Abstract
In this paper, we present a highly efficient analytical method that combines the Laplace transform and the residual power series approach to approximate solutions of nonlinear time-fractional partial differential equations (PDEs). First, we derive the analytical method for a general form of fractional partial differential equations. Then, we apply the proposed method to find approximate solutions to the time-fractional coupled Berger equations, the time-fractional coupled Korteweg–de Vries equations and time-fractional Whitham–Broer–Kaup equations. Secondly, we extend the proposed method to solve the two-dimensional time-fractional coupled Navier–Stokes equations. The proposed method is validated through various test problems, measuring quality and efficiency using error norms and , and compared to existing methods.
1. Introduction
Fractional calculus (FC) extends classical calculus to explore derivatives and integrals of non-integer order, allowing for a wide range of applications and real-life phenomena. Furthermore, FC has become a crucial tool in several fields, including engineering, solid-state physics, signal and image processing, chemistry, biology, ecology, stochastic-based finance, economics, control theory, fiber optics, and viscoelasticity [1,2,3,4,5]. Although many of these problems have been studied using fractional ordering in the literature, many models using fractional differential operators remain to be solved. Therefore, fractional differential equations (FDEs) have drawn the attention of several researchers in developing several analytical and numerical methods for linear and nonlinear problems and discussing dynamical systems. [6,7,8]. Sene and Fall [9] proposed the homotopy perturbation Laplace transform method of obtaining the approximate solution of the fractional diffusion equations. Tamsir and Srivastava [10] suggested the fractional reduced differential transform method to study analytically linear and nonlinear time-fractional order Klein–Gordon equations. Sahu and Jena [11] employed the Laplace Adomian decomposition technique to analyze a numerical study with the SDIQR mathematical model of COVID-19 for infected migrants in Odisha. Owolabi et al. [12] proposed the Laplace transform–homotopy perturbation method to simulate the time-dependent predator–prey model of Lotka–Volterra. Jawarneh et al. [13] introduced the new transform iteration method and the residual power series transform method to solve fractional nonlinear system Korteweg–de Vries (KdV) equations.
The Laplace residual power series (LRPS) approach is a highly efficient and accurate method for approximating solutions of nonlinear fractional-order partial differential equations (NFPDEs). This approach combines residual power series analysis with the Laplace transformation to provide a practical and fast convergence solution for linear and nonlinear problems. In this approach, the given equations are transferred into Laplace space, constructing fractional power series solutions to the new form of the equations and then using the inverse Laplace transform to obtain the solutions of the original equations. This method has been successfully applied to various equations, yielding accurate and convergent solutions, such as neutral fractional pantograph equations [14], temporal-fractional Drinfeld–Sokolov–Wilson systems [15], coupled fractional neutron diffusion equations [16], time-fractional reaction–diffusion models [17], nonlinear time-fractional Kolmogorov and Rosenau–Hyman models [18], three-dimensional fractional Helmholtz equations [19], fractional Riccati differential equations [20], and nonlinear time-fractional coupled Boussinesq–Burger equations [21].
In this work, we aim to accomplish three primary objectives. Firstly, we aim to develop the LRPS method to derive the analytical solution for a general form of (1+1)-dimensional NFPDEs and use it to solve various time-fractional coupled differential equations. Secondly, we aim to expand the application of the proposed approach to address (2+1)-dimensional time-fractional nonlinear coupled Navier–Stokes equations. Lastly, we aim to provide numerical and graphical solutions for different values to demonstrate the effectiveness of LRPS solutions compared to other methodologies, such as Laplace Adomian decomposition (LADM), the Laplace variational iteration method (LVIM), the residual differential transformation method (RDTM), and the Chebyshev method. Our findings highlight the simplicity, accuracy, and practical applicability of the proposed method.
The paper is organized as follows: in Section 2, we define key concepts and terminology. In Section 3, we present the proposed method and demonstrate its applicability to find analytical solutions of some nonlinear time-fractional coupled differential equations. Then, we explain the generalized LRPS method for the (2+1)-dimensional time-fractional coupled Navier–Stokes equations Section 4. Finally, we summarize our findings in Section 5.
2. Basic Concepts
In this section, we will present some basic concepts of the fractional derivative of order , where . Although there are various definitions of fractional derivatives available, Riemann–Liouville and Caputo fractional derivatives are the most commonly used ones in the literature. So, the fractional derivative used in this study is in the Caputo meaning.
Definition 1
([1]). The Riemann–Liouville fractional integral operator of order is defined by
Definition 2
([1]). For n to be the smallest integer that exceeds λ, the Caputo time-fractional derivative operator of order is defined as
Definition 3
([16]). Let be a continuous function on and of exponential order δ. Then, the Laplace transform of the function is denoted and defined as follows:
whereas the inverse Laplace transform of the function is defined as follows:
where lies in the right half plane of the absolute convergence of the Laplace integral.
