


Disturbance Observer-Based Event-Triggered Adaptive Command Filtered Backstepping Control for Fractional-Order Nonlinear Systems and Its Application



Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
2.1. Fractional Calculus
2.2. Fuzzy Logic Systems
2.3. Problem Formulation
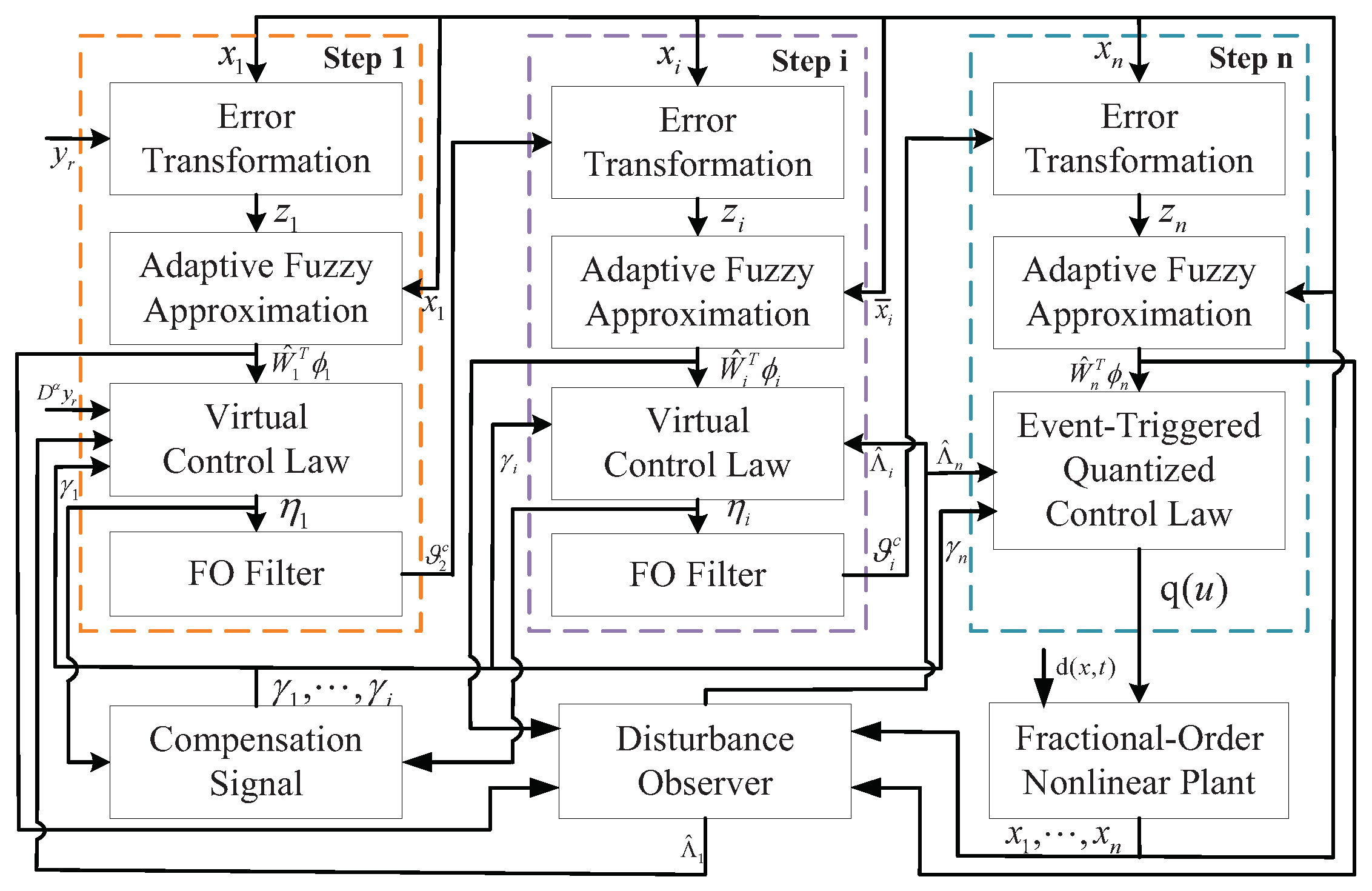
3. Main Results
NDO-Based Event-Triggered Adaptive Command-Filtered Quantized Control Design
- Case (I):
- : for this case, the following two sub-cases need to be discussed.
- Case (i):
- : according to Lemma 4 with , we can obtain
- Case (ii):
- , the following inequality holds in accordance with the relationship in Lemma 4
- Case (II):
- : for this case, we have . Therefore, a similar result can be obtained by referring to Case (i) in Case (I).
