1. Introduction
Many challenges that emerge in natural phenomena, including fluid mechanics, biology, and thermodynamics, can be effectively represented through mathematical models. These models can be translated into a mathematical framework using differential equations. Classifying these differential equations as either linear or non-linear is contingent upon the specific characteristics of the issues that manifest across various scientific domains. In contemporary times, a significant research thrust has been directed towards fractional-order differential equations. Fractional calculus stands as a refined adaptation of classical calculus. Addressing the challenge of solving non-linear fractional-order partial differential equations (FPDE) entails the utilization of a diverse array of both numerical and analytical methods.
Some non-linear fractional partial differential equations exist among these PDEs, such as time-fractional Cahn–Hilliard (TFCH) equations, fractional Burgers–Poisson equations, and BBM Burger equations. The Cahn–Hillard equation was named after Cahn and Hilliard in 1958 [
1]. This equation is critical in order to comprehend a variety of interesting physical phenomena, such as spinodal decomposition, phase ordering dynamics, and phase separation processes. It also explains a critical qualitative distinguishing feature of two-phase systems (see [
1,
2,
3,
4] for a detailed discussion); furthermore, long memory processes and fractional integration in econometrics [
5] and kinetics of phase decomposition processes [
6] have also been discussed. Researchers have investigated mathematical and numerical solutions of TFCH equations [
7,
8,
9,
10,
11] since the appearances of their real-life applications in the abovementioned fields. The fractional Burgers–Poisson (FBP) equation was proposed for the first time in 2004 to describe the propagation of long waves in dispersive media in a single direction [
12]. The FBP equation models a unidirectional water wave with weaker dispersive effects than the KdV equation in shallow water. The BBM–Burger equation defines the mathematical model of the propagation of small-amplitude long waves in non-linear dispersive media.
The BBM equation is a refinement of the KdV equation, as is well known. The wave-breaking models are affected by the BBM–Burger equation and the KdV equation [
13]. Water waves inspired the KdV equation, which was later used as a basis for long waves in a variety of other physical systems. However, the KdV equation was not valid in certain long-wave physical systems. As a result, the BBM–Burger model was proposed, representing unidirectional long-wave propagation in a non-linear dispersive system [
13,
14,
15]. Solving fractional differential equations and fractional partial differential equations has been a significant focus for researchers. Since most fractional differential equations do not have exact analytic solutions, approximate and numerical methods are commonly used [
16,
17,
18], Baleanu et al. discussed the planar system-masses in an equilateral triangle [
19], Ghanim et al. discussed certain implementations in fractional calculus operators, some new extensions on fractional differential and integral properties, and some analytical merits of the Kummer-type function [
20,
21,
22], Almalahi et al. discussed qualitative analysis of the Langevin integro-fractional differential equation [
23], Jajarmi et al. and Sajjadi et al. discussed a new iterative method for the numerical solution of high-order non-linear fractional boundary value problems and fractional optimal control problems with a general derivative operator [
24,
25,
26], and Mohammadi et al. discussed a hybrid functions numerical scheme for fractional optimal control problems [
27]. On the well-posedness of the sub-diffusion equation with the conformable derivative model, mathematical modeling for the adsorption process of the dye removal Laplace–Carson integral transformation for exact solutions [
28,
29,
30,
31] has been discussed in the literature in order to find the numerical and approximate solutions. Many analytical methods have been attempted in order to solve non-linear problems, including the new iterative method (NIM), homotopy perturbation method (HPM), homotopy analysis method (q-HAM), residual power series method (RPSM), and FHATM.
Similarly, using Riemann–Liouville’s (R-L) fractional integral and the Caputo derivative, we present another approach known as the optimal auxiliary function method (OAFM) for higher dimensional equations, which was first introduced by Vasile Marinca and colleagues for thin film flow problem [
32]. Laiq Zada et al. later expanded the approach to partial differential and generalized seventh-order KDV equations [
