Abstract
At present, the integration of microgrids into power systems presents significant power quality challenges in terms of the rising adoption of nonlinear loads and electric vehicles. Ensuring the stability and efficiency of the electrical network in this evolving landscape is crucial. This paper explores the implementation of cascading Proportional–Integral (PI-PI) and cascading Fractional-Order PI (FOPI-FOPI) controllers for a Distribution Static Compensator (DSTATCOM) in hybrid microgrids that include photovoltaic (PV) systems and fuel cells. A novel hybrid optimization algorithm, WSO-WOA, is introduced to enhance power quality. This algorithm leverages the strengths of the White Shark Optimization (WSO) algorithm and the Whale Optimization Algorithm (WOA), with WSO generating new candidate solutions and WOA exploring alternative search areas when WSO does not converge on optimal results. The proposed approach was rigorously tested through multiple case studies and compared with established metaheuristic algorithms. The findings demonstrate that the WSO-WOA hybrid algorithm significantly outperforms others in optimizing the PI-PI and FOPI-FOPI controllers. The WSO-WOA algorithm showed an improvement in accuracy, surpassing the other algorithms by approximately 7.29% to 14.1% in the tuning of the PI-PI controller and about 8.5% to 21.2% in the tuning of the FOPI-FOPI controller. Additionally, the results confirm the superior performance of the FOPI-FOPI controller over the PI-PI controller in enhancing the effectiveness of the DSTATCOM across various scenarios. The FOPI-FOPI provided controller a reduced settling time by at least 30.5–56.1%, resulting in marked improvements in voltage regulation and overall power quality within the microgrid.
1. Introduction
The integration of microgrids into power systems represents a pivotal advancement in modern energy management, offering numerous benefits for both reliability and sustainability. Microgrids are localized energy systems that can function independently or alongside the main power network, providing a versatile and resilient solution to energy distribution. They enhance energy security by decentralizing power generation, thus reducing the reliance on large, centralized power plants and mitigating the risks associated with grid failures [1,2]. Additionally, microgrids can incorporate renewable energy sources such as solar and wind, promoting environmental sustainability and reducing greenhouse gas emissions [3,4]. Their potential to operate autonomously in island mode during outages could ensure a continuous power supply for critical infrastructures. Moreover, microgrids can optimize energy usage through advanced management systems, leading to increased efficiency and cost savings. As the demand for reliable, clean, and resilient energy solutions grows, the integration of microgrids into power systems stands as a crucial step toward achieving a sustainable and secure energy future [5,6,7].
The integration of microgrids into power systems introduces several power quality issues that must be meticulously addressed to guarantee the stability and efficiency of the overall electrical network. One significant concern is the potential for voltage fluctuations and imbalance [8]. Microgrids, particularly those that incorporate renewable energy sources such as solar and wind, are prone to generating intermittent and variable power outputs. This variability can lead to voltage sags or swells, which can affect the performance and lifespan of sensitive electronic equipment and industrial processes. To mitigate these issues, advanced voltage regulation and stabilization techniques, including the use of dynamic reactive power compensation, must be implemented. Harmonic distortion is another critical power quality issue associated with microgrid integration. The increased use of power electronic devices in microgrids, such as inverters and converters, can provide harmonics to the power network. These harmonics can distort the waveform of the electrical supply, leading to a range of adverse effects, including the overheating of equipment, the malfunction of protective devices, and the reduced efficiency of electrical machines. Effective harmonic filtering and the adoption of standards for harmonic limits are essential measures to address this problem [9,10].
Power quality (PQ) improvement strategies are essential for maintaining the reliability and efficiency of modern power systems, particularly as they become increasingly complex with the integration of renewable energy sources and advanced technologies [11,12]. One of the primary strategies is the implementation of power conditioning devices, such as dynamic voltage restorers and static synchronous compensators. These devices help to mitigate voltage sags, swells, and interruptions by providing immediate corrective action to maintain voltage stability and continuity of supply. Another crucial strategy involves the use of advanced harmonic filtering techniques. Harmonics, generated by non-linear loads and power electronic devices, can distort the electrical waveform, leading to equipment overheating, increased losses, and interference with communication systems. Active and passive filters are deployed to eliminate or reduce harmonic distortion, improving overall power quality. Active filters dynamically adjust their response to changing harmonic levels, while passive filters provide a steady reduction in specific harmonic frequencies [10,13].
PQ issues in electrical distribution systems can be effectively addressed using Distribution Static Synchronous Compensators (DSTATCOMs). Among the various strategies for PQ improvement, DSTATCOMs have emerged as highly effective solutions. The integration of DSTATCOMs into power systems involves multiple topologies, each designed to cater to specific system requirements and configurations. One widely used topology is the three-phase three-wire (3P3W) DSTATCOM, implemented in 3P3W distribution systems to improve PQ and compensate loads. This topology is subdivided into non-isolated and isolated voltage source inverter (VSI)-based configurations. Regarding non-isolated 3P3W VSI-based DSTATCOMs, they can be further categorized into topologies using three-leg or two-leg VSIs. The three-leg VSI topology is commonly discussed in the literature for its effectiveness, whereas the two-leg VSI topology is preferred for its reduced number of switching devices, though it faces challenges in regulating DC capacitor voltages and requiring high DC voltages [14,15]. However, isolated 3P3W VSI-based DSTATCOMs involve using three single-phase VSIs or configurations with a Y/Δ transformer, which offers system isolation and matches the kVA rating required for reactive power injection. Despite the higher number of switching devices in some isolated topologies, they provide benefits such as isolation and flexibility in transformer configurations to meet specific PQ improvement needs. Another crucial topology is the three-phase four-wire (3P4W) DSTATCOM, employed in 3P4W distribution systems. These topologies are designed to handle the additional neutral current and provide effective compensation for nonlinear and unbalanced loads in such systems. By implementing various configurations of 3P4W DSTATCOMs, including those with split capacitors and multiple VSIs, PQ issues like harmonics, voltage sags, and swells can be mitigated efficiently [15].
The control strategies for DSTATCOMs can enhance the overall system performance by providing reactive power support and maintaining power quality. They aim to enhance overall system performance and encompass several advanced methodologies. The synchronous reference frame (SRF) theory is a key approach in power electronics and power systems. It uses the supply voltage to derive a rotating reference frame synchronized with the grid voltage. This synchronization is achieved by employing the grid voltage components, typically represented by sine and cosine values, in the Park transformation that converts the three-phase load current quantities into direct (d-axis) and quadrature (q-axis) components in the SRF. This transformation is crucial as it facilitates the precise regulation of reactive power, maintaining optimal PQ. The SRF theory is widely adopted in various applications, including grid-connected inverters, motor drives, and active power filters, where the precise control of PQ and system dynamics is crucial [14,15].
Instantaneous reactive power (IRP) theory is another important approach. In this theory, the DSTATCOM alters its current to match the desired waveform’s peak harmonic magnitude by measuring the source voltage and load currents, which are then transformed using the Clarke transformation. This conversion translates the three-phase quantities into two-phase orthogonal coordinates. This transformation is essential for accurately calculating the instantaneous active and reactive power components. This enables the DSTATCOM to effectively regulate reactive power, thus enhancing the system PQ and overall performance. In the realm of control algorithms, the Proportional–Integral (PI) control method and the Fractional-Order PI controller are widely embraced for their simplicity and effectiveness in minimizing steady-state errors. Proportional–resonant control is highly regarded for its capability to eliminate steady-state errors when tracking sinusoidal signals, making it especially advantageous in grid-connected applications. Hysteresis control, known for its fast dynamic response and straightforward implementation, is also notable, though it has the drawback of producing inconsistent switching frequencies. Moreover, control methods based on optimization algorithms utilize evolutionary strategies to fine-tune control parameters, thereby boosting system efficiency and performance. These advanced control algorithms work together to enhance the stability, responsiveness, and overall effectiveness of DSTATCOM systems in maintaining power quality and voltage regulation.
Recent advancements in DSTATCOM control strategies have introduced a range of innovative approaches to enhance system performance. A notable development is the proposal of a Type-2 Fuzzy Logic Controller (FLC) with a recursive least square filter designed to improve control precision [16]. Additionally, a conjugate gradient backpropagation method based on the icos(ϕ) neural network has been applied, resulting in significant gains in system accuracy [17]. The introduction of a generalized neural network (NN) algorithm, which combines Gaussian, sigmoidal, and linear transfer functions, has further broadened the versatility of DSTATCOM control [18]. The adoption of an enhanced model predictive control (MPC)-based state-space model, along with the application of MPC to a newly developed four-level inverter-based DSTATCOM, has led to marked improvements in dynamic response and stability [19,20]. Furthermore, an adaptive neuro-fuzzy inference system (ANFIS) utilizing least-mean-square algorithms has proven effective in compensating for current disturbances [21]. Other advancements include the development of an improved Widrow–Hoff algorithm-based adaptive control [22], as well as the implementation of an adaptive reweighted zero-attracting control for a DSTATCOM-based photovoltaic source [23]. Finally, significant research has focused on the tuning of PI controllers, employing methods such as the Differential Search Algorithm and Wind-Driven Optimization [24], as well as the integration of particle swarm and ant colony optimization, both of which have substantially enhanced the performance of DSTATCOM systems [25].
The PI controller, Fractional-Order PI (FOPI) controller, and cascading controllers are extensively utilized to enhance power quality and maintain voltage stability. The PI controller effectively minimizes steady-state errors by integrating past control actions, ensuring rapid correction of voltage deviations. However, system nonlinearities and dynamic changes can adversely affect its performance, leading to oscillations and extended settling times. While FOPI controllers can offer improved system performance, they are often more sensitive to disturbances and noise, which can result in instability if not carefully tuned [26,27,28]. In contrast, cascading controllers, which typically involve multiple layers of control strategies, provide enhanced responsiveness and robustness against disturbances. Nevertheless, these cascading systems can become complex, making parameter tuning more challenging [29,30]. Both controller types may also encounter difficulties under extreme operating conditions, where saturation effects can lead to inadequate compensation and system instability. Thus, while PI, FOPI, and cascading controllers are valuable for many applications, their limitations highlight the need for meticulous design and tuning to optimize performance in real-world scenarios.
This paper elaborates on the application of cascading Proportional–Integral (PI-PI) and cascading Fractional-Order PI (FOPI-FOPI) controllers for DSTATCOMs in hybrid microgrids that incorporate photovoltaic (PV) systems and fuel cells. A novel hybrid optimization algorithm has been developed to accurately tune the proposed controller and enhance power quality. Table 1 presents a comparative analysis of this work alongside existing studies. The principal novel contributions of this research are outlined as follows:

Table 1.
A comparative analysis of the proposed work with existing studies.
- A new hybrid optimization algorithm (WSO-WOA) is introduced. It integrates the White Shark Optimization (WSO) and Whale Optimization Algorithm (WOA) strengths. This hybrid approach leverages the distinct advantages of both algorithms to enhance optimization performance and accuracy.
- The paper provides a detailed comparative analysis of two cascading control strategies: the PI-PI controller and the FOPI-FOPI controller. This evaluation focuses on their application in a DSTATCOM integrated into a hybrid MG, highlighting their effectiveness in different operational scenarios.
- A thorough performance analysis of the proposed hybrid algorithm and the cascading controllers was conducted under a range of power conditioning issues, including conditions such as voltage sags, swells, and faults. This provided a comprehensive understanding of their behavior and effectiveness in managing power quality disturbances.
- The paper also includes a comparative analysis of the proposed hybrid algorithm against other well-known optimization algorithms. This comparison evaluates the relative performance of the WSO-WOA hybrid approach in terms of accuracy, convergence speed, and overall effectiveness in optimizing the control strategies.
The remainder of this paper is organized as follows: Section 2 introduces the mathematical model of the hybrid MG, establishing a foundational understanding of its components and their interactions. Section 3 delves into the control mechanisms used for the various elements within the MG. Section 4 details the cascading control strategy implemented for the DSTATCOM. Section 5 describes the operational mechanism of the proposed WSO-WOA algorithm and its role in enhancing optimization performance. Section 6 thoroughly analyzes the results from various case studies, highlighting the practical impact of the proposed methods. Finally, Section 7 concludes the paper, summarizing the key findings and contributions of the research.
2. Mathematical Model of the Hybrid MG System
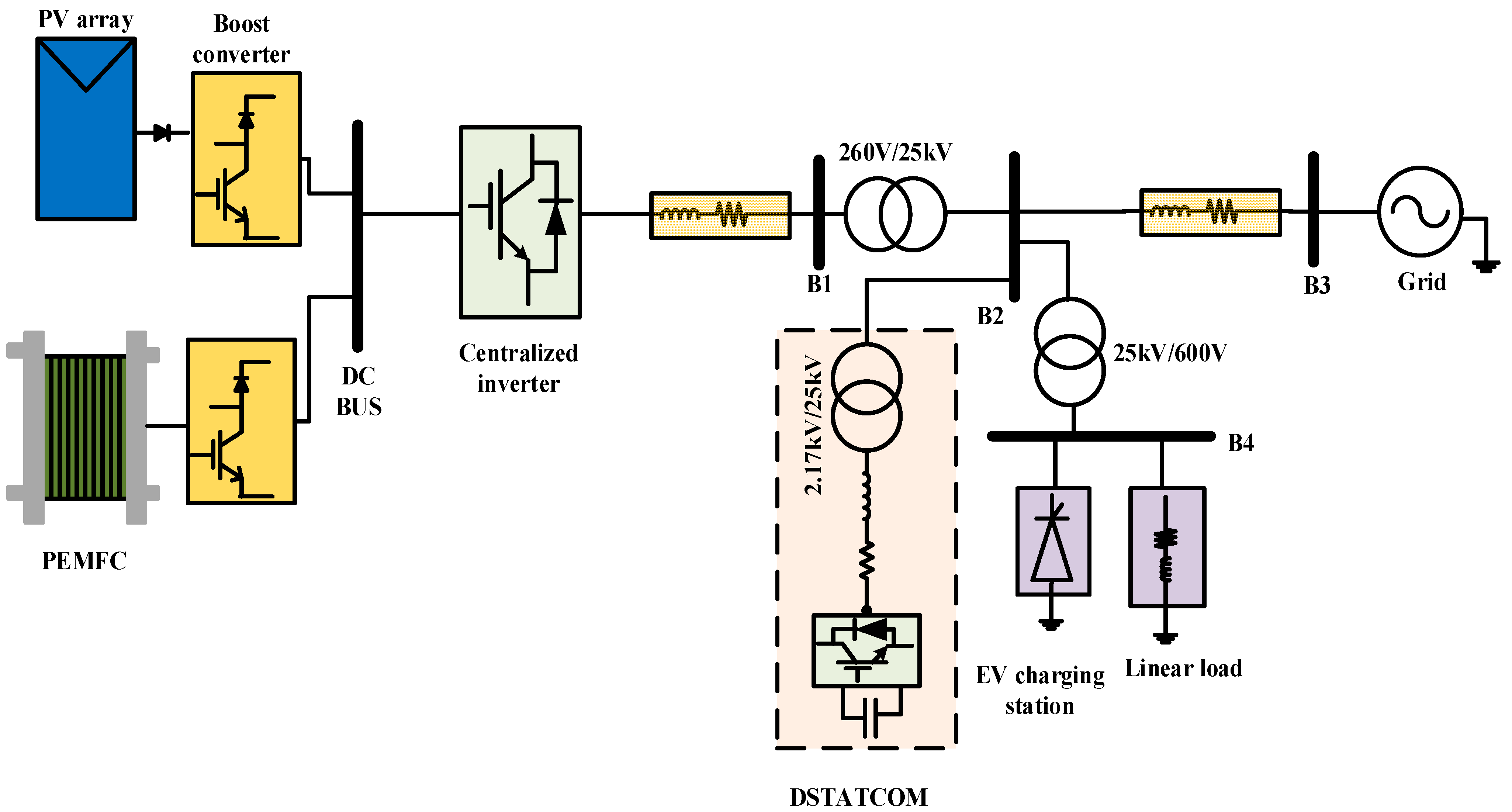
The MG under consideration is composed of a solar photovoltaic (PV) array, a proton exchange membrane fuel cell (PEMFC), and the main grid, as shown in Figure 1. These sources are interconnected through a centralized three-phase grid-connected inverter, which serves as the link between the MG and the main grid through a step-up transformer connected between B1 and B2. This configuration is designed to provide reliable power to both residential and industrial loads, as well as to an electric vehicle (EV) charging station. To ensure the stability and quality of power at the EV charging station bus (B4), a DSTATCOM is integrated into the system. The primary function of the DSTATCOM is to enhance the dynamic voltage profile and mitigate transient voltage issues that may arise due to fluctuating load demands or grid disturbances. This addition is crucial in maintaining consistent voltage levels, thereby ensuring the efficient operation of the charging station and the overall microgrid. Figure 1 offers a visual representation of the microgrid’s integration with the DSTATCOM at the EV bus, highlighting the interconnectedness of the components and their role in supporting a stable and resilient power supply. Table 2 provides detailed parameters of the electrical equipment used within the system, including specifications for the PV array, PEMFC, inverter, and DSTATCOM.
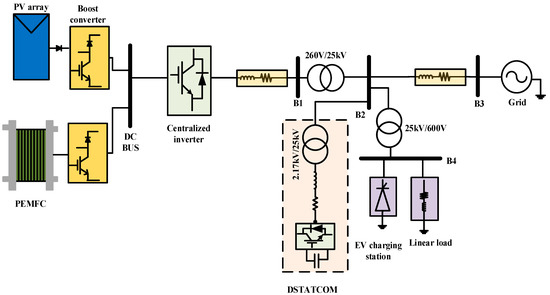
Figure 1.
The layout of the hybrid MG investigated in this work.
Table 2.
Data of the investigated hybrid MG.