Assuming , , , , we summarize the Laplace transform and its inverse below, highlighting their most prominent features.
- 1.
- .
- 2.
- .
- 3.
- 4.
- .
In the following lemma, we introduce several essential characteristics of the Laplace transform and the fractional derivative in the Caputo sense.
Lemma 1
([16]). Let be a continuous function on and of exponential orders δ, and . Then,
- (i)-
- ;
- (ii)-
- ;
- (iii)-
- ;
- (iv)-
- .
where (m-times).
Theorem 1.
Let be continuous on and of exponential order δ. Suppose that the function has the following fractional expansion:
then .
3. Derivation LRPS Method
In this section, we discuss how to construct the solutions to some nonlinear coupled fractional partial differential equations using the LRPS method. The main algorithm of this method for solving nonlinear NFPDEs can be summarized by applying the Laplace transform to the mentioned equation and using the expansion as given in Theorem 1 to represent the solution of Laplace NFPDEs. Then, the coefficients of this expansion are determined similarly to the RPS method but with a new vision and a new analysis. Finally, we apply the inverse Laplace transform and obtain a solution to this problem in the original space.
3.1. The (1+1)-Dimensional Time-Fractional Coupled Differential Equation
Consider the following coupled fractional equation in the general form
Subject to the initial conditions
where is the Caputo derivative, and and are linear and nonlinear operators, respectively, and .
By utilizing the Laplace transform on Equations (6)–(9), we obtain
Using the fact that and , we can write Equations (10) and (11) as
where . Now, we assume that both and have fractional power series representations as follows:
The k-th truncated series of Equations (14) and (15) take the forms
where nd are the initial conditions given in Equations (8) and (9). To find the unknown coefficients of the series in Equations (12) and (13), we define the Laplace residual functions for the coupled equations in Equations (16) and (17) as follows:
For the k-th Laplace residual function, we have
Substituting Equations (16) and (17) into Equations (20) and (21), we obtain
Using in Equations (22) and (23), we obtain
The next step is to solve the following system to calculate and
Finally, by substituting the series solution and obtained from Equations (26) and (27) into Equations (16) and (17) and taking the inverse Laplace transform, we obtain the solutions of system (6)–(9) as follows:
3.2. Illustrative Examples
This section presents three important examples of the LRPS method to demonstrate its performance and efficiency. Throughout this paper, we used the Wolfram Mathematica 14 software package to compute numerical results.
Example 1.

Consider the following coupled time-fractional Burger equations [22,23,24]:
Subject to the initial conditions
In this system, we have
Applying system (24) and (25), we obtain
If we take , we obtain
Next, by solving the system for , one can obtain:
In the same way, continuing to solve (26) and (27) for every and as a special case when and , we obtain
Substituting in Equations (28) and (29), we obtain
Table 1 compares the results of the proposed method with the results of other existing methods at . In comparison with the other methods, this method is more accurate.
Table 1.
The -norm errors for the suggested methods when of for Example 1 in comparison with the results of [24].
Example 2.
Consider the time-fractional coupled KdV equation [25,26,27,28]
with the initial conditions
where , and ρ is a constant. The exact solutions of this system at are given sa
In this system, we have
So, the system (24) and (25) for Equations (41) and (42) can be written as follows:
For , we get
Solving the system for , we obtain
Similarly, we can obtain both and for each . As a particular case, if we substitute by the initial conditions and in obtained solutions, we obtain
To obtain the solutions, we substitute the values of and into Equations (28) and (29):
Table 2 displays the error norms computed at different space and time levels, indicating acceptable accuracy with the current method at .
Table 2.
Maximum error norms for different values of and of the suggested methods for and corresponds to Example 2 at .