33]. Several other approaches and models have been developed recently to deal with different types of fractional-order equations and PDEs in general; see [
34,
35,
36,
37]. Auxiliary convergence control parameters and auxiliary functions are included in this approach to control and accelerate the method’s convergence. The OAFM operates without the need for presuming any parameter to be small or large. This proposed technique possesses the benefit of adeptly handling both linear and non-linear challenges while preserving a broad scope of applicability and effectiveness. The rest of this work is structured as follows. We begin with an initial section that provides essential definitions aimed at aiding the readers’ comprehension. Following this, the subsequent section outlines the fundamental concepts underlying the OAFM. Moving forward, in the third section, we apply the OAFM to tackle fractional-order problems, leading to the derivation of valuable solutions that are accurately presented through tables and graphs. Exploring deeper, the fourth and fifth sections provide a comprehensive analysis and discussion of the presented tables and graphs, respectively. Finally, we conclude our study in the sixth section, summarizing the key findings and suggestions drawn from our work.
3. The Basic Idea of the Optimal Auxiliary Function Method
In this paper, we successfully applied the OAFM to solve the analytical approximate non-linear fractional solution of partial differential equations. We consider the most general form of a non-linear differential equation.
The following are the general PDEs:
They are subject to boundary conditions:
In Equation (8), shows the Caputo or R-L operator unknown function while is a known analytic function.
Step 1: To find the approximate solution of Equation (9), we have to consider the approximate solution in the form of two components shown in Equation (10).
Step 2: We arrange an equation to find the zero- and first-order solution (10) into Equation (8). Its results are
Step 3: The initial approximation
can be obtained from the linear equation as
Applying the inverse operator, we obtain
as follows:
Step 4: Expand the non-linear term from Equation (11) in the form of
Step 5: To solve Equation (14) easily and accelerate the convergence of the first-order approximation, we introduce another expression that can be written as follows:
Remark 1. Where and are two auxiliary functions depending upon and the convergence control parameter and .
Remark 2. and are of the form , or the combination of both and , but they are not unique.
Remark 3. If or are the functions of a polynomial, then and are taken as the summation. If or are the exponential functions, then and are taken as the functions of addition of an exponential function. If or are in the form of a trigonometric function, then and are taken as the addition of a trigonometric function. A special case for If then is the exact solution of Equation (10).
Step 6: To find the square of the residual error to obtain the values of
and
we use either the collocation method, the Galerkin method, the Ritz method, or the least square method.
where
R is the residual,
In solving the above equations simultaneously, we obtain the values of the constants .
Remark 4. This powerful tool does not depend on small or large parameters. Our procedure consists of auxiliary functions and which control the convergence of the approximate solution after only one iteration.
4. Numerical Experiments and Results
In this section, we present three problems and demonstrate how their numerical results compare with other methods from the literature.
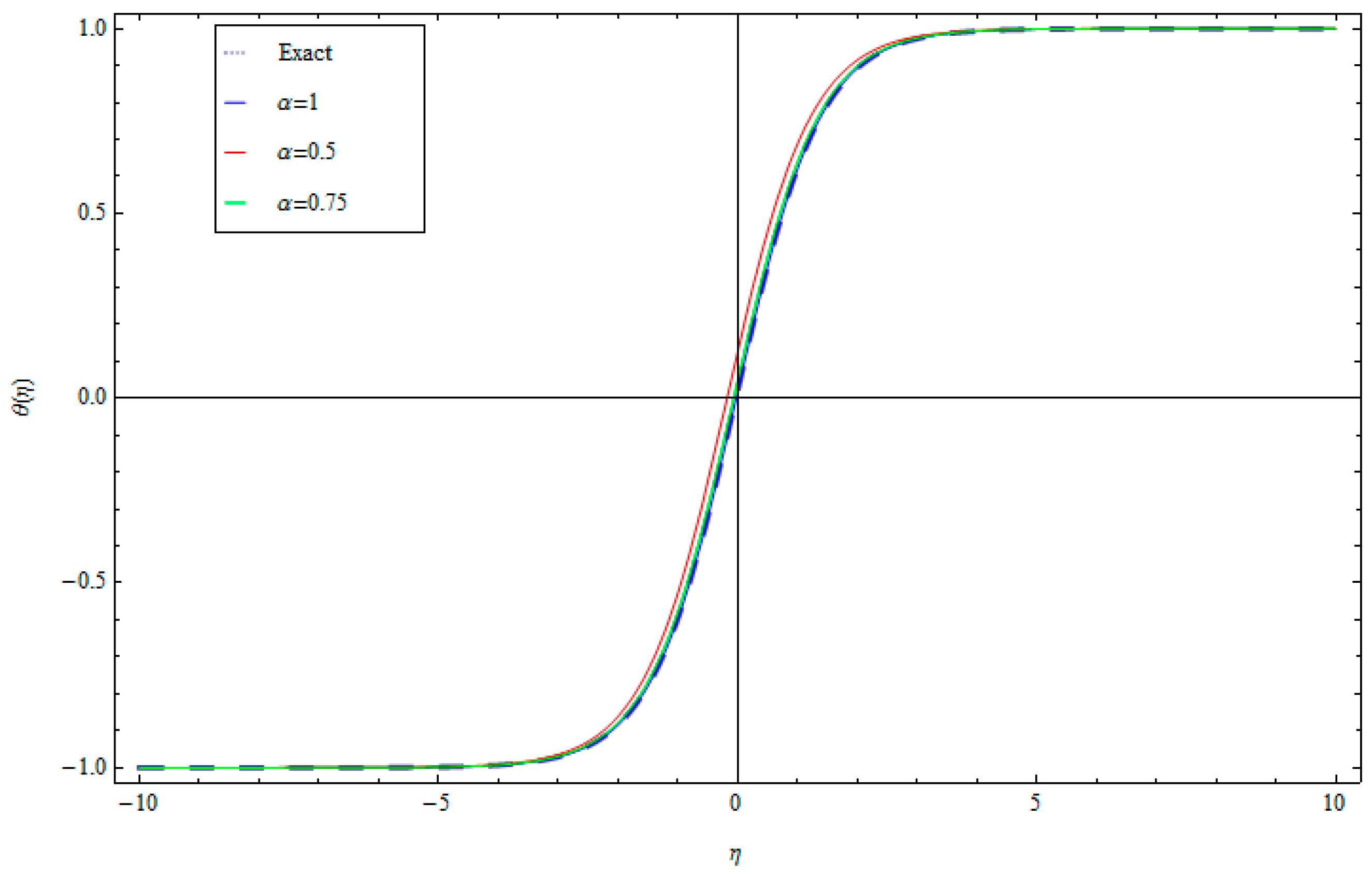
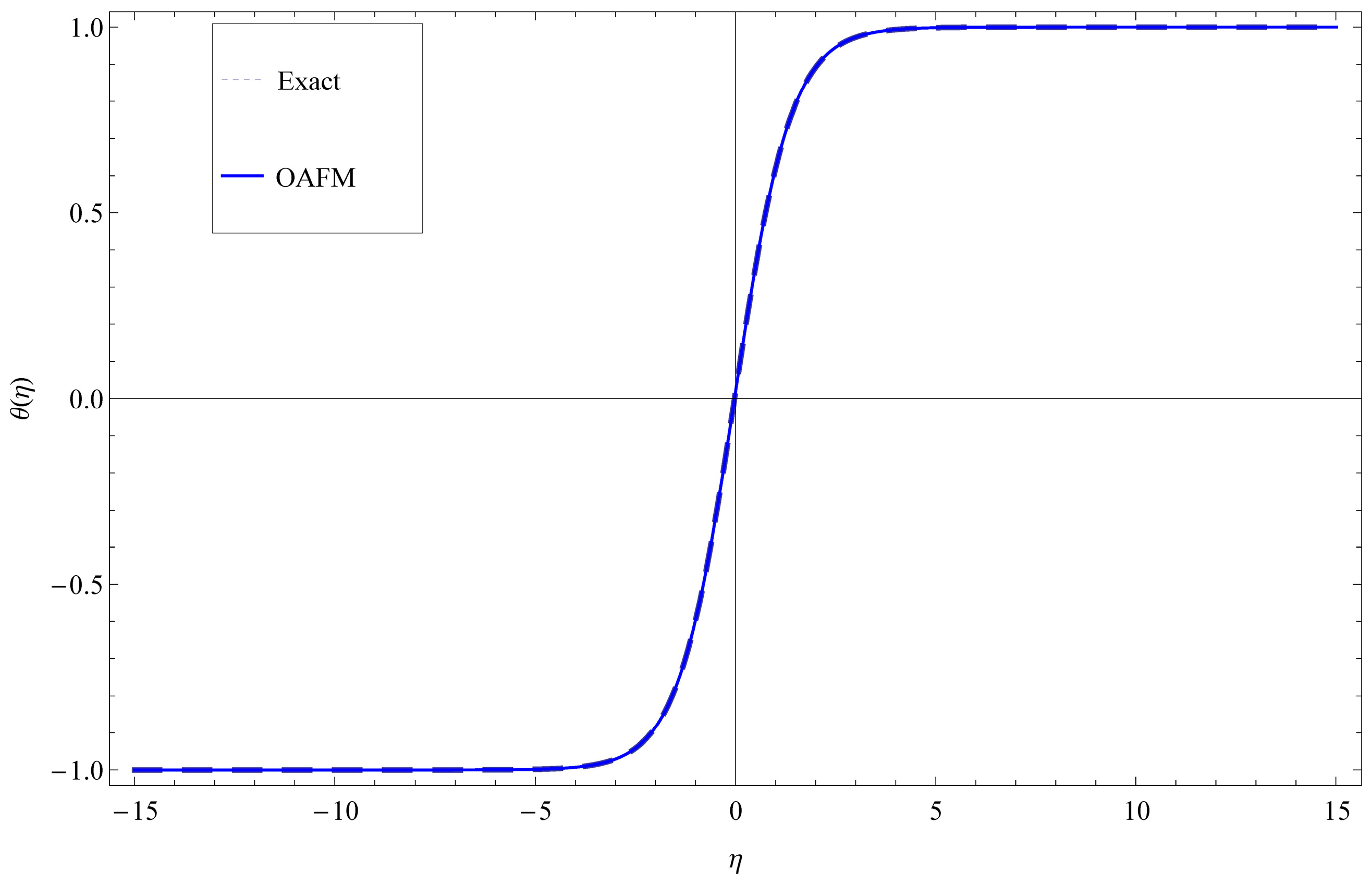
Problem 1. Consider the time-fractional equation of Cahn–Hilliard [39]: Then, it is subject to the initial condition:
The exact solution of Equation (18) when
α,
µ = 1 is
So, Equation (18) can be written as
In Equation (21), we take the linear and non-linear parts as
The initial approximation
is obtained from Equation (12):
In applying the inverse operator as mentioned in Equation (13), we obtain the following solution,
By using Equation (24) in Equation (22), the non-linear operator becomes
The first approximation is given by (15):
Here, we select
and
according to the non-linear operator,
Using Equations (24) and (25) in Equation (26), and apply the inverse operator, we obtain the first approximation as
in adding Equations (24) and (28), we obtain first-order approximate solutions as
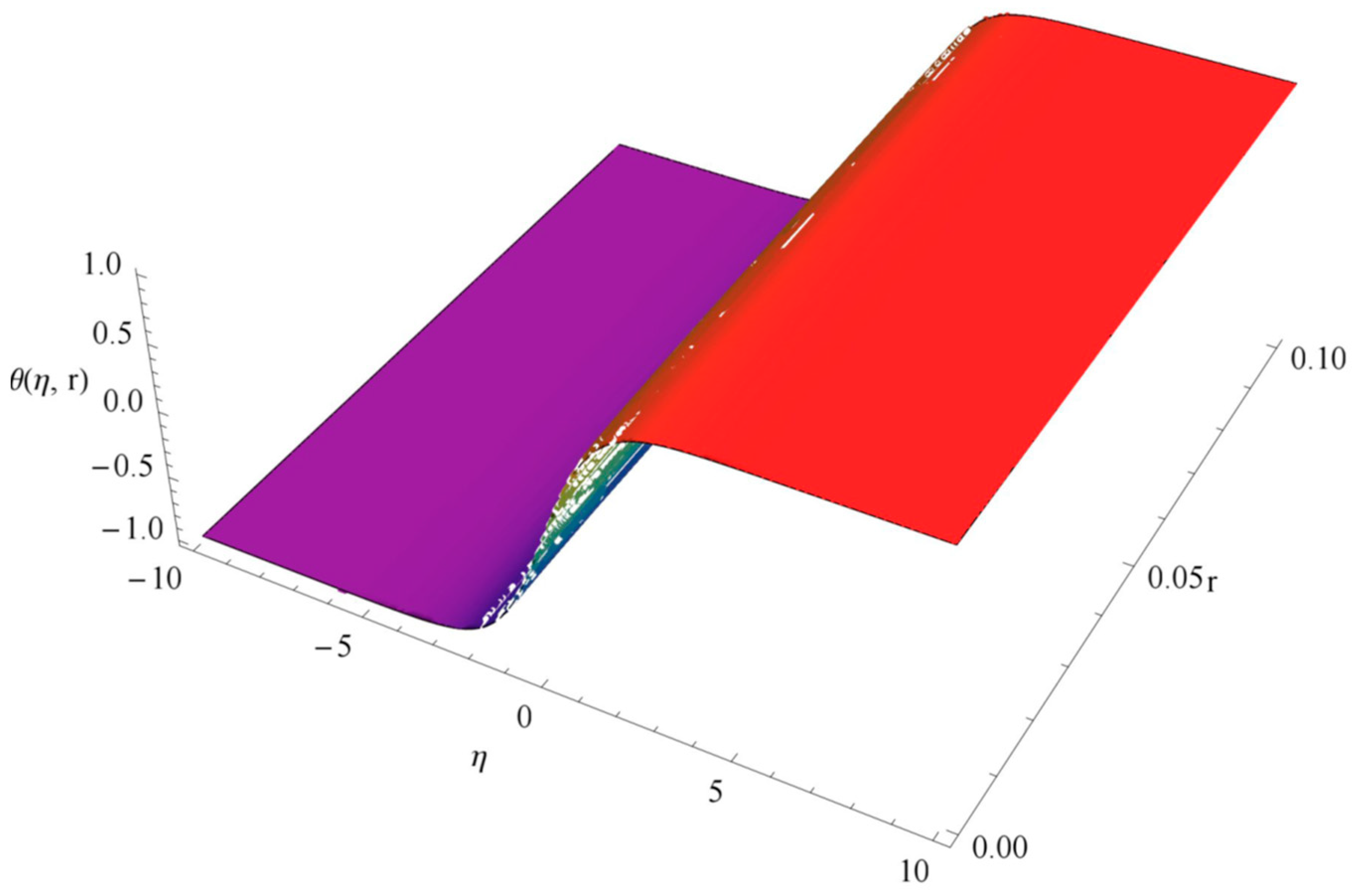
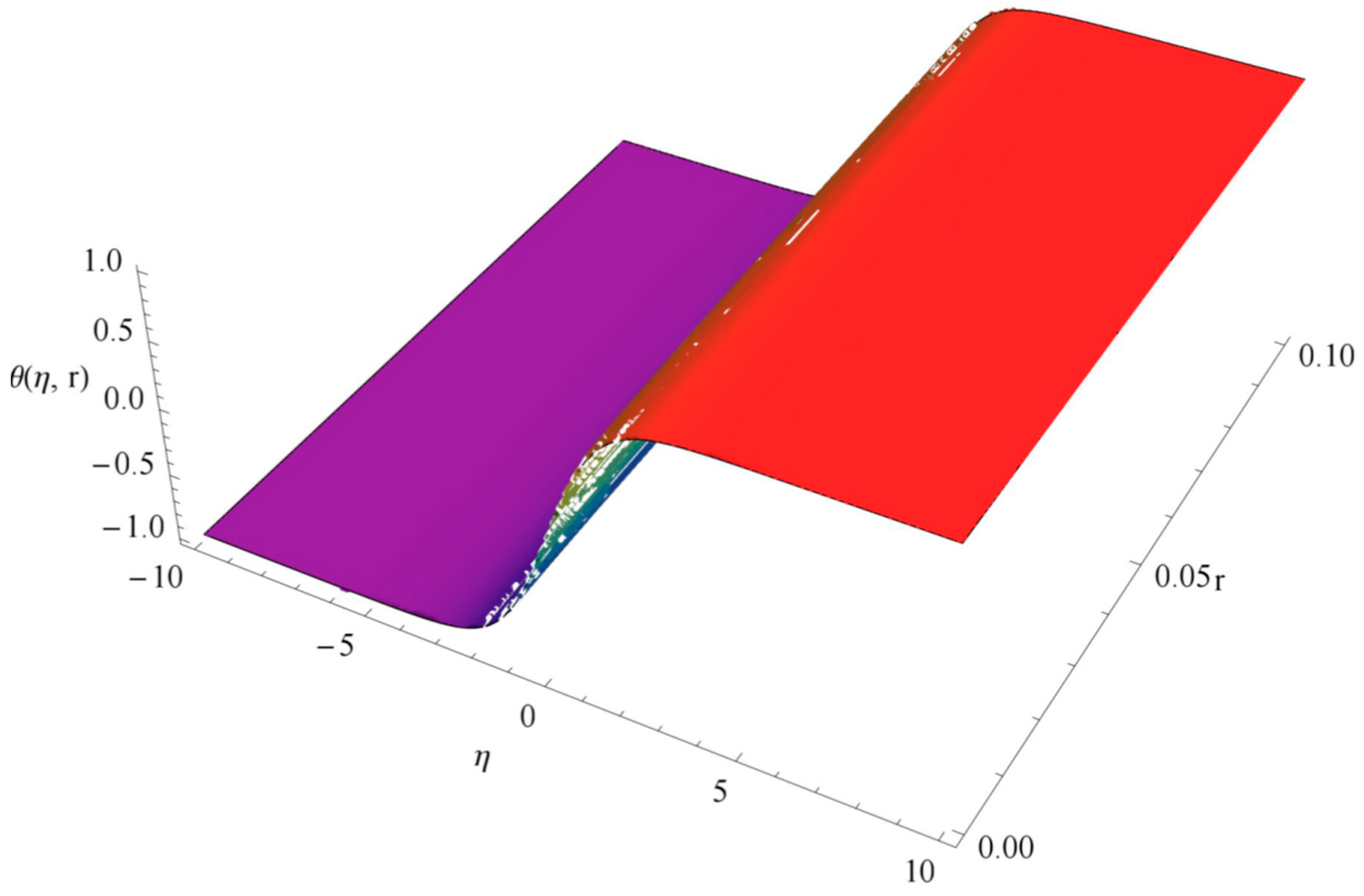
Problem 2. Consider the fractional Burgers–Poisson Equation [40]: Then, it is subject to the initial condition:
The exact solution of Equation (30) at
is
According to the non-linear operator, we choose
and
for problem 2.