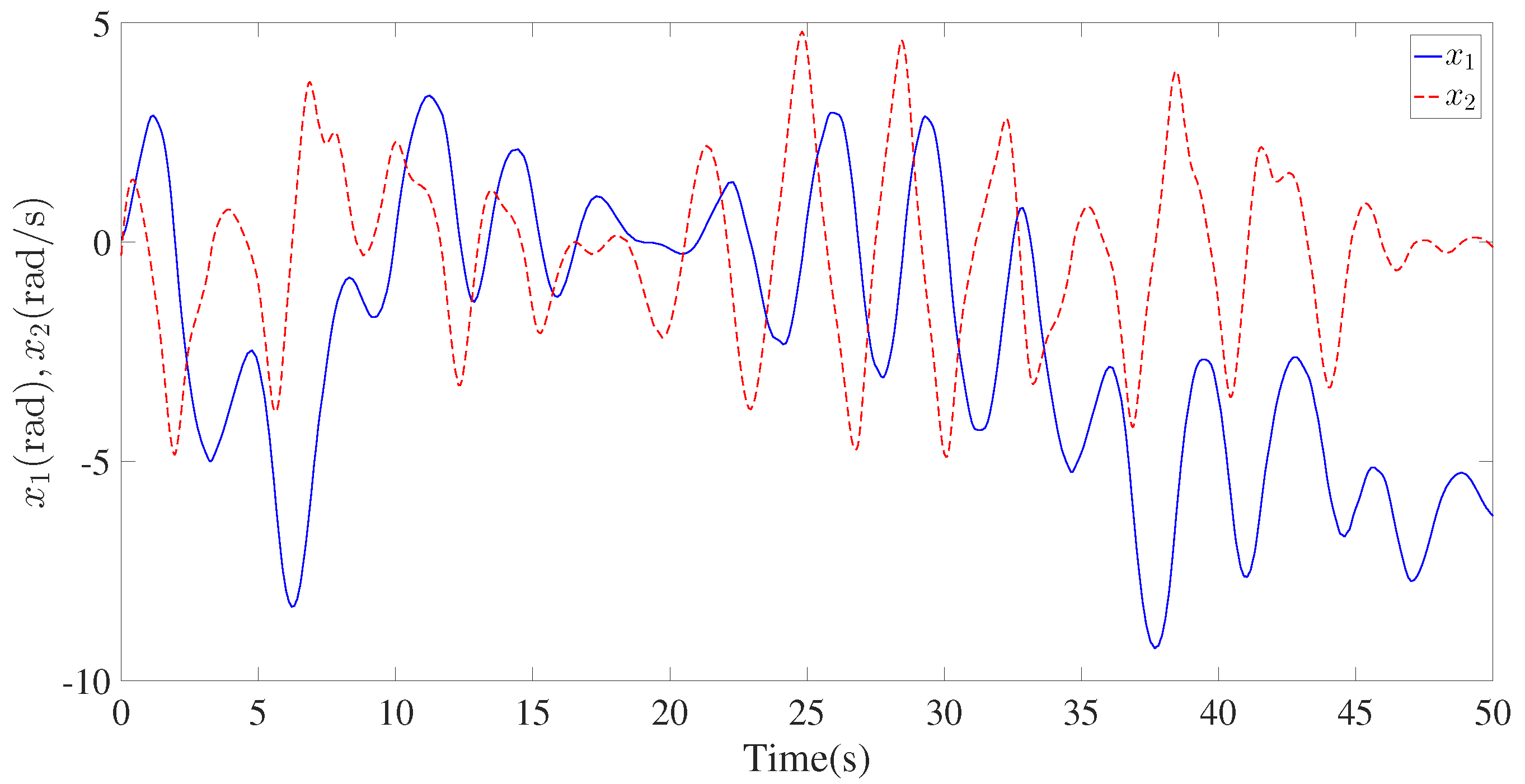
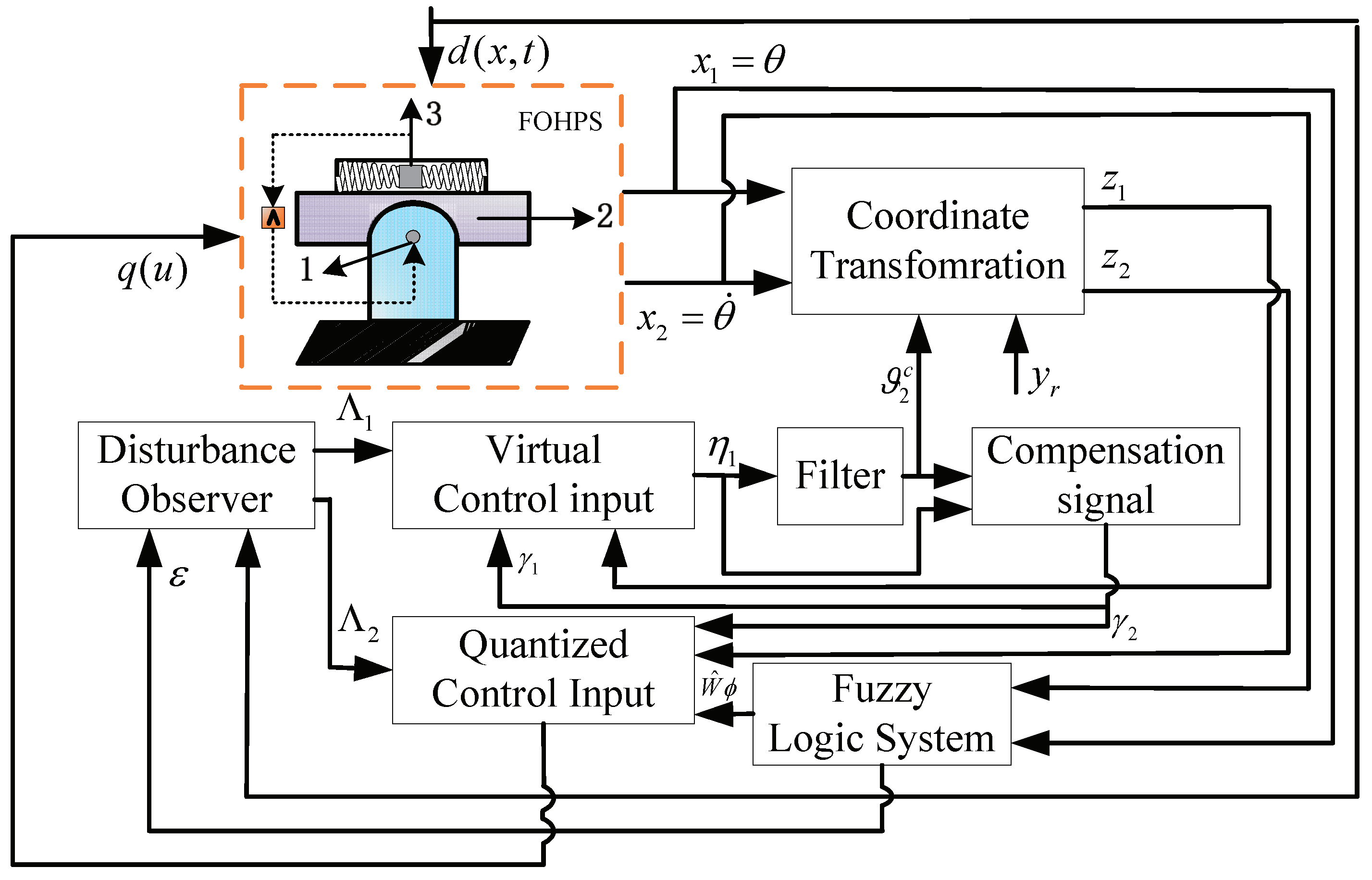
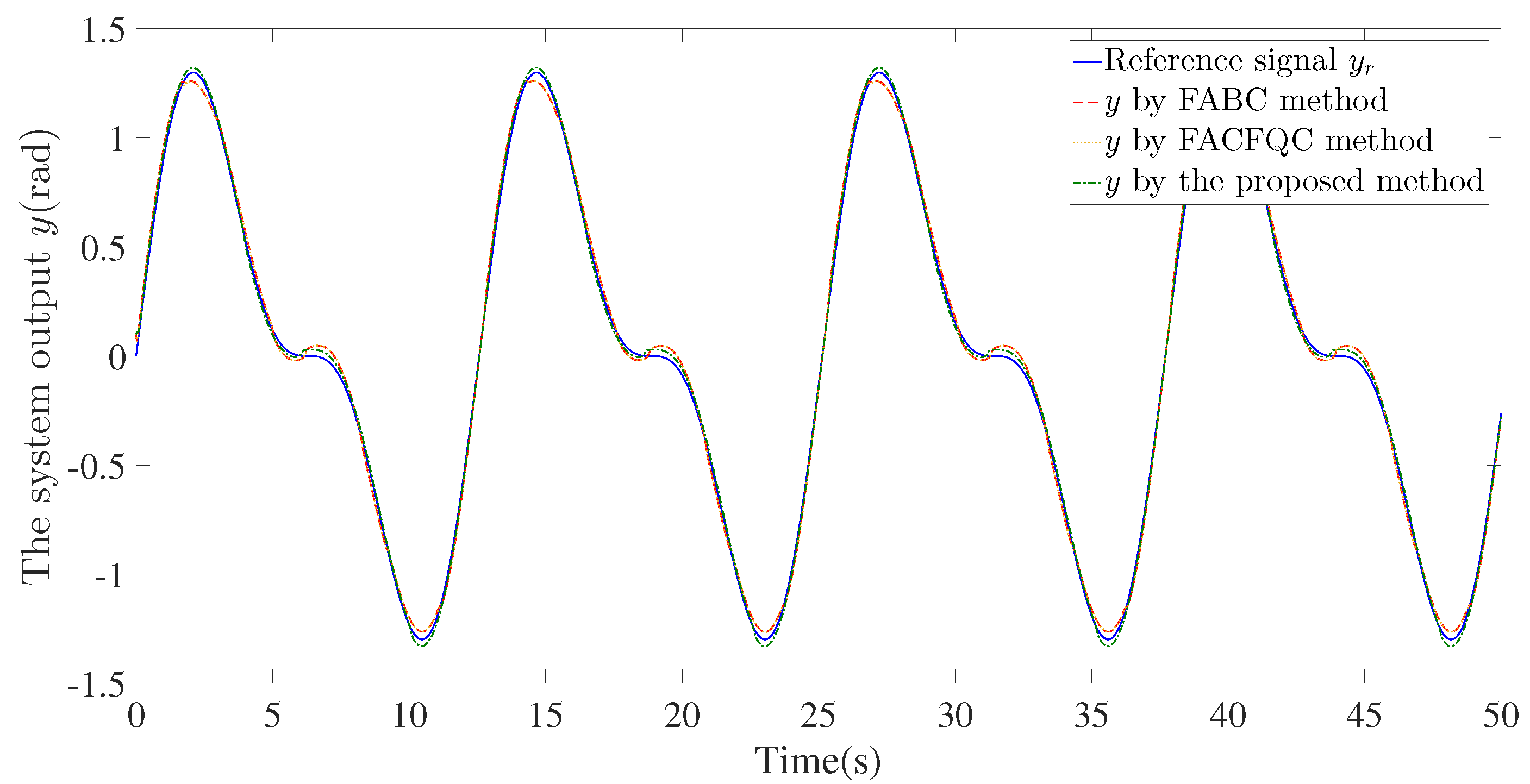
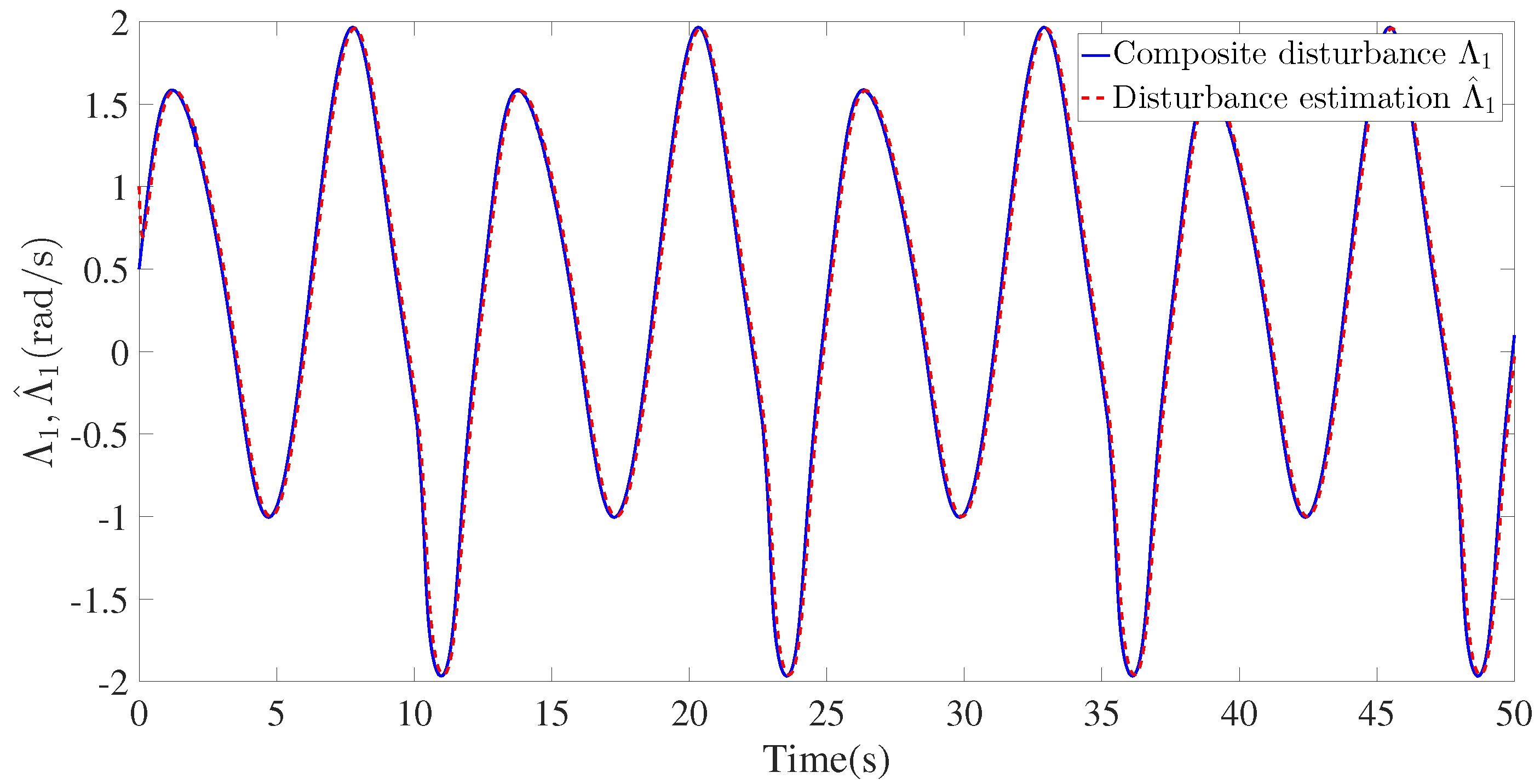
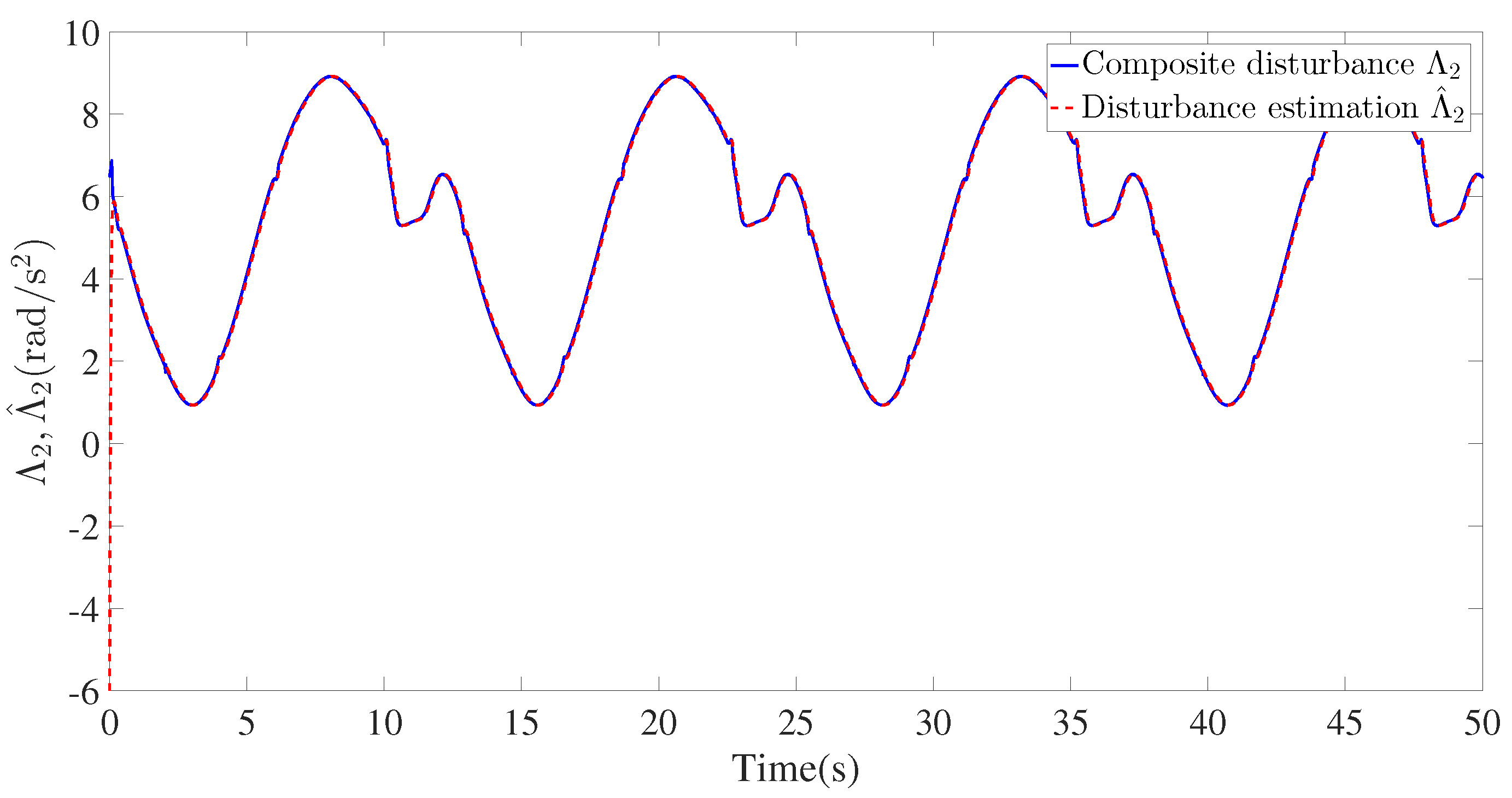
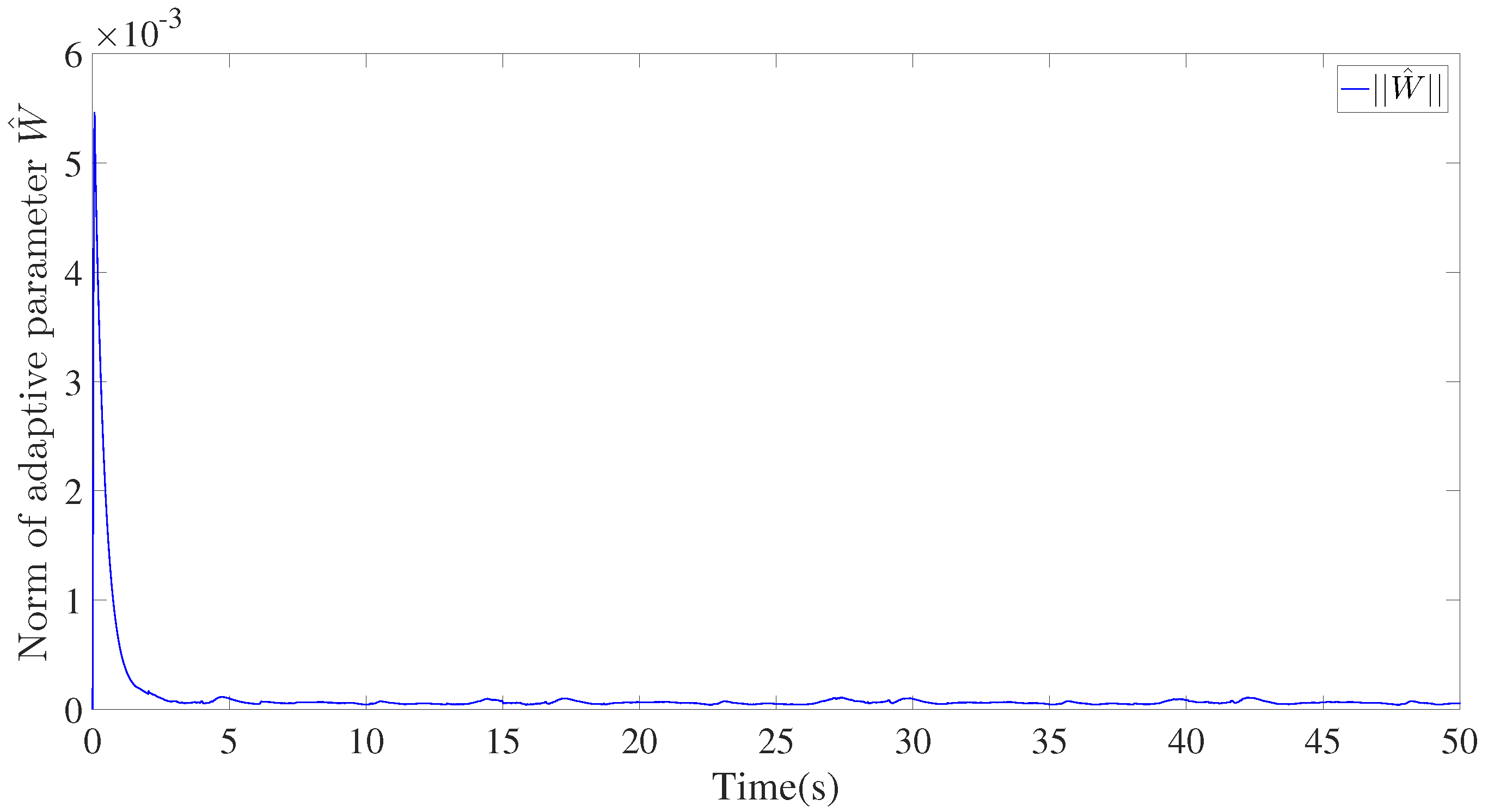
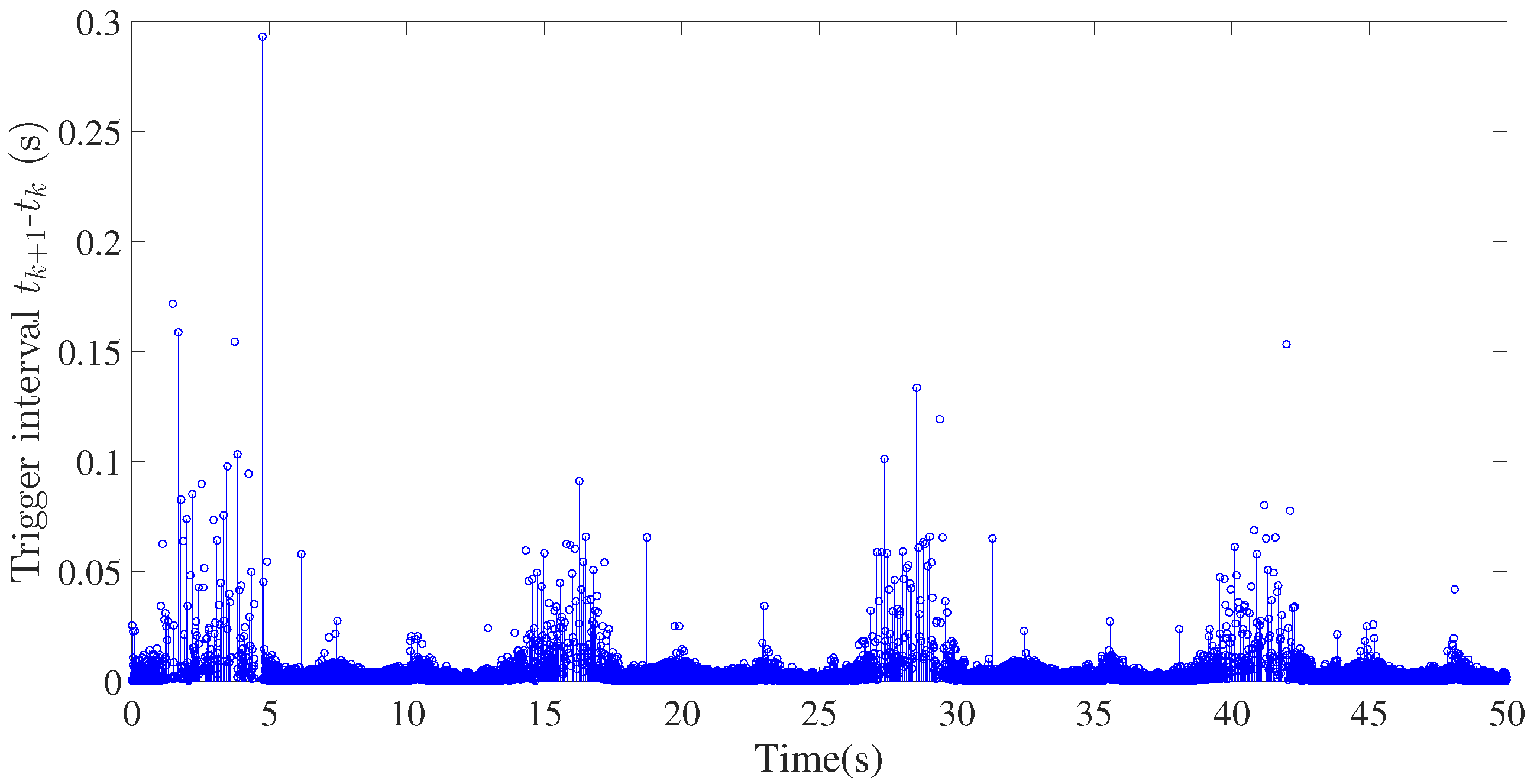
4. Simulation Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tejado, I.; Pérez, E.; Valério, D. Fractional calculus in economic growth modeling of the group of seven. Fract. Calc. Appl. Anal. 2019, 22, 139–157. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, W. Adaptive Neural Network Sliding Mode Control for Nonlinear Singular Fractional Order Systems with Mismatched Uncertainties. Fractal Fract. 2020, 4, 50. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Cao, J.; Arefi, M.M. Adaptive neural output-feedback control for nonstrict-feedback time-delay fractional-order systems with output constraints and actuator nonlinearities. Neural Netw. 2018, 105, 256–276. [Google Scholar] [CrossRef] [PubMed]
- Bao, H.; Park, J.H.; Cao, J. Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 2015, 82, 1343–1354. [Google Scholar] [CrossRef]
- Lin, C.; Chen, B.; Shi, P.; Yu, J. Necessary and sufficient conditions of observer-based stabilization for a class of fractional-order descriptor systems. Syst. Control. Lett. 2018, 112, 31–35. [Google Scholar] [CrossRef]
- Coronel-Escamilla, A.; Gomez-Aguilar, J.F.; Stamova, I.; Santamaria, F. Fractional order controllers increase the robustness of closed-loop deep brain stimulation systems. Chaos Solut. Fractals 2020, 140, 110149. [Google Scholar] [CrossRef]
