1. Introduction
The H-Galerkin space-time mixed finite element method is investigated for the one-dimensional semilinear convection–diffusion–reaction problem. The initial boundary value problem considered in this article is as follows.
Find
such that
where
, and
, with
. The functions
,
, and
are smooth. And
in which
and
are positive constants.
is a known initial value function. We suppose that the nonlinear function
satisfies
, and there exists a positive constant
C, such that
Additionally, we presume that the Lipschitz condition is satisfied by the nonlinear function
, that is, there exists a Lipschitz constant
L, such that
As we know, convection–diffusion–reaction equations play an important role in describing mass and heat transport processes and reflect a wide range of physical phenomena. It is widely used in many practical fields, for example, environmental science, electronic science, energy development, hydrology, fluid dynamics, chemistry, biology, etc. [
1,
2]. This kind of equation is formed when chemical reactions occur within a fluid flow. Nonlinear equations usually cannot be solved precisely; hence, it is necessary to establish and research numerical methods for an approximate solution. This encourages us to build and study efficient numerical methods for this category of nonlinear PDEs. These include but are not limited to the finite difference method [
3], the adaptive finite volume element method [
4], the adaptive iterative splitting method [
5], and so on. When the diffusion parameter is very small, however, the numerical solutions produced by these approaches are insufficient and show non-physical oscillations. Due to this, numerous stabilized finite element methods were developed, for instance, the stabilized finite element method [
6], discontinuous Galerkin time stepping with local projection stabilization [
7], weak Galerkin flux-based mixed finite element method [
8], semi-Lagrangian discontinuous Galerkin
-local DG method [
9], space-time ultra-weak discontinuous Galerkin method [
10], weak Galerkin finite element method [
11], modified finite volume method [
12], least-squares mixed element method [
13], and the Galerkin/Least-Squares method [
14], and so on.
In 1998, Pani [
15] presented a type of H
-Galerkin mixed finite element approach. In essential ways, this strategy differs from standard mixed methods. First, the H
-Galerkin mixed finite element gains the selection range of finite element space and no longer requires that the finite element space has at least C
continuity. Second, the LBB consistency condition is ignored. Third, approximation finite element spaces
and
may have various polynomial degrees. Lastly, the mesh generation of finite elements does not require regularity requirements. Due to its multiple benefits, this method has been used to obtain numerical solutions to a variety of problems. In Ref. [
16], Manickam investigated the semilinear reaction–diffusion problem using a higher-order exclusively discrete scheme paired with the H
-Galerkin mixed finite element method. A priori error estimates for the semidiscrete scheme were studied. An implicit Runge–Kutta method was used for the temporal direction for full discretization, and the error estimates for both components were addressed. Furthermore, the H
-Galerkin mixed finite element method was used to study the second-order hyperbolic equations [
17], the heat conduction problem [
18], the nonlinear Sine-Gordon equations [
19], the regularized long wave equation [
20], the second-order elliptic equations [
21], two-dimensional time fractional diffusion equations [
22], the Sobolev equations [
23], the nonlinear Sobolev equation [
24], and so on.
In these studies, the H
-Galerkin mixed finite element method was used for the discretization of the space variable, and the Euler, Crank–Nicolson, or Runge–Kutta difference method was used in the time discrete formula. One of the disadvantages of these kinds of approximate schemes is that high-order accuracy in time cannot be obtained, which results in the mismatch of the convergence order between time and space discrete. A type of space-time finite element method is presented to overcome these defects. In the space-time scheme, the finite element method is employed in both time and space discretize and the high-order precision for space and time can be obtained simultaneously. The space-time method has been used to solve some time-dependent issues, for example, the traditional continuous space-time finite element method for the heat equation [
25], the reduced-order method combined with the space-time finite element method for the 2D Sobolev equation [
26], a high-order space-time ultra-weak discontinuous Galerkin method for the second-order wave equation [
10], an H
discontinuous space-time finite element method for convection–diffusion equations [
27], and so on. In these studies, the analysis technique of interpolation polynomials is introduced to prove the space-time error estimate. Here, we will perform this by introducing a space-time projection operator which is different from the above methods.
