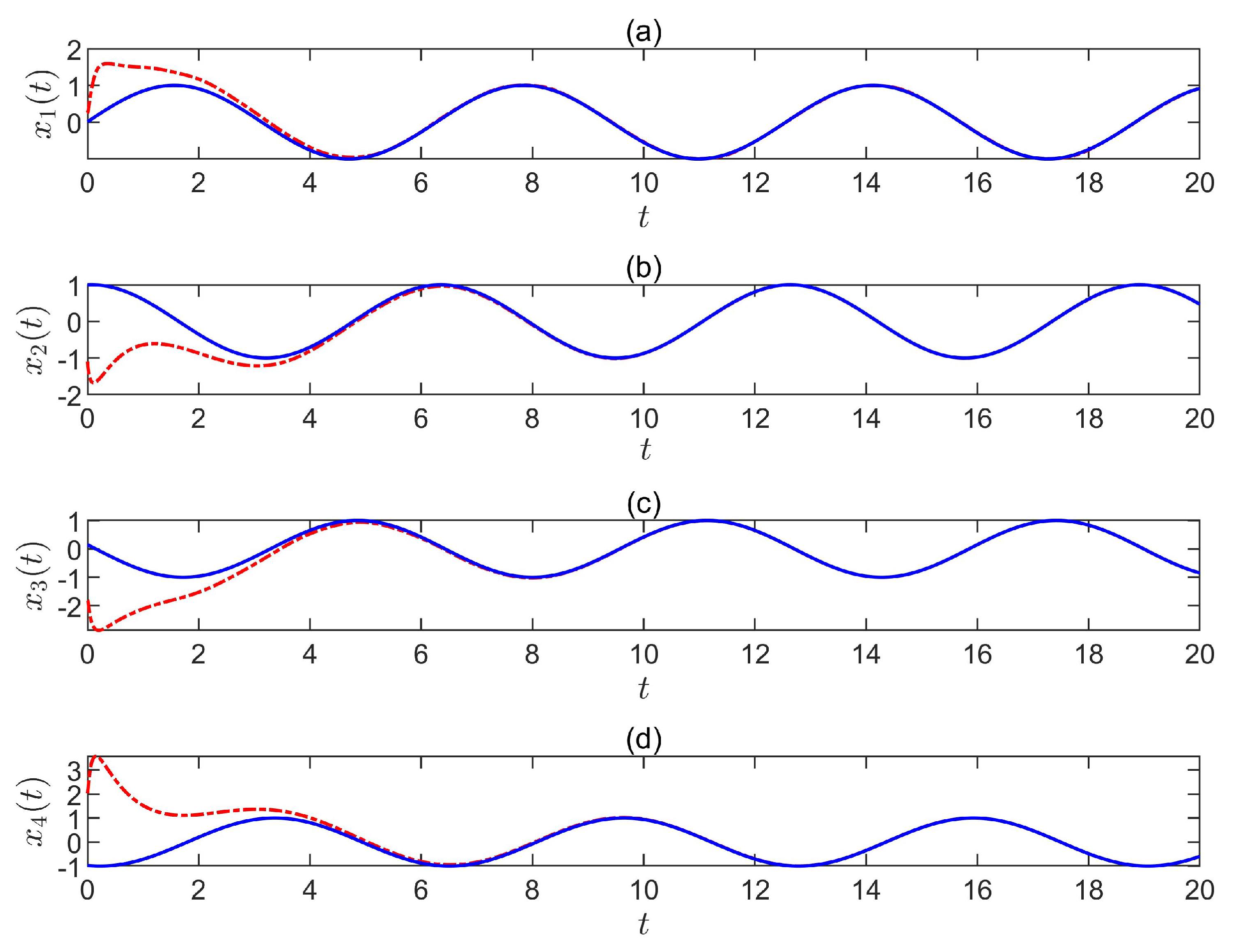
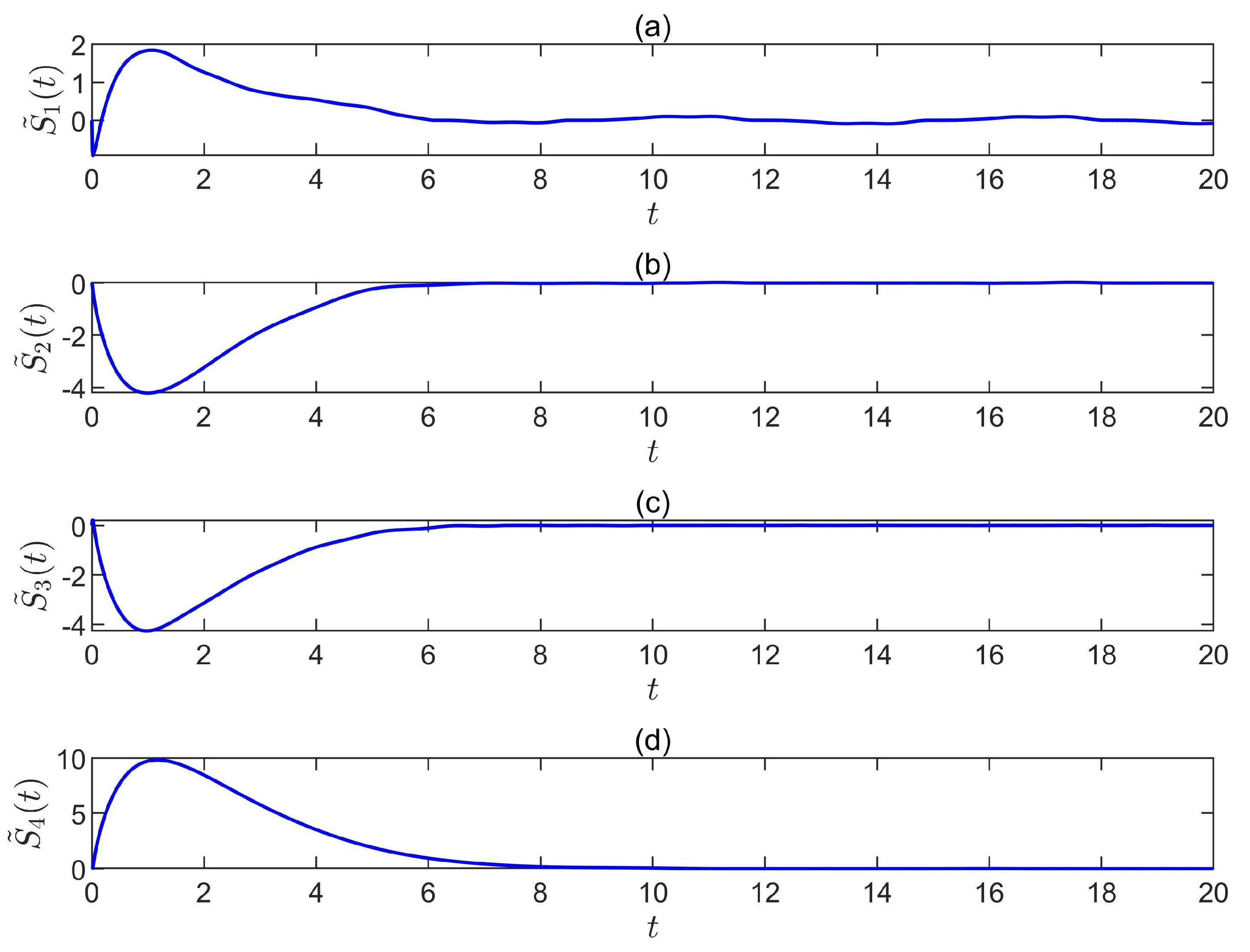
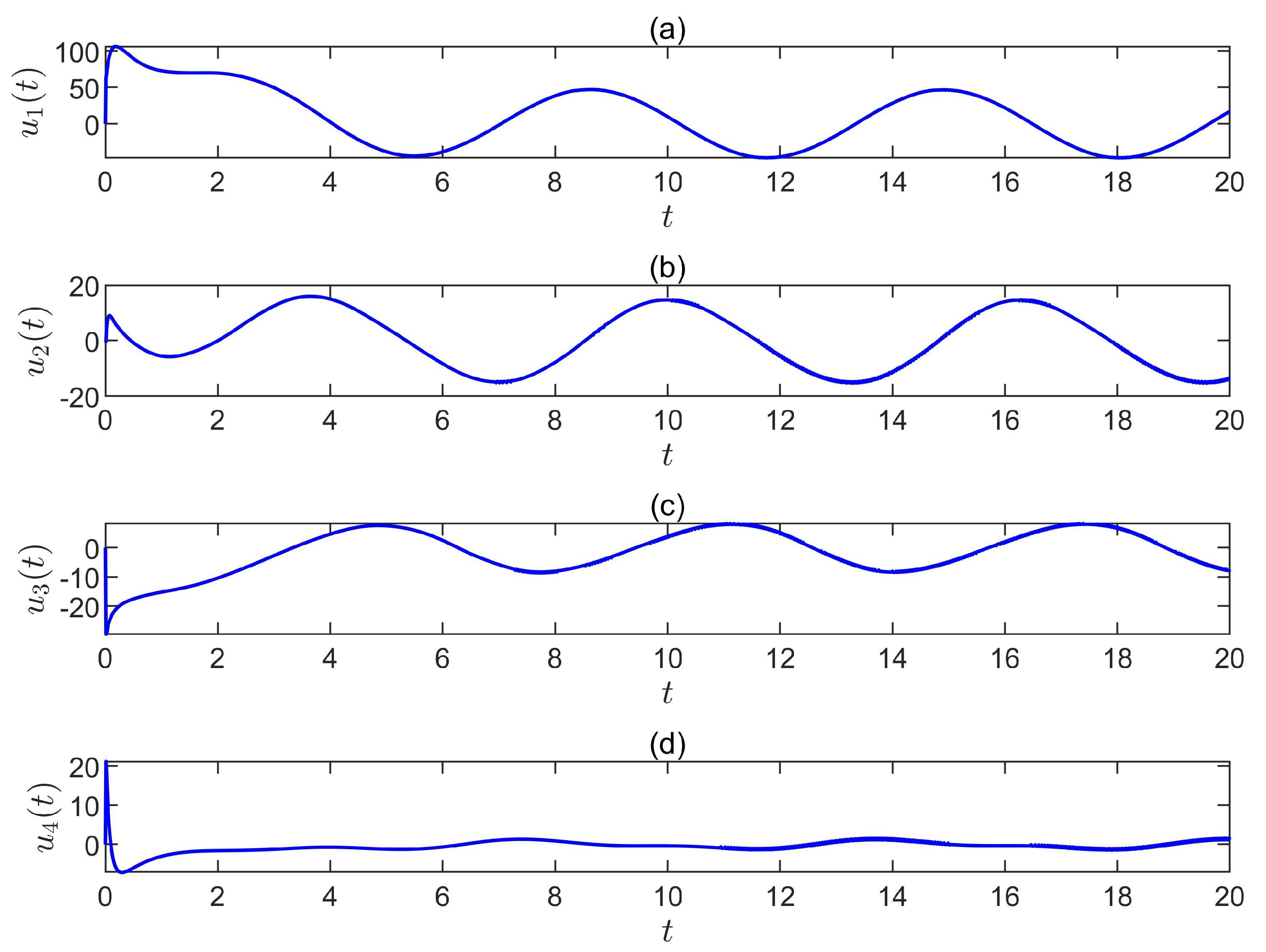
5. Simulation Results
5.1. The First-Type Sliding-Mode Control Scheme
5.2. The Second-Type Sliding-Mode Control Law
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FO | Fractional Order |
| CO | Constant Order |
| VO | Variable Order |
| SMC | Sliding-Mode Control |
| GSMC | Global Sliding-Mode Control |
References
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations. In North-Holland Mathematics Studies; Elsevier Science B.V.: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Kumar, S.; Kumar, R.; Cattani, C.; Samet, B. Chaotic behaviour of fractional predator-prey dynamical system. Chaos Solitons Fractals 2020, 135, 109811. [Google Scholar] [CrossRef]
- Jiang, J.; Cao, D.; Chen, H.; Zhao, K. The vibration transmissibility of a single degree of freedom oscillator with nonlinear fractional order damping. Int. J. Syst. Sci. 2017, 48, 2379–2393. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. arXiv 2016, arXiv:1602.03408. [Google Scholar] [CrossRef] [Green Version]