- Luo, S.; Lewis, F.L.; Song, Y.; Ouakad, H.M.J. Accelerated adaptive fuzzy optimal control of three coupled fractional-order chaotic electromechanical transducers. IEEE Trans. Fuzzy Syst. 2021, 29, 1701–1714. [Google Scholar] [CrossRef]
- Zouari, F.; Ibeas, A.; Boulkroune, A.; Cao, J.; Arefi, M.M. Neural network controller design for fractional-order systems with input nonlinearities and asymmetric time-varying Pseudo-state constraints. Chaos Solut. Fractals 2021, 144, 110742. [Google Scholar] [CrossRef]
- Wei, Y.; Tse, P.W.; Yao, Z.; Wang, Y. Adaptive backstepping output feedback control for a class of nonlinear fractional order systems. Nonlinear Dyn. 2016, 86, 1047–1056. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Li, S.; Chen, Y. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2209–2217. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Q.; Tong, S. Fuzzy adaptive fault-tolerant control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1372–1379. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C.; Dong, W. Fuzzy finite-time command filtered control of nonlinear systems with input saturation. IEEE Trans. Cybern. 2018, 48, 2378–2387. [Google Scholar] [PubMed]
- Li, Y.; Li, K.; Tong, S. Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO nonstrict feedback systems. IEEE Trans. Fuzzy Syst. 2019, 27, 96–110. [Google Scholar] [CrossRef]
