
Robot Manipulator Control Using a Robust Data-Driven Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1-
- Control constraints: Koopman control may not easily accommodate control constraints, such as safety limits on system states or control inputs. Ensuring that the control strategy remains within these constraints can be challenging.
- 2-
- Computational complexity: solving the Koopman control problem can be computationally intensive, particularly for high-dimensional systems. Real-time control implementation may be limited by computational constraints.
- 1-
- The application of Koopman theory to linearize the nonlinear dynamics of the 2-DoF robot manipulator.
- 2-
- The use of the DMD method to obtain the Koopman operator.
- 3-
- The proposal of a fractional sliding mode control to regulate the linearized dynamics model based on Koopman’s theory.
- 4-
- Implementation of conventional PID and FOSMC controllers to assess the performance of the proposed control method.
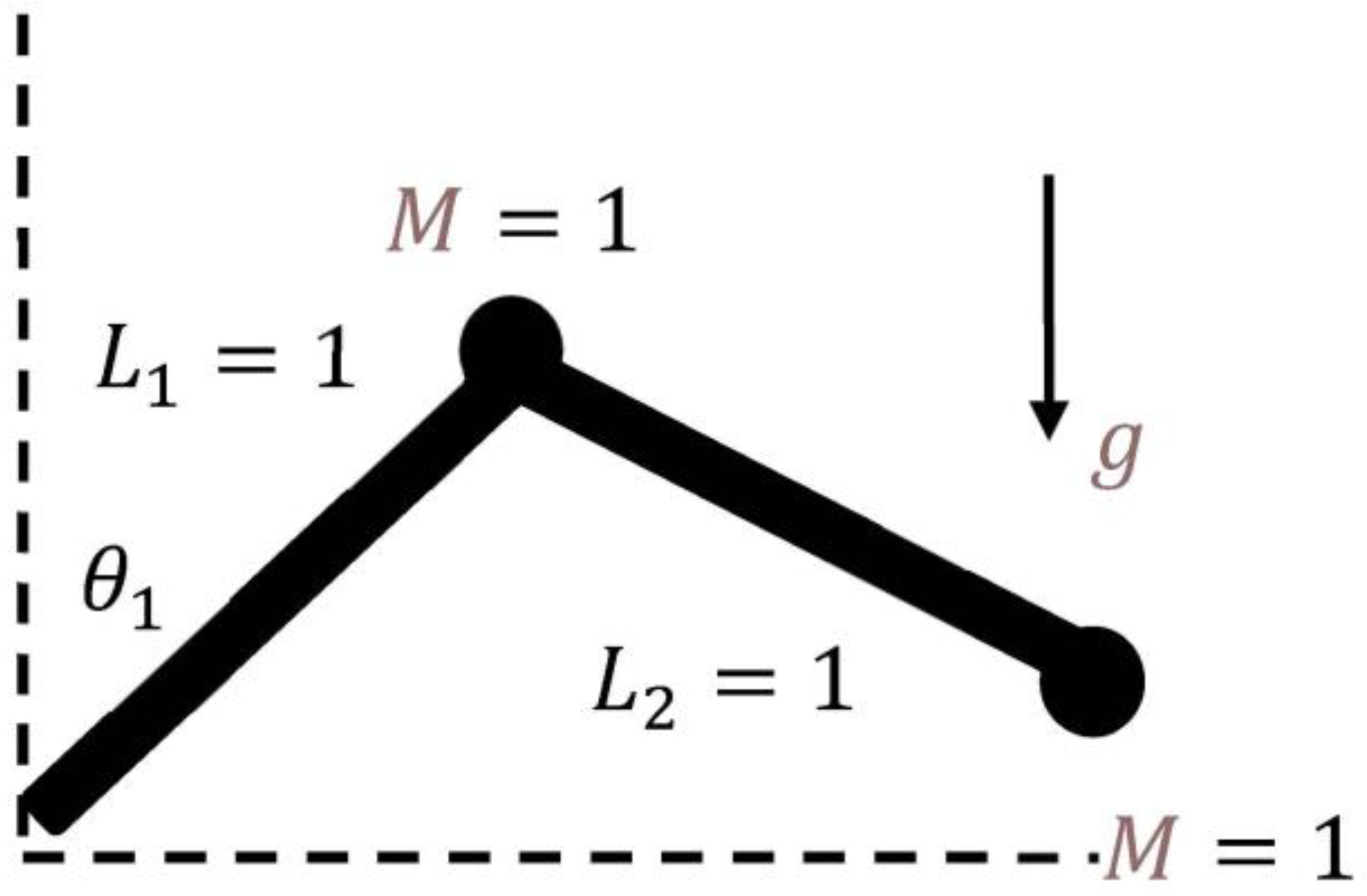
2. Dynamic Model of 2-DoF Robot Manipulator
3. PID Control Model
4. Fractional Order Sliding Mode Control
5. Koopman Theory
- Local linearity: the Koopman theory linearization is typically valid only in the vicinity of equilibrium points or limit cycles of the nonlinear system. Therefore, it is acceptable to use the linearized model when you are interested in studying the system’s behavior near these points.