Using the same procedure of the OAFM method, we obtain the zero-order and first-order solution as
In combining Equations (34) and (35), we obtain the OAFM solution given by the following expression:
Problem 3. The BBM–Burger equation can be written as [41]with the initial conditions of The exact solution of Equation (37) at
α = 1 is:
According to the non-linear operator, we choose
and
for problem number 3:
Using the same procedure of the OAFM method, we obtain the zero-order and first-order solution as
We obtain the first-order approximate solution by combining Equations (41) and (42).
5. Discussion
This section discusses the results of the optimal auxiliary function method (OAFM) for solving fractional-order equations. In this study, Mathematica 9 was employed for all of our computational work. The accuracy and the validity of the method were evaluated by comparing the results obtained with other analytical methods available in the literature.
Table 1 show the numerical values of convergence control parameters obtained using the collocation technique.
Table 2 represents the absolute error of the OAFM, comparing it with NIM and q-HAM using the exact solution
.
Table 3 shows the numerical values of convergence control parameters obtained using the Galerkin method (for the fractional Burgers-Poisson equation, we used the Galerkin method because, for this problem, the collocation method did not provide us with a rapid result).
Similarly,
Table 4 compares OAFM results with exact and HPM solutions; the absolute error shows that our method is more accurate than the HPM. These tables demonstrate the accuracy of the OAFM by evaluating the absolute errors for different problems with their exact solutions.
Table 5 and
Table 6 present a comparative analysis of OAFM solutions with RPSM solutions and exact solutions for various
values, along with a comparison of absolute errors in RPSM at
, respectively. These comparisons further validate the effectiveness of the OAFM in delivering precise solutions.
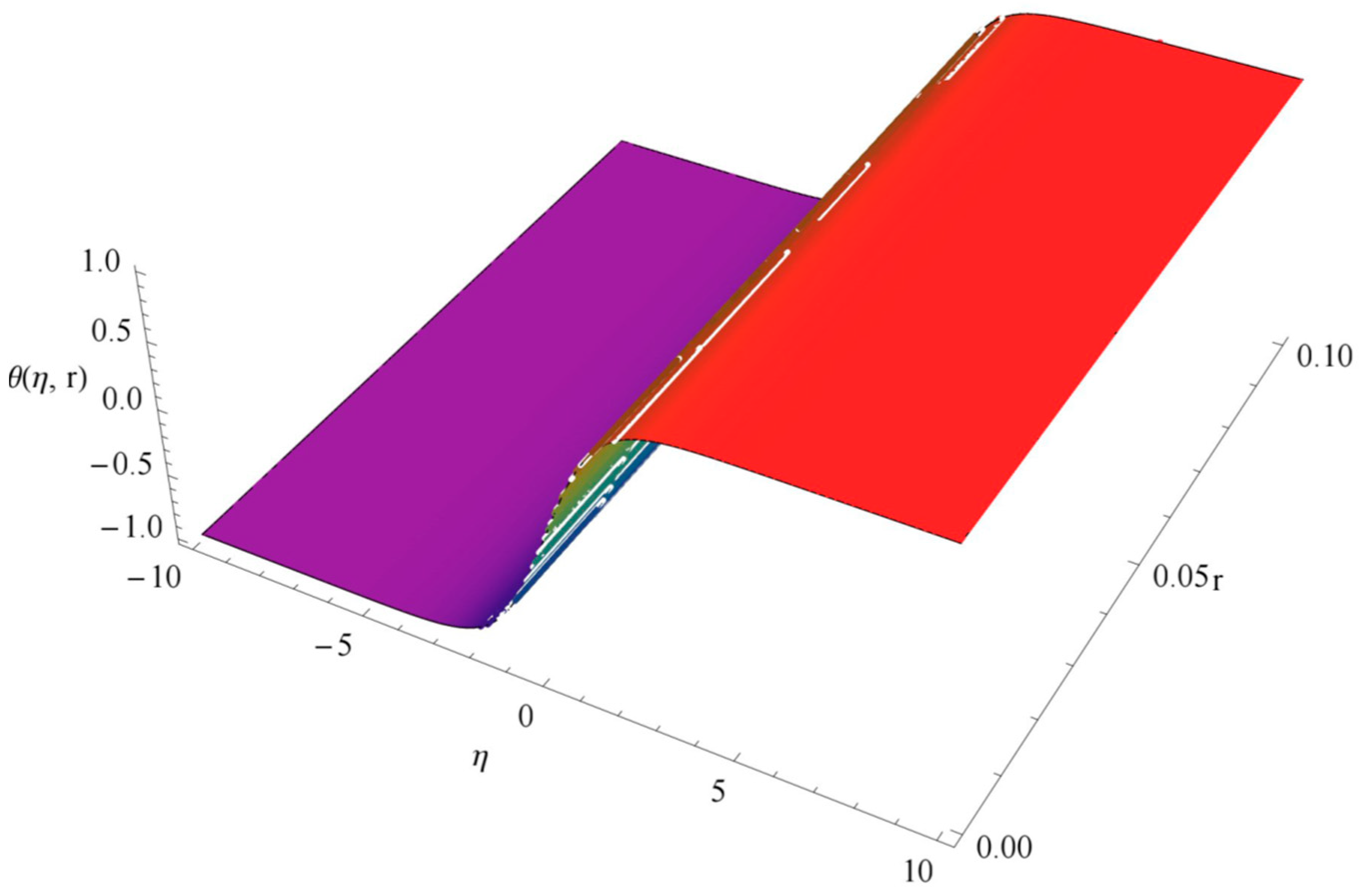
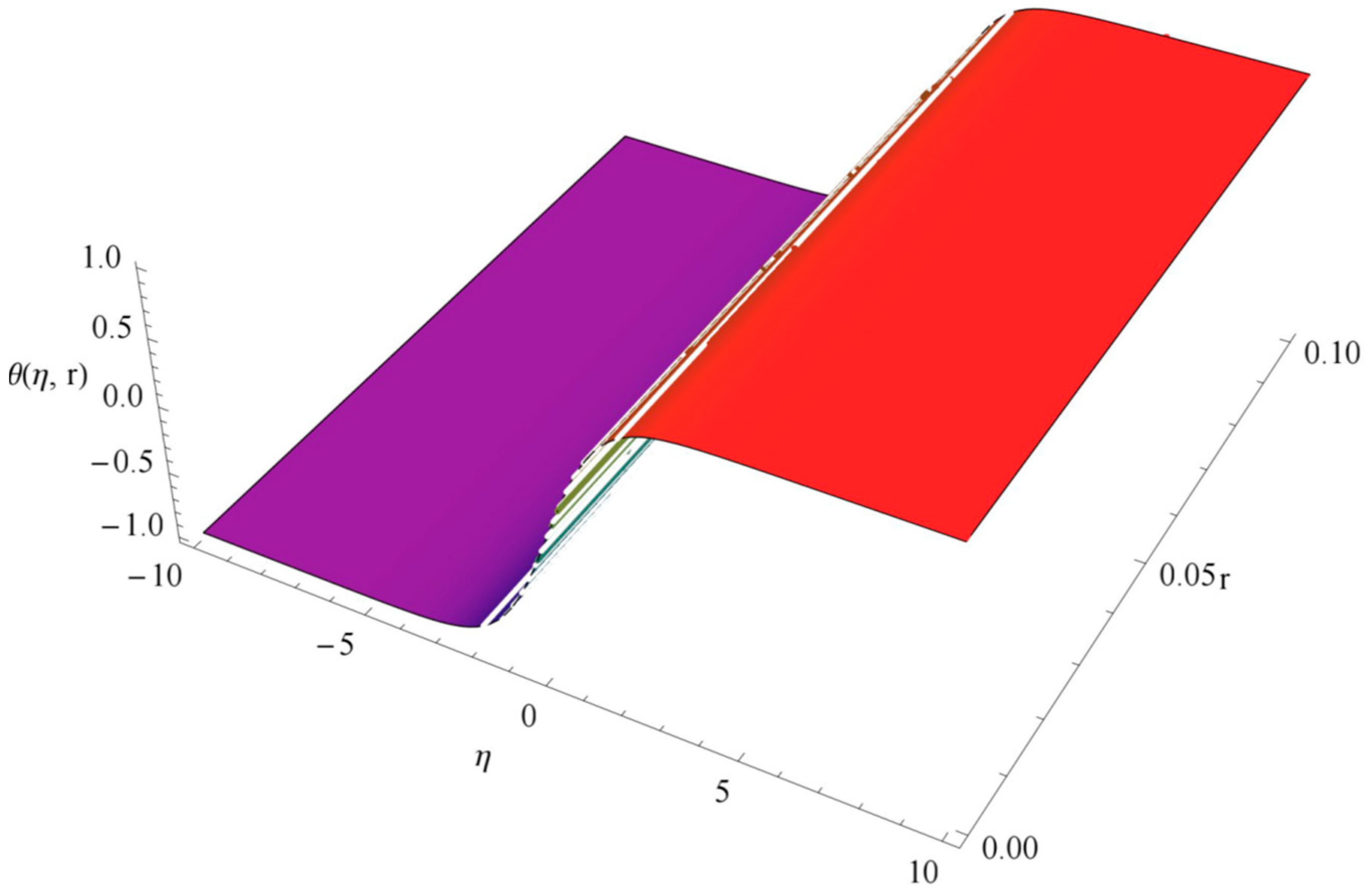
Visual representations are provided through 2D and 3D graphs to complement the numerical results.