- Ilhan, E.; Kıymaz, I.O. A generalization of truncated M-fractional derivative and applications to fractional differential equations. Appl. Math. Nonlinear Sci. 2020, 5, 171–188. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Cao, D.; Chen, H. The fixed point approach to the stability of fractional differential equations with causal operators. Qual. Theory Dyn. Syst. 2015, 15, 3–118. [Google Scholar] [CrossRef]
- Aghili, A. Complete solution for the time fractional diffusion problem with mixed boundary conditions by operational method. Appl. Math. Nonlinear Sci. 2020, 6, 9–20. [Google Scholar] [CrossRef] [Green Version]
- Kaur, D.; Agarwal, P.; Rakshi, M.; Chand, M. Fractional calculus involving p,q-Mathieu type series. Appl. Math. Nonlinear Sci. 2020, 5, 15–34. [Google Scholar] [CrossRef]
- Günerhan, H.; Çelik, E. Analytical and approximate solutions of fractional partial differential-algebraic equations. Appl. Math. Nonlinear Sci. 2020, 5, 109–120. [Google Scholar] [CrossRef]
- Agarwal, R.; O’Regan, D.; Hristova, S. Stability of Caputo fractional differential equations by Lyapunov functions. Appl. Math. 2015, 60, 653–676. [Google Scholar] [CrossRef] [Green Version]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Jiang, J.; Li, H.; Zhao, K.; Cao, D.; Guirao, J.L. Finite time stability and sliding mode control for uncertain variable fractional order nonlinear systems. Adv. Differ. Equ. 2021, 2021, 127. [Google Scholar] [CrossRef]
- Jiang, J.; Guirao, J.L.; Saeed, T. The existence of the extremal solution for the boundary value problems of variable fractional order differential equation with causal operator. Fractals 2020, 28, 2040025. [Google Scholar] [CrossRef]
- Jiang, J.; Guirao, J.L.G.; Chen, H.; Cao, D. The boundary control strategy for a fractional wave equation with external disturbances. Chaos Solitons Fractals 2019, 121, 92–97. [Google Scholar] [CrossRef]
- Soon, C.M.; Coimbra, C.F.M.; Kobayashi, M.H. The variable viscoelasticity oscillator. Ann. Phys. 2005, 14, 378–389. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, G.; Shi, H.; Wang, Q.; Su, J.; Miao, H. Finite-time active disturbance rejection control for marine diesel engine. Appl. Math. Nonlinear Sci. 2020, 5, 35–46. [Google Scholar] [CrossRef]
- Ingman, D.; Suzdalnitsky, J. Control of damping oscillations by fractional differential operator with time-dependent order. Comput. Methods Appl. Mech. Eng. 2004, 193, 5585–5595. [Google Scholar] [CrossRef]
- Coimbra, C.F. Mechanics with variable-order differential operators. Ann. Phys. 2003, 12, 692–703. [Google Scholar] [CrossRef]
- Lorenzo, C.F.; Hartley, T.T. Initialization, Conceptualization, and Application in the Generalized (Fractional) Calculus; NASA/TP-1998-208415; NASA: Washington, DC, USA, 1998.