- Small perturbations: the linearized model is a good approximation when the system experiences small perturbations around a stable equilibrium. In such cases, the linearized model can provide insights into the stability and local behavior of the system.
- Short-time predictions: if you are interested in short-term predictions or analyzing the system’s behavior over a relatively small time interval, the linearized model can be acceptable. It often provides accurate predictions for short time horizons.
- Reduced-order modeling: Koopman theory can be used to reduce the dimensionality of a high-dimensional nonlinear system, creating a lower-dimensional linearized model that retains important dynamics. This can be valuable for simplifying complex systems while preserving critical behaviors.
6. DMD Method
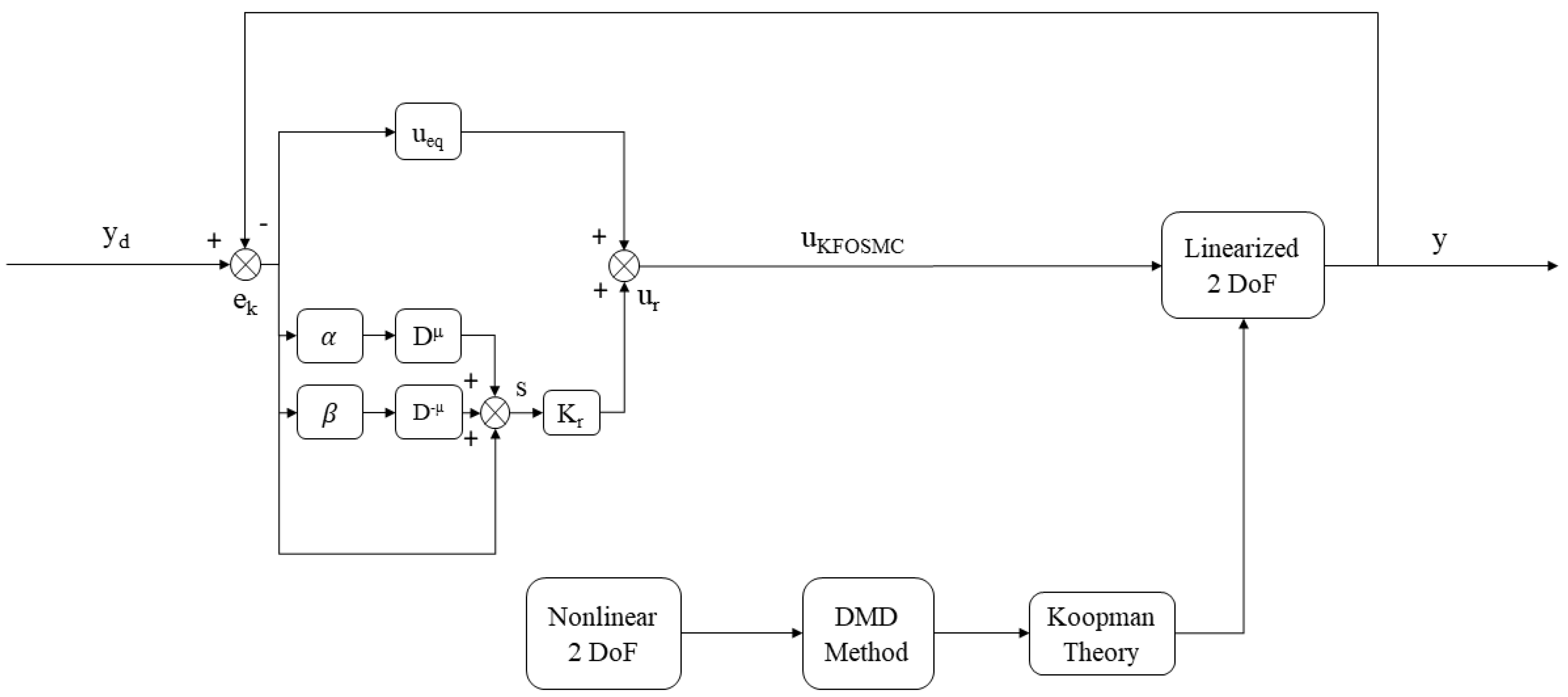
7. Koopman Fractional Sliding Mode Control
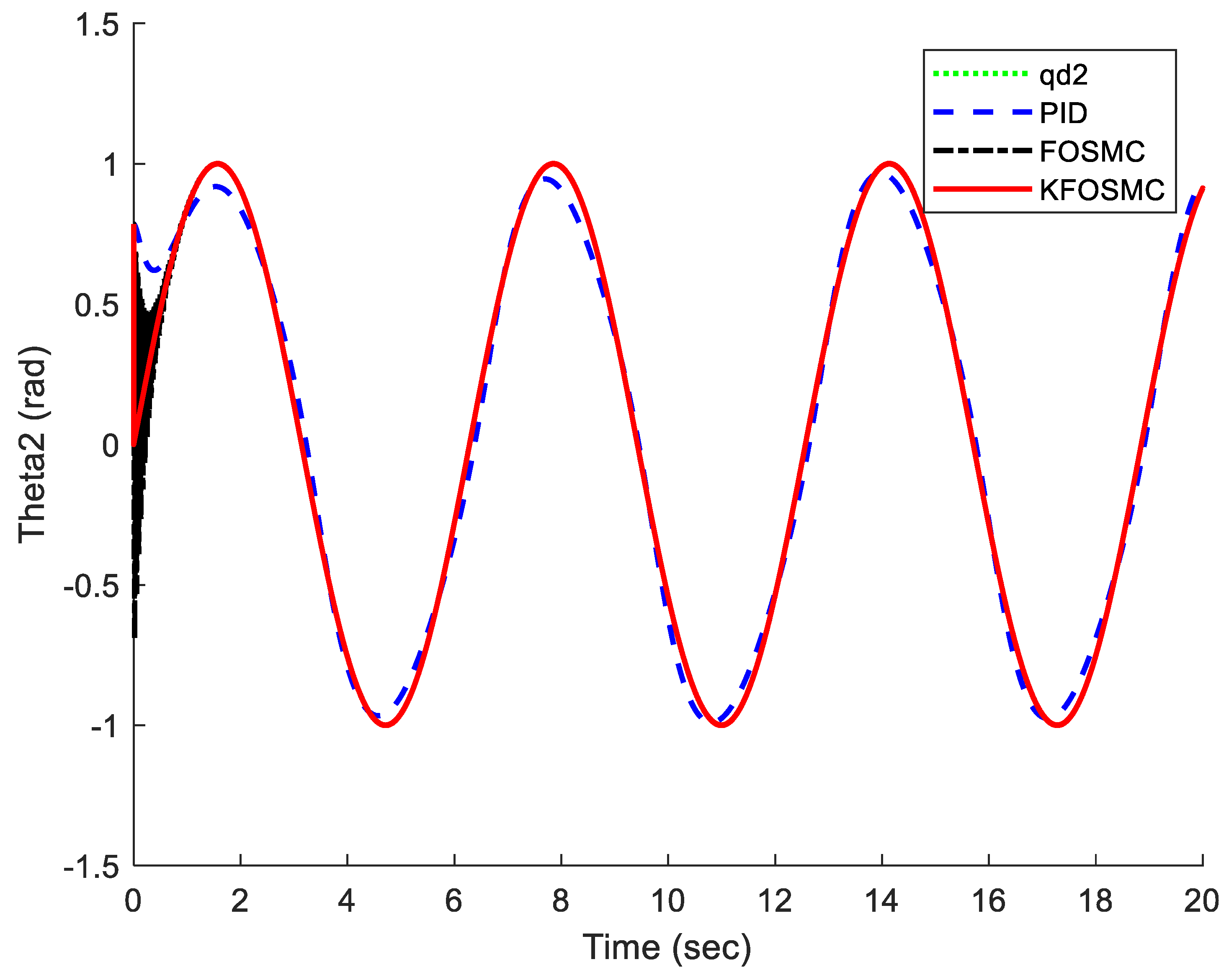
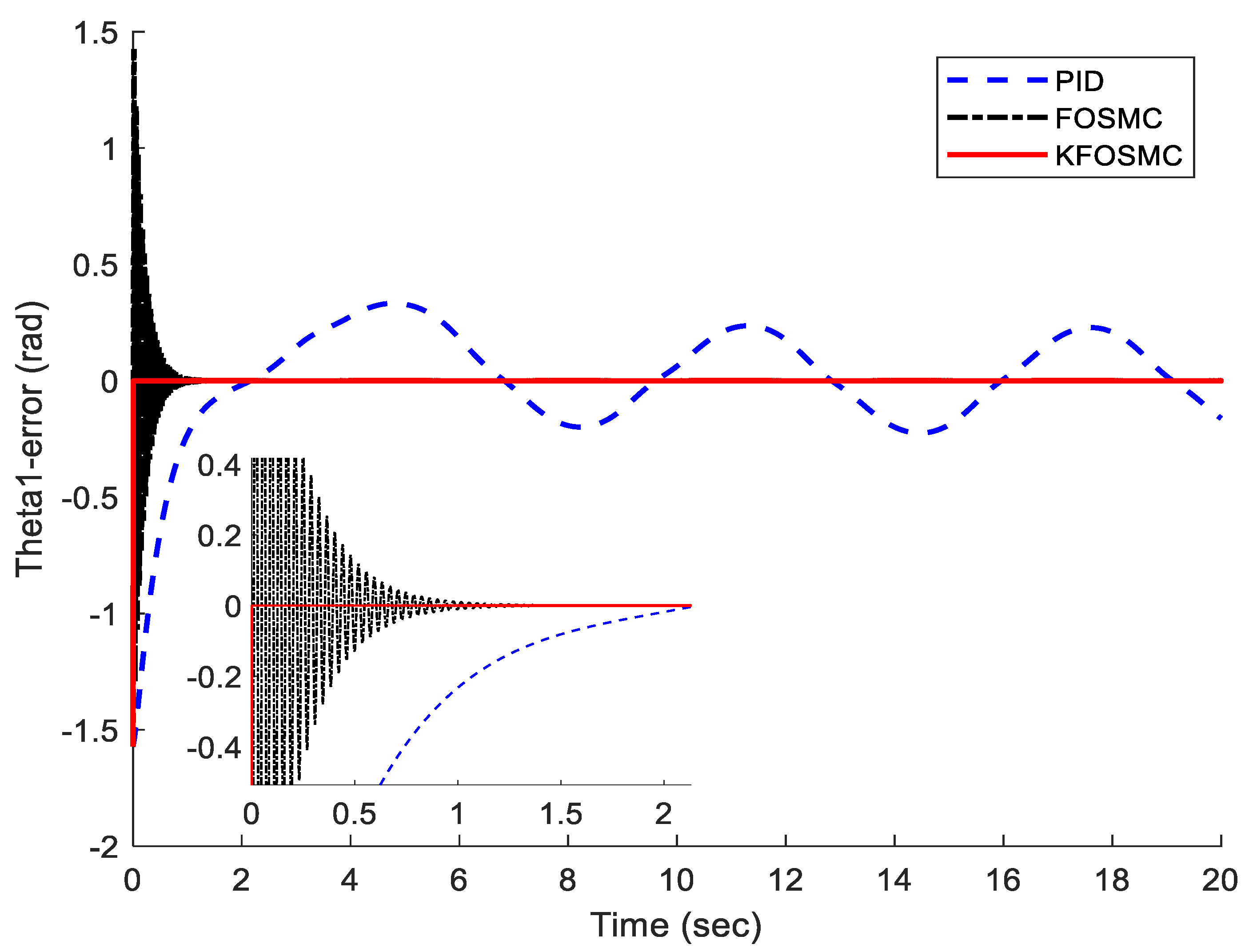
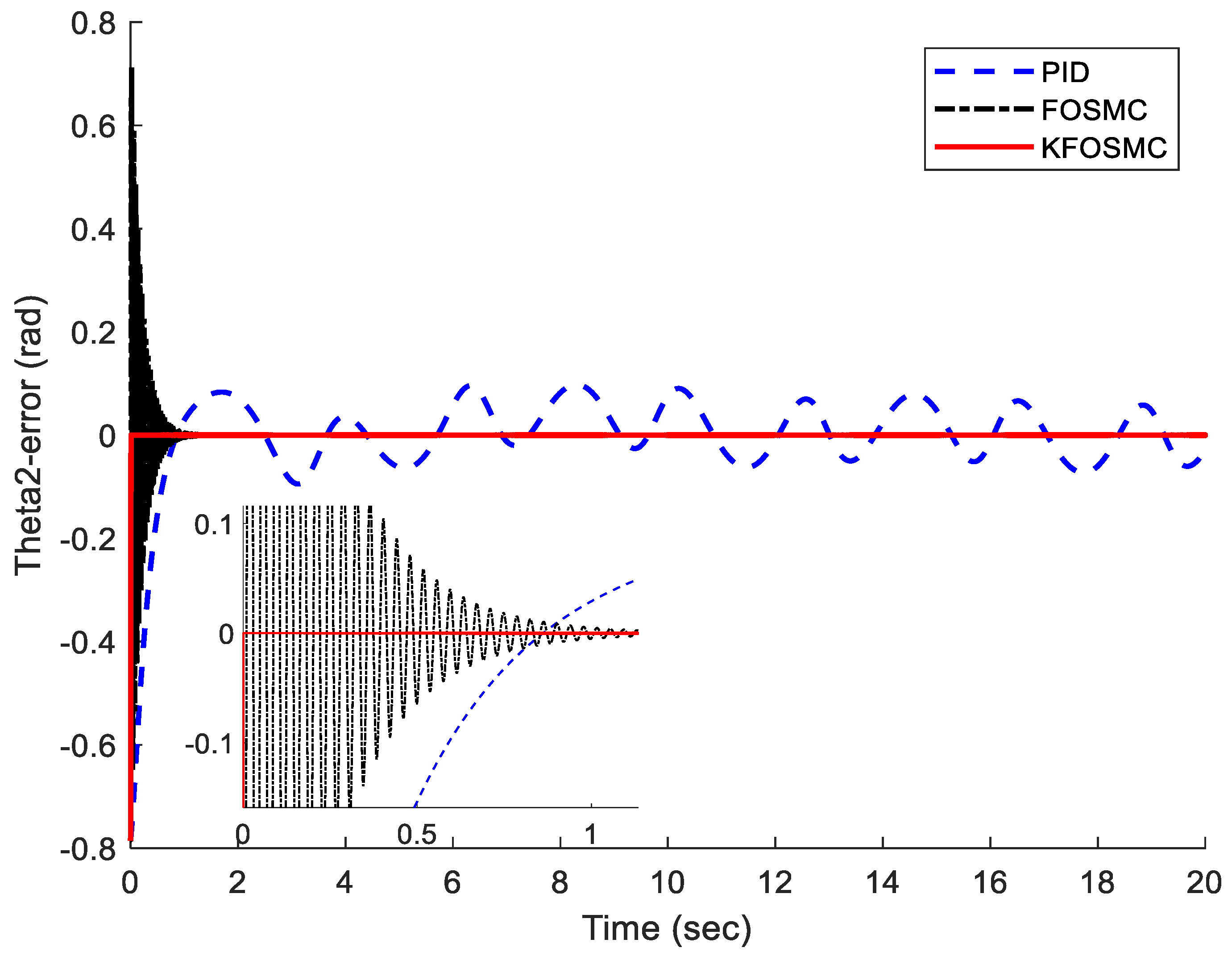
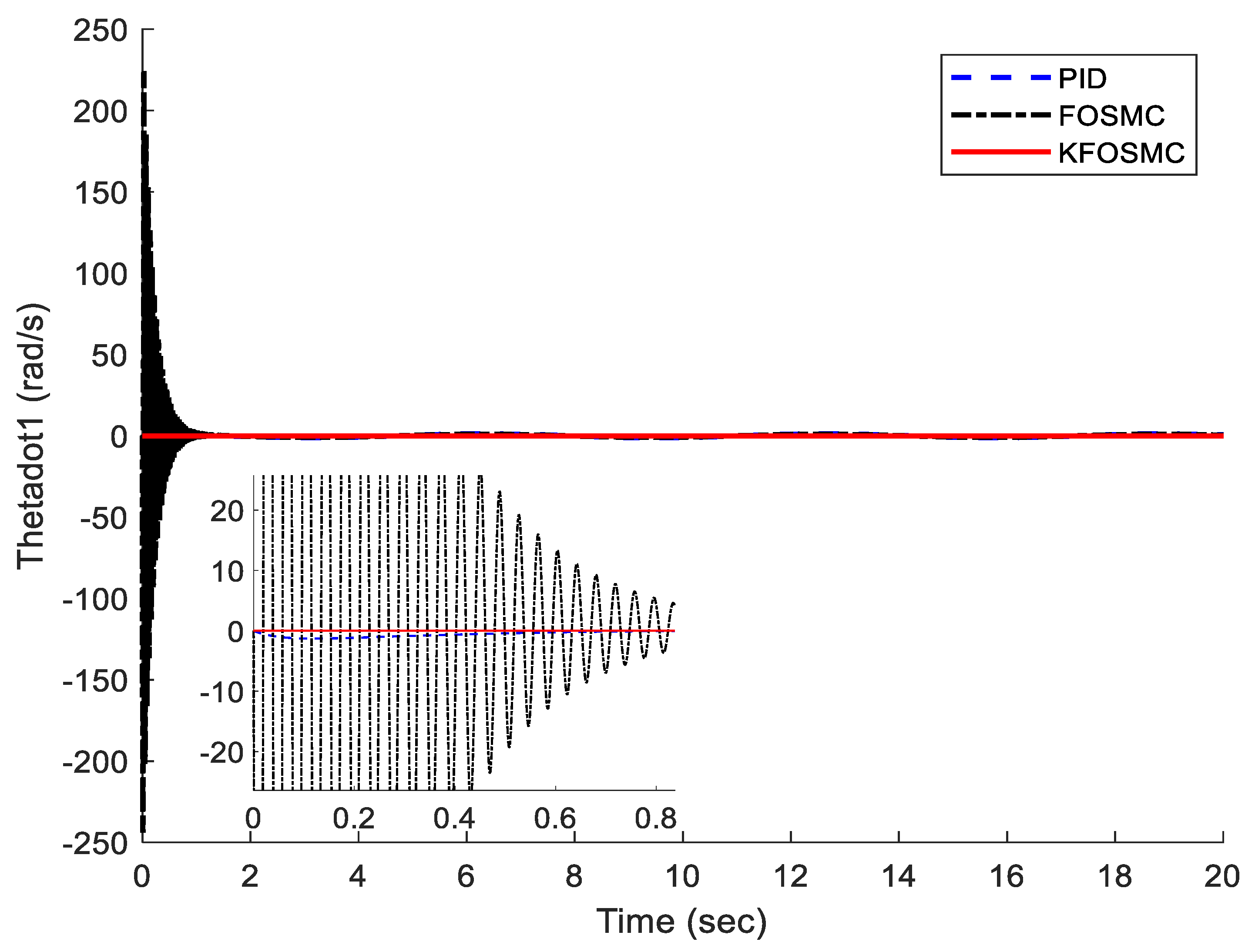
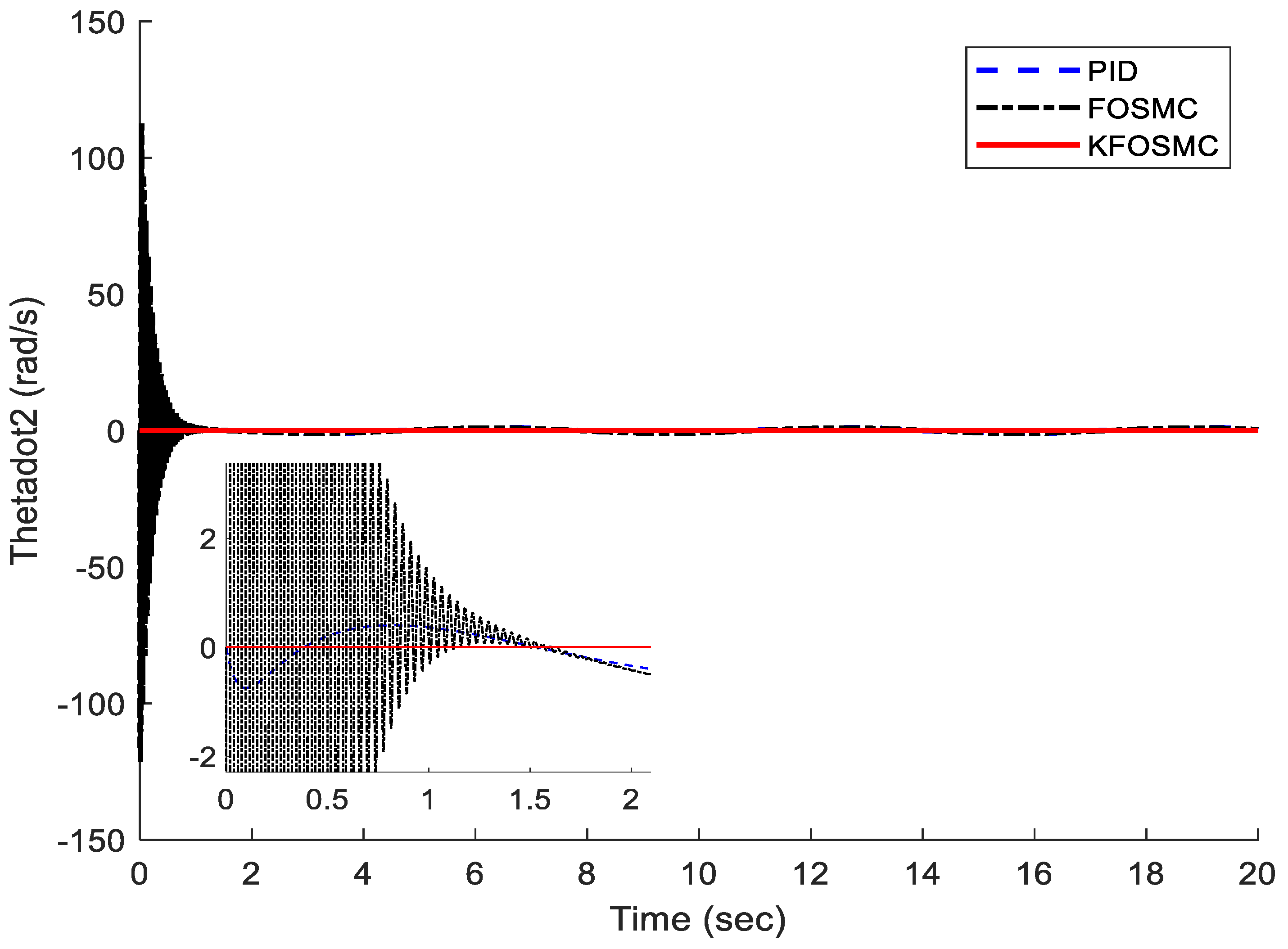
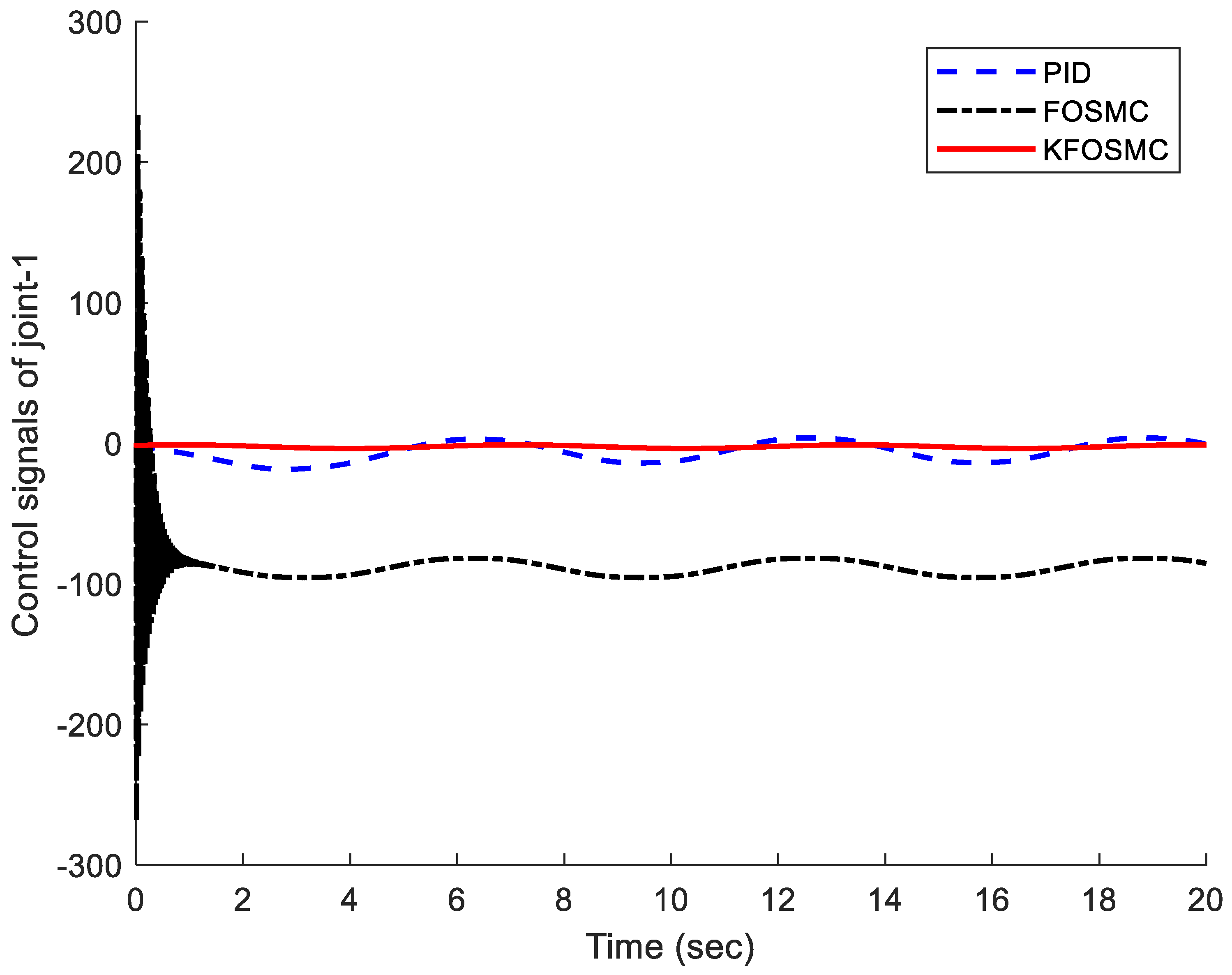
