
Nonlinear Fractional Evolution Control Modeling via Power Non-Local Kernels: A Generalization of Caputo–Fabrizio, Atangana–Baleanu, and Hattaf Derivatives


 , ,
, ,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- If , then the PFECM (1) reduces to the weighted generalized Hattaf fractional model:
- If , and , then the model (1) reduces to the Atangana–Baleanu fractional model:
- If , and , then the model (1) reduces to another form of the Atangana–Baleanu fractional model:
- If , and , then the model (1) reduces to the Caputo–Fabrizio fractional model:
1.1. Contribution and Novelty of This Work
1.2. Advantages of a Power Non-Local Fractional Operator
2. Basic Concepts
- represents the PML function given by
- represents a normalization positive function obeying
- denotes the standard weighted Riemann–Liouville fractional integral of order δ given by
- (i)
- (ii)
2.1. Hypothesis
2.2. Notations
3. Qualitative Behavior of the Fractional Control Evolution Model (1)
Hyers–Ulam Stability
4. Numerical Scheme
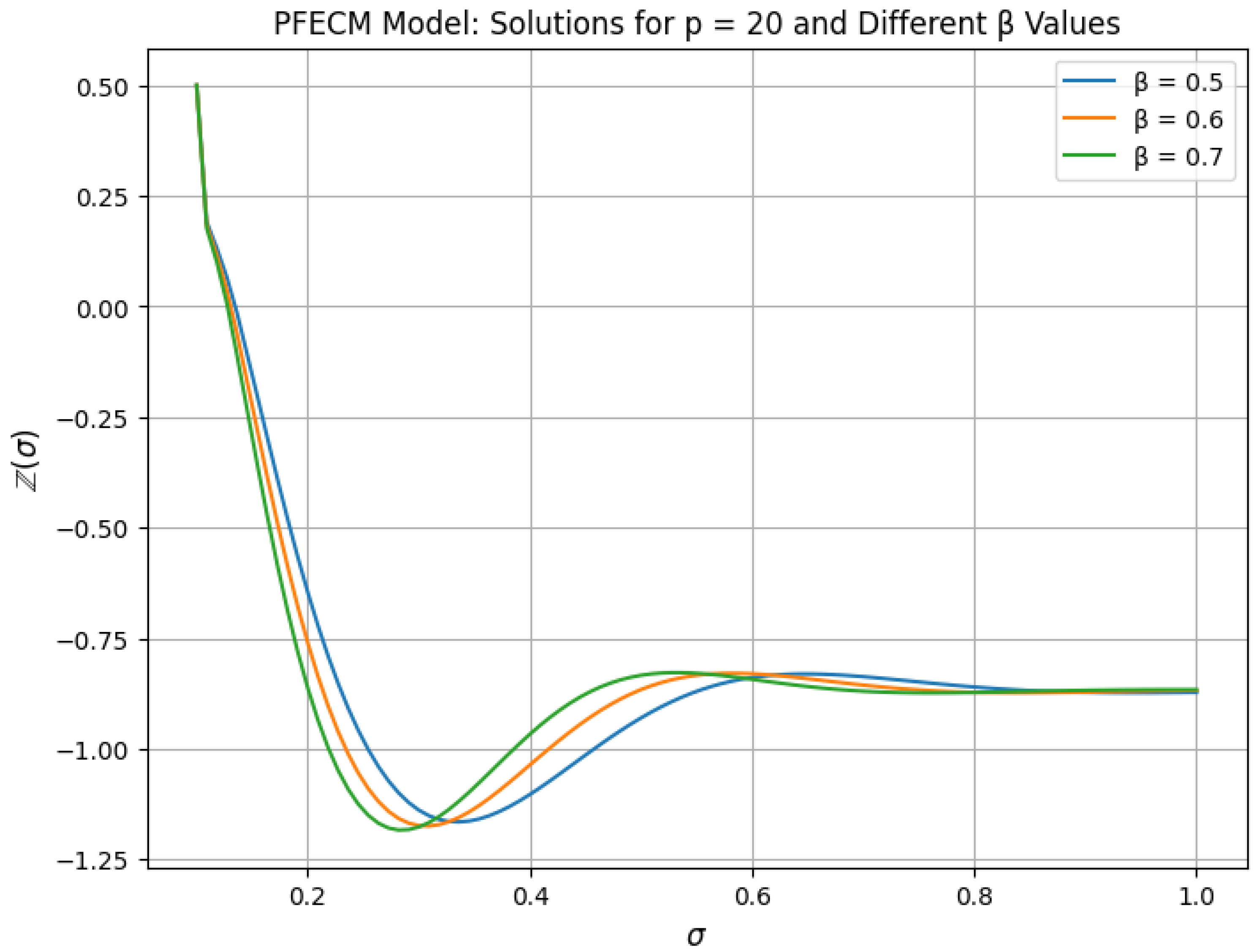