2.1. PV System
The single diode model, known as the five-parameter model of the equivalent circuit of a solar cell, is mathematically used to represent the PV array. The output current of the PV module () is determined as follows [31]:
The output voltage is denoted as . Iph represents the light-generated current, while refers to the diode reverse saturation current (in amperes). The diode ideality factor is denoted by b. Kb is Boltzmann’s constant, valued at 1.3805 × 10⁻23 J/K, and q represents the electron charge, equal to 1.6 × 10–19 Coulombs. and represent the number of cells connected in series and parallel, respectively. The cell’s operating temperature, in Kelvin, is indicated by T. Additionally, the photocurrent Iph of a PV cell is influenced by temperature and solar irradiance, as described by (2):
is the temperature coefficient of the short-circuit current at Isc. The cell series resistance, measured in ohms, is represented by Rs. The shunt resistance in the system is typically very high, and it is often reasonable to neglect it when conducting the analysis. This simplifies the overall analysis process.
2.2. PEM Fuel Cell System
The FC stack output voltage comprising NFC cells can be mathematically determined using the following equation [32,33]:
The power produced by the PEMFC can then be calculated using (4) [32,33]:
IFC refers to the fuel cell current measured (A), and Vcell represents the output voltage of an individual cell. The expression for Vcell is given in (5) [32,33]:
In (3), Enernst represents the electric potential of the cell, commonly referred to as the Nernst equation. The operating temperature of the PEMFC, represented as T and measured in Kelvin, is a key parameter. The partial pressures of hydrogen and oxygen are denoted as PH2 and PO2, respectively.
Vact represents the voltage drop due to the reaction rates at the electrodes and is determined by (5). The fuel cell’s performance is influenced by several critical coefficients, denoted as and . CO2 represents the concentration of dissolved oxygen at the catalytic interface is computed using (8).
Vohm indicates the voltage loss caused by resistance to proton flow in the electrolyte, as described by (6). The electrode resistance () is determined using (9), which accounts for the length of the electrolyte (). In addition, denotes the membrane water content.
Lastly, Vconc accounts for the voltage loss resulting from the decrease in gas concentration and is calculated as follows:
The gas constant, denoted as R, is measured in mol/Kelvin is important in thermodynamic calculations. The Faraday constant, represented by F, is another essential parameter fundamental to electrochemical reactions. The maximum current density of the fuel cell is indicated by , with units of Amp/cm2, reflecting the highest achievable current per unit area. Additionally, A represents the cell area, measured in cm2, which directly influences the overall performance and efficiency of the fuel cell. Each of these parameters is integral to understanding and optimizing the fuel cell’s operation.
2.3. Centralized Voltage Source Inverter (CVSI)
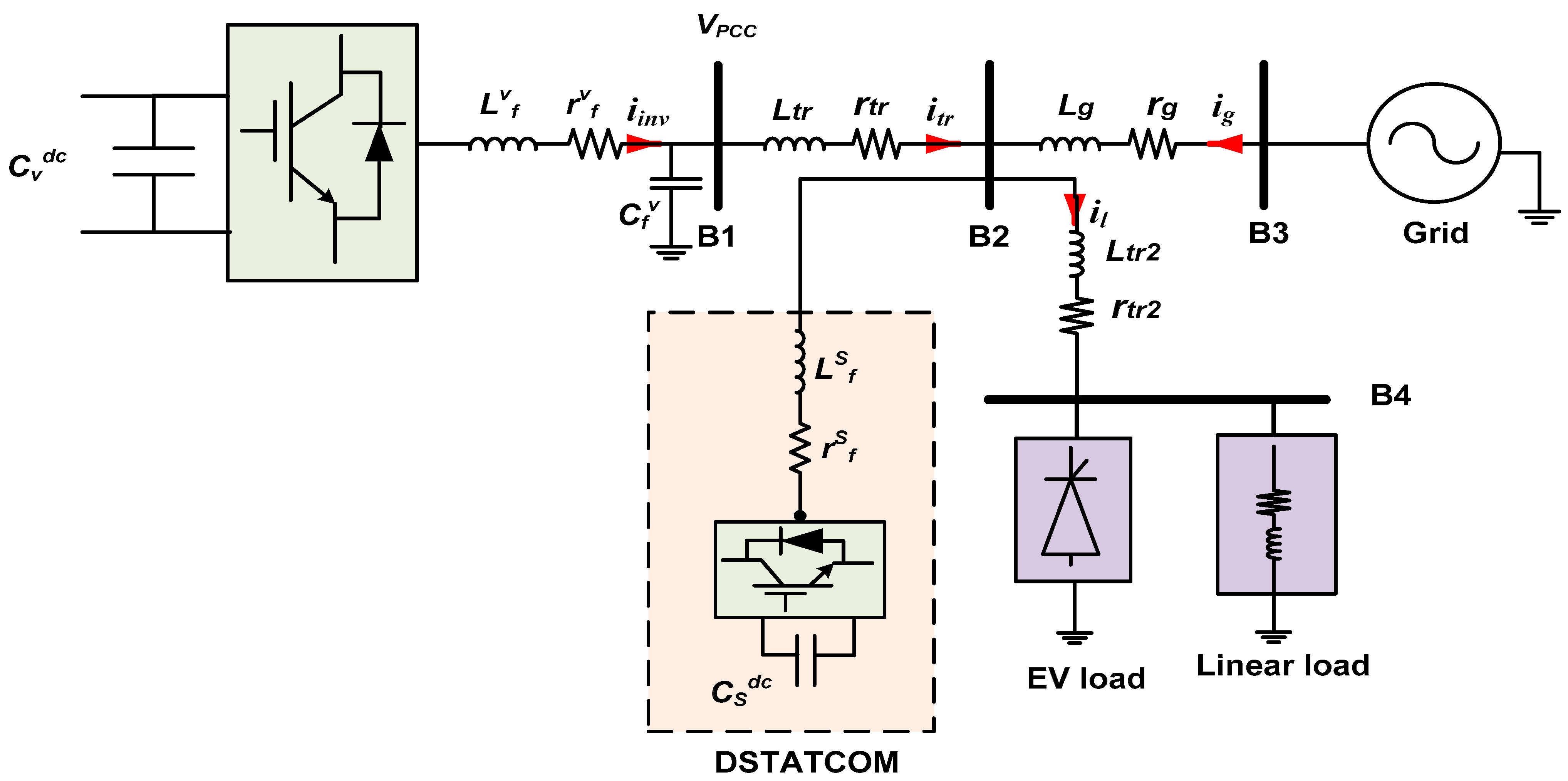
The systematic diagram of the CVSI is presented in Figure 2. In the analysis of this system, the microgrid frequency, denoted as ω, determines the dynamic behavior of the system. By utilizing the synchronous d–q reference frame, which simplifies the analysis of three-phase systems, the governing equations for both the inductor current and the output voltages of the CVSI are derived in (12) and (13). These equations are essential for understanding the interaction between the CVSI and the rest of the microgrid, particularly in how they regulate power flow and maintain voltage stability.
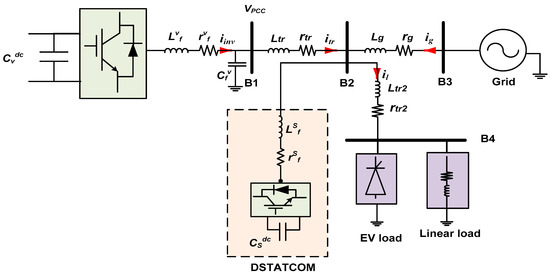
Figure 2.
Systematic diagram of the centralized grid connected system.
2.4. Utility Grid
The balanced three-phase four-wire system operating at 25 kV and 60 Hz utility grid is interfaced with the AC sub-grid at B3. It is modeled as a 3P programmable voltage source in series with an RL branch that generates a three-phase sinusoidal waveform with time-varying parameters. In grid-connected mode, the grid’s frequency, voltage, and phase angle are employed as reference signals for the CVSI, which operate synchronously with the grid to ensure overall system stability.
2.5. DSTATCOM
The DSTATCOM is composed of a DC capacitor, a VSI, and a coupling filter, as shown in Figure 2. The coupling filter serves a critical role by enabling the DSTATCOM to connect to the power grid. It injects compensating currents at B4, thereby enhancing PQ. The system’s dynamics in the SRF can be expressed as:
Thus, according to the power balance theory,
The DSTATCOM’s active and reactive powers are calculated as follows:
3. Control Units of the Hybrid MG
3.1. Control Units of PV System
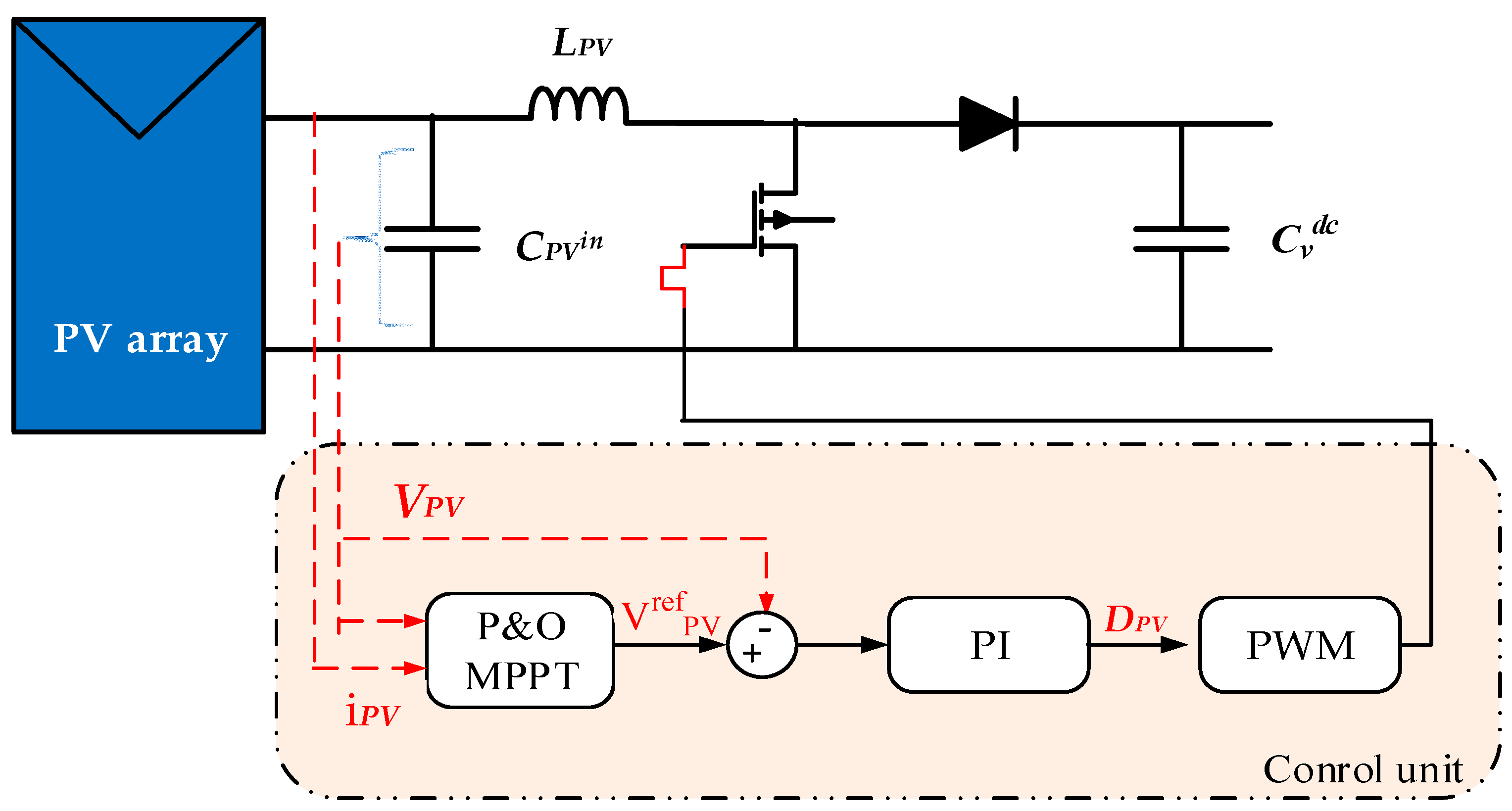
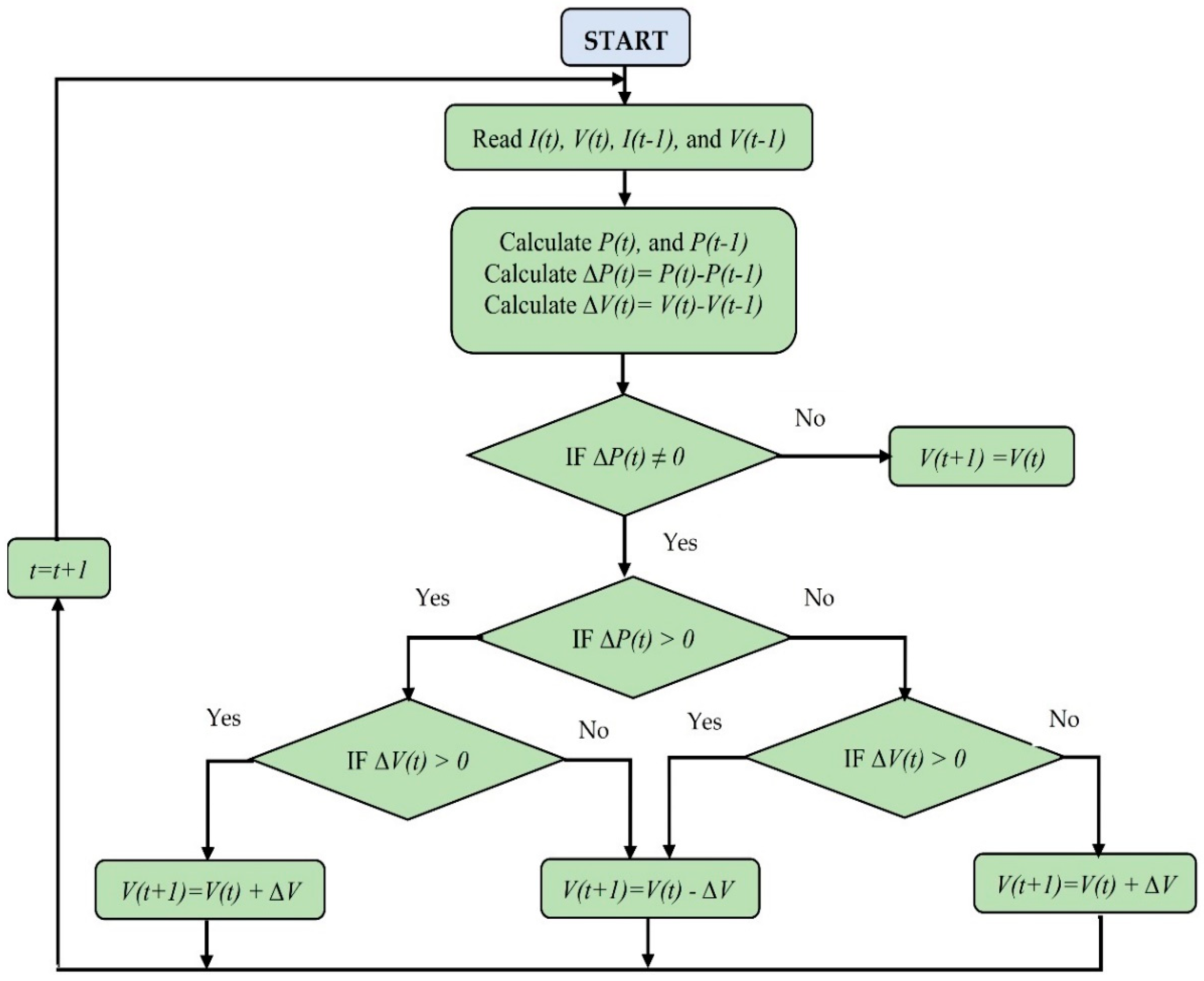
A PV array inherently exhibits nonlinear performance, which fluctuates in response to changes in solar radiation and temperature. To optimize the efficiency of energy conversion, these PV arrays are typically coupled with a boost converter. As depicted in Figure 3, the boost converter plays a crucial dual role. First, it tracks the maximum power point (MPP) on the power-voltage curve, ensuring that the system operates at peak efficiency. Second, it increases the output voltage to meet the DC link voltage requirement for grid-connected inverters, thereby enabling seamless integration into the power grid. In this work, the Perturb and Observe (P&O) algorithm, depicted in Figure 4, is used as the maximum power point tracking (MPPT) strategy for the PV array system. The P&O algorithm is a widely used MPPT technique known for its simplicity and effectiveness in continuously adjusting the operating point of the PV array to extract the maximum available power under varying environmental conditions. This approach ensures that the PV system consistently delivers optimal performance, even in the face of dynamic changes in sunlight and temperature. As illustrated in Figure 3, a PI controller regulates this reference voltage signal. The PI controller maintains system stability and efficiency by minimizing errors between actual and desired performance. It adjusts the reference voltage V(t+1) to ensure the system can respond effectively to fluctuations in operating conditions, such as changes in load or environmental factors. By continuously refining the reference signal, the PI controller helps maintain optimal operating conditions, thereby enhancing the overall efficiency and reliability of the PV array system.
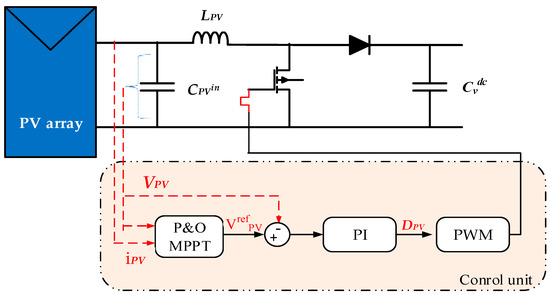
Figure 3.
Control unit of the PV array.