- Qiu, J.; Sun, K.; Rudas, I.J.; Gao, H. Command filter-based adaptive NN control for MIMO nonlinear systems with full-state constraints and actuator hysteresis. IEEE Trans. Cybern. 2020, 50, 2905–2915. [Google Scholar] [CrossRef] [PubMed]
- Niu, B.; Li, H.; Karimi, H.R. Adaptive NN dynamic surface controller design for nonlinear pure-feedback switched systems with time-delays and quantized input. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1676–1688. [Google Scholar] [CrossRef]
- Liu, Y. Adaptive dynamic surface asymptotic tracking for a class of uncertain nonlinear systems. Int. J. Robust Nonlinear Control. 2018, 28, 1233–1245. [Google Scholar] [CrossRef]
- Ma, Z.; Ma, H. Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 28, 122–133. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.; Song, X.; Zhang, Z. Neuro-fuzzy-based adaptive dynamic surface control for fractional-order nonlinear strict-feedback systems with input constraint. IEEE Trans. Syst. Man Cybern. Syst. 2021, 50, 3575–3586. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X. Observer-based adaptive hybrid fuzzy resilient control for fractional-order nonlinear systems with time-varying delays and actuator failures. IEEE Trans. Fuzzy Syst. 2021, 29, 471–485. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J. Composite learning adaptive dynamic surface control of fractional-order nonlinear systems. IEEE Trans. Cybern. 2020, 50, 2557–2567. [Google Scholar] [CrossRef]