In this paper, we first obtain a coupled system equivalent to problem
by introducing the auxiliary variable
. The H
-Galerkin space-time mixed finite element method is established for the coupled system
. The mixed finite element method is extended to the space-time method here. It is a new try for a semilinear convection–diffusion–reaction problem solving by a kind of method combining the H
-Galerkin mixed method with a space-time finite element scheme. The analysis technique in this paper is different from those studies in which the interpolation technique is utilized to obtain the error of the corresponding unknown function [
10,
27]. The uniqueness of the approximate solutions u and q are proven. We obtain the
norm optimal order error estimates by introducing the space-time projections and proving the properties of these operators. The numerical example is given to demonstrate the effectiveness of the algorithm as well as the reasonableness of the theoretical analysis conclusions. Furthermore, by comparing with the classical H
-Galerkin mixed finite element scheme, the proposed scheme can easily improve computational accuracy and time convergence order by changing the basis function.
The structure of this paper is as follows. The research state of the space-time finite element method and the H
-Galerkin mixed finite element method, as well as the primary content of this study, are discussed in
Section 1. In
Section 2, we give some definitions of Sobolev spaces and the corresponding norms required for theoretical analysis in this paper. The H
-Galerkin space-time mixed finite element scheme of the semilinear convection–diffusion–reaction equation is given and the uniqueness of the approximate solutions
u and
q are demonstrated. In
Section 3, the
norm optimal order error estimates of the finite element solutions
u and
q are provided. In
Section 4, a numerical example is given to verify the validity and feasibility of the scheme. Finally, some conclusions are made in
Section 5.
2. H-Galerkin Space-Time Mixed Finite Element Scheme
Here, we will go over some fundamental concepts and definitions to understand the H
-Galerkin space-time mixed finite element method of Equation
as well as the theoretical analysis of the numerical solutions. All of the Sobolev spaces and norms used in this paper are customary [
28,
29].
We will use the classical Sobolev spaces
,
, as
where
. The corresponding norm is given by
when
, let
.
is called the
space, when
. The corresponding inner product
and norm
are defined as
and
The space
is defined as
In addition, we also need to introduce the following space-time Sobolev spaces.
the corresponding norm
is defined as
In particular, when
,
, the corresponding norms are recorded as
and
To establish the H
-Galerkin space-time mixed finite element method for the problem
, we first discretize the space and time domain
. Let
, subdividing the time interval
into the subintervals
,
. This division is represented as
, and the division unit is denoted as
Q. The time step is
Further, we subdivide the space interval
into the subintervals
,
. This division is written as
, and the division unit is denoted by
K. The space step is
Let
and
, representing the space composed of piecewise continuous polynomial functions of degree
m defined on the subdivision
for the space interval
I, that is,
where
denotes the polynomial space defined on
K, that degree
.
Let
and
, denoting the space composed of piecewise continuous polynomials functions of degree
l defined on the subdivision
for the time interval
, that is,
where
denotes the polynomial space defined on
Q, whose degree
.
Let
, which is known as the space-time slab.
and
represent the piecewise polynomial space of
and
, respectively, defined on the space-time slab
. On this basis,
and
denote the space-time approximation polynomial space on each space-time slab
, that is,
To produce the H-Galerkin mixed space-time scheme, the semilinear convection–diffusion–reaction equation is split into a lower-order system by introducing the auxiliary variable . Then, Equation can be restated as the following equivalent first-order differential system.
Find
,
such that
where
,
.
Let
and
. Multiplying the formula (a) in Equation
by
, and the formula (b) in Equation
by
, we obtain the following weak form:
For
in the formula (b) of Equation
, using integration by parts, and the Dirichlet boundary condition
, we have
Similarly, for
in the formula (b) of Equation
, using integration by parts, and the Dirichlet boundary condition
, we have
where
,
.
Bringing Equations
and
into the formula (b) of Equation
, we can obtain
Furthermore, when , we can reformulate Equation as follows.
Find
, such that
As a consequence, the semidiscrete H-Galerkin space-time mixed finite element scheme for Equation can be expressed as follows.
Find
:
, such that
Summing Equation
from 1 to
N, we can obtain
when
, we have
Theorem 1. Equation has a unique solution.