8. Simulation Results
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Cervantes, I.; Alvarez-Ramirez, J. On the PID tracking control of robot manipulators. Syst. Control Lett. 2001, 42, 37–46. [Google Scholar] [CrossRef]
- Su, Y.; Müller, P.C.; Zheng, C. Global asymptotic saturated PID control for robot manipulators. IEEE Trans. Control Syst. Technol. 2009, 18, 1280–1288. [Google Scholar] [CrossRef]
- Kelly, R. A tuning procedure for stable PID control of robot manipulators. Robotica 1995, 13, 141–148. [Google Scholar] [CrossRef]
- Kumar, J.S.; Amutha, E.K. Control and tracking of robotic manipulator using PID controller and hardware in Loop Simulation. In Proceedings of the 2014 International Conference on Communication and Network Technologies, Sivakasi, India, 18–19 December 2014; pp. 1–3. [Google Scholar]
- Ahmad, M.N.; Osman, J.H. Robust sliding mode control for robot manipulator tracking problem using a proportional-integral switching surface. In Proceedings of the Student Conference on Research and Development, Putrajaya, Malaysia, 25–26 August 2003; pp. 29–35. [Google Scholar]
- Piltan, F.; Sulaiman, N.B. Review of sliding mode control of robotic manipulator. World Appl. Sci. J. 2012, 18, 1855–1869. [Google Scholar]
- Islam, S.; Liu, X.P. Robust sliding mode control for robot manipulators. IEEE Trans. Ind. Electron. 2010, 58, 2444–2453. [Google Scholar] [CrossRef]
- Anavatti, S.G.; Salman, S.A.; Choi, J.Y. Fuzzy+ PID controller for robot manipulator. In Proceedings of the 2006 International Conference on Computational Inteligence for Modelling Control and Automation and International Conference on Intelligent Agents Web Technologies and International Commerce (CIMCA’06), Sydney, Austrilia, 29 November–1 December 2006; p. 75. [Google Scholar]
- Sharma, R.; Rana, K.P.S.; Kumar, V. Performance analysis of fractional order fuzzy PID controllers applied to a robotic manipulator. Expert Syst. Appl. 2014, 41, 4274–4289. [Google Scholar] [CrossRef]
- Ravari, A.N.; Taghirad, H.D. A novel hybrid Fuzzy-PID controller for tracking control of robot manipulators. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 1625–1630. [Google Scholar]