- Song, X.; Sun, P.; Song, S.; Stojanovic, V. Finite-time adaptive neural resilient DSC for fractional-order nonlinear large-scale systems against sensor-actuator faults. Nonlinear Dyn. 2023, 111, 12181–12196. [Google Scholar] [CrossRef]
- Xu, B.; Sun, F.; Pan, Y.; Chen, B. Disturbance observer-based composite learning fuzzy control of nonlinear systems with unknown dead zones. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1854–1862. [Google Scholar] [CrossRef]
- Chen, M.; Shao, S.; Shi, P. Disturbance-observer-based robust synchronization control for a class of fractional-order chaotic systems. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 417–421. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Ma, Q.; Zhang, B.; Zhang, Z. Composite-observer-based output-feedback control for nonlinear time-delay systems with input saturation and its application. IEEE Trans. Ind. Electron. 2018, 65, 5856–5863. [Google Scholar] [CrossRef]
- Hou, C.; Liu, X.; Wang, H. Adaptive fault tolerant control for a class of uncertain fractional-order systems based on disturbance observer. Int. J. Robust Nonlinear Control. 2020, 30, 3436–3450. [Google Scholar] [CrossRef]
- Han, S.I. Fuzzy supertwisting dynamic surface control for MIMO strict-feedback nonlinear dynamic systems with supertwisting nonlinear disturbance observer and a new partial tracking error constraint. IEEE Trans. Fuzzy Syst. 2019, 27, 2101–2114. [Google Scholar] [CrossRef]