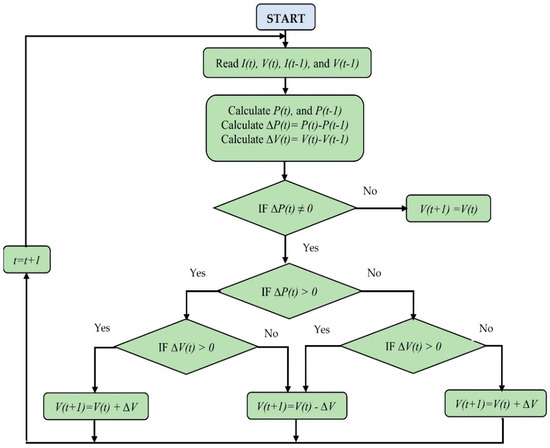
Figure 4.
The procedure of the P&O algorithm.
3.2. Control Units of PEMFC System
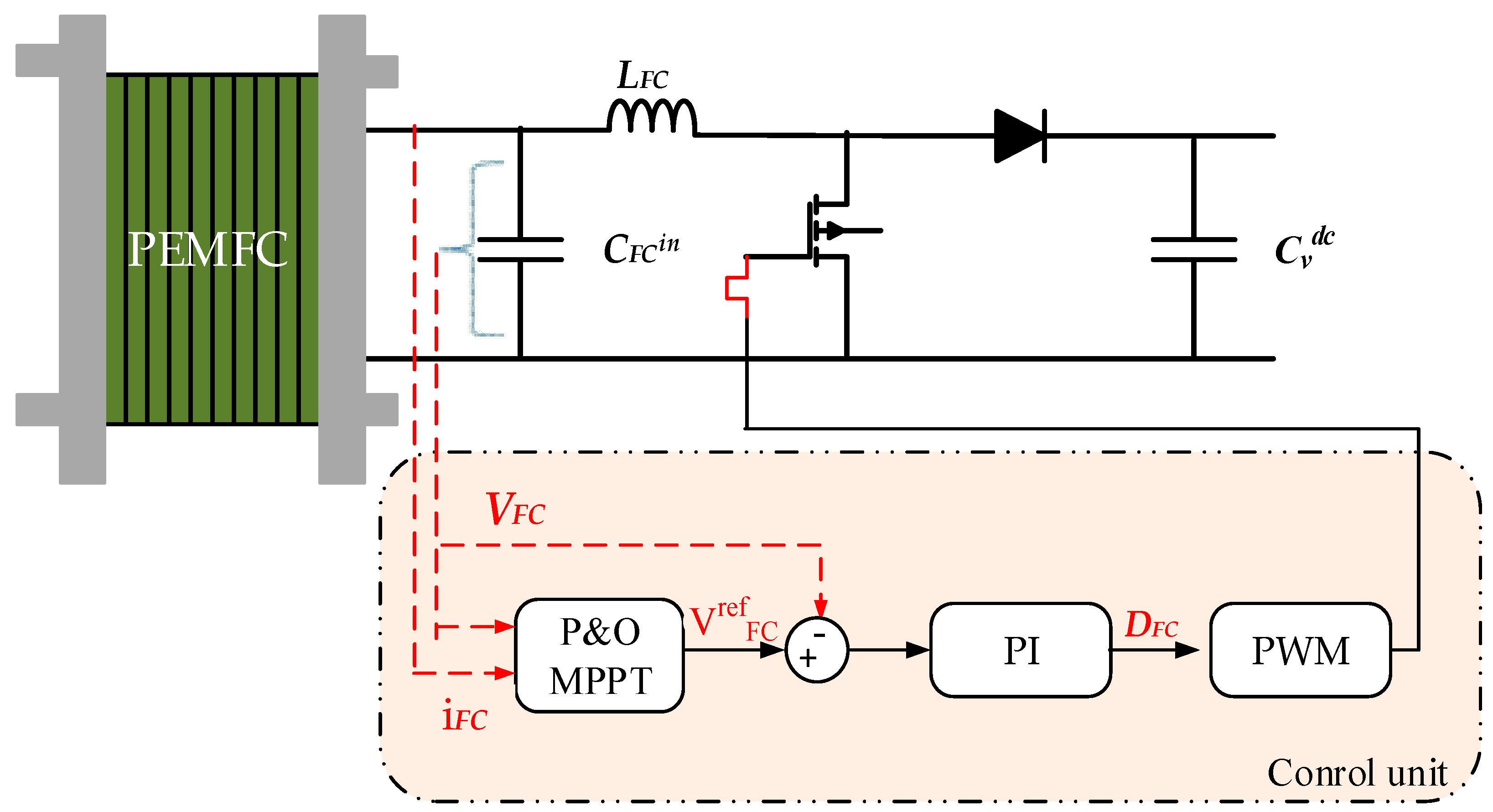
Several factors, including temperature, pressure, and the partial pressures of hydrogen and oxygen, influence the MPP of PEM fuel cells. These factors collectively determine the optimal operating point of the fuel cell, where energy conversion is most efficient. Given PEM fuel cells’ inherently nonlinear voltage–current characteristics, the integration of MPPT within PEMFC-based MGs is crucial. This integration is essential to adapt to the varying conditions of operation, maximize energy extraction, and enhance the overall efficiency and reliability of the system. To achieve this, PEM fuel cells are typically connected to DC-DC converters, which are key in adjusting the input resistance to match the maximum power point. In this study, a boost converter is interfaced with the PEMFC, as depicted in Figure 5, to perform this adjustment. The boost converter increases the output voltage to a level suitable for subsequent power conversion stages and ensures that the system operates at its maximum power point.
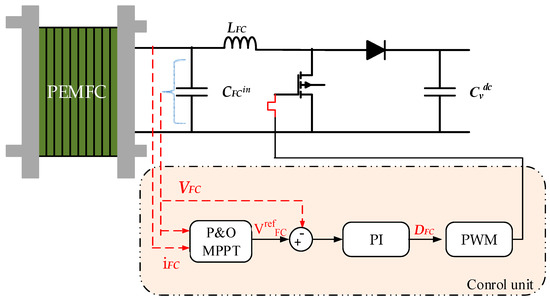
Figure 5.
Control unit the PEMFC.
To optimize the performance of the boost converter, the P&O algorithm is employed, as illustrated in Figure 4. This algorithm is a widely adopted MPPT technique that continuously adjusts the operating point of the PEMFC to maximize power output under varying environmental and load conditions. The P&O algorithm works by perturbing the system’s operating point and observing the resulting changes in power output. If the power increases, the perturbation is continued in the same direction; otherwise, it is reversed. A PI controller regulates the reference voltage signal calculated by the P&O algorithm to further refine the system’s response. The PI controller ensures that the system maintains the desired operating conditions by minimizing the error between the actual and reference signals, thereby enhancing the overall stability and efficiency of the PEMFC-based microgrid.
3.3. Control Units of the CVSI
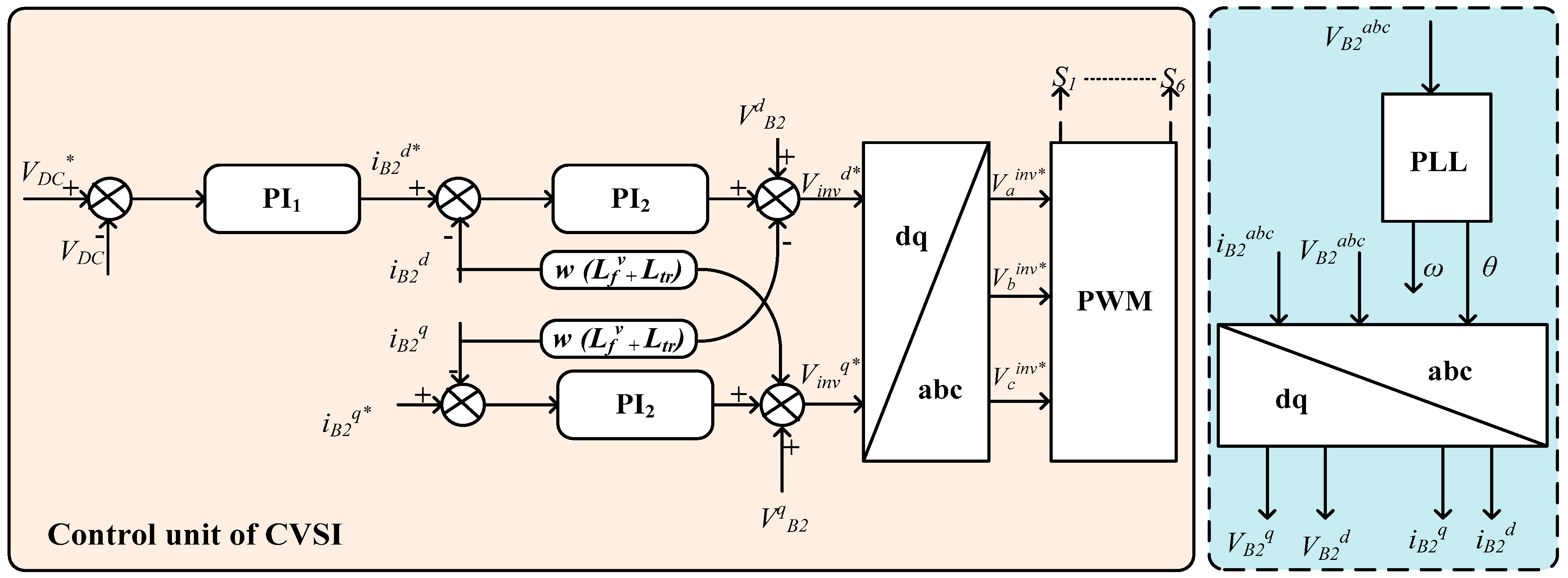
Figure 6 illustrates the control unit of the CVSI. Voltage-oriented control (VOC) is employed as a control strategy, widely recognized for its effectiveness in managing 3P grid-connected inverters. VOC is valuable in renewable energy systems, where accurate power flow management ensures system stability, efficiency, and compliance with grid standards. The ability of VOC to maintain stable and efficient operation in varying conditions makes it a preferred choice in applications such as solar photovoltaic systems, wind turbines, and other distributed energy resources.
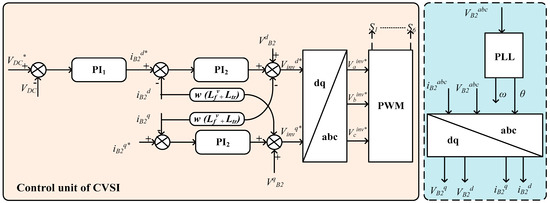
Figure 6.
Control unit the CVSI.
The core principle of VOC lies in transforming quantities of the 3P alternating current (AC) into a d-q reference frame. This transformation is essential as it simplifies the control of AC systems by converting the three-phase currents and voltages into two orthogonal components: d-axis and q-axis. In the d-q-frame, the active and reactive power components can be decoupled, allowing for the independent control of each component. This decoupling significantly streamlines control operations and enhances the precision with which power flow is managed.
In the context of VOC, the control objectives are divided into active () and reactive () power components. The active power component is responsible for real power transfer to the grid, while the reactive power component is involved in voltage regulation and power factor correction. The control system of the CVSI consists of three primary control loops. The first loop is designed to maintain a constant voltage across the DC link capacitor, while the second and third loops regulate the d-axis and q-axis components of the inverter current, as illustrated in Figure 6. A PI controller manages each of these control loops.
The control equations governing the VOC strategy, as shown in (18)–(21), define the relationship between the d-q-frame variables and the output power components. These equations are critical for implementing VOC in practical applications, ensuring that the inverter operates in harmony with grid requirements while maximizing the efficiency and stability of power conversion processes.
The variables and represent the d and q components of the grid voltage, respectively. The primary function of the PI controller is to regulate both the DC link voltage and the output currents of the inverter. This regulation is critical for maintaining the needed voltage level and true power factor at the PCC with the grid, as depicted in Figure 5. In control system design, it is common to incorporate grid voltage feedforward. This approach involves adding a feedforward term to the voltage reference equation. This strategy enhances the inverter’s responsiveness to fluctuations in grid voltage, thereby improving overall system stability and performance.
4. Control Units of the DSTATCOM
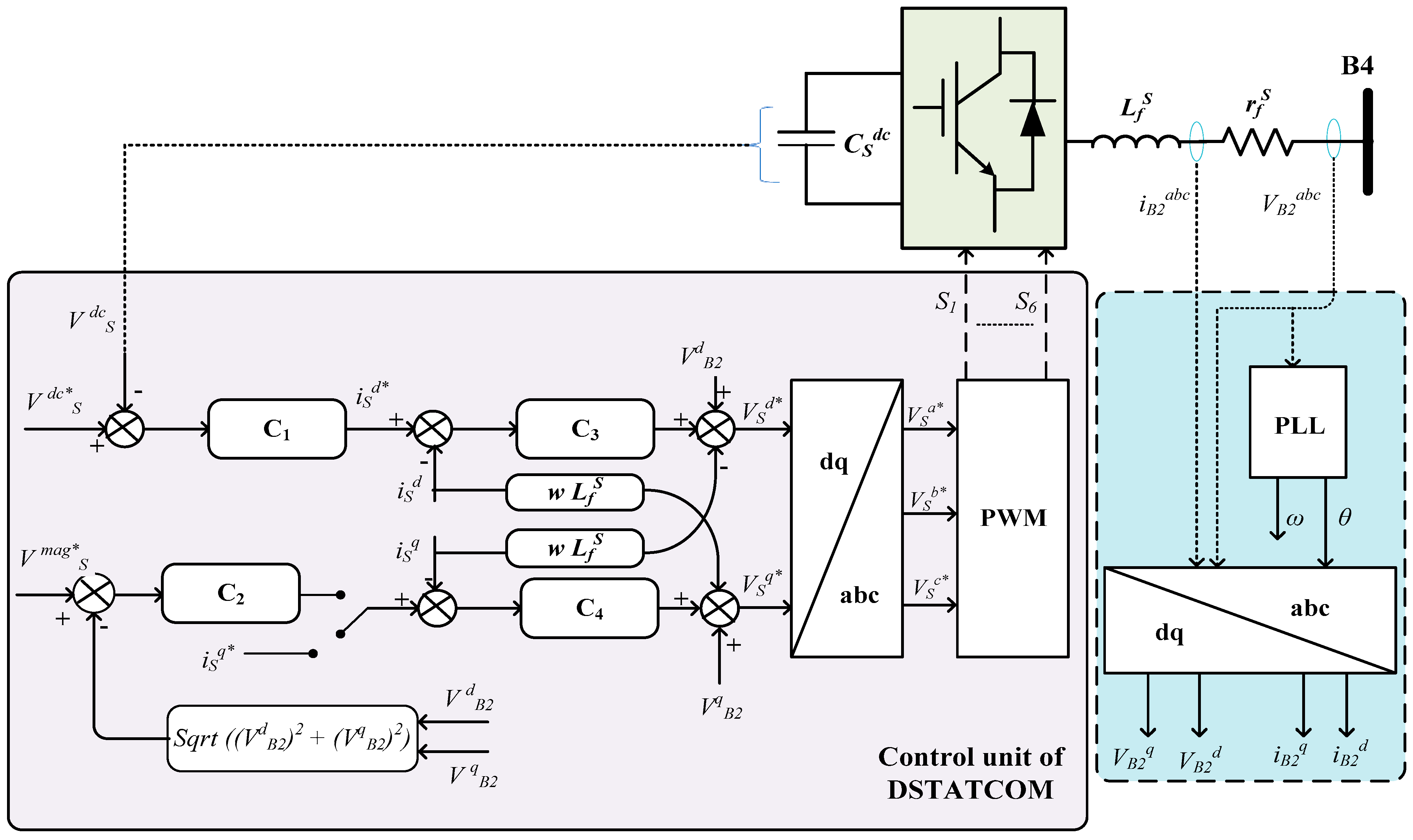
The control strategy of a DSTATCOM typically involves multiple control loops to regulate voltage and improve power quality in distribution systems, as shown in Figure 7. The outer voltage control loop is responsible for maintaining the DC link voltage () at a reference value (), ensuring sufficient energy storage for reactive power compensation. This loop generates the reference current for the inner current control loop (). The error between the measured DC link voltage and its reference is processed through controller C1, yielding the required reference current, as shown in (22).
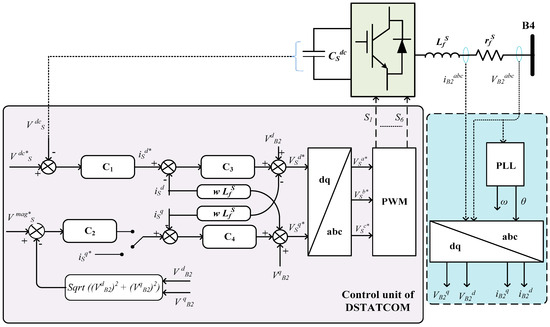
Figure 7.
Control unit the DSTATCOM.
The second outer control loop is employed to enhance the voltage profile at the load bus, as illustrated in Figure 7. The output of this loop serves as the reference signal for the q-axis component (), which can be determined using (23) or (24).
The inner current control loop regulates the DSTATCOM’s output currents along the d-axis () and q-axis components (). The control objective is to track the reference currents ( and ), which are derived from the outer loop and reactive power requirements. The C3 and C4 controllers in the inner loop generate the control voltages and as follows:
In this work, two cascading controllers, namely PI-PI and FOPI-FOPI, are employed to replace C1, C2, C3, and C4. Adopting cascading controllers offers several advantages over the traditional configuration, including improved dynamic response, enhanced stability, and greater flexibility in tuning for specific performance criteria. These benefits make cascading controllers particularly effective in complex control systems where precise regulation is essential.