- Carron, A.; Arcari, E.; Wermelinger, M.; Hewing, L.; Hutter, M.; Zeilinger, M.N. Data-driven model predictive control for trajectory tracking with a robotic arm. IEEE Robot. Autom. Lett. 2019, 4, 3758–3765. [Google Scholar] [CrossRef]
- Wang, Y. Data-driven trajectory tracking of manipulator with event-triggered model updating. J. Phys. Conf. Ser. 2020, 1601, 062013. [Google Scholar] [CrossRef]
- Goswami, D.; Paley, D.A. Bilinearization, reachability, and optimal control of control-affine nonlinear systems: A Koopman spectral approach. IEEE Trans. Autom. Control 2021, 67, 2715–2728. [Google Scholar] [CrossRef]
- Shi, H.; Meng, M.Q.H. Deep koopman operator with control for nonlinear systems. IEEE Robot. Autom. Lett. 2022, 7, 7700–7707. [Google Scholar] [CrossRef]
- Calderón, H.M.; Hammoud, I.; Oehlschlägel, T.; Werner, H.; Kennel, R. Data-Driven Model Predictive Current Control for Synchronous Machines: A Koopman Operator Approach. In Proceedings of the 2022 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Sorrento, Italy, 22–24 June 2022; pp. 942–947. [Google Scholar]