- Wei, X.; Dong, L.; Zhang, H.; Hu, X.; Han, J. Adaptive disturbance observer-based control for stochastic systems with multiple heterogeneous disturbances. Int. J. Robust Nonlinear Control. 2019, 29, 5533–5549. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Command-filtered fixed-time trajectory tracking control of surface vehicles based on a disturbance observer. Int. J. Robust Nonlinear Control. 2019, 29, 4348–4365. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, F.; Zhang, Y.; Chen, C.L.P. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE Trans. Cybern. 2016, 46, 524–534. [Google Scholar] [CrossRef]
- Liu, W.; Lim, C.C.; Shi, P.; Xu, S. Backstepping fuzzy adaptive control for a class of quantized nonlinear systems. IEEE Trans. Fuzzy Syst. 2017, 25, 1090–1101. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X.; Zhang, Z. Adaptive command filtered neuro-fuzzy control design for fractional-order nonlinear systems with unknown control directions and input quantization. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7238–7249. [Google Scholar] [CrossRef]
- Sui, S.; Chen, C.L.P.; Tong, S.; Feng, S. Finite-time adaptive quantized control of stochastic nonlinear systems with input quantization: A broad learning system based identification method. Int. J. Robust Nonlinear Control. 2020, 67, 8555–8565. [Google Scholar] [CrossRef]
- Xing, L.; Wen, C.; Liu, Z.; Su, H.; Cai, J. Event-triggered adaptive control for a class of uncertain nonlinear system. IEEE Trans. Autom. Control. 2017, 62, 2071–2076. [Google Scholar] [CrossRef]