The transfer function of the cascading PI-PI controller is presented in (27), illustrating its mathematical formulation and how it governs the system’s behavior. Similarly, the transfer function of the FOPI-FOPI controller is provided in (28), which highlights the distinct characteristics of Fractional-Order Controllers and their ability to offer superior control by accommodating a wider range of system dynamics. The choice between these two controllers depends on the application’s specific requirements, with each offering unique advantages in terms of performance and robustness.
Tuning the control unit’s parameters is a crucial aspect of control system design. This process is commonly treated as an optimization problem, with meta-heuristic algorithms frequently used to determine the optimal parameter settings.
- Fitness function formulation
The optimization may involve one or more objectives, subject to a defined set of constraints. The formulation of the objective function is pivotal, as it guides the optimization process towards achieving the desired control performance. In this study, the integral of time-weighted square error (ITSE) is employed as the objective function, denoted as ‘OF’, to evaluate system performance, as given in (29). The upper limit of the integral, represented by Tmax, is typically set to a value greater than the system’s settling time, ensuring that the integral converges to a steady-state value. The cumulative errors within the control circuit of the DSTATCOM, as described in (30)–(33), are used to define the objective function:
The proposed fitness function (OF) comprises four objectives (OF1, OF2, OF3, and OF4). The foremost objective (OF1) aims to minimize the ITSE of in the DSTATCOM (). Simultaneously, OF2 focuses on minimizing the ITSE of (), while OF3 targets the minimization of the ITSE of (). The fourth objective (OF4) seeks to reduce the ITSE of (). The constraints of the problem focus on the upper and lower limits of the controllers’ parameters, as well as the tolerated level of Total Harmonic Distortion (THD) in the signal fed into the grid, which is required to remain under 5%. These parameters can be delineated as follows:
- Computational Complexity Analysis,
The control unit of the DSTATCOM consists of four distinct loops: two outer loops for managing voltage and two inner current loops dedicated to current tracking, as shown in Figure 7. This structure is critical for achieving precise and responsive control.
As presented in (27) and (28), the PI-PI controller consists of four decision-making variables, while the FOPI-FOPI controller incorporates six control parameters, reflecting its more intricate design due to fractional-order dynamics. The computational complexity of each controller can be determined based on the number of decision-making variables and control parameters involved. The PI-PI controller’s complexity can be approximated by O(4k), and k signifies the number of control loops. This linear relationship indicates that the computational demand scales with the decision variables.
Conversely, the FOPI-FOPI controller’s complexity is influenced by the need for fractional-order calculations, which typically require more computational resources. This complexity can be expressed by O(6k). The analysis of computational complexity underscores the importance of optimizing both controllers to ensure real-time feasibility in practical applications. While the linear nature of the complexities suggests that the systems can efficiently handle the computations, the specific demands of fractional-order calculations in the FOPI-FOPI controller necessitate careful consideration in algorithm design.
5. The Hybrid White Shark Optimizer and Whale Optimization Algorithm (WSO-WOA)
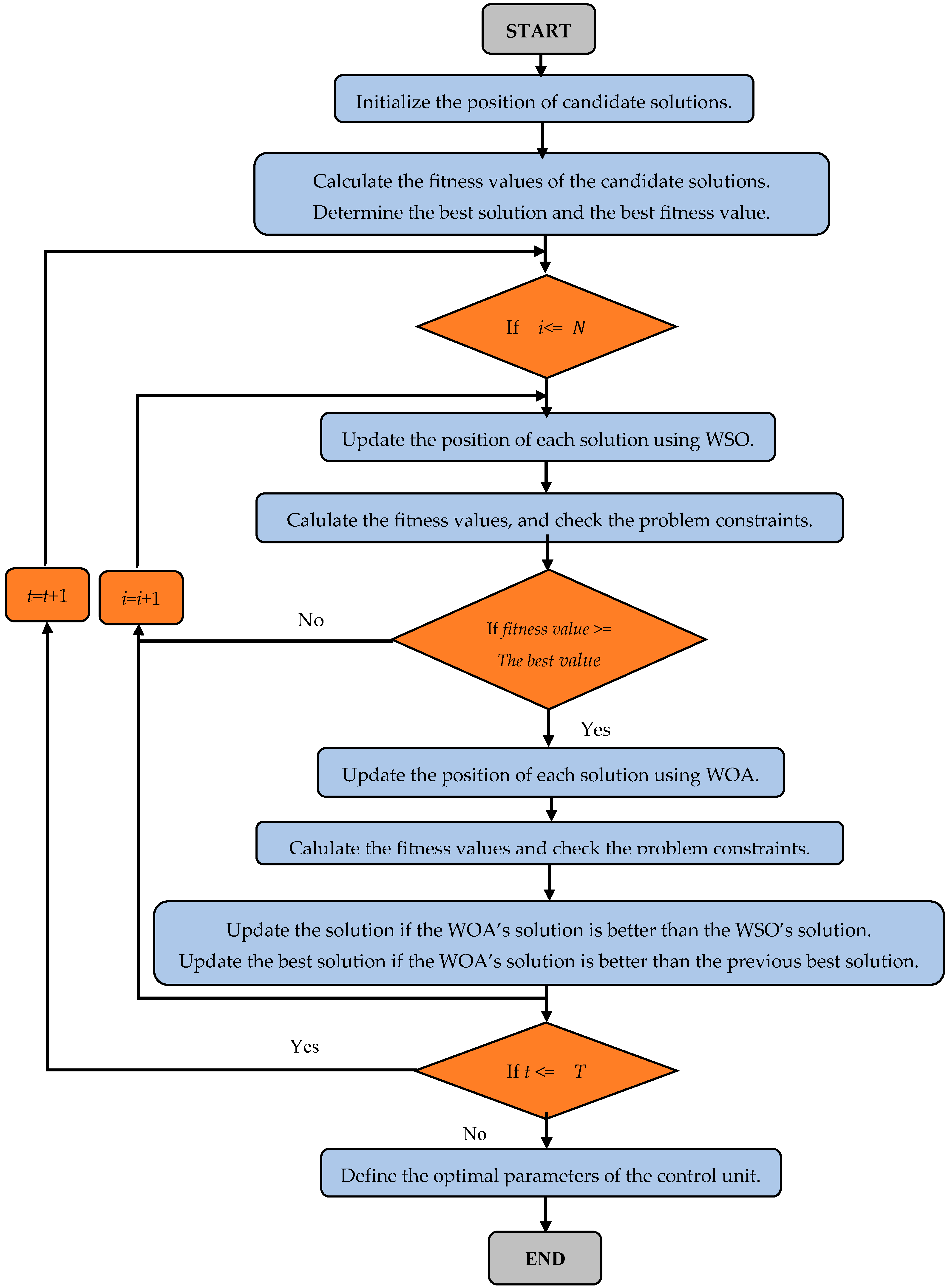
The proposed WSO-WOA algorithm integrates the updating mechanisms of the WSO and WOA to enhance the algorithm’s exploitation and exploration capabilities. As depicted in Figure 8, the WSO-WOA primarily relies on the WSO to update the positions of new solutions. However, if the WSO fails to produce a solution that surpasses the current best solution in any iteration, the WOA is subsequently employed as an additional stage to generate new candidate solutions. This dual approach aims to ensure the generation of high-quality solutions. The operational details of the WSO, WOA, and the proposed WSO-WOA algorithm are discussed in the following sections.
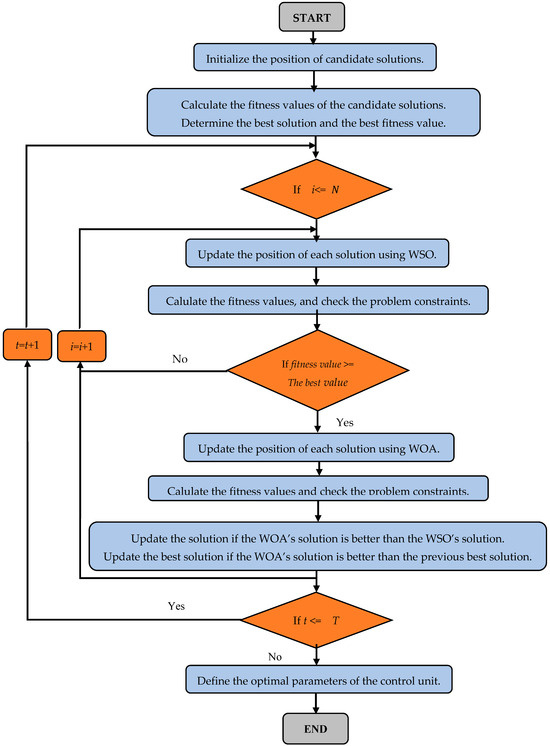
Figure 8.
Flowchart of the proposed WSO-WOA.
5.1. White Shark Optimizer (WSO)
The WSO, created by Braik et al. [34] in 2022 was inspired by the natural behaviors of great white sharks. The optimizer’s mathematical framework is based on the sharks’ exceptional hearing and smelling capabilities, which they use for navigation and hunting. These behaviors are integrated into the algorithm to balance exploration and exploitation, allowing search agents to efficiently investigate different areas of the search space. This approach enhances the optimization process, helping to identify the best possible solutions. The WSO operates through a systematic, iterative process aimed at solving optimization problems efficiently.
Initially, the parameters of the problem and the algorithm are set, followed by the random generation of initial positions and velocities for the population of white sharks. The positions of the sharks are evaluated to establish a baseline for the optimization process. As the algorithm progresses through iterations, the following shark behaviors are utilized to update the shark positions:
- (a)
- A white shark determines the position of its prey by sensing a disruption in the water’s waves, which is caused by the movements of prey. This behavior is known as the speed of movement toward prey. Each shark’s velocity is adjusted based on the difference between its current position and the best-known positions within the swarm. It is guided by random factors to introduce variability, as illustrated in (38).
In the expression , the variable ϵ is determined, with τ denoting the acceleration factor, which is fixed at 4.125. The notation represents the velocity vector associated with the ith white shark in the tth iteration. Furthermore, refers to the best-known position vector for the ith white shark in the swarm. The parameters c1 and c2 are random values that are uniformly distributed within the interval [0, 1]. and are computed (39). The minimum and maximum values for P ( and ) are set at 0.5 and 1.5, respectively.
- (b)
- Sharks then update their positions according to these velocities, with two possible strategies: one that applies when the randomly generated number is less than the sensory intensity factor (), and another when it is greater. This behavior is known as the progression towards the ideal white shark. In this scenario, the behavior of white sharks as they close in on their prey is modelled using the following position-update strategy:
Here, ⊕ denotes the bitwise XOR. The variable f corresponds to the frequency of the white shark’s oscillatory motion, and “rand” denotes a randomly generated number that is uniformly distributed between 0 and 1. The parameter mv is introduced to assess the growing intensity of the white shark’s sensory perception, specifically its hearing and olfactory senses, which become increasingly refined with each iteration. Further elaboration is provided in Braik et al. [34].
- (c)
- Great white sharks are adept at sustaining their location near the most favorable solution in relation to their prey. When the randomly generated number is less than the sensory sensitivity parameter (), each shark’s movement towards the prey is fine-tuned using additional calculations to precisely determine direction and magnitude, as detailed in (41) and (42). These equations mathematically represent the sharks’ behaviors of moving towards the most successful shark in the swarm, as well as their collective fish school dynamics
In (41), denotes the updated position of the ith the relationship between the white shark and its prey. The variables r1, r2, and “rand” are random numbers within the range [0, 1]. The parameter is introduced to reflect the effectiveness of the shark’s sensory abilities, such as smell and sight, when following other sharks near the optimal prey.
As indicated by (42), sharks adjust their positions based on the leading shark approaching the target, refining their position. Ideally, the sharks’ final positions encircle the prey within the search space. The coordinated actions of the sharks within the WSO exemplify collective behavior influenced by their alignment with the leading shark, resulting in improved search efficiency at both local and global levels.
- (d)
- This process is repeated for each shark in the population, ensuring that those that move beyond the predefined boundaries are repositioned. After each iteration, the new positions are evaluated and updated, incrementing the iteration count until the termination condition is met. The algorithm ultimately returns the optimal solution discovered during the iterative process, reflecting the collective intelligence and adaptive behavior of the shark-inspired swarm.
5.2. Whale Optimization Algorithm (WOA)
The WOA was introduced by Mirjalili et al. [35], drawing inspiration from the unique hunting behavior of humpback whales, particularly their bubble net feeding technique. This technique involves creating a series of bubbles in a circular or spiral pattern, resembling the shape of a “9”, to trap prey. This behavior is distinct from that of humpback whales and serves as the foundation for the mathematical model of WOA. Like other meta-heuristic algorithms, WOA begins with the initialization phase, then updates decision variables and constraint checks, and concludes with the evaluation process. The operational mechanism of WOA can be outlined in the following steps:
- (a)
- First, initialize the population of whales Xi (where i = 1, 2…, n).
- (b)
- Calculate the fitness of each search agent to identify the best search agent, denoted as .
- (c)
- Begin the iterative process with the specified maximum number of iterations. For each iteration:
- Update the parameters a, A, C, l, and p for every search agent. The parameter a gradually decreases from 2 to 0 throughout the iterations, affecting both the exploration and exploitation phases. Value b remains constant and determines the shape of the logarithmic spiral. The parameter l is a random value within the range of [−1, 1], while p is a random value between 0 and 1.
Search vector A enables the WOA algorithm to seamlessly shift between exploration and exploitation, as defined in (43). As A decreases, the algorithm allocates certain iterations to exploration when ∣A∣ is greater than or equal to 1 while dedicating the remaining iterations to exploitation when ∣A∣ is less than 1. Vector C is calculated using (44). r is a vector randomly generated in the range 0 and 1.
- The shrinking encircling mechanism and the spiral model are applied to update whales’ positions. If the probability p is less than 0.5 and the magnitude of A is less than 1, update the position of the current search agent according to (45).
If p is less than 0.5 but the magnitude of A is greater than or equal to 1, select a random search agent and update the position of the current search agent by:
If p is greater than or equal to 0.5, update the position of the current search agent by:
and represent the distance between the ith whale and the prey (the best solution found so far) and are determined using (48) and (49), respectively. is calculated using (50).
- After updating the positions, check if any search agent has moved beyond the defined search space and make the necessary adjustments to bring it back within bounds.
- Recalculate the fitness of each search agent and update if a better solution is found.
- Increment the iteration count t and continue the process until the maximum number of iterations is reached.
- Finally, return as the best solution obtained.
5.3. Proposed WSO-WOA in Tuning the Controller Parameters
The operational process of the proposed hybrid scheme is Algorithm 1. In this method, the WSO-WOA algorithm begins by randomly generating an initial population, as outlined in (51). This population comprises N individuals, each characterized by D dimensions. The performance of each individual is evaluated using the cost functions defined in (29). The individual that produces the lowest cost value is identified as the optimal solution.
Until the termination criteria are satisfied, the algorithm continues to update the position of each individual in the population in the following steps:
Step 1: The WSO updating scheme is first applied:
- The behavior of moving toward prey is implemented by adjusting each shark’s velocity, as shown in (38) and (39).
- Subsequently, the movement strategy aimed at the optimal white shark is utilized to revise the individual’s position within the population, as indicated in (40).
- Update the shark’s position by incorporating its behavior of moving toward the most successful shark in the swarm, along with its collective dynamics as a fish school, as described in Equations (41) and (42).
- Check if the solution has moved beyond the defined search.
Step 2: Evaluation Strategy:
- The OF is calculated considering the new solution obtained by the WSO.
- The problem constraints are checked, and if the solution does not meet these constraints, it will be penalized with a high additional cost.
Step 3: Update if the new solution gives better fitness value the previous best fitness value (OFbest) and proceed to Step 8.
Step 4: If the new solution generated by the WSO fails to improve upon the best solution from the previous iteration, the WOA updating scheme is then applied:
- Update the position of the new solution using (43)–(50).
Step 5: Apply the evaluation strategy explained in Step 2 considering WOA’s solution.
Step 6: Update the solution if the WOA’s solution is better than the WSO’s solution.
Step 7: Update if a better solution is found.
Step 8: Go to the next solution and continue until the last solution is reached.
Step 9: Increment the iteration count t and persist with the procedure until the maximum number of iterations is achieved.
| Algorithm 1: Pseudo-code of WSO-WOA. |
|
|
|
6. Results and Discussion
6.1. Testing the Accuracy of the WSO-WOA Algorithm
The WSO-WOA algorithm was utilized to fine-tune the parameters of two control schemes—PI-PI and FOPI-FOPI—with the goal of enhancing the performance of the DSTATCOM, thereby improving the overall functionality of the MG system depicted in Figure 1. The system data are provided in Table 2. The performance of the WSO-WOA optimizer was compared against several other optimizers, including WSO, WOA, the Sine Cosine Algorithm (SCA) [36], and the Grey Wolf Optimizer (GWO) [37]. The five optimizers were tested under the scenarios presented in Table 3. The population size used in the optimization run was 20, and the maximum number of iterations was 50.
Table 3.
Tested scenarios of the considered optimization algorithms.