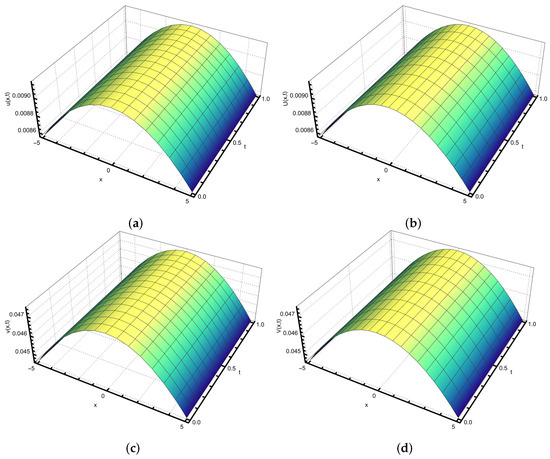
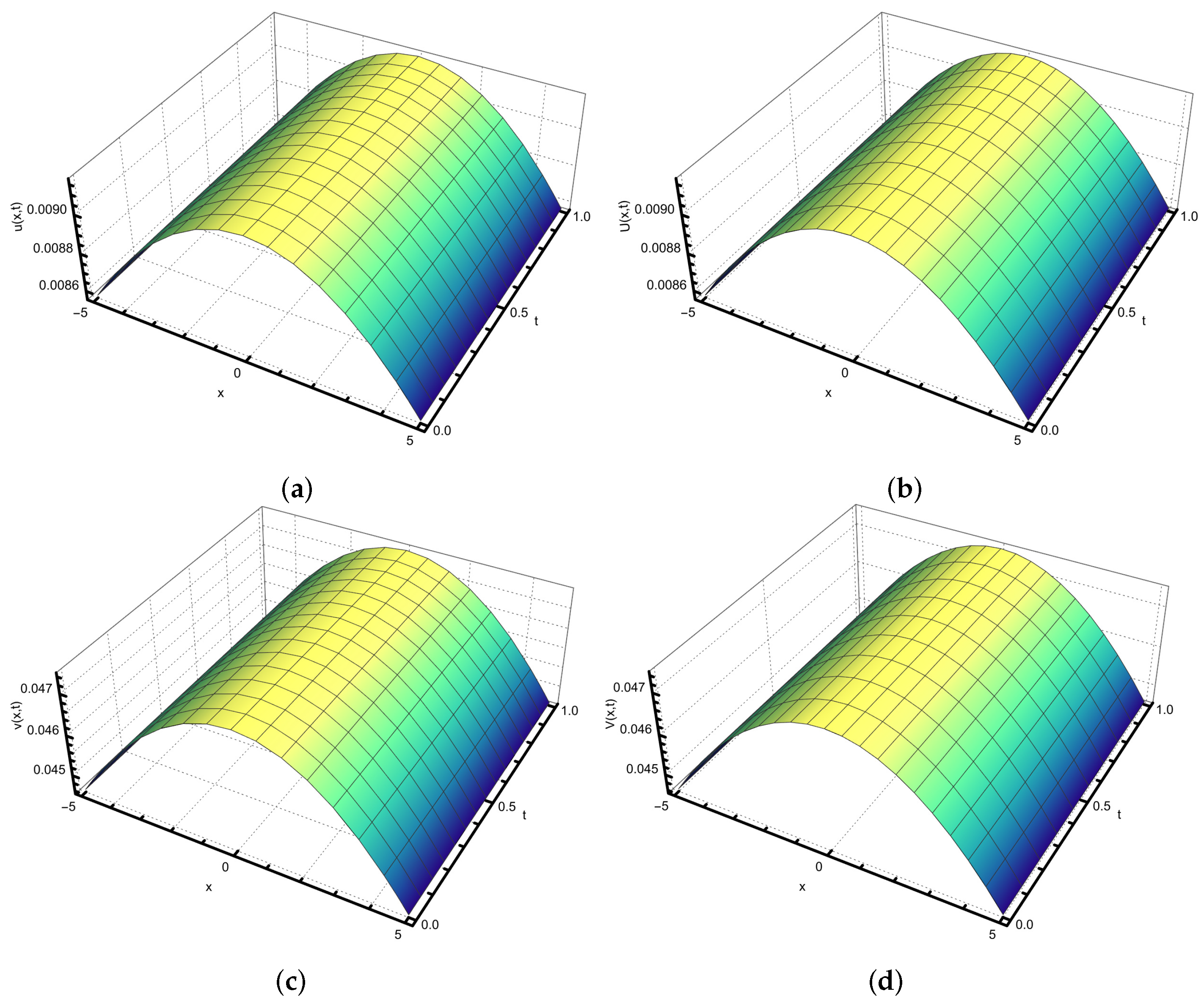
Since the exact solutions do not exist for varied values of λ, we need to confirm the validity of our method by measuring absolute two-step errors and . For the sake of comparison, the constants have been assumed to be and , and the results are listed in Table 3 in comparison to the results of the Chebyshev method [25]. Figure 1 shows the surface graphs of the approximate LRPS and the exact solutions for Equations (41) and (42) when and . These subfigures clearly show that the approximate solutions and are close to the exact solutions.
Table 3.
Comparison of error norms with the result obtained by Chebyshev method [25] for Example 2 with .
Figure 1.
Comparison between the exact solutions (a,c) and the approximate solutions (b,d) of and for Example 2 at and .
Example 3.
Consider the nonlinear time-fractional coupled Whitham–Broer–Kaup equations [29,30,31]:
Subject to the initial conditions
The linear and nonlinear parts of this system are
So, applying the system (24) and (25) for Equations (51) and (52), we obtain
To determine and , we consider , which yields to
Now, to determine and , we multiply the Equations (55) and (56) by and , respectively, and then solve recursively the the system for and , we obtain
Similarly, we determine and . The following are the first few elements of the sequence when .