- Husham, A.; Kamwa, I.; Abido, M.A.; Suprême, H. Decentralized Stability Enhancement of DFIG-Based Wind Farms in Large Power Systems: Koopman Theoretic Approach. IEEE Access 2022, 10, 27684–27697. [Google Scholar] [CrossRef]
- Narasingam, A.; Son, S.H.; Kwon, J.S.I. Data-driven feedback stabilisation of nonlinear systems: Koopman-based model predictive control. Int. J. Control 2022, 96, 770–781. [Google Scholar] [CrossRef]
- Junker, A.; Timmermann, J.; Trächtler, A. Data-driven models for control engineering applications using the Koopman operator. In Proceedings of the 2022 3rd International Conference on Artificial Intelligence, Robotics and Control (AIRC), Virtual, 20–22 May 2022; pp. 1–9. [Google Scholar]
- Shi, L.; Karydis, K. ACD-EDMD: Analytical Construction for Dictionaries of Lifting Functions in Koopman Operator-Based Nonlinear Robotic Systems. IEEE Robot. Autom. Lett. 2021, 7, 906–913. [Google Scholar] [CrossRef]
- Williams, M.O.; Hemati, M.S.; Dawson, S.T.; Kevrekidis, I.G.; Rowley, C.W. Extending data-driven Koopman analysis to actuated systems. IFAC Pap. 2016, 49, 704–709. [Google Scholar] [CrossRef]
- Rahmani, M.; Rahman, M.H. Adaptive neural network fast fractional sliding mode control of a 7-DOF exoskeleton robot. Int. J. Control Autom. Syst. 2020, 18, 124–133. [Google Scholar] [CrossRef]