6.1.1. Cascading PI-PI Controller
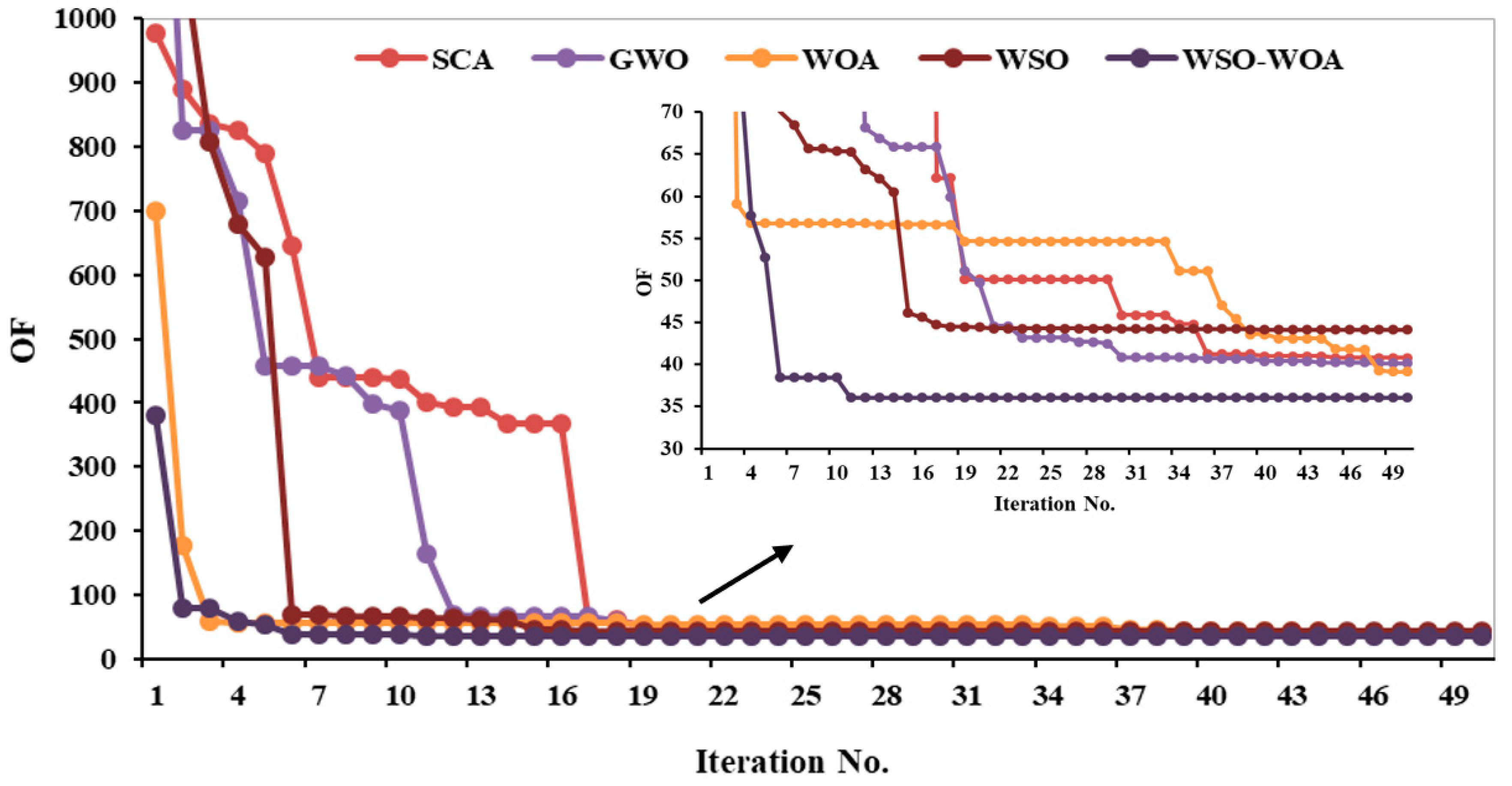
This study employed the PI-PI controller with 16 decision-making variables, as shown in Table 4. These variables are crucial in determining the controller’s performance, as they directly influence the system’s response to dynamic changes. Figure 9 visually compares the convergence curves for five optimization algorithms: WSO-WOA, WSO, WOA, SCA, and GWO. Convergence curves are essential for evaluating the effectiveness of optimization algorithms, as they depict how quickly and efficiently an algorithm can reach the optimal solution. The curves shown in Figure 9 represent the best performance achieved by each algorithm over ten independent runs, highlighting the consistency and robustness of the optimization process.
Table 4.
The optimal parameters of the considered algorithms for tuning the PI-PI controller.
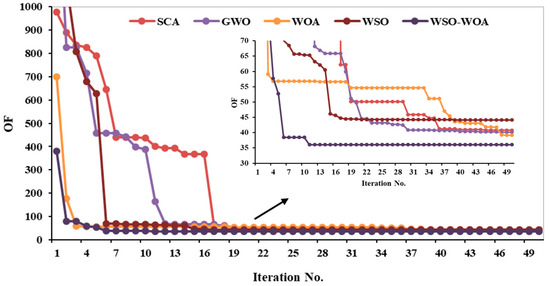
Figure 9.
Comparison of the convergence curves of the proposed WSO-WOA with other algorithms in tuning the cascading PI-PI controller.
Each of these simulations was run for 50 iterations, allowing enough time for the algorithms to explore the solution space and converge on an optimal set of parameters. The results of these simulations provide valuable insights into the efficiency and reliability of each algorithm in fine-tuning the PI-PI controller. Table 4 summarizes the optimal parameters derived from each optimizer. These parameters are the key outputs of the optimization process and enhance the performance of the PI-PI controller. By comparing these parameters, one can assess each optimization technique’s relative strengths and weaknesses in the context of the specific application.
Table 4 reveals that the proposed WSO-WOA algorithm delivered the most optimal solution among the algorithms tested. The best OF value obtained by WSO-WOA was 36.052 p.u., a significant achievement demonstrating the algorithm’s effectiveness in fine-tuning the controller parameters. This superior performance underscores the WSO-WOA’s ability to efficiently navigate the solution space, avoiding local minima and converging on a highly effective solution.
The WOA algorithm emerged as the second-best performer, achieving the best fitness value of 39.149 p.u. While it approached the WSO-WOA’s performance, the WOA still lagged behind, highlighting the subtle yet impactful differences in how these algorithms explore and exploit the search space.
In contrast, the WSO algorithm showed the weakest performance, with its best fitness value recorded at 44.14 p.u. This represents a 14.1% increase over the result obtained by WSO-WOA, indicating a significant disparity in their optimization capabilities. This poorer performance suggests that WSO may struggle with more complex or multidimensional optimization problems, where more advanced hybrid algorithms like WSO-WOA can excel.
Similarly, the GWO and SCA algorithms demonstrated less optimal performance than WSO-WOA, with increased fitness values of approximately 11.3% and 13.2%, respectively. Although both algorithms showed some promise, their results indicate a relative difficulty in achieving the same level of precision and optimization as the WSO-WOA. The WOA, however, had a comparatively smaller increase of 7.29%, making it the closest contender to WSO-WOA but still not matching its superior performance. Table 4 also highlights a trade-off associated with the WSO-WOA algorithm: it required more time to converge to the optimal solution. The WSO-WOA took approximately 5.3 h to reach the best result, which is 1.97 times the time needed by the WSO, 1.83 times the time needed by the WOA, and 2.12 times the time needed by the SCA. This extended convergence time suggests that WSO-WOA is more accurate and demands greater computational resources. This trade-off between time and performance is crucial when selecting an optimization algorithm, particularly in real-time or resource-constrained applications. Nonetheless, the superior optimization results achieved by WSO-WOA may justify the additional computational time required.
6.1.2. Cascading FOPI-FOPI Controller
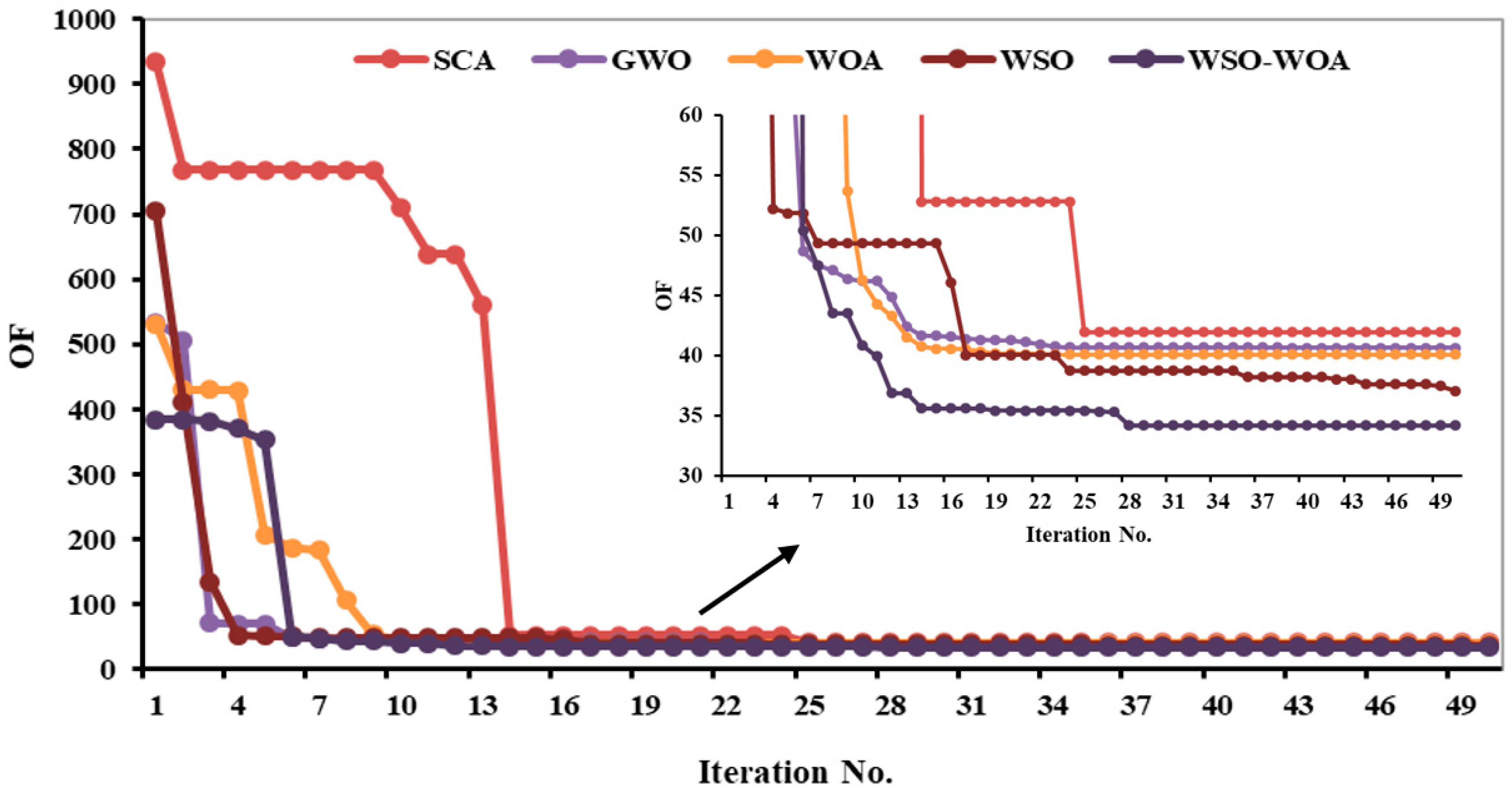
Figure 10 illustrates the convergence curves of the various algorithms used in this study. In the case of the FOPI-FOPI controller, the optimization process was more complex due to the increased number of decision-making variables, totaling 24. These variables are crucial in fine-tuning the controller’s response to various system dynamics, making the optimization task more challenging. The algorithms were systematically applied to this problem, with each algorithm being executed ten times to ensure the reliability and consistency of the results. Each run consisted of 50 iterations. Table 5 provides a clear comparison of the performance of various optimization algorithms in tuning the FOPI-FOPI, with the WSO-WOA algorithm emerging as the top performer. The WSO-WOA achieved the best OF value of 34.15 p.u., a result that underscores its effectiveness in fine-tuning controller parameters. Following closely was the WSO algorithm, which secured a best fitness value of 37.054 p.u. Although this result is competitive, it still falls short of the WSO-WOA, reflecting the nuanced differences in how these algorithms navigate the search space. On the other end of the spectrum, the SCA algorithm recorded the weakest performance with a best fitness value of 41.39 p.u., which is a 21.2% increase over WSO-WOA’s result. This disparity suggests that the WSO algorithm may struggle with more complex or multidimensional optimization tasks, whereas hybrid algorithms like WSO-WOA can excel better.
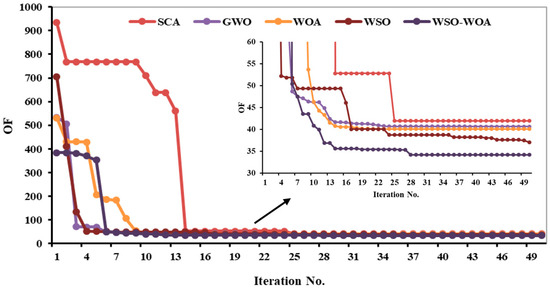
Figure 10.
Comparison of the convergence curves of the proposed WSO-WOA with other algorithms used in tuning the cascading FOPI-FOPI controller.
Table 5.
The optimal parameters of the considered algorithms for tuning the FOPI-FOPI controller.
Similarly, the GWO and WOA algorithms also lagged behind WSO-WOA, showing fitness value increases of approximately 19% and 17.3%, respectively. The WSO algorithm, with a comparatively smaller increase of 8.5%, was the closest competitor but still did not match the superior performance of WSO-WOA. Table 5 indicates that the WSO-WOA algorithm required approximately 5.7 h to achieve its best result, a duration that is 1.84 times longer than that of the WSO algorithm, 1.68 times longer than the WOA, 1.81 times longer than the GWO, and 2.04 times longer than the SCA. This extended convergence time highlights a key trade-off. While the WSO-WOA algorithm delivers superior accuracy and optimization performance, it does so at the cost of increased computational resources and time. However, the offline tuning process mitigates this drawback. In offline optimization scenarios, the emphasis is on achieving the highest possible accuracy and optimal solutions rather than minimizing computational time. As a result, the longer convergence time of the WSO-WOA can be considered acceptable, especially when the ultimate goal is to enhance the system’s performance and stability. Moreover, the additional time invested in the tuning process is often justified by the substantial improvements in power quality and controller performance that the WSO-WOA algorithm provides. By efficiently navigating the solution space and avoiding local minima, the WSO-WOA ensures that the final solution is accurate and robust, making it a valuable tool for complex optimization problems where precision is paramount. Thus, while the increased computational demand may seem like a limitation, it is outweighed by the significant benefits in terms of enhanced system performance and reliability.
6.2. Comparative Analysis of FOPI-FOPI and PI-PI Controllers
6.2.1. Stability Analysis Using Bode Plots
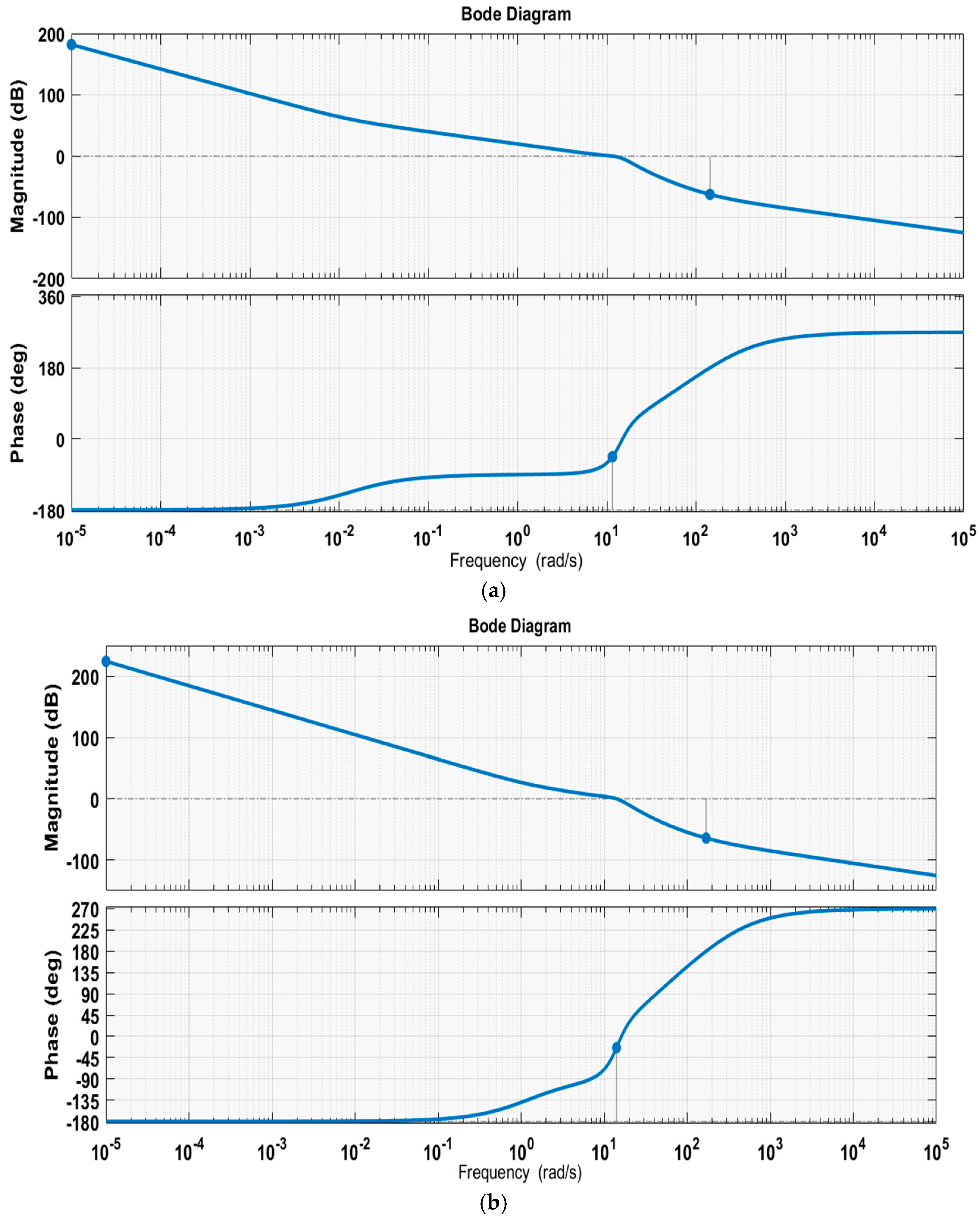
The stability of the system is evaluated through Bode plot analysis, focusing on key performance indicators such as phase margin and gain margin, which directly influence the dynamic performance of the DSTATCOM. The small dynamic model is presented in Appendix A [38].