Consequently, by substituting in Equations (28) and (29), one can write the approximate solutions for the system (51) and (52) as the following expansion:
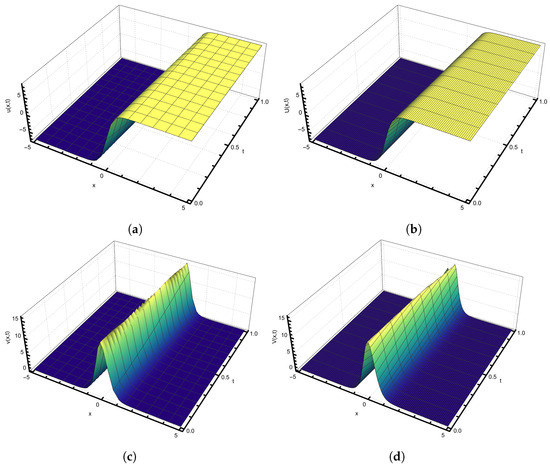
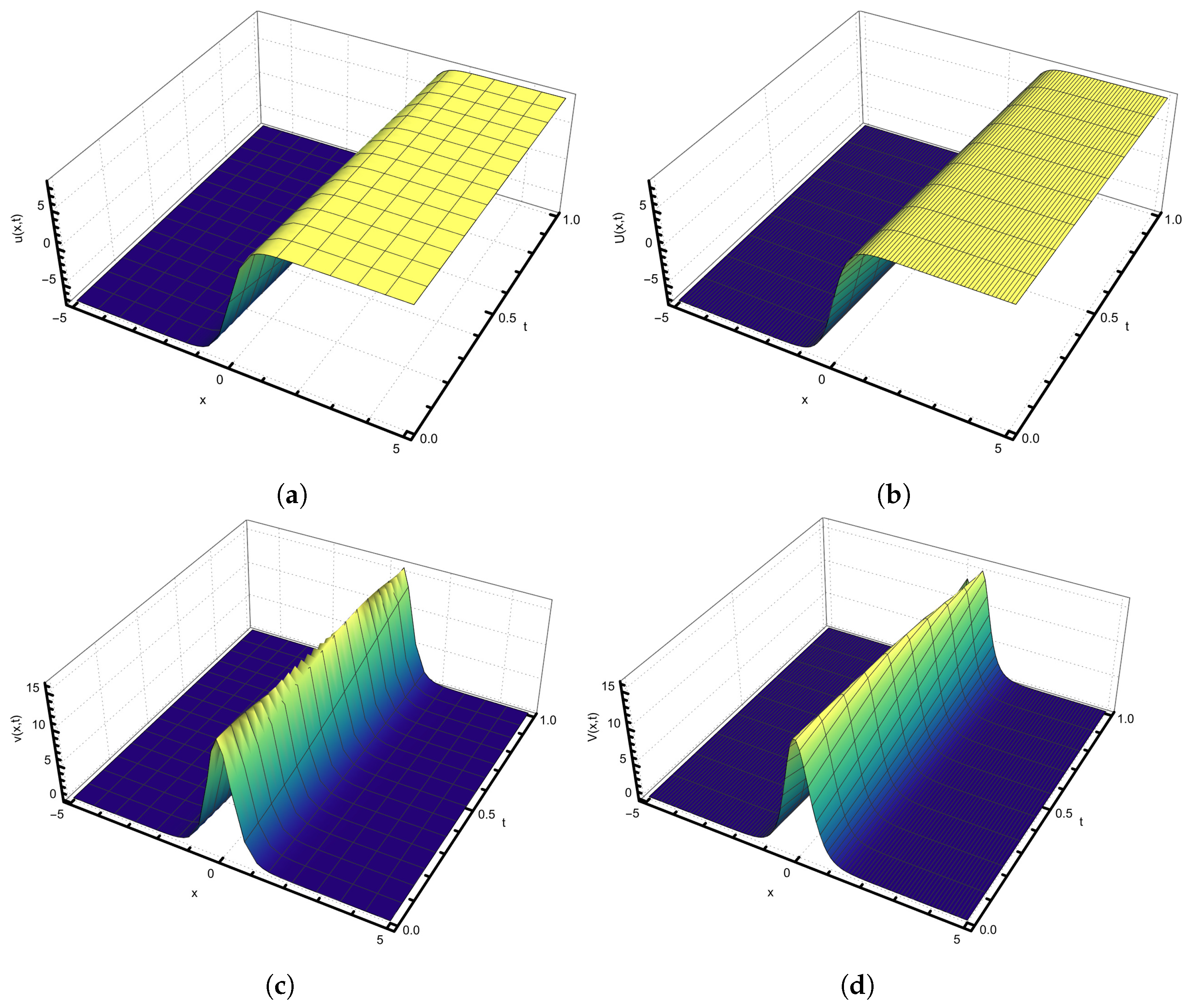
Table 4 summarizes the maximum absolute errors for the obtained solutions of system (51) and (52) computed at different values of and . Additionally, Figure 2 shows the behavior of the approximate solutions and compares them with the exact solution. The numerical and graphical results demonstrate the harmony and convergence between the approximate and exact solutions.
Table 4.