Proof of Theorem 1. Assuming that
is another solution of Equation
, we obtain
In the formula (a) of Equation
, taking
, we have
Using Cauchy’s inequality, we obtain
In the formula (b) of Equation
, choosing
, then
Using Cauchy’s inequality and Equation
, we obtain
Owing to
, combining with Equation
, we have
According to Gronwall’s Lemma, we have , thus . Owing to , through Equation , we thus have . Therefore, Equation has a unique solution. Then, we complete the proof. □
3. Error Estimations of Approximate Solution
We first give several associated space-time projections and prove their properties to analyze the error estimation of
. Introduce the Ritz projection
, which ensures that if
,
satisfies
In the sense of the
inner product, the above operator can be further extended to space-time projection
(for simplicity, we still denote the space-time projection as
, the same as below). Then
is defined as
Further, we introduce the projection
, such that if
, then
satisfies
Similarly, it can be further extended to space-time projection
, such that
Lemma 1 ([25,
28,
30,
31]).Let and be defined as Equations (24)–(27)
, then the following conclusions can be established. (1) Suppose , such that (2) Suppose , there exists a positive constant C independent of the time step k, satisfying (3) Suppose , there exists a positive constant C independent of the space step h, satisfying (4) Suppose , such that (5) Suppose , such that (6) Suppose , , such that Proof of (1) in Lemma 1. For
, we obtain
We can obtain the result .
Further, let
be an arbitrary function with
, then
Then .
Let
be an arbitrary function with
, we obtain
Indeed, we obtain the result .
Further, for
, we have
Then .
Similarly, for
, we have
Therefore, we can obtain the result .
For
, it holds that
Taking
in Equation
, we obtain
Using the Schwartz’s inequality, we have
Then, we can obtain .
Taking
in Equation
, we obtain
By Cauchy’s inequality, we can obtain .
The conclusion of Equation (1) in Lemma 1 is proven. Combining Equations and , we obtain the scheme . The remaining conclusions in Lemma 1 are the standard results of finite element analysis. □
To give an error estimate of
, first of all, we give the equation that the error
satisfies. From the formula (a) of Equations
and
, we can obtain
The error is split as follows to determine error estimates for semidiscrete approximations . Since the estimates of are known from Lemma 1, it is enough to estimate . We first give the equation that satisfies.
Lemma 2. Suppose and be defined as (24)–(27)
, if , , it obtains Proof of Lemma 2. According to Lemma 1 and Equation
, we have
The conclusion of Lemma 2 is proven. □
Lemma 3. Let , then we obtain an error estimate of θ Proof of Lemma 3. Taking
in Equation
of Lemma 2, we obtain
Applying H
lder’s inequality and Cauchy’s inequality, we have
Owing to
, we obtain
Then, we complete the proof. □
To consider the error estimate of the intermediate variable
. We introduce the Ritz projection
, such that if
,
satisfies
And the approximation properties of
are satisfied
In the sense of
, the above operator can be further extended to space-time projection
defined below
We introduce projection
, such that if
, then
satisfies
The following approximation properties hold.
In the sense of
inner product,
defined in Equation
can be further extended to space-time projection
defined as below
Lemma 4 ([25,
28,
30,
31]).
Let and be defined as Equations –, then the following conclusion can be established. (1) Suppose , then (2) Suppose , then it holds that (3) Suppose , then (4) Suppose , and , , we have Proof of (1) in Lemma 4. Let
, we obtain
Indeed, we can obtain the result .
Further, let
be an arbitrary function with
; therefore, we have
Then .
Let
, then
In fact, we can obtain the result .
Further, let
, then we have
Then .
Let
, and we have
So that .
Let
, then we have
So that .
Let
, then we have
The conclusion of Equation (1) in Lemma 4 is proven. The remaining conclusions in Lemma 4 are the standard results of finite element analysis. □
To prove an error estimation of
, we first present the error equation
satisfied. By the formula (b) of Equations
and
, we obtain
The error split as follows to determine error estimates for semidiscrete approximations . From Lemma 4, it is sufficient to estimate because the estimations of are known. To analyze , we first give the equation that satisfies.