- Sun, S.; Yin, Y.; Wang, X.; Xu, D. Robust landmark detection and position measurement based on monocular vision for autonomous aerial refueling of UAVs. IEEE Trans. Cybern. 2018, 49, 4167–4179. [Google Scholar] [CrossRef] [PubMed]
- Jin, M.; Lee, J.; Chang, P.H.; Choi, C. Practical nonsingular terminal sliding-mode control of robot manipulators for high-accuracy tracking control. IEEE Trans. Ind. Electron. 2009, 56, 3593–3601. [Google Scholar]
- Rahmani, M.; Komijani, H.; Rahman, M.H. New sliding mode control of 2-DOF robot manipulator based on extended grey wolf optimizer. Int. J. Control Autom. Syst. 2020, 18, 1572–1580. [Google Scholar] [CrossRef]
- Giap, V.; Vu, H.; Nguyen, Q.; Huang, S.C. Chattering-free sliding mode control-based disturbance observer for MEMS gyroscope system. Microsyst. Technol. 2022, 28, 1867–1877. [Google Scholar] [CrossRef]
- Ping, Z.; Yin, Z.; Li, X.; Liu, Y.; Yang, T. Deep Koopman model predictive control for enhancing transient stability in power grids. Int. J. Robust Nonlinear Control 2021, 31, 