The Bode plot of the PI-PI controller, shown in Figure 11a, provides insights into the stability margins of the control loop. The PI-PI controller exhibits a phase margin of 135.15°, which indicates moderate stability. The gain margin is approximately 61 dB, ensuring that the system can tolerate a certain level of gain increase without becoming unstable. The Bode plot analysis confirms that the PI-PI controller provides reasonable stability and performance for DSTATCOM control.
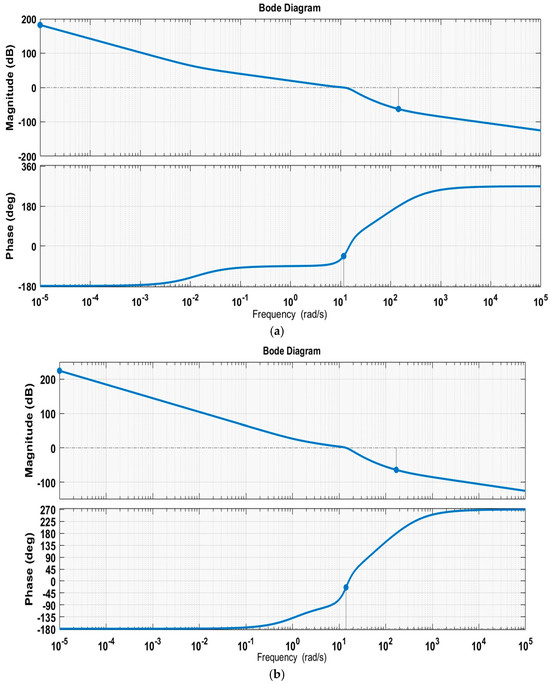
Figure 11.
The system frequency response: (a) with PI-PI controller; (b) with FOPI-FOPI controller.
The open-loop Bode plot of the DSTATCOM system, when controlled by the fractional-order cascaded FOPI-FOPI controller, is presented in Figure 11b. The FOPI-FOPI controller achieves a phase margin of 155.88°, which indicates a more stable and robust system compared to the PI-PI controller. A higher phase margin suggests better performance during transient conditions, with less oscillatory behavior.
The gain margin for the FOPI-FOPI controller is found to be 64 dB, which provides a greater tolerance for system gain variation without risking instability. The results from the Bode plot demonstrate that the FOPI-FOPI controller offers superior stability margins and overall better performance compared to the traditional PI-PI controller.
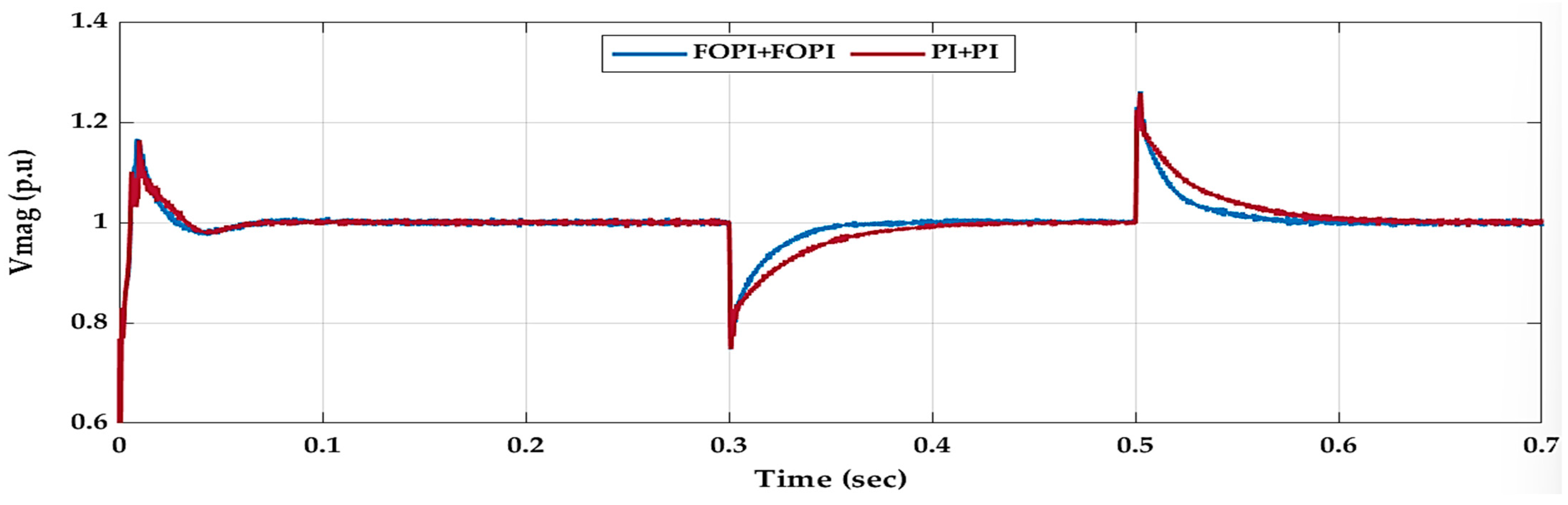
6.2.2. Case 1: Performance Evaluation under Balanced Three-Phase Sag
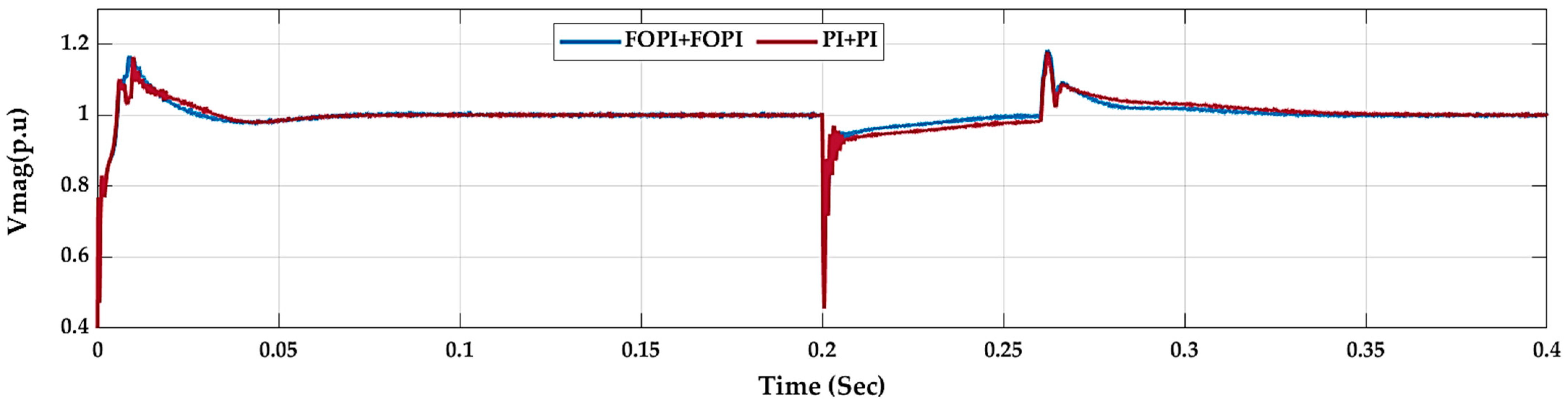
Balanced three-phase voltage sags are typically triggered by events such as short circuits, the start-up of large motors, or sudden spikes in EV charging demand. Figure 12 illustrates the performance of the PI-PI controller and the FOPI-FOPI controller optimized using the WSO-WOA algorithm. Between 0.3 and 0.5 s, the microgrid experiences a sharp increase in charging demand, leading to a significant voltage drop. The load demand then returns to normal conditions at 0.5 s. The figure clearly demonstrates the superiority of the FOPI-FOPI controller over the PI-PI controller in regulating voltage magnitude. The control performance assessment, as summarized in Table 6, reveals notable differences between the PI-PI and FOPI-FOPI controllers. The FOPI-FOPI controller consistently achieved shorter settling times, with the quickest being 0.075 s compared to the PI-PI controller’s best time of 0.145 s. In terms of maximum overshoot, both controllers exhibited similar performance, with the PI-PI controller recording a maximum overshoot of 25.85%, while the FOPI-FOPI controller had a marginally higher maximum overshoot of 25.89%.
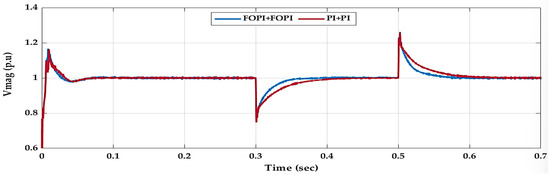
Figure 12.
Regulation of the load voltage at B4 under a three-phase balanced sag.
Table 6.
Control performance assessment.
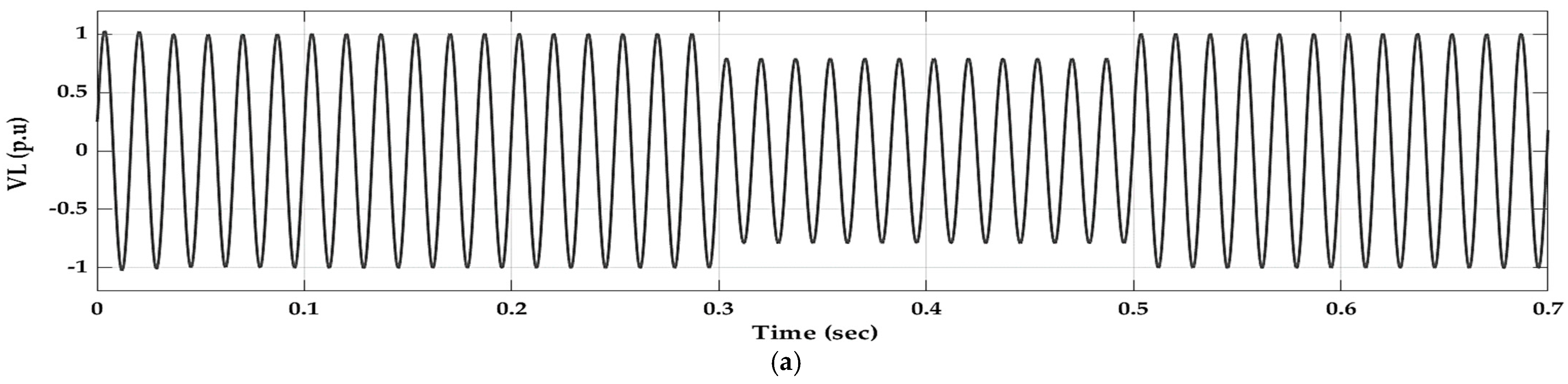
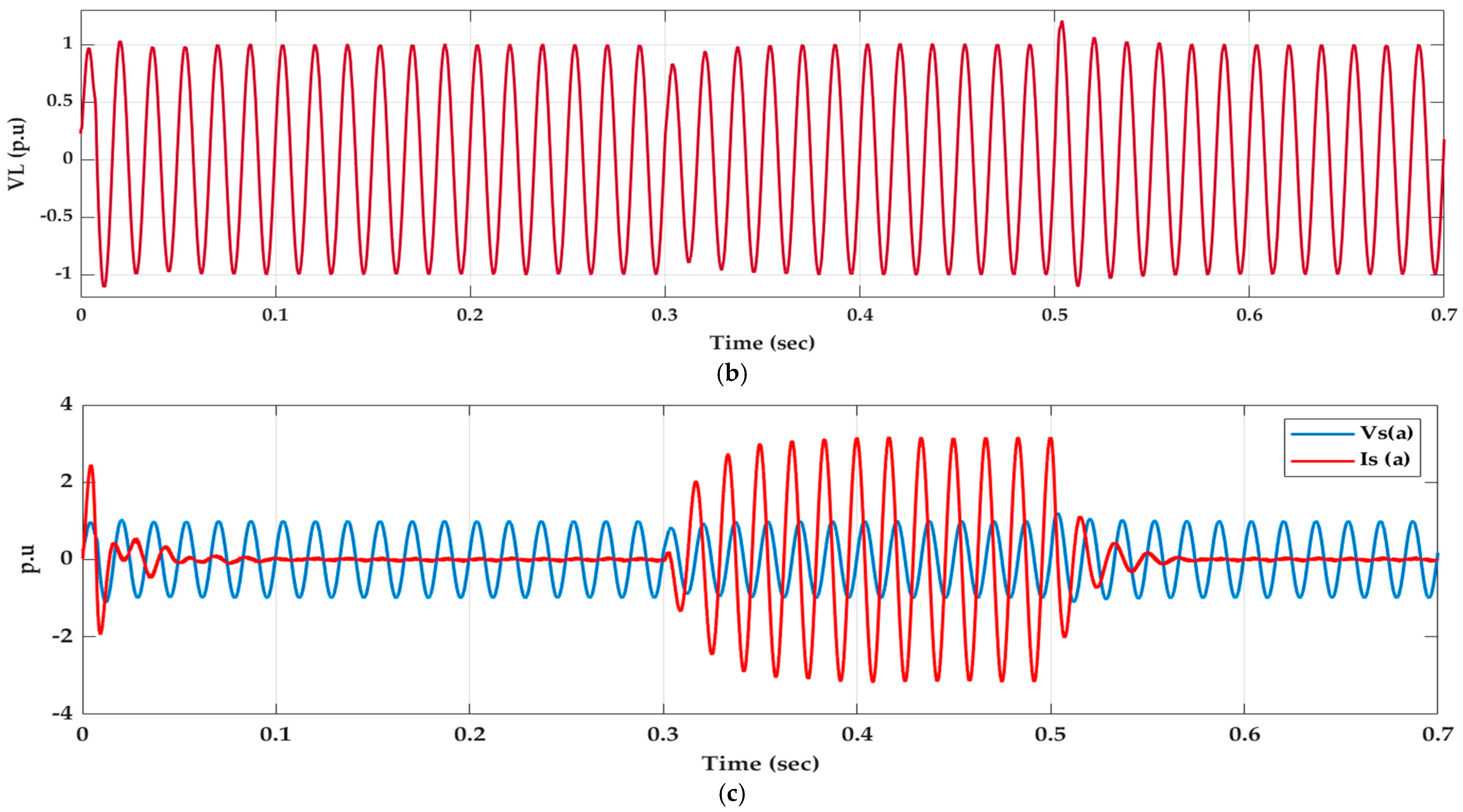
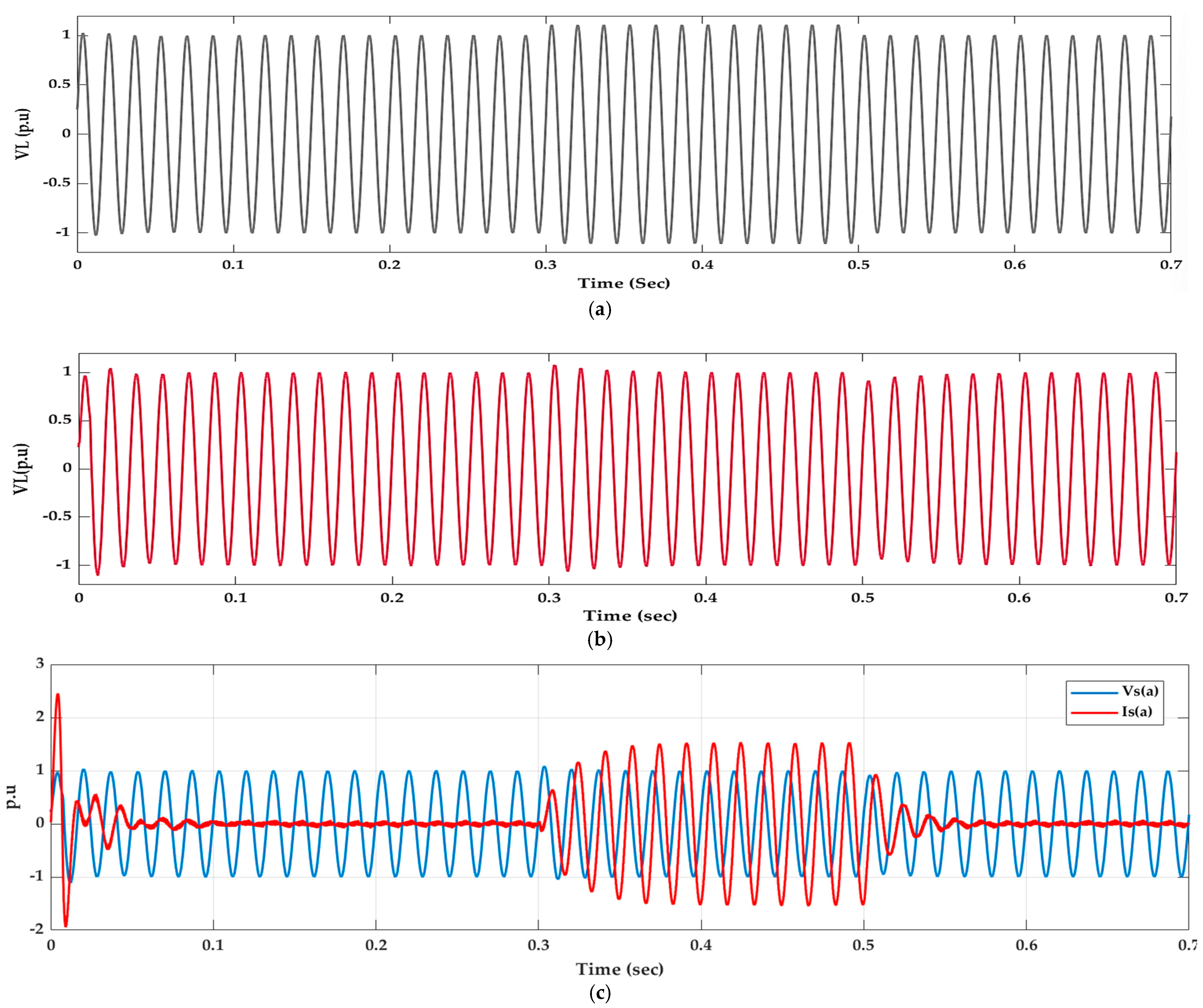
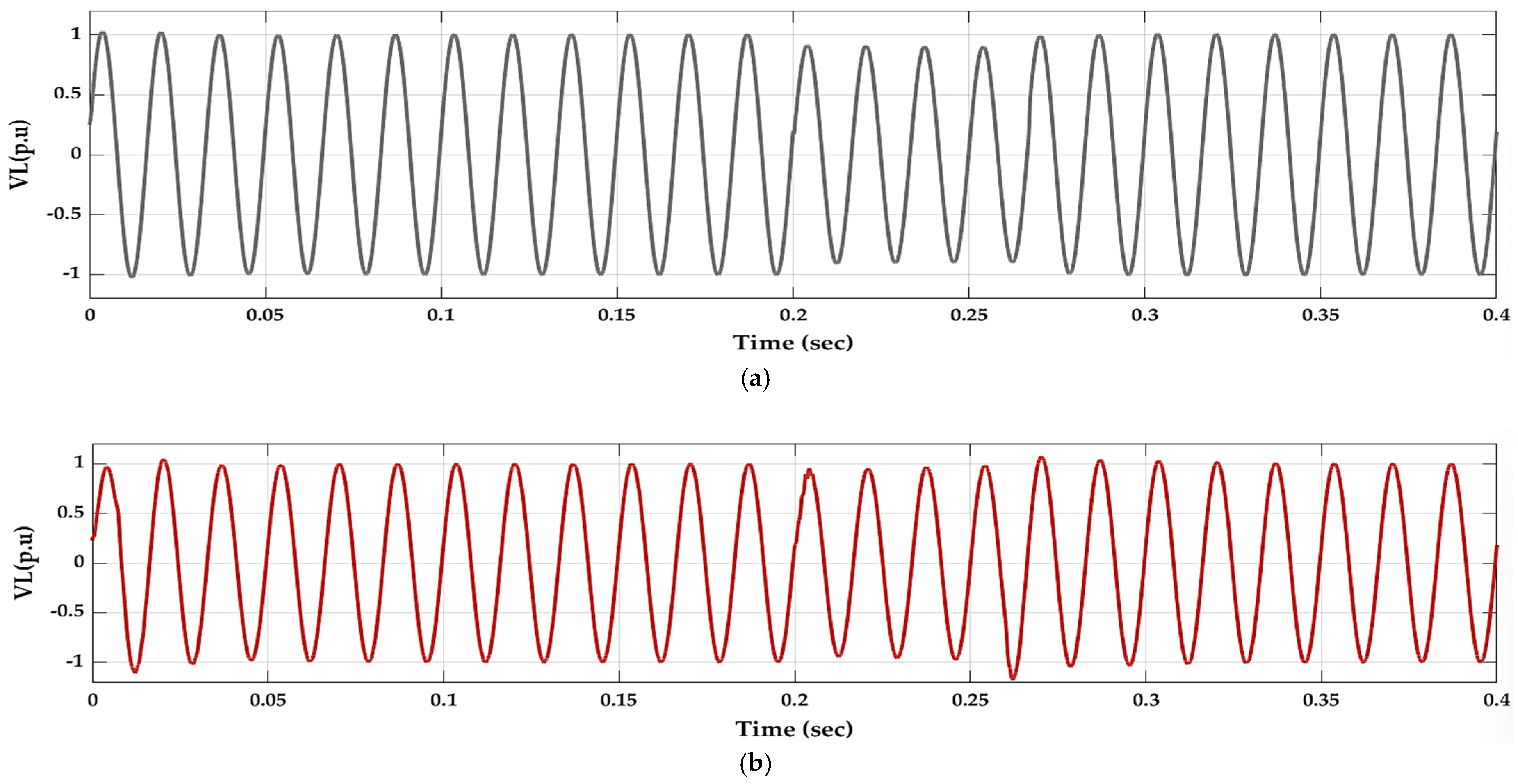
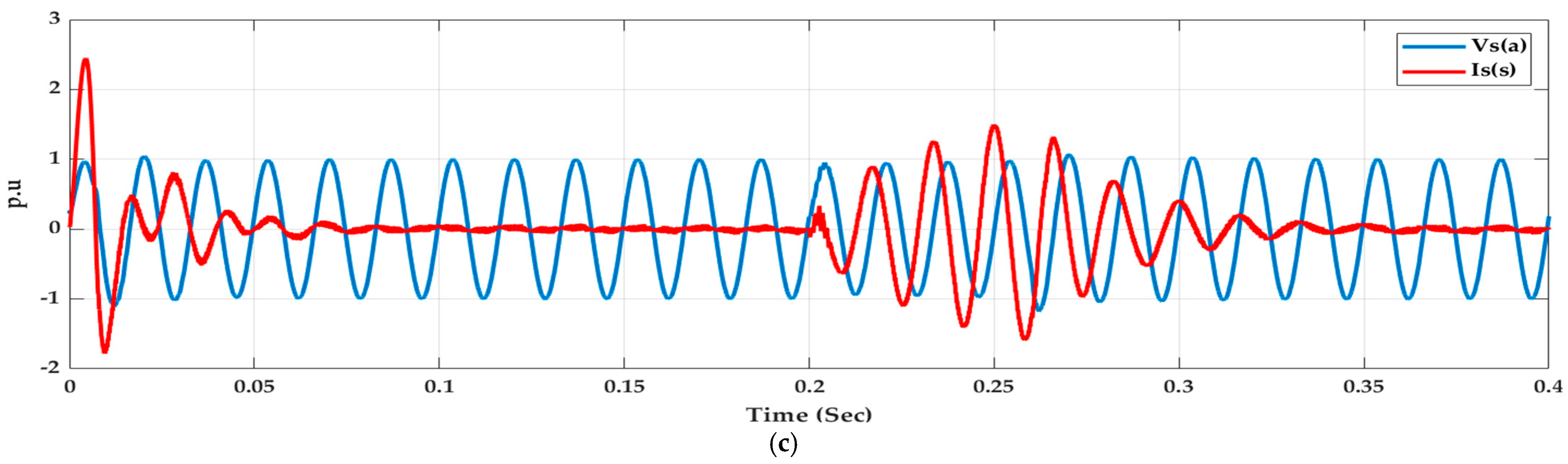
Figure 13 illustrates the improvement in load voltage at bus B4 after applying the DSTATCOM with the FOPI-FOPI controller. In Figure 13a, the load voltage at phase (a) is shown with no enhancement, while Figure 13b displays the voltage after enhancement. Figure 13c depicts the injected signal using the controller.
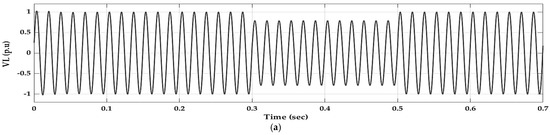
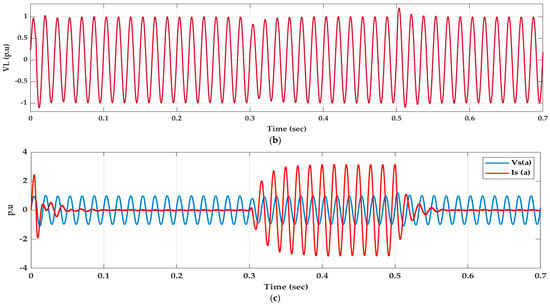
Figure 13.
The outcomes of the sag scenario of phase (a) using the DSTATCON using the FOPI-FOPI: (a) the load voltage without enhancement, (b) the load voltage with enhancement, and (c) the injected voltage and current.
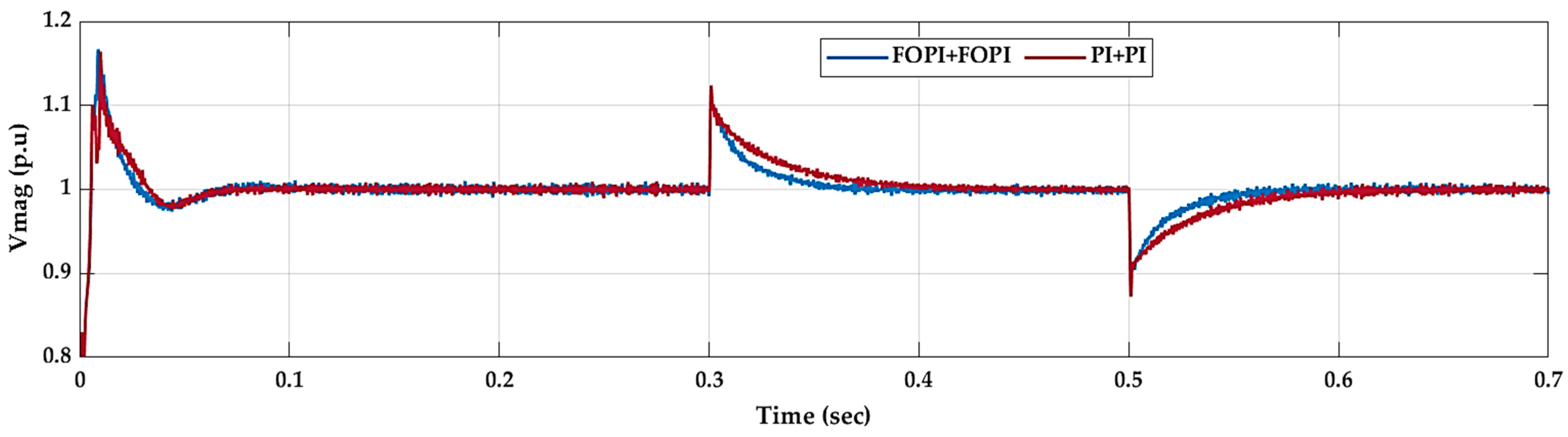
6.2.3. Case 2: Performance Evaluation under Balanced Three-Phase Swell
Balanced three-phase voltage swells are temporary increases in the voltage level of an electrical power system, typically lasting from a few milliseconds to several seconds due to the sudden decrease in the charging demand of EV charging stations. Figure 14 compares the performance of the PI-PI controller with the FOPI-FOPI controller, both optimized using the WSO-WOA algorithm. During a period between 0.3 and 0.5 s, the microgrid encounters a rapid decrease in charging demand, resulting in a pronounced voltage rise. By 0.5 s, the load demand normalizes. The figure highlights the clear advantage of the FOPI-FOPI controller in maintaining voltage stability.
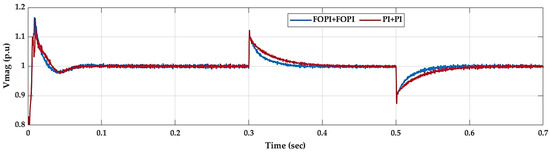
Figure 14.
Regulation of the load voltage at B4 under three-phase balanced swell.
The results in Table 6 highlight the performance differences between the PI-PI and FOPI-FOPI controllers. The FOPI-FOPI controller achieved a significantly shorter settling time of 0.068 s, compared to the PI-PI controller’s 0.155 s. This suggests that the FOPI-FOPI controller is more effective at achieving a rapid response. However, both controllers exhibited similar levels of maximum overshoot at 12.35%. Figure 15 provides a detailed view of the improvement in load voltage at bus B4 following the implementation of the DSTATCOM with the FOPI-FOPI controller.
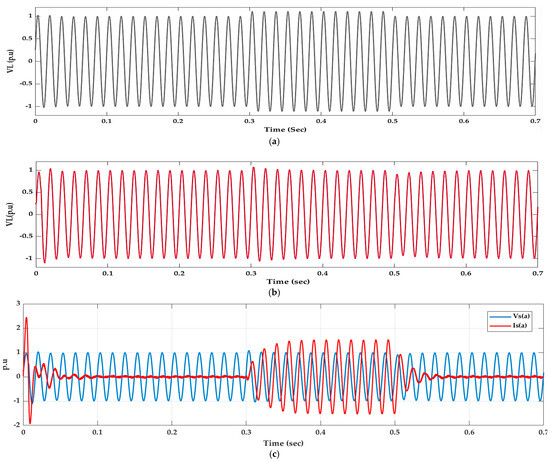
Figure 15.