- Sakakibara, S. Properties of vibration with fractional derivative damping of order 1/2. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 1997, 40, 393–399. [Google Scholar] [CrossRef] [Green Version]
- Odzijewicz, T.; Malinowska, A.B.; Torres, D.F.M. Fractional variational calculus of variable order. In Advances in Harmonic Analysis and Operator Theory; Springer: Berlin/Heidelberg, Germany, 2013; pp. 291–301. [Google Scholar]
- Li, C.; Chen, G. Chaos in the fractional order Chen system and its control. Chaos Solitons Fractals 2004, 22, 549–554. [Google Scholar] [CrossRef]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives, Theory and Applications; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Ortigueira, M.D.; Valério, D.; Machado, J.T. Variable order fractional systems. Commun. Nonlinear Sci. Numer. Simul. 2019, 71, 231–243. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y.; Zhou, S. Adaptive backstepping H-∞ tracking control with prescribed performance for internet congestion. ISA Trans. 2018, 72, 92–99. [Google Scholar] [CrossRef] [PubMed]
- Doyle, J.C.; Francis, B.A.; Tannenbaum, A.R. Feedback Control Theory; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Jiang, J.; Cao, D.; Chen, H. Sliding mode control for a class of variable-order fractional chaotic systems. J. Frankl. Inst. 2020, 357, 10127–10158. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef] [Green Version]
- Dong, R.Q.; Wu, A.G.; Zhang, Y.; Duan, G.R. Anti-unwinding sliding mode attitude control via two modified Rodrigues parameter sets for spacecraft. Automatica 2021, 129, 109642. [Google Scholar] [CrossRef]
- Lee, J.W.; Xuan-Mung, N.; Nguyen, N.P.; Hong, S.K. Adaptive altitude flight control of quadcopter under ground effect and time-varying load: Theory and experiments. J. Vib. Control 2021. [Google Scholar] [CrossRef]
- Mostafavi, S.; Ansarifar, G. Pressurizer water level control with estimation of primary circuit coolant mass in nuclear power plants via robust observer based dynamic sliding mode control. Ann. Nucl. Energy 2021, 161, 108413. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K.; Nguyen, N.P.; Le, T.L. Autonomous quadcopter precision landing onto a heaving platform: New method and experiment. IEEE Access 2020, 8, 167192–167202. [Google Scholar] [CrossRef]
- Edwards, C.; Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Labbadi, M.; Cherkaoui, M. Robust adaptive backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Trinh, V.C.; Le, T.D. An Adaptive Fast Terminal Sliding Mode Controller of Exercise-Assisted Robotic Arm for Elbow Joint Rehabilitation Featuring Pneumatic Artificial Muscle Actuator. Actuators 2020, 9, 118. [Google Scholar] [CrossRef]
- Bayramoglu, H.; Komurcugil, H. Time-varying sliding-coefficient-based terminal sliding mode control methods for a class of fourth-order nonlinear systems. Nonlinear Dyn. 2013, 73, 1645–1657. [Google Scholar] [CrossRef]
- Jie, W.; Yudong, Z.; Yulong, B.; Kim, H.H.; Lee, M.C. Trajectory tracking control using fractional-order terminal sliding mode control with sliding perturbation observer for a 7-DOF robot manipulator. IEEE/ASME Trans. Mechatron. 2020, 25, 1886–1893. [Google Scholar] [CrossRef]
- Haq, I.U.; Khan, Q.; Khan, I.; Akmeliawati, R.; Nisar, K.S.; Khan, I. Maximum power extraction strategy for variable speed wind turbine system via neuro-adaptive generalized global sliding mode controller. IEEE Access 2020, 8, 128536–128547. [Google Scholar] [CrossRef]
- Liu, W.; Feng, Z.; Bi, A. A novel nonsingular terminal sliding mode control combined with global sliding surface for uncertain nonlinear second-order systems. Trans. Inst. Meas. Control 2020, 42, 1294–1300. [Google Scholar] [CrossRef]