1964–1978. [Google Scholar] [CrossRef]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Data-driven discovery of Koopman eigenfunctions for control. Mach. Learn. Sci. Technol. 2021, 2, 035023. [Google Scholar] [CrossRef]
- Snyder, G.; Song, Z. Koopman Operator Theory for Nonlinear Dynamic Modeling using Dynamic Mode Decomposition. arXiv 2021, arXiv:2110.08442. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahmani, M.; Redkar, S. Robot Manipulator Control Using a Robust Data-Driven Method. Fractal Fract. 2023, 7, 692. https://doi.org/10.3390/fractalfract7090692
Rahmani M, Redkar S. Robot Manipulator Control Using a Robust Data-Driven Method. Fractal and Fractional. 2023; 7(9):692. https://doi.org/10.3390/fractalfract7090692
Chicago/Turabian StyleRahmani, Mehran, and Sangram Redkar. 2023. "Robot Manipulator Control Using a Robust Data-Driven Method" Fractal and Fractional 7, no. 9: 692. https://doi.org/10.3390/fractalfract7090692
APA StyleRahmani, M., & Redkar, S. (2023). Robot Manipulator Control Using a Robust Data-Driven Method. Fractal and Fractional, 7(9), 692. https://doi.org/10.3390/fractalfract7090692