The outcomes of the swell scenario of phase (a) using the DSTATCON using the FOPI-FOPI: (a) the load voltage without enhancement, (b) the load voltage with enhancement, and (c) the injected voltage and current.
6.2.4. Case 3: Performance Evaluation under Balanced Three-Phase-to-Ground Fault
This test introduced a three-phase-to-ground fault at the parallel linear load at bus B4, occurring between 0.2 s and 0.25 s. Figure 16 illustrates the performance of both the FOPI-FOPI and PI-PI controllers during this fault condition. In this case, both controllers exhibited competitive performance metrics. As shown in Table 6, the FOPI-FOPI controller achieved a settling time ranging from 0.05 to 0.073 s, demonstrating superior responsiveness compared to the PI-PI controller, which had a settling time of no less than 0.105 s. Despite this advantage, the maximum overshoot was slightly higher for the FOPI-FOPI controller at 18.19%, compared to the PI-PI controller’s 18.1%. This indicates that while the FOPI-FOPI controller excels in achieving rapid settling times, it may require further refinement to optimize stability without increasing overshoot. Overall, the results underscore the FOPI-FOPI controller’s potential for improved performance in dynamic applications.
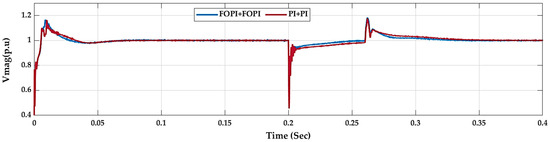
Figure 16.
Regulation of the load voltage at B4 under three-phase-to-ground fault.
Moreover, Figure 17 demonstrates the significant improvement in voltage regulation for phase (a) when the DSTATCOM, controlled by the FOPI-FOPI controller, is employed. The enhanced stability and quicker response underscore the FOPI-FOPI controller’s advantage in maintaining system reliability and performance under fault conditions.
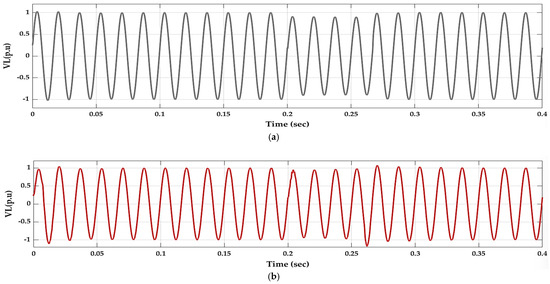
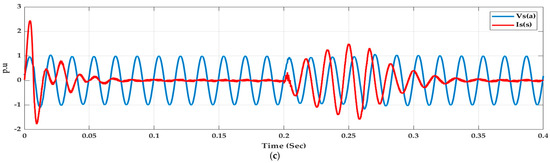
Figure 17.
The outcomes of the fault scenario are (a) using the DSTATCON and using the FOPI-FOPI: (a) the load voltage without enhancement, (b) the load voltage with enhancement, and (c) the injected voltage and current.
6.3. Discussion
This paper evaluates two distinct cascading controllers within a hybrid microgrid setting, namely the PI-PI controller and the FOPI-FOPI controller. The key unique features and advantages of the proposed approaches are:
- Integration of Advanced Controller Types:
- ○
- PI-PI Controller: A well-established controller that effectively regulates voltage and current within the hybrid microgrid.
- ○
- FOPI-FOPI Controller: Introduces fractional-order control, providing enhanced responsiveness and performance in dynamic conditions, thereby improving system stability.
- Innovative Hybrid Optimization Algorithm (WSO-WOA):
- ○
- The novel WSO-WOA algorithm was created specifically to optimize controller parameters efficiently across various operational scenarios, including significant power quality disturbances.
- ○
- Extensive comparisons against other optimization techniques—WSO, WOA, GWO, and SCA—demonstrated the superior efficacy of WSO-WOA in achieving optimal solutions.
- Improved Accuracy in Controller Tuning:
The WSO-WOA algorithm achieved a tuning accuracy improvement of approximately 7.29% to 14.1% for the PI-PI controller and 8.5% to 21.2% for the FOPI-FOPI controller compared to other algorithms. This substantial enhancement underscores the algorithm’s capability to fine-tune controllers for optimal performance.
- 4.
- Effectiveness Under Disturbances:
This study rigorously assessed the controllers’ effectiveness under various power quality disturbances, such as three-phase balanced voltage swells, sags, and three-phase-to-ground faults. The results highlighted the FOPI-FOPI controller’s capability to significantly reduce settling time by 30.5% to 56.1%, indicating its efficiency in stabilizing the regulated signal quickly, which is crucial for dynamic operations.
- 5.
- Consideration of Convergence Time:
Although the WSO-WOA algorithm required 1.68 to 2.12 times longer to converge to an optimal solution compared to other methods, it is essential to recognize that this extended time is associated with offline optimization. The optimization process occurs before deployment, ensuring that the real-time operation of the system remains unaffected. This aspect emphasizes the algorithm’s suitability for offline tasks where accuracy is prioritized over speed.
- 6.
- Real-World Application in Hybrid Microgrids:
The integration of a PV system and PEMFC to supply power to EV charging stations significantly impacts the overall power quality of the microgrid. The proposed controllers, optimized by the WSO-WOA algorithm, contribute to maintaining robust power quality amid varying operational demands.
7. Conclusions
This paper comprehensively evaluates two cascading controllers, the PI-PI controller and the FOPI-FOPI controller, which enhance the performance of DSTATCOMs integrated into a hybrid microgrid. A novel hybrid algorithm, WSO-WOA, was developed to optimize controller parameters across various scenarios. This hybrid microgrid features a combination of a PV system and a PEMFC, which supplies power to EV charging stations—factors that significantly impact the overall power quality of the microgrid.