Maximum error norms for different values of and for and corresponds to Example 3 at and .
Figure 2.
Comparison between the exact solutions (a,c) and the approximate solutions (b,d) of and for Example 3 at and .
4. The (2+1)-Dimensional Time-Fractional Coupled Differential Equation
In this section, we applied the LRPS method to solve the two dimensional coupled fractional Navier–Stokes equations of the form
Subject to the initial conditions
Applying the Laplace transform to Equations (57) and (58), we obtain
Using and , we can write Equations (59) and (60) as
where . By writing transformed functions and as fractional power series representations, we obtain
The k-th truncated series of Equations (63) and (64) take the forms
where nd are the initial conditions. To find the unknown coefficients of the series in Equations (61) and (62), we define the Laplace residual functions for the coupled equations in Equations (65) and (66) as follows:
For the k-th Laplace residual function, we have
By substituting Equations (65) and (66) into Equations (69) and (70), we obtain
The last system can be written as
To determine and , we consider in Equations (73) and (74) and obtain
Solving the system for and , we obtain
Continuing in that manner to calculate and , we solve the following system for each
Finally, by substituting the series solution and obtained from Equations (77)–(80) into Equations (65) and (66) and taking the inverse Laplace transform, we obtain the solutions of system (57) and (58) as follows:
Example 4.
Let us assume two-dimensional incompressible time-fractional Navier–Stokes equations as [32,33]
Subject to the initial conditions
According to the discussion and obtained results in Section 4, Equations (77)–(80), the series coefficients are as follows:
Using Equations (81) and (82), we obtain
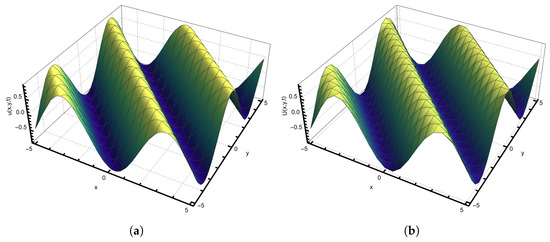
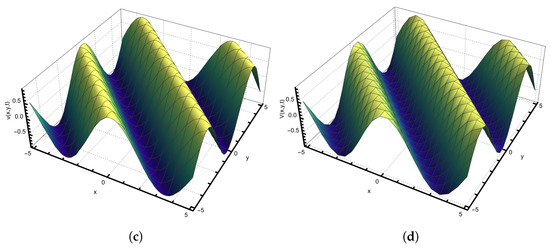
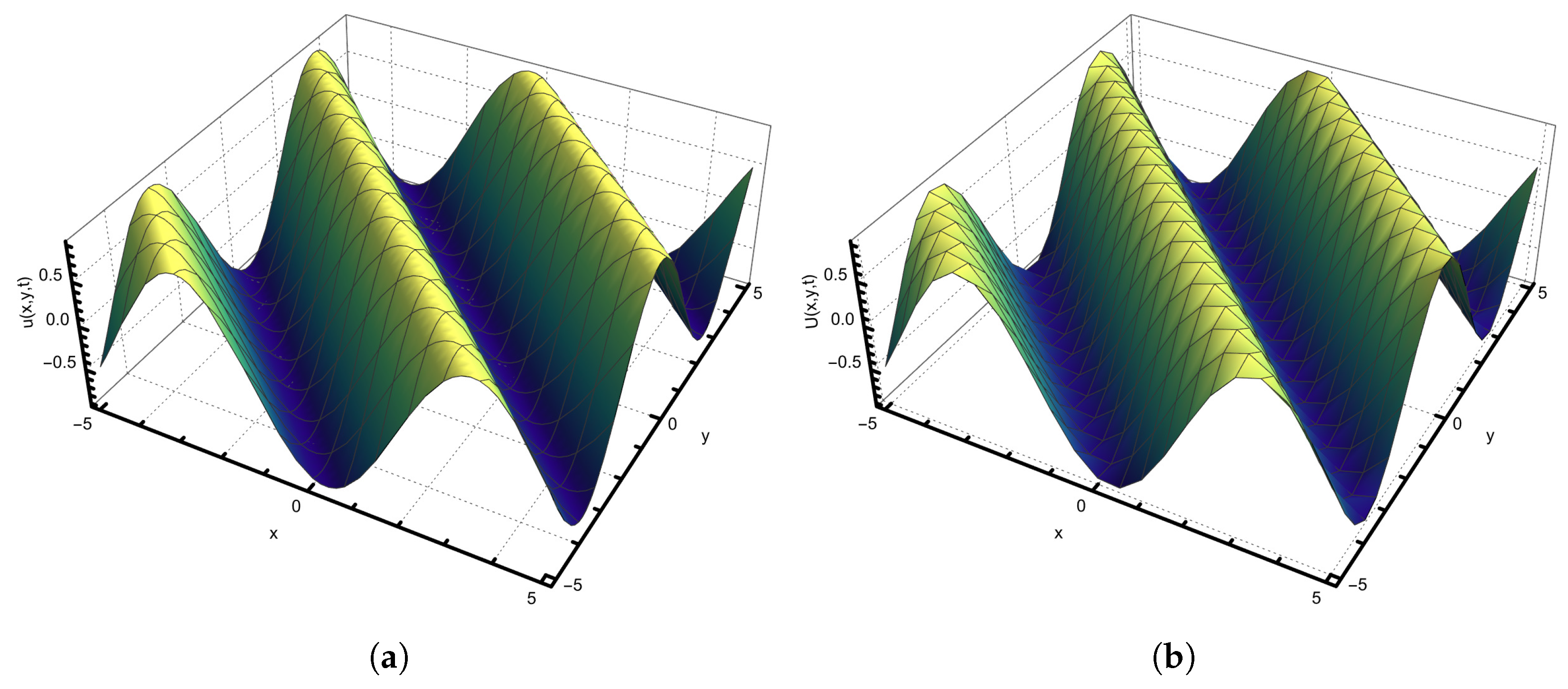
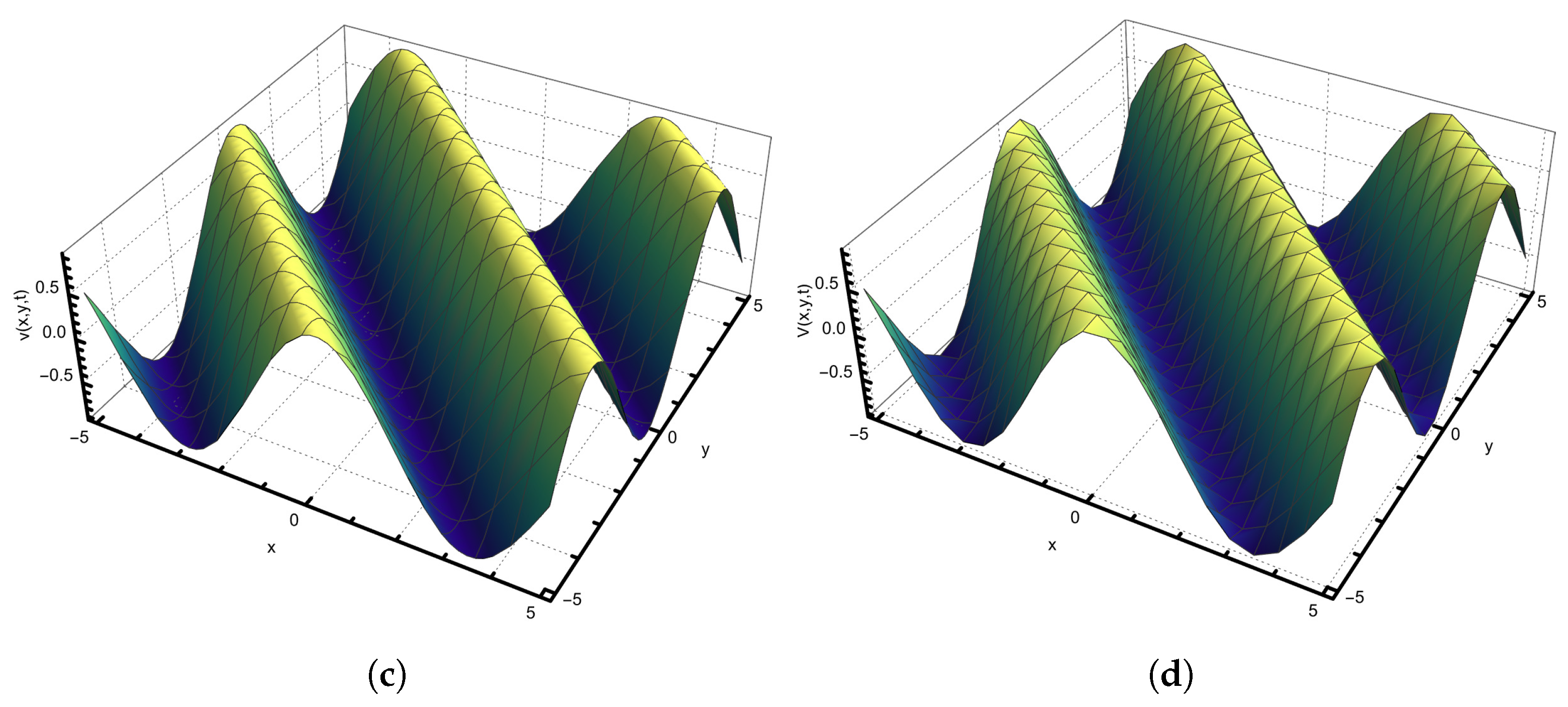
The efficiency of the proposed algorithm for Example 4 is shown in Figure 3. These subfigures depict surfaces of approximate and exact solutions for systems (83) and (84) at and .