Lemma 5. and defined as Equations –, for , , then Proof of Lemma 5. According to Lemma 4 and Equation
, we obtain
The proof is then completed. □
Theorem 2. Let q and be the solutions of Equations (9)
and (12)
, respectively. For , , then the following estimation holds. Proof of Theorem 2. Selecting
in Equation
of Lemma 5, we obtain
Applying H
lder’s inequality and Cauchy’s inequality, and noticing the Lipschitz conditions
f satisfied, yields
Using the triangle inequality, we find that
Using the Gronwall’s Lemma, we have
Combining Lemmas 1 and 4, we obtain
The conclusion in Theorem 2 is proven. □
Based on Theorem 2, with the error estimate of , and satisfying Equation , the following theorem can be obtained.
Theorem 3. Let u and be the solutions of Equations and , respectively. Then
, and , we can obtain In Lemma 3, we have already discussed the estimation of , so we only need to substitute Equation into Equation , and we can obtain Theorem 3.
Through the conclusions of Theorem 2, Lemma 4, Theorem 3, and Lemma 1, we can obtain the norm error estimate of and .
Theorem 4. Let q, u, and , be the solutions of Equations (9) and (12), respectively.
,
and . Then we obtain an error estimate of Based on the relative error estimation results of and , when , we have an overall error estimate conclusion.
Corollary 1. The following estimation formulas are established with the assumptions of Theorems 2 and 3. 4. Numerical Experiments
Consider the initial boundary value problem of the semilinear convection–diffusion–reaction equation
where the diffusion coefficient
is positive and the source term
. The exact solution is
and
, where
.
The proposed method in this work combines time and space variables, so the 1D problem can be viewed as a 2D problem. Here, the space-time domain
is partitioned into
rectangular elements. The space-time linear and quadratic polynomial basis functions are taken in this experiment. Here, the convergence orders are calculated by using the following formula
where
is the error and
is the step size.
First, we consider the order of convergence in space direction. For this purpose, a sufficiently small fixed time step
k is fixed (ensuring that the time part of the error is a very small percentage of the overall error), and the space grid parameter
h is reduced by half.
Table 1 gives the errors and convergence orders of
and
in the
norm for the linear polynomial basis functions with a fixed time step
, respectively. It can be seen from
Table 1 that the convergence orders of
and
are close to the second-order under the
norm. Similarly, the errors and space convergence orders for a quadratic basis function with the fixed time step
are presented in
Table 2. Nearly third-order convergence rates can be seen from
Table 2.
Next, we consider the order of convergence in time direction. Hence, a small fixed space step
h is taken, and then the time step
k is decreased in a certain proportion.
Table 3 gives the errors and convergence orders of
and
in the
norm for the linear polynomial basis functions with a fixed time step
, respectively. It can be seen from
Table 3 that the convergence orders of
and
are also close to the second-order under the
norm. Similarly, the errors and the convergence orders for a quadratic basis function with a fixed space step
are given in
Table 4. Nearly third-order convergence rates can also be seen in
Table 4. These numerical results are consistent with the theoretical analysis results of Theorem 4.
Further,
Table 5 gives the errors and convergence orders of
and
in the
norm for the quadratic polynomial basis functions with the same mesh size
, respectively. Nearly third-order convergence rates can also be seen from
Table 5.