- Liu, L.; Han, Z.; Li, W. Global sliding mode control and application in chaotic systems. Nonlinear Dyn. 2009, 56, 193–198. [Google Scholar] [CrossRef]
- Boukattaya, M.; Gassara, H.; Damak, T. A global time-varying sliding-mode control for the tracking problem of uncertain dynamical systems. ISA Trans. 2020, 97, 155–170. [Google Scholar] [CrossRef]
- Cong, B.; Liu, X.; Chen, Z. Disturbance observer based time-varying sliding mode control for uncertain mechanical system. J. Syst. Eng. Electron. 2012, 23, 108–118. [Google Scholar] [CrossRef]
- Singh, J.P.; Roy, B.K. Second order adaptive time varying sliding mode control for synchronization of hidden chaotic orbits in a new uncertain 4-D conservative chaotic system. Trans. Inst. Meas. Control 2018, 40, 3573–3586. [Google Scholar] [CrossRef]
- Zhao, W.; Ren, X.; Wang, S. Parameter estimation-based time-varying sliding mode control for multimotor driving servo systems. IEEE/ASME Trans. Mechatron. 2017, 22, 2330–2341. [Google Scholar] [CrossRef]
- Bartoszewicz, A.; Nowacka-Leverton, A. Time-Varying Sliding Modes for Second and Third Order Systems; Springer: Berlin/Heidelberg, Germany, 2009; Volume 382. [Google Scholar]
- Lu, Y.S.; Chiu, C.W.; Chen, J.S. Time-varying sliding-mode control for finite-time convergence. Electr. Eng. 2010, 92, 257–268. [Google Scholar] [CrossRef]
- Eray, O.; Tokat, S. The design of a fractional-order sliding mode controller with a time-varying sliding surface. Trans. Inst. Meas. Control 2020, 42, 3196–3215. [Google Scholar] [CrossRef]
- Hua, C.; Chen, J.; Guan, X. Fractional-order sliding mode control of uncertain QUAVs with time-varying state constraints. Nonlinear Dyn. 2019, 95, 1347–1360. [Google Scholar] [CrossRef]
- Hammouch, Z.; Yavuz, M.; Özdemir, N. Numerical solutions and synchronization of a variable-order fractional chaotic system. Math. Model. Numer. Simul. Appl. 2021, 1, 11–23. [Google Scholar] [CrossRef]
- Khanzadeh, A.; Pourgholi, M. A novel continuous time-varying sliding mode controller for robustly synchronizing non-identical fractional-order chaotic systems precisely at any arbitrary pre-specified time. Nonlinear Dyn. 2016, 86, 543–558. [Google Scholar] [CrossRef]
- Sun, G.; Ma, Z. Practical tracking control of linear motor with adaptive fractional order terminal sliding mode control. IEEE/ASME Trans. Mechatron. 2017, 22, 2643–2653. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Haghighi, A.R.; Roohi, M. Stabilisation of unknown fractional-order chaotic systems: An adaptive switching control strategy with application to power systems. IET Gener. Transm. Distrib. 2015, 9, 1883–1893. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, J.; Xu, X.; Zhao, K.; Guirao, J.L.G.; Saeed, T.; Chen, H. The Tracking Control of the Variable-Order Fractional Differential Systems by Time-Varying Sliding-Mode Control Approach. Fractal Fract. 2022, 6, 231. https://doi.org/10.3390/fractalfract6050231
Jiang J, Xu X, Zhao K, Guirao JLG, Saeed T, Chen H. The Tracking Control of the Variable-Order Fractional Differential Systems by Time-Varying Sliding-Mode Control Approach. Fractal and Fractional. 2022; 6(5):231. https://doi.org/10.3390/fractalfract6050231
Chicago/Turabian StyleJiang, Jingfei, Xin Xu, Kun Zhao, Juan L. G. Guirao, Tareq Saeed, and Huatao Chen. 2022. "The Tracking Control of the Variable-Order Fractional Differential Systems by Time-Varying Sliding-Mode Control Approach" Fractal and Fractional 6, no. 5: 231. https://doi.org/10.3390/fractalfract6050231