The proposed WSO-WOA algorithm’s performance was rigorously compared against other optimization techniques, including WSO, WOA, GWO, and SCA. Various case studies were conducted to assess the effectiveness of these controllers under different power quality disturbances, such as three-phase balanced voltage swells, sags, and three-phase-to-ground faults.
The results obtained from this study confirmed the superiority of the WSO-WOA algorithm in achieving optimal solutions compared to other optimization algorithms. Specifically, the WSO-WOA algorithm demonstrated a notable improvement in accuracy, surpassing the other algorithms by approximately 7.29% to 14.1% in the tuning of the PI-PI controller. Furthermore, when applied to the FOPI-FOPI controller, the WSO-WOA algorithm outperformed the other methods by about 8.5% to 21.2%. This significant performance enhancement highlights the WSO-WOA algorithm’s effectiveness in fine-tuning both PI-PI and FOPI-FOPI controllers, showcasing its superior capability in optimizing controller parameters for improved system stability and performance. The results revealed a notable trade-off associated with the WSO-WOA algorithm: it required more time to converge to the optimal solution than the other algorithms. Specifically, the WSO-WOA algorithm took approximately 1.68 to 2.12 times longer to reach convergence than its counterparts. This extended convergence time is critical, particularly in scenarios where real-time or near-real-time optimization is crucial.
However, it is important to note that the tuning process in this context is offline optimization. This means that the extended computation time does not impact the system’s real-time operation, as the optimization is performed in advance and applied to the system’s configuration before deployment. Consequently, while the WSO-WOA algorithm may exhibit slower convergence, its superior accuracy and effectiveness in finding optimal solutions make it valuable for offline optimization tasks where precision outweighs the need for rapid convergence. The performance of the FOPI-FOPI and PI-PI controllers was evaluated across various case studies to assess their effectiveness under different operating conditions. The results demonstrated a significant improvement in the settling time of the regulated signal for the FOPI-FOPI controller compared to the PI-PI controller. The FOPI-FOPI controller reduced the settling time by about 30.5–56.1%. This improvement highlights the superior efficiency of the FOPI-FOPI controller in quickly stabilizing the regulated signal, which is crucial for maintaining optimal performance in dynamic environments.
Author Contributions
The problem under investigation was designed by M.M.R. and S.H.E.A.A. Simulations were conducted and results were obtained by A.M.A. and Z.M.A. The analysis of these results was carried out by S.Z.A. and M.M.R. The manuscript was written by S.H.E.A.A. and A.M.A. and subsequently reviewed by M.M.R., S.Z.A. and Z.M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Prince Sattam bin Abdulaziz University grant number PSAU/2024/01/29483.
Data Availability Statement
Data are available on request from the authors.
Acknowledgments
The authors extend their appreciation to Prince Sattam bin Abdulaziz University for funding this research work through the project number PSAU/2024/01/29483.
Conflicts of Interest
The authors declare no conflicts of interest.
Nomenclature
| Abbreviations | |
| CVSI | Centralized voltage source inverter |
| DSTATCOMs | Distribution static synchronous compensators |
| FLC | Fuzzy logic controller |
| FC | Fuel cell |
| FOPI-FOPI | Cascading Fractional-Order Proportional–Integral |
| ITSE | The integral of time-weighted square error |
| MPC | Model predictive control |
| MPPT | Maximum power point tracking |
| NN | Neural network |
| PI-PI | Cascading Proportional–Integral Controller |
| PEMFC | Proton exchange membrane fuel cell |
| PQ | Power quality |
| PV | Photovoltaic |
| WSO | White Shark Optimization |
| WOA | Whale Optimization Algorithm |
| WSO-WOA | The hybrid algorithm of WSO and WOA |
| Symbols | |
| C1, C2, C3, and C4 | The loop control units of the DSTATCOM |
| DC link capacitor of the CVSI | |
| The output current and voltage of the PV module | |
| , , | The output current, voltage, and power of the FC system, respectively |
| , | The CVSI’s d- and q-axes output voltage components |
| , | The reference signals of CVSI’s d- and q-axis output voltage components |
| , | The d- and q-axes voltage components at B1 |
| , | The d- and q-axes voltage components at B2 |
| , , | Resistance, inductance, and capacitance of the CVSI’s output filter, respectively. |
| , | Resistance, and inductance of the transformer connected between bus B1 and B2 |
| , | The CVSI’s d- and q-axes output current components |
| , | The reference d- and q-axes current components at bus B2 |
| ω | The microgrid frequency in rad/sec |
| , | The DSTATCOM’s d- and q-axes output current components |
| , | The reference d- and q-axes of the DSTATCOM’s current components at bus B2 |
| , | The DSTATCOM’s d- and q-axes output voltage components |
| , | The reference signals of DSTATCOM’s d- and q-axes output voltage components |
| , | Resistance, and inductance of the DSTATCOM’s output filter, respectively |
| , | The DSTATCOM’s active and reactive powers |
| The reference DC link voltage of the DSTATCOM and the CVSI, respectively. | |
| , | The control parameters of the cascading control units C1, C2, C3, and C4 |
| , | Lower and upper bounds of the PI-PI and FOPI-FOPI controllers. |
| N, Tmax | The population size and the maximum number of iterations used in the optimization run |
| The global best solution in iteration t | |
| OFbest | The best fitness value |
Appendix A
The small-signal dynamics of the system are obtained by linearizing (14) around the steady-state operating point. The resulting simplified small-signal model in the Laplace domain is presented as [38]:
where
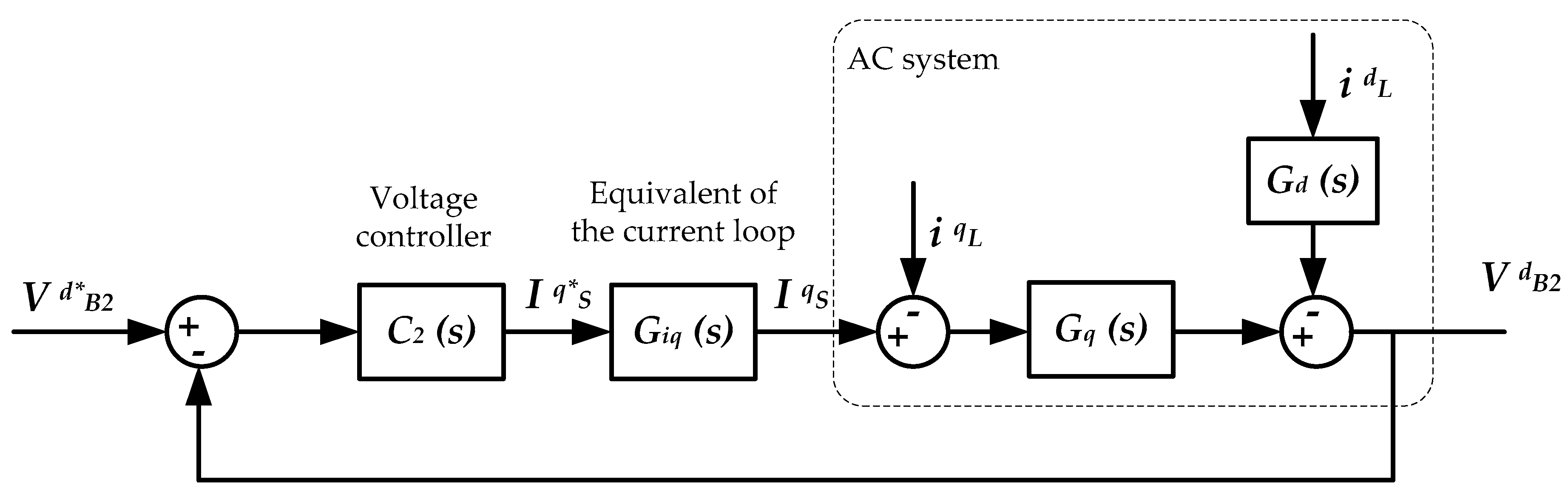
The simplified control block diagram of the D-STATCOM PCC voltage is presented in Figure A1, where is given by:
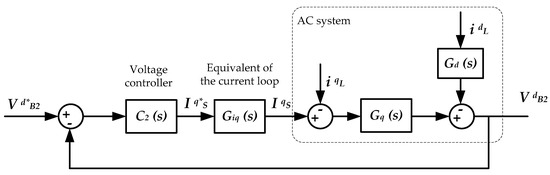
Figure A1.
Simplified control block diagram of the DSTATCOM.
Figure A1.
Simplified control block diagram of the DSTATCOM.
References
- Trujillo, D.; Torres, E.M.G. Demand Response Due to the Penetration of Electric Vehicles in a Microgrid through Stochastic Optimization. IEEE Lat. Am. Trans. 2022, 20, 651–658. [Google Scholar]
- Vosoogh, M.; Rashidinejad, M.; Abdollahi, A.; Ghaseminezhad, M. An Intelligent Day Ahead Energy Management Framework for Networked Microgrids Considering High Penetration of Electric Vehicles. IEEE Trans. Ind. Inform. 2020, 17, 667–677. [Google Scholar]
- Daud, W.R.W.; Rosli, R.E.; Majlan, E.H.; Hamid, S.A.A.; Mohamed, R.; Husaini, T. PEM Fuel Cell System Control: A Review. Renew. Energy 2017, 113, 620–638. [Google Scholar] [CrossRef]
- Bader, S.; Ma, X.; Oelmann, B. One-Diode Photovoltaic Model Parameters at Indoor Illumination Levels—A Comparison. Sol. Energy 2019, 180, 707–716. [Google Scholar] [CrossRef]
- Cagnano, A.; De Tuglie, E.; Mancarella, P. Microgrids: Overview and Guidelines for Practical Implementations and Operation. Appl. Energy 2020, 258, 114039. [Google Scholar]
- Uddin, M.; Mo, H.; Dong, D.; Elsawah, S.; Zhu, J.; Guerrero, J.M. Microgrids: A Review, Outstanding Issues and Future Trends. Energy Strateg. Rev. 2023, 49, 101127. [Google Scholar]
- Saeed, M.H.; Fangzong, W.; Kalwar, B.A.; Iqbal, S. A Review on Microgrids’ Challenges Perspectives. IEEE Access 2021, 9, 166502–166517. [Google Scholar] [CrossRef]
- Sepasi, S.; Talichet, C.; Pramanik, A.S. Power Quality in Microgrids: A Critical Review of Fundamentals, Standards, and Case Studies. IEEE Access 2023, 11, 108493–108531. [Google Scholar] [CrossRef]
- Jadeja, R.; Bizon, N.; Trivedi, T.; Ved, A.; Chudasama, M. Power Quality Issues and Mitigation Techniques in Microgrid. In Microgrid Architectures, Control and Protection Methods; Springer: Berlin/Heidelberg, Germany, 2020; pp. 719–748. [Google Scholar]
- Micallef, A. Review of the Current Challenges and Methods to Mitigate Power Quality Issues in Single-phase Microgrids. IET Gener. Transm. Distrib. 2019, 13, 2044–2054. [Google Scholar]
- Liang, X. Emerging Power Quality Challenges Due to Integration of Renewable Energy Sources. IEEE Trans. Ind. Appl. 2016, 53, 855–866. [Google Scholar]
- Kumar, D.; Zare, F. A Comprehensive Review of Maritime Microgrids: System Architectures, Energy Efficiency, Power Quality, and Regulations. IEEE Access 2019, 7, 67249–67277. [Google Scholar]
- Hernández-Mayoral, E.; Madrigal-Martínez, M.; Mina-Antonio, J.D.; Iracheta-Cortez, R.; Enríquez-Santiago, J.A.; Rodríguez-Rivera, O.; Martínez-Reyes, G.; Mendoza-Santos, E. A Comprehensive Review on Power-Quality Issues, Optimization Techniques, and Control Strategies of Microgrid Based on Renewable Energy Sources. Sustainability 2023, 15, 9847. [Google Scholar] [CrossRef]
- Barghi Latran, M.; Teke, A.; Yoldaş, Y. Mitigation of Power Quality Problems Using Distribution Static Synchronous Compensator: A Comprehensive Review. IET Power Electron. 2015, 8, 1312–1328. [Google Scholar]
- Govil, V.K.; Sahay, K.; Tripathi, S.M. Enhancing Power Quality through DSTATCOM: A Comprehensive Review and Real-Time Simulation Insights. Electr. Eng. 2024, 1–30. [Google Scholar]
- Pandu, S.B.; Sundarabalan, C.K.; Srinath, N.S.; Krishnan, T.S.; Priya, G.S.; Balasundar, C.; Sharma, J.; Soundarya, G.; Siano, P.; Alhelou, H.H. Power Quality Enhancement in Sensitive Local Distribution Grid Using Interval Type-II Fuzzy Logic Controlled DSTATCOM. IEEE Access 2021, 9, 59888–59899. [Google Scholar] [CrossRef]
- Mangaraj, M.; Panda, A.K. DSTATCOM Deploying CGBP Based Icos ϕ Neural Network Technique for Power Conditioning. Ain Shams Eng. J. 2018, 9, 1535–1546. [Google Scholar] [CrossRef]
- Ahmad, M.T.; Kumar, N.; Singh, B. Generalised Neural Network-Based Control Algorithm for DSTATCOM in Distribution Systems. IET Power Electron. 2017, 10, 1529–1538. [Google Scholar] [CrossRef]
- Emam, A.S.; Azmy, A.M.; Rashad, E.M. Enhanced Model Predictive Control-Based STATCOM Implementation for Mitigation of Unbalance in Line Voltages. IEEE Access 2020, 8, 225995–226007. [Google Scholar] [CrossRef]
- Ye, J.; Gooi, H.B.; Zhang, X.; Iu, H.H.C. Simplified Four-Level Inverter-Based Single-Phase DSTATCOM Using Model Predictive Control. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3382–3395. [Google Scholar] [CrossRef]
- Badoni, M.; Singh, A.; Singh, B. Adaptive Neurofuzzy Inference System Least-Mean-Square-Based Control Algorithm for DSTATCOM. IEEE Trans. Ind. Inform. 2016, 12, 483–492. [Google Scholar] [CrossRef]
- Modi, G.; Kumar, S.; Singh, B. Improved Widrow-Hoff Based Adaptive Control of Multiobjective PV-DSTATCOM System. IEEE Trans. Ind. Appl. 2020, 56, 1930–1939. [Google Scholar] [CrossRef]
- Singh, B.; Kandpal, M.; Hussain, I. Control of Grid Tied Smart PV-DSTATCOM System Using an Adaptive Technique. IEEE Trans. Smart Grid 2018, 9, 3989–3993. [Google Scholar] [CrossRef]
- Patel, P.; Rout, S.; Swain, M.; Patel, P. DSA/WDO Based PI Controller Tuning for D- STATCOM for Reactive Power Compensation. In Proceedings of the 2015 IEEE UP Section Conference on Electrical Computer and Electronics (UPCON), Allahabad, India, 4–6 December 2015; pp. 1–6. [Google Scholar]
- Surendran, A.M.; Baburai, P. A Comparison Study of Optimization Based PI Controller Tuning for PQ Improvement in DSTATCOM. In Proceedings of the 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies ICICICT, Kannur, India, 5–6 July 2019; pp. 179–184. [Google Scholar] [CrossRef]
- Xu, J.; Tang, S.; He, G.; Gong, Z.; Lin, G. Modeling and Control Research of Fractional-Order Cascaded. Fractal Fract. 2024, 8, 392. [Google Scholar] [CrossRef]
- Doğan, K.; Güngör, M.E.; Orhan, A.; Özdemir, M. International Journal of Hydrogen Energy Fuel Cell + STATCOM as Synchronous Generator in Modern Power Systems. Int. J. Hydrog. Energy 2024, 75, 314–325. [Google Scholar] [CrossRef]
- Goud, B.S.; Reddy, C.R.; Bajaj, M.; Elattar, E.E. Power Quality Improvement Using Distributed Power Flow Controller with BWO-Based FOPID Controller. Sustainability 2021, 13, 11194. [Google Scholar] [CrossRef]
- Daraz, A. Optimized Cascaded Controller for Frequency Stabilization of Marine Microgrid System. Appl. Energy 2023, 350, 121774. [Google Scholar] [CrossRef]
- Ali, M.; Kotb, H.; Aboras, K.M.; Abbasy, N.H. Design of Cascaded Pi-Fractional Order PID Controller for Improving the Frequency Response of Hybrid Microgrid System Using Gorilla Troops Optimizer. IEEE Access 2021, 9, 150715–150732. [Google Scholar]
- Refaat, M.M.; Atia, Y.; Sayed, M.M.; Fattah, H.A. Adaptive Fuzzy Logic Controller as MPPT Optimization Technique Applied to Grid-Connected PV Systems. In Modern Maximum Power Point Tracking Techniques For Photovoltaic Energy Systems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 247–281. [Google Scholar]
- Rezk, H.; Fathy, A. Performance Improvement of PEM Fuel Cell Using Variable Step-Size Incremental Resistance MPPT Technique. Sustainability 2020, 12, 5601. [Google Scholar] [CrossRef]
- Agwa, A.M.; Alanazi, T.I.; Kraiem, H.; Touti, E.; Alanazi, A.; Alanazi, D.K. MPPT of PEM Fuel Cell Using PI-PD Controller Based on Golden Jackal Optimization Algorithm. Biomimetics 2023, 8, 426. [Google Scholar] [CrossRef]
- Braik, M.; Hammouri, A.; Atwan, J.; Al-Betar, M.A.; Awadallah, M.A. White Shark Optimizer: A Novel Bio-Inspired Meta-Heuristic Algorithm for Global Optimization Problems. Knowl. Based Syst. 2022, 243, 108457. [Google Scholar]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems: Modeling, Control, and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2010; ISBN 0470551569. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).