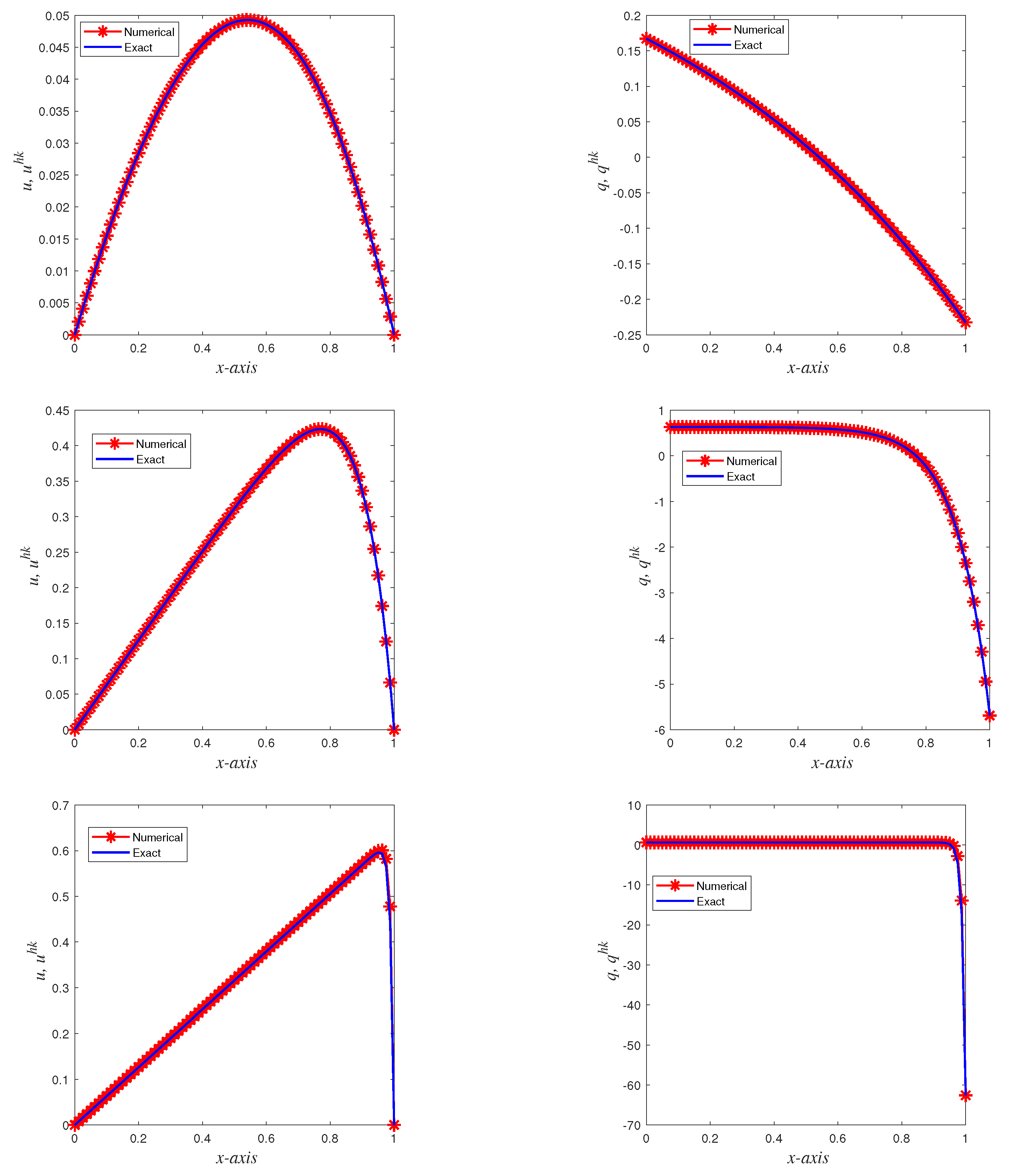
Figure 1 shows the comparison between the numerical solutions
and the exact solutions
with step sizes
under the space-time linear basis functions for
,
, and
, respectively. From the figure, the numerical solution is a good simulation of the exact solution.
When the diffusion parameter
is sufficiently small, however, the scheme will be unstable. That is, there will be oscillations produced in areas with large gradient changes. Thus, we need to introduce a stabilizing term in the scheme to deal with this phenomenon. For example, we can use the local projection stabilization technique [
7,
32].
Furthermore, we compare the proposed method with the traditional H
-Galerkin mixed finite element method combined with the Crank–Nicolson time difference discretization from the perspective of the time direction convergence orders and errors at the final time
. The numerical results for the piecewise linear polynomial basis functions are given in
Table 6 and
Table 7. These numerical data show that the errors of the proposed method
and that of the traditional method
are almost identical and present an almost second-order convergence order in the time direction.
However, one can observe from the data obtained by using the piecewise quadratic polynomial basis functions in
Table 8 and
Table 9 that the errors of the proposed method are almost one order of magnitude smaller than that of the traditional method. Moreover, the time direction convergence order of the proposed method is close to third-order, while that of the traditional method is still close to second-order since it uses the Crank–Nicolson scheme in the time direction. This implies that the proposed method in this paper can improve the convergence order and calculation accuracy by increasing the polynomial degree of the basis functions and allowing large time steps. Therefore, the space-time mixed H
-Galerkin scheme proposed in this paper is superior to the traditional mixed H
-Galerkin scheme.





{kind=link}