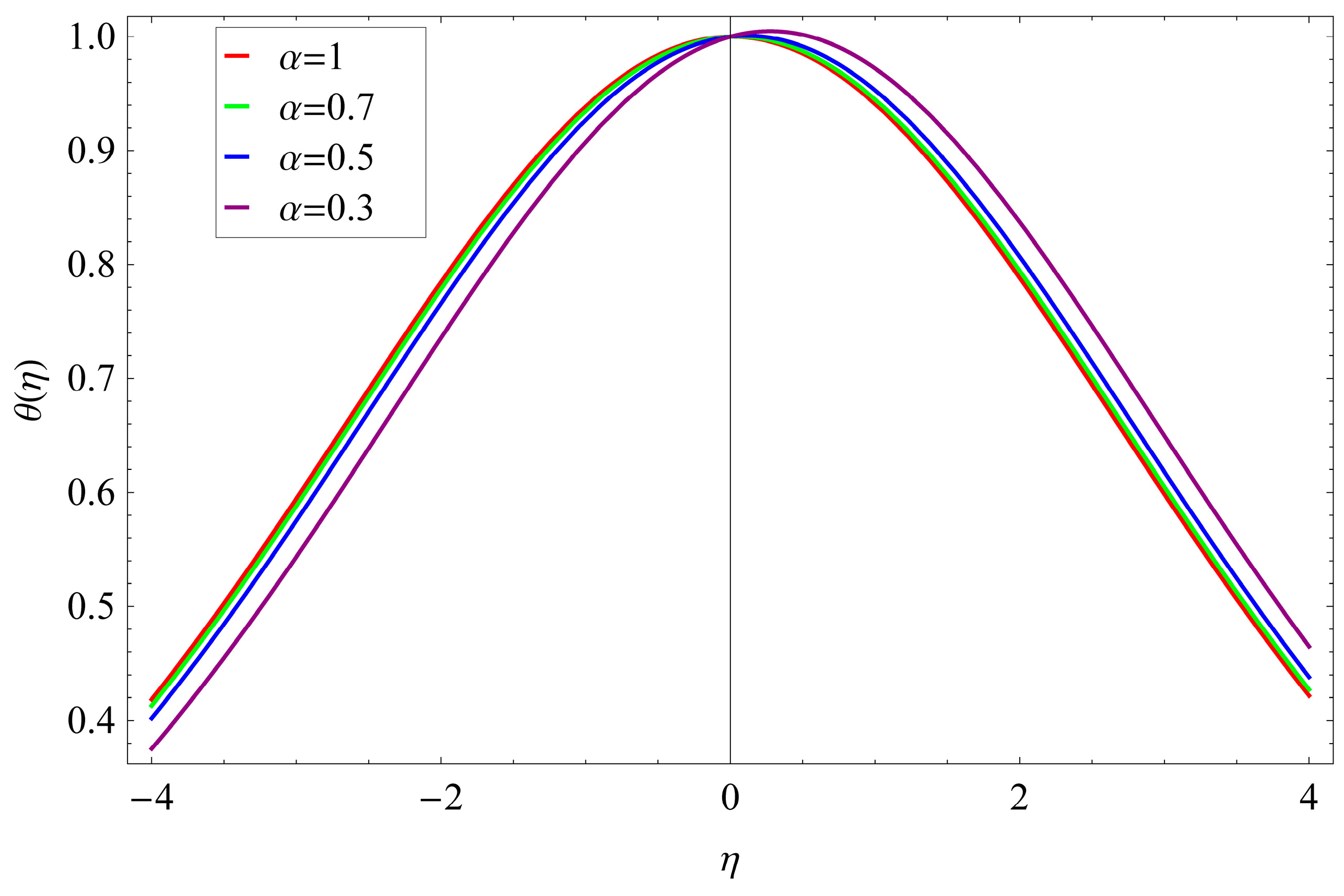
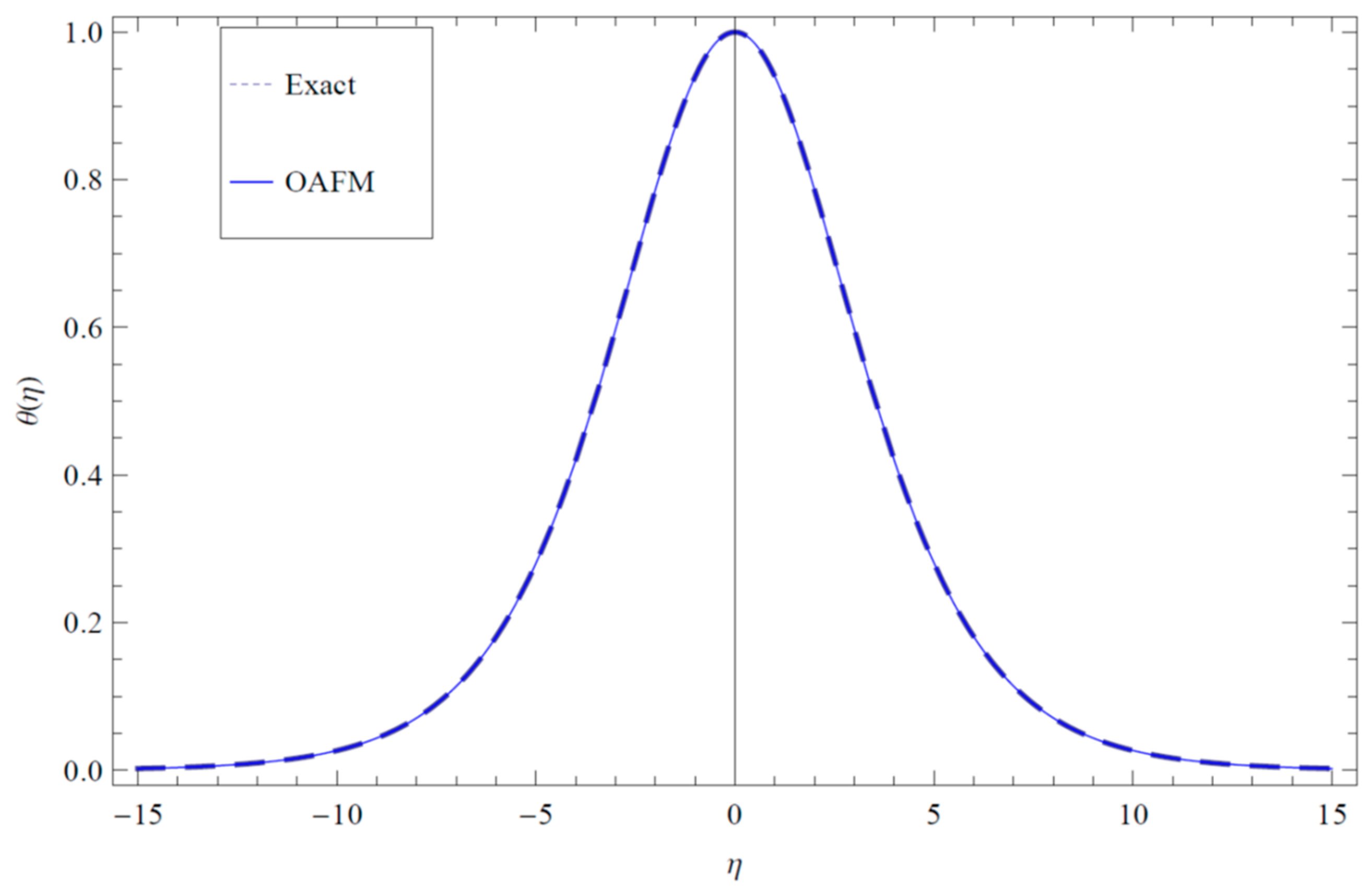
Figure 1 and
Figure 2 display 2D graphs for problem 1 with varying values of
, while
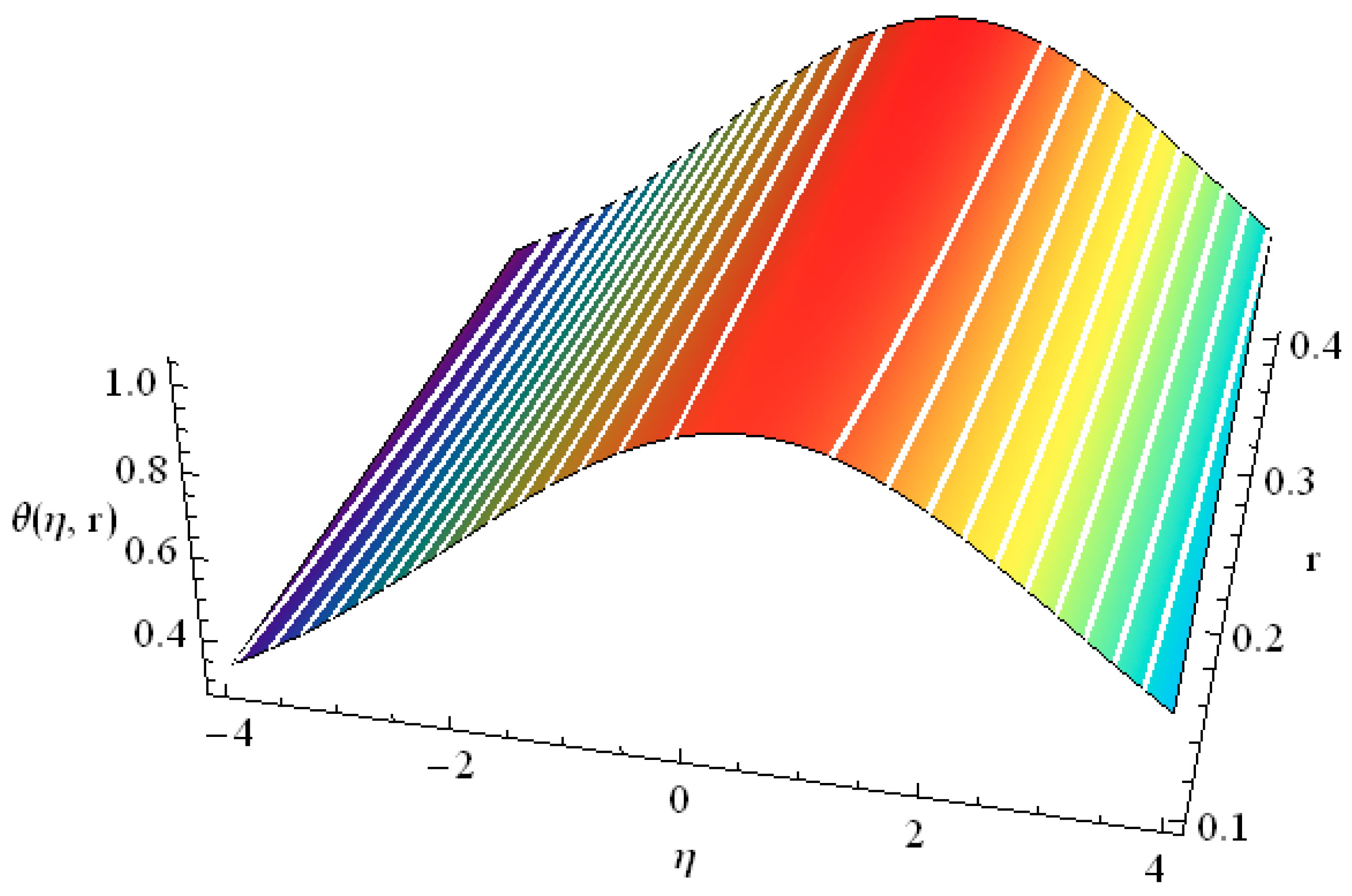
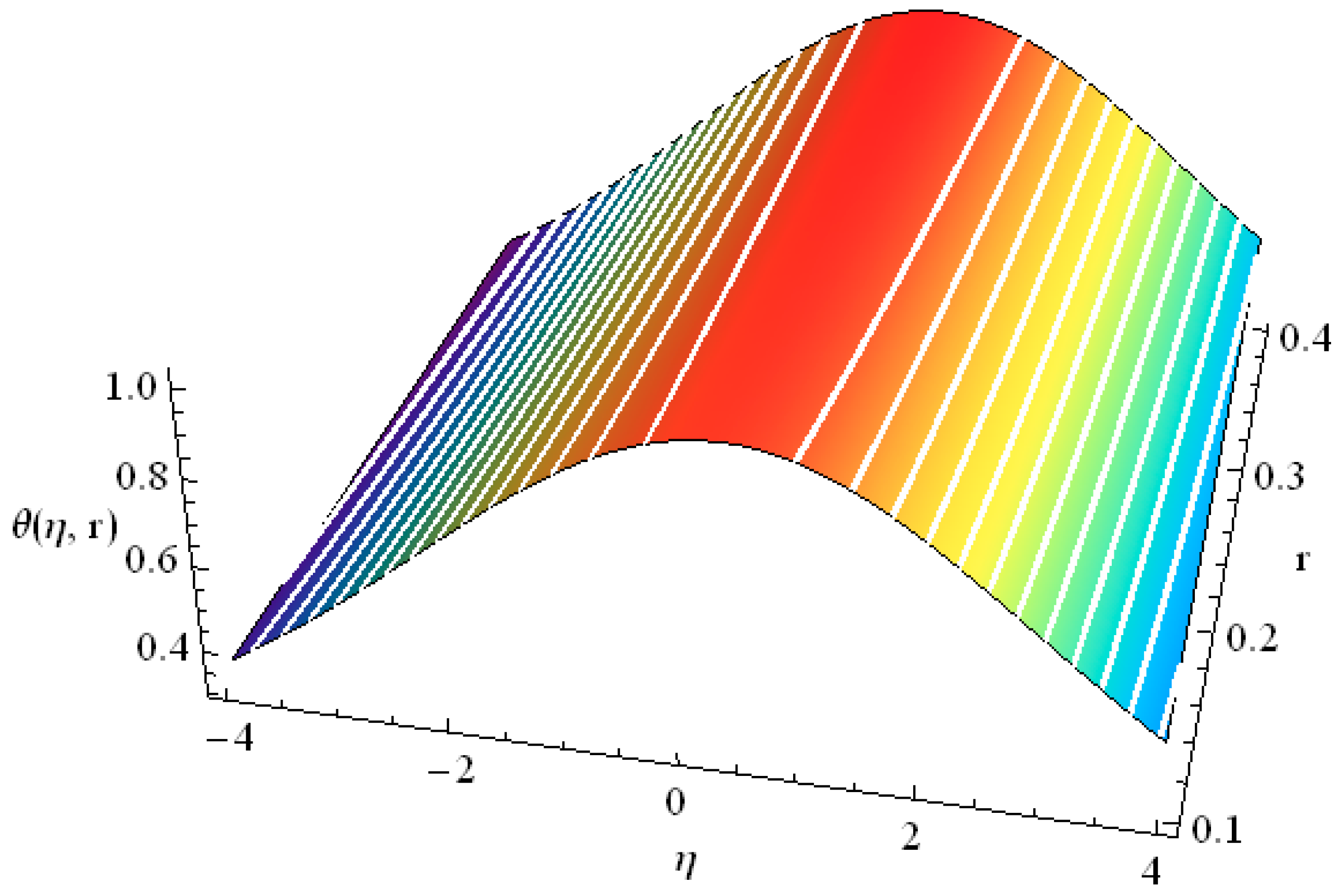
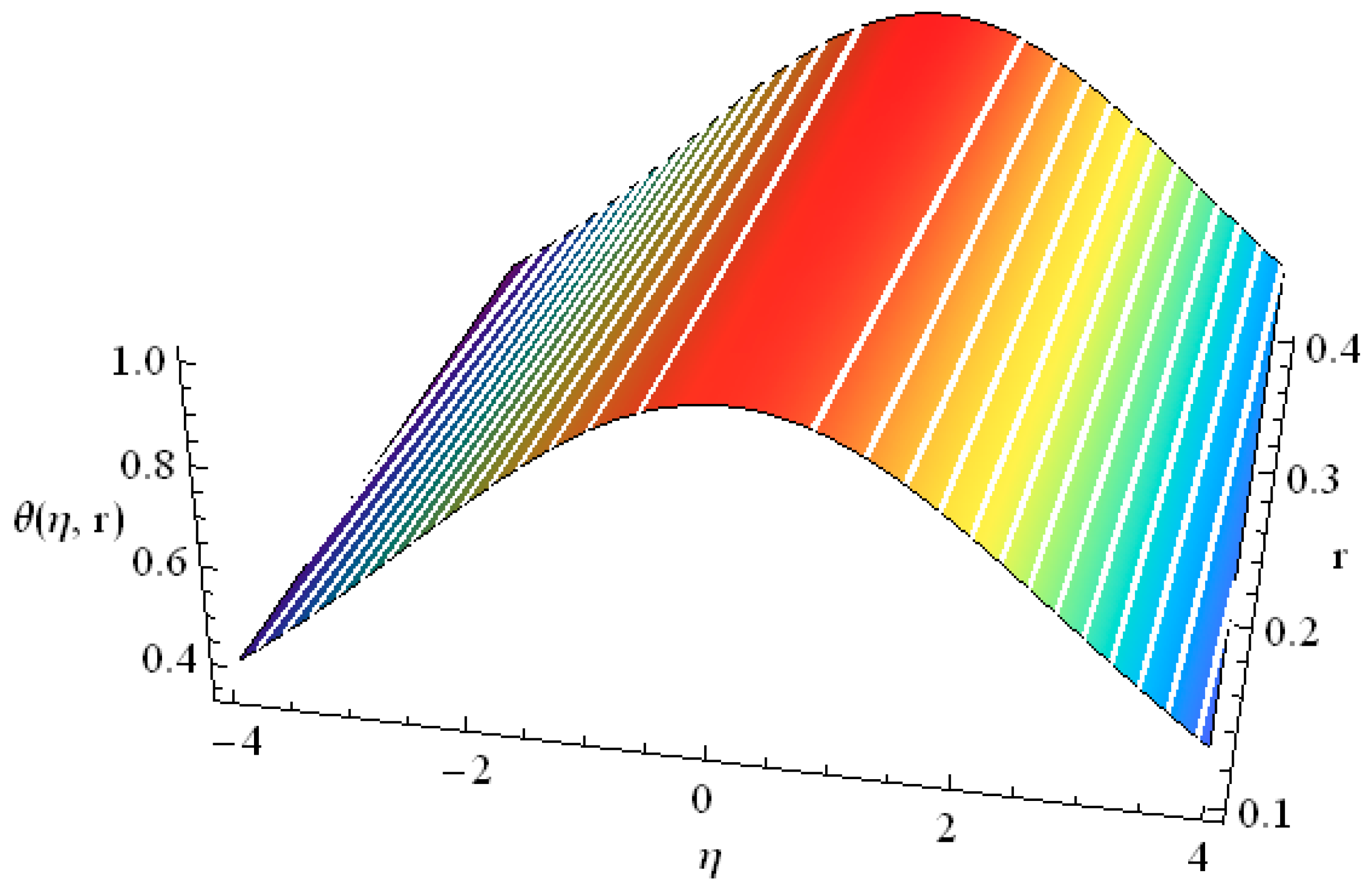
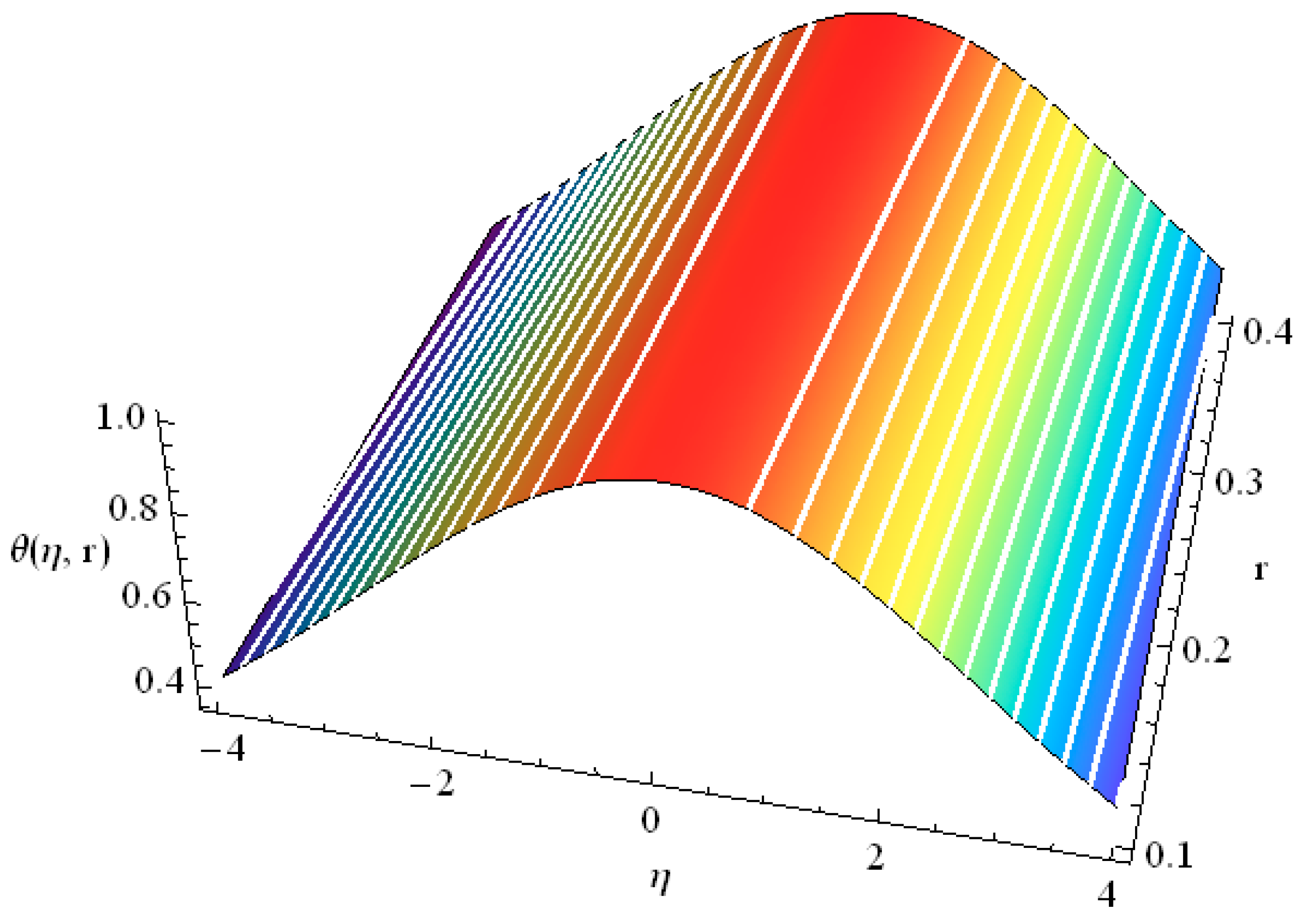
Figure 3,
Figure 4,
Figure 5 and
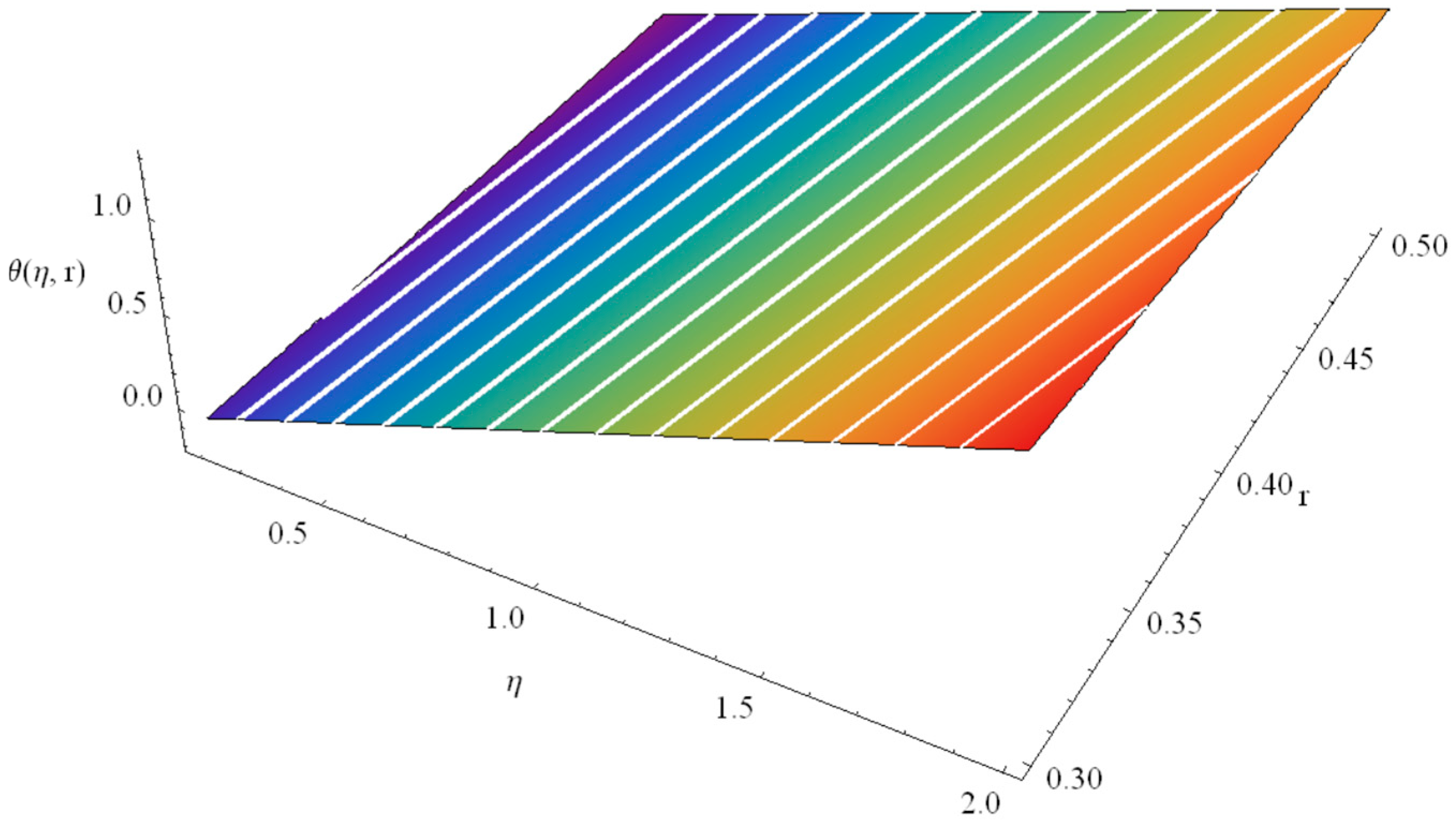
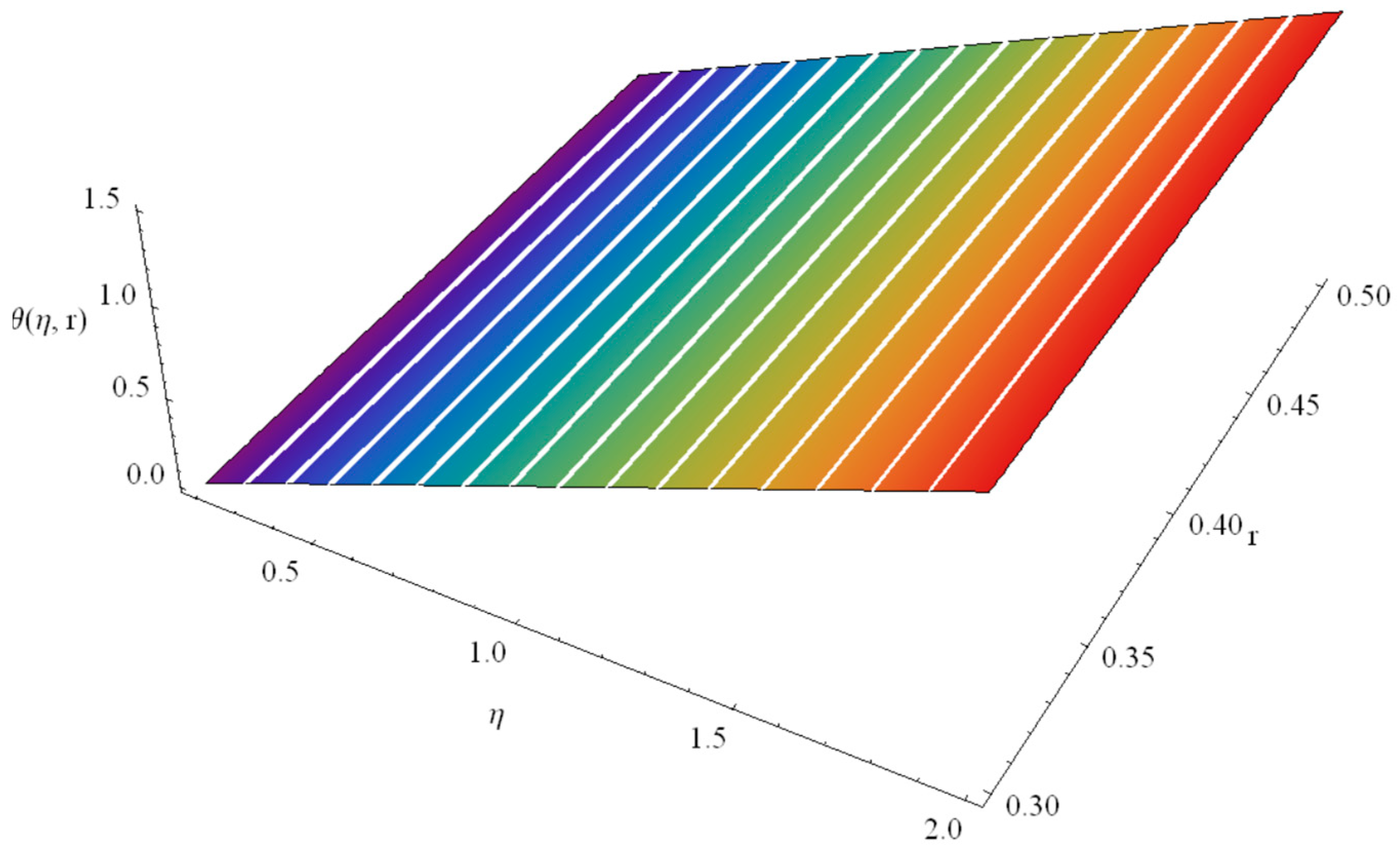