- Song, X.; Wu, C.; Stojanovic, V.; Song, S. 1 bit encoding–decoding-based event-triggered fixed-time adaptive control for unmanned surface vehicle with guaranteed tracking performance. Control. Eng. Pract. 2023, 135, 105513. [Google Scholar] [CrossRef]
- Hayakawaa, T.; Ishii, H.; Tsumurac, K. Adaptive quantized control for nonlinear uncertain systems. Syst. Control. Lett. 2009, 58, 625–632. [Google Scholar] [CrossRef]
- Song, X.; Wang, M.; Ahn, C.K.; Song, S. Finite-time fuzzy bounded control for semilinear PDE systems with quantized measurements and Markov jump actuator failures. IEEE Trans. Cybern. 2009, 52, 5732–5743. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Li, Y.; Yang, G. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 2016, 96, 23–29. [Google Scholar] [CrossRef]
- Ge, Z.M.; Yu, T.C.; Chen, Y.S. Chaos synchronization of a horizontal platform system. J. Sound Vib. 2003, 268, 731–749. [Google Scholar] [CrossRef]
- Aghababa, M.P. Chaotic behavior in fractional-order horizontal platform systems and its suppression using a fractional finite-time control strategy. J. Mech. Sci. Technol. 2014, 28, 1875–1880. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Nomenclature | Value | Unit |
|---|---|---|---|
| A | Inertia moment of the platform around axis 1 | 0.3 | |
| B | Inertia moment of the platform around axis 2 | 0.5 | |
| C | Inertia moment of the platform around axis 3 | 0.2 | |
| D | Damping coefficient | 0.4 | |
| F | Amplitude of the harmonic torque | 3.4 | |
| g | Acceleration constant of gravity | 9.8 | |
| k | Proportional constant of the accelerometer | 0.11559633 | |
| R | Radius of the Earth | 6,378,000 | |
| Circular frequency of the harmonic torque | 1.8 |
| Design Parameters | Disturbance Terms |
|---|---|
| , , . | , |
| Initial Conditions | |
| , − | |
| Reference Signal | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, S.; Song, X.; Tejado, I. Disturbance Observer-Based Event-Triggered Adaptive Command Filtered Backstepping Control for Fractional-Order Nonlinear Systems and Its Application. Fractal Fract. 2023, 7, 810. https://doi.org/10.3390/fractalfract7110810
Song S, Song X, Tejado I. Disturbance Observer-Based Event-Triggered Adaptive Command Filtered Backstepping Control for Fractional-Order Nonlinear Systems and Its Application. Fractal and Fractional. 2023; 7(11):810. https://doi.org/10.3390/fractalfract7110810
Chicago/Turabian StyleSong, Shuai, Xiaona Song, and Inés Tejado. 2023. "Disturbance Observer-Based Event-Triggered Adaptive Command Filtered Backstepping Control for Fractional-Order Nonlinear Systems and Its Application" Fractal and Fractional 7, no. 11: 810. https://doi.org/10.3390/fractalfract7110810
APA StyleSong, S., Song, X., & Tejado, I. (2023). Disturbance Observer-Based Event-Triggered Adaptive Command Filtered Backstepping Control for Fractional-Order Nonlinear Systems and Its Application. Fractal and Fractional, 7(11), 810. https://doi.org/10.3390/fractalfract7110810