Figure 3.
Comparison between the exact solutions (a,c) and the approximate solutions (b,d) of and for Example 4 at , and .
5. Conclusions
In the present study, the LRPS method is successfully applied to find the analytical solution of the (1+1)- and (2+1)-dimensional time-fractional coupled differential equations. The obtained results demonstrate the reliability and simplicity of the method. The proposed technique has the advantage of reducing the size of computation needed to figure out the coefficients in a power series form. The proposed expansion in our study allowed us to obtain a series solution for the equations in Laplace transform space. In comparison with other techniques, LRPS method is a competent tool to obtain the analytical solution of coupled nonlinear time-fractional partial differential equations.
Author Contributions
Conceptualization, A.R.H., A.A.M.R. and T.R.; Methodology, A.R.H., A.A.M.R. and T.R.; Software, A.R.H., A.A.M.R. and T.R.; Validation, A.R.H., A.A.M.R. and T.R.; Formal analysis, A.R.H., A.A.M.R. and T.R.; Investigation, A.R.H., A.A.M.R. and T.R.; Resources, A.R.H., A.A.M.R. and T.R.; Data curation, A.R.H., A.A.M.R. and T.R.; Writing—original draft, A.R.H., A.A.M.R. and T.R.; Writing—review & editing, A.R.H., A.A.M.R. and T.R.; Visualization, A.R.H., A.A.M.R. and T.R.; Supervision, A.R.H., A.A.M.R. and T.R.; Project administration, A.R.H., A.A.M.R. and T.R.; Funding acquisition, T.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Acknowledgments
The Researchers would like to thank the Deanship of Graduate Studies and Scientific Research at Qassim University for financial support (QU-APC-2024-9/1).
Conflicts of Interest
The authors declare no potential conflicts of interest.
References
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Hadhoud, A.R.; Rageh, A.A. Redefined Quintic B-Spline Collocation Method to Solve the Time-Fractional Whitham-Broer-Kaup Equations. Comput. Math. Methods 2024, 2024, 7326616. [Google Scholar] [CrossRef]
- Hadhoud, A.R.; Rageh, A.A.; Radwan, T. Computational solution of the time-fractional Schrödinger equation by using trigonometric B-spline collocation method. Fractal Fract. 2022, 6, 127. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Oldham, K.; Spanier, J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order; Elsevier: Amsterdam, The Netherlands, 1974. [Google Scholar]
- Al-Smadi, M.; Arqub, O.A.; Hadid, S. An attractive analytical technique for coupled system of fractional partial differential equations in shallow water waves with conformable derivative. Commun. Theor. Phys. 2020, 72, 085001. [Google Scholar] [CrossRef]
- Hadhoud, A.R.; Agarwal, P.; Rageh, A.A. Numerical treatments of the nonlinear coupled time-fractional Schrödinger equations. Math. Methods Appl. Sci. 2022, 45, 7119–7143. [Google Scholar] [CrossRef]
- Hadhoud, A.R.; Rageh, A.A.; Agarwal, P. Numerical method for solving two-dimensional of the space and space–time fractional coupled reaction-diffusion equations. Math. Methods Appl. Sci. 2023, 46, 6054–6076. [Google Scholar] [CrossRef]
- Sene, N.; Fall, A.N. Homotopy perturbation ρ-laplace transform method and its application to the fractional diffusion equation and the fractional diffusion-reaction equation. Fractal Fract. 2019, 3, 14. [Google Scholar] [CrossRef]
- Tamsir, M.; Srivastava, V.K. Analytical study of time-fractional order Klein–Gordon equation. Alex. Eng. J. 2016, 55, 561–567. [Google Scholar] [CrossRef]
- Sahu, I.; Jena, S.R. SDIQR mathematical modelling for COVID-19 of Odisha associated with influx of migrants based on Laplace Adomian decomposition technique. Model. Earth Syst. Environ. 2023, 9, 4031–4040. [Google Scholar] [CrossRef]
- Owolabi, K.M.; Pindza, E.; Karaagac, B.; Oguz, G. Laplace transform-homotopy perturbation method for fractional time diffusive predator–prey models in ecology. Partial Differ. Equ. Appl. Math. 2024, 9, 100607. [Google Scholar] [CrossRef]
- Jawarneh, Y.; Alsheekhhussain, Z.; Al-Sawalha, M.M. Fractional View Analysis System of Korteweg–de Vries Equations Using an Analytical Method. Fractal Fract. 2024, 8, 40. [Google Scholar] [CrossRef]
- Eriqat, T.; El-Ajou, A.; Moa’ath, N.O.; Al-Zhour, Z.; Momani, S. A new attractive analytic approach for solutions of linear and nonlinear neutral fractional pantograph equations. Chaos Solitons Fractals 2020, 138, 109957. [Google Scholar] [CrossRef]
- Alquran, M.; Ali, M.; Alsukhour, M.; Jaradat, I. Promoted residual power series technique with Laplace transform to solve some time-fractional problems arising in physics. Results Phys. 2020, 19, 103667. [Google Scholar] [CrossRef]
- Shqair, M.; Ghabar, I.; Burqan, A. Using Laplace Residual Power Series Method in Solving Coupled Fractional Neutron Diffusion Equations with Delayed Neutrons System. Fractal Fract. 2023, 7, 219. [Google Scholar] [CrossRef]
- Oqielat, M.N.; Eriqat, T.; Ogilat, O.; El-Ajou, A.; Alhazmi, S.E.; Al-Omari, S. Laplace-Residual Power Series Method for Solving Time-Fractional Reaction–Diffusion Model. Fractal Fract. 2023, 7, 309. [Google Scholar] [CrossRef]
- Aljarrah, H.; Alaroud, M.; Ishak, A.; Darus, M. Approximate solution of nonlinear time-fractional PDEs by Laplace residual power series method. Mathematics 2022, 10, 1980. [Google Scholar] [CrossRef]
- Albalawi, W.; Shah, R.; Nonlaopon, K.; El-Sherif, L.S.; El-Tantawy, S.A. Laplace Residual Power Series Method for Solving Three-Dimensional Fractional Helmholtz Equations. Symmetry 2023, 15, 194. [Google Scholar] [CrossRef]
- Burqan, A.; Sarhan, A.; Saadeh, R. Constructing Analytical Solutions of the Fractional Riccati Differential Equations Using Laplace Residual Power Series Method. Fractal Fract. 2022, 7, 14. [Google Scholar] [CrossRef]
- Sarhan, A.; Burqan, A.; Saadeh, R.; Al-Zhour, Z. Analytical Solutions of the Nonlinear Time-Fractional Coupled Boussinesq-Burger Equations Using Laplace Residual Power Series Technique. Fractal Fract. 2022, 6, 631. [Google Scholar] [CrossRef]
- Heydari, M.H.; Avazzadeh, Z. Numerical study of non-singular variable-order time fractional coupled Burgers’ equations by using the Hahn polynomials. Eng. Comput. 2022, 38, 101–110. [Google Scholar] [CrossRef]
- Albuohimad, B.; Adibi, H. On a hybrid spectral exponential Chebyshev method for time-fractional coupled Burgers equations on a semi-infinite domain. Adv. Differ. Equ. 2017, 2017, 85. [Google Scholar] [CrossRef]
- Ahmed, H.F.; Bahgat, M.; Zaki, M. Analytical approaches to space-and time-fractional coupled Burgers’ equations. Pramana 2019, 92, 38. [Google Scholar] [CrossRef]
- Albuohimad, B.; Adibi, H.; Kazem, S. A numerical solution of time-fractional coupled Korteweg-de Vries equation by using spectral collection method. Ain Shams Eng. J. 2018, 9, 1897–1905. [Google Scholar] [CrossRef]
- Alomari, A.; Massoun, Y. Numerical Solution of Time Fractional Coupled Korteweg-de Vries Equation with a Caputo Fractional Derivative in Two Parameters. IAENG Int. J. Comput. Sci. 2023, 50, 388–393. [Google Scholar]
- Khater, A.; Temsah, R.; Callebaut, D. Numerical solutions for some coupled nonlinear evolution equations by using spectral collocation method. Math. Comput. Model. 2008, 48, 1237–1253. [Google Scholar] [CrossRef]
- Bhrawy, A.; Doha, E.; Ezz-Eldien, S.; Abdelkawy, M. A numerical technique based on the shifted Legendre polynomials for solving the time-fractional coupled KdV equations. Calcolo 2016, 53, 1–17. [Google Scholar] [CrossRef]
- Yasmin, H. Numerical analysis of time-fractional Whitham-Broer-Kaup equations with exponential-decay kernel. Fractal Fract. 2022, 6, 142. [Google Scholar] [CrossRef]
- Chen, S.; Li, M.; Guan, B.; Li, Y.; Wang, Y.; Lin, X.; Liu, T. Abundant variant wave patterns by coupled Boussinesq–Whitham–Broer–Kaup equations. Chin. J. Phys. 2022, 78, 485–494. [Google Scholar] [CrossRef]
- Shah, R.; Khan, H.; Baleanu, D. Fractional Whitham–Broer–Kaup equations within modified analytical approaches. Axioms 2019, 8, 125. [Google Scholar] [CrossRef]
- Prakash, A.; Veeresha, P.; Prakasha, D.; Goyal, M. A new efficient technique for solving fractional coupled Navier–Stokes equations using q-homotopy analysis transform method. Pramana 2019, 93, 6. [Google Scholar] [CrossRef]
- Singh, B.K.; Kumar, P. FRDTM for numerical simulation of multi-dimensional, time-fractional model of Navier–Stokes equation. Ain Shams Eng. J. 2018, 9, 827–834. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).