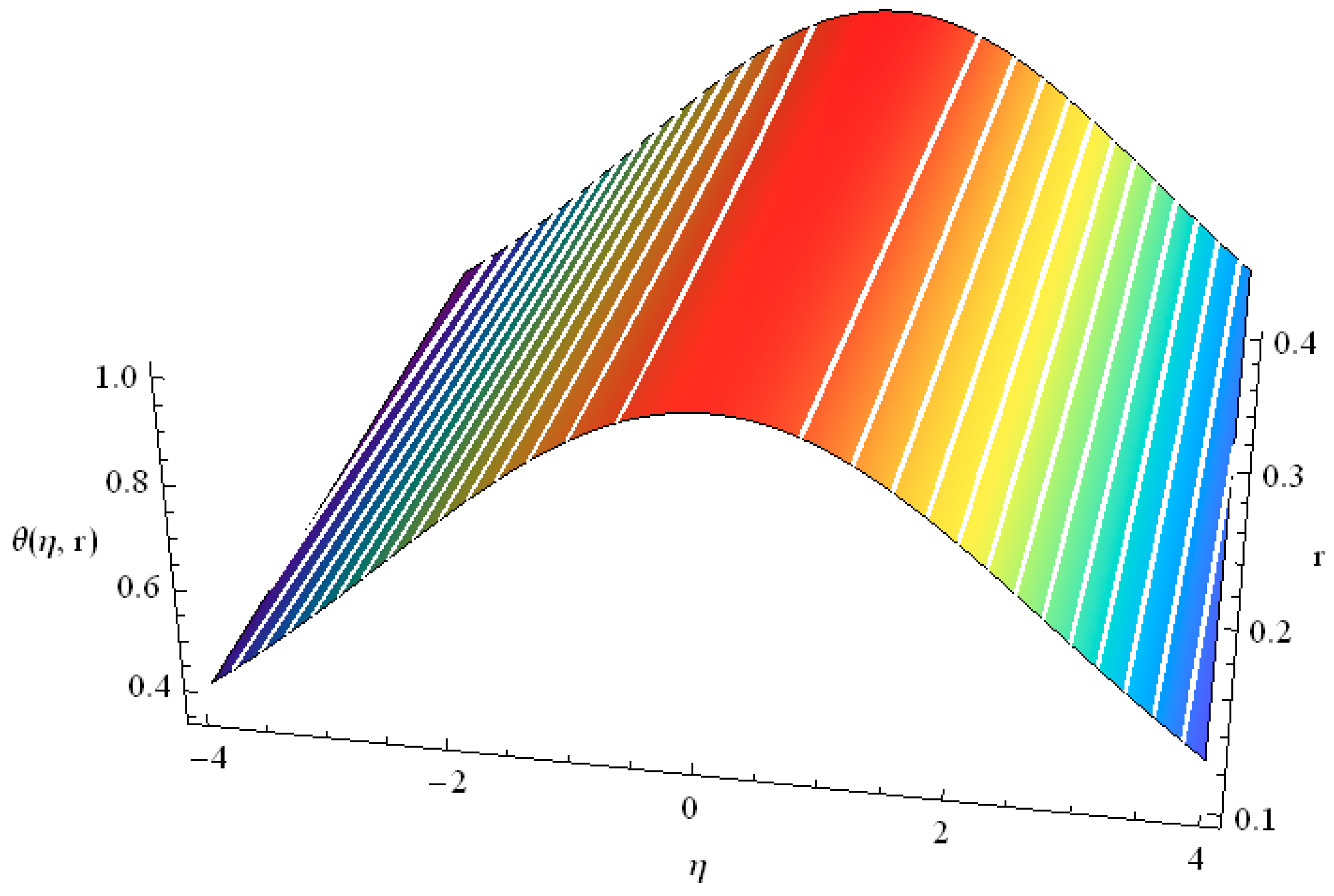
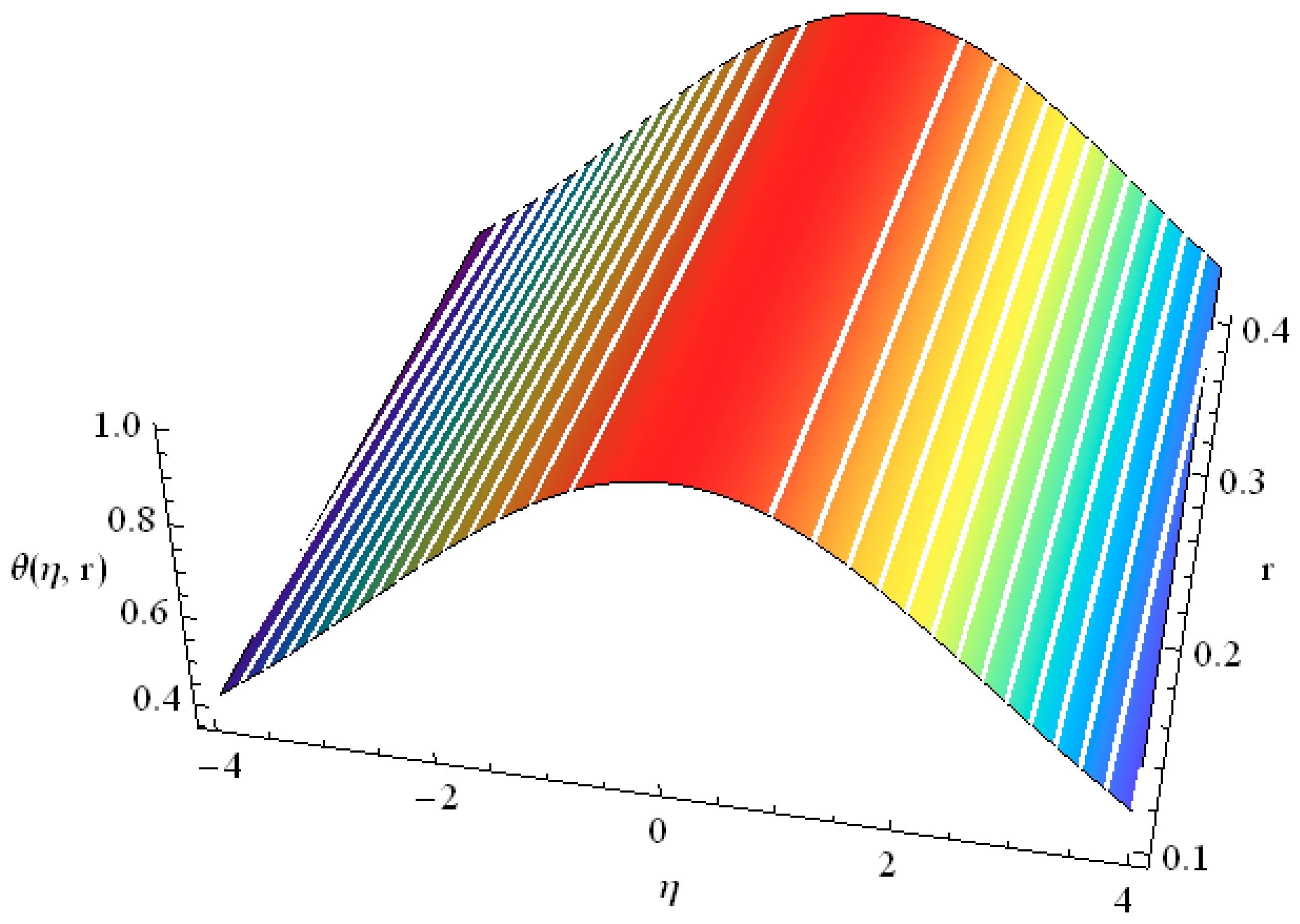
Figure 6 show 3D graphs for problem 1. Additionally,
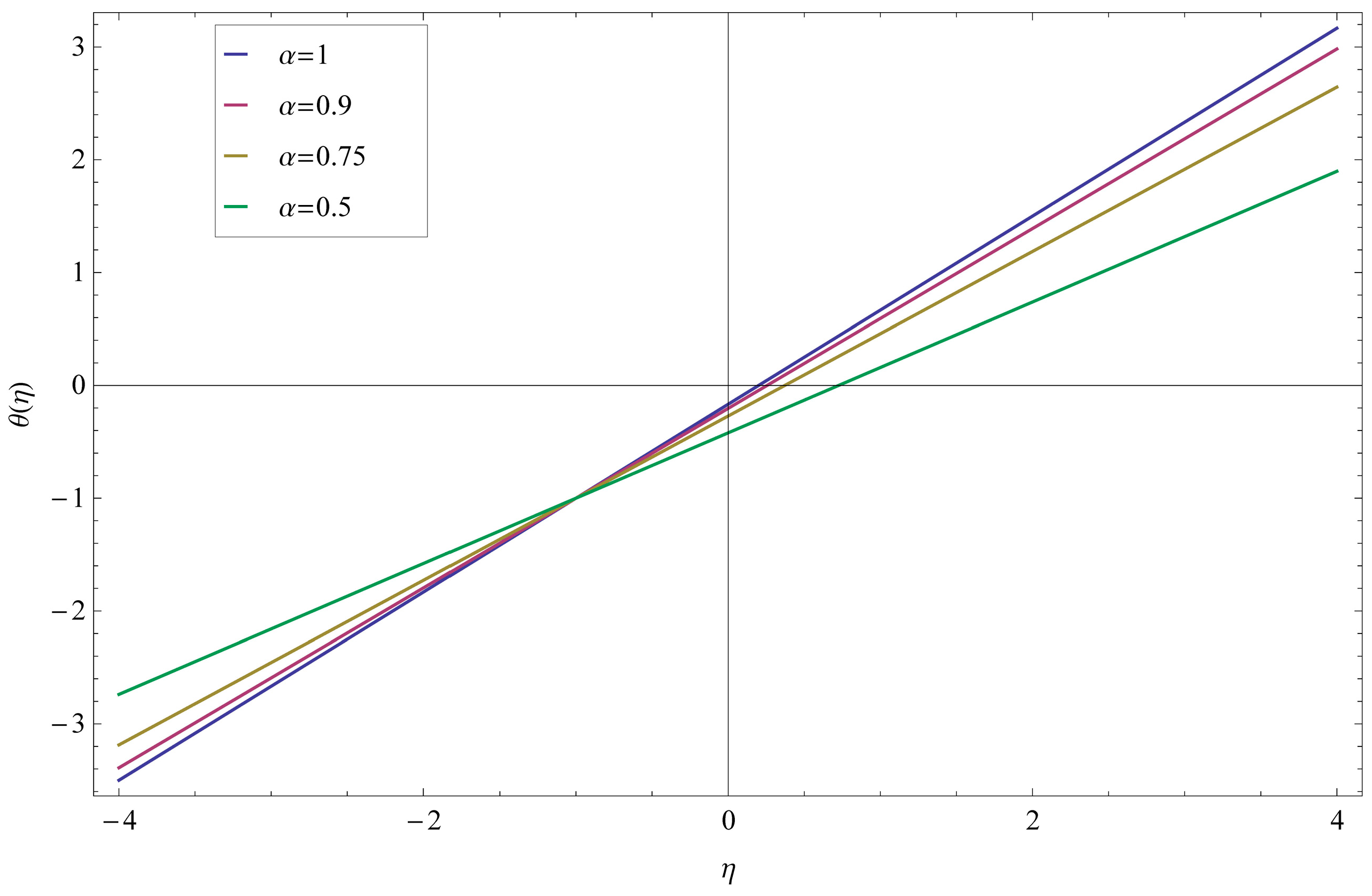
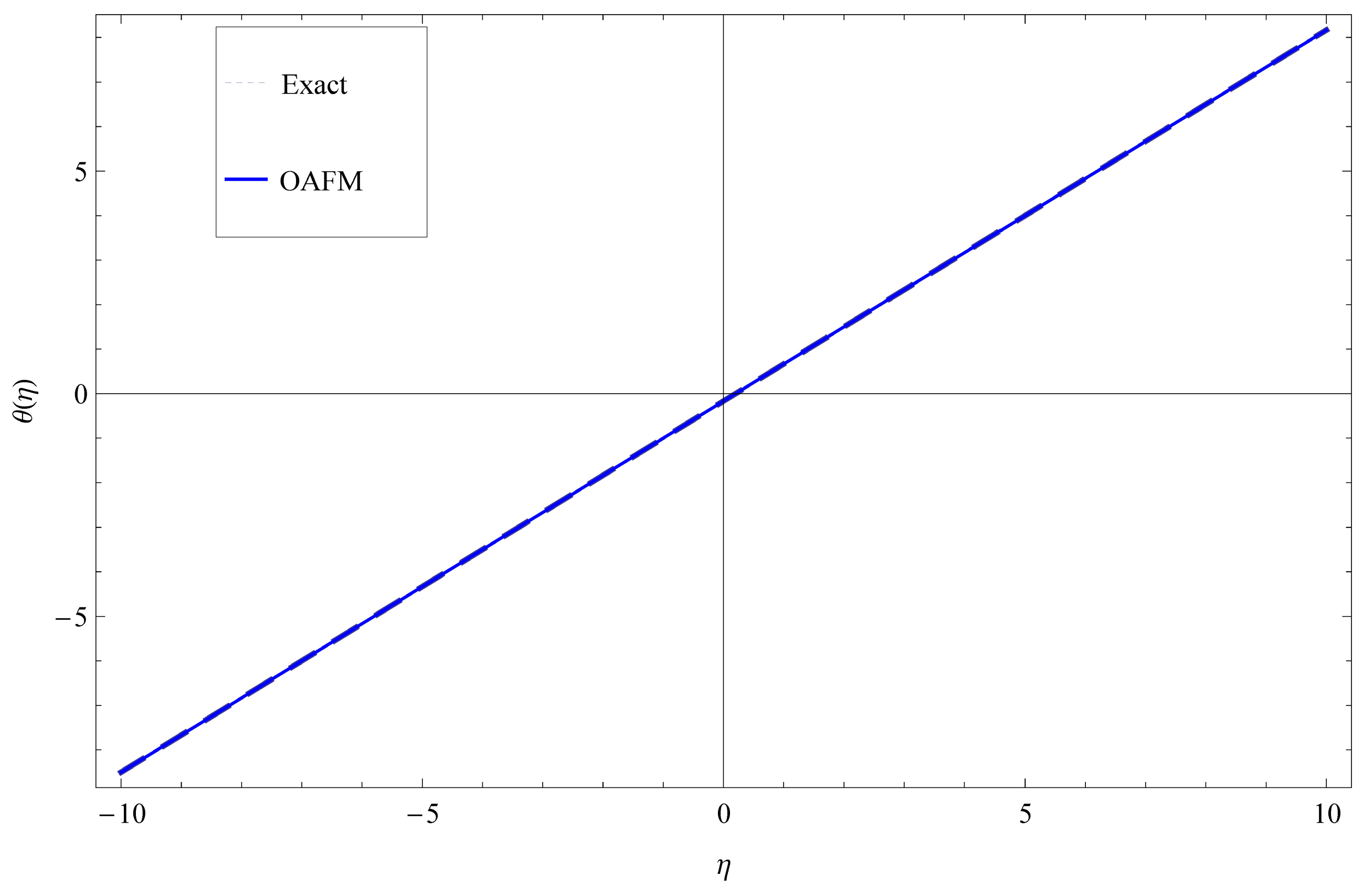
Figure 7 and
Figure 8 show 2D graphs for different values of
at
for problem 2, and
Figure 9 and
Figure 10 display 3D plots comparing the exact and OAFM solutions for problem 2. Furthermore,
Figure 11,
Figure 12,
Figure 13,
Figure 14,
Figure 15 and
Figure 16 show 3D graphs for problem 3 with different values of
, while
Figure 17 and
Figure 18 show 2D plots for varying
at
for problem 3.
Overall, the results presented in
Table 2,
Table 4,
Table 5 and
Table 6 indicate that, as the value of
approaches 1, the OAFM solution rapidly converges to the exact solution. Based on the presented results, we can confidently say that the OAFM approach delivers remarkably precise solutions.
6. Conclusions
The optimal auxiliary function method (OAFM) is a strong and reliable analytical tool, providing solutions that closely match the exact solutions for various fractional-order equations. The time-fractional Cahn–Hilliard equation, fractional Burgers–Poisson equation, and Benjamin–Bona–Mahony–Burger equations have all been successfully used for finding the approximate solutions by using the OAFM. We can conclude from the numerical results and the presented figures that the proposed method for fractional-order non-linear partial differential equations is very reliable and easy to use. In comparison to NIM, FHATM, q-HAM, RPSM, and HPM, the OAFM approach solutions converge quickly to the exact solution. Based on the mathematical findings, we determined that the proposed method is simple, quick, and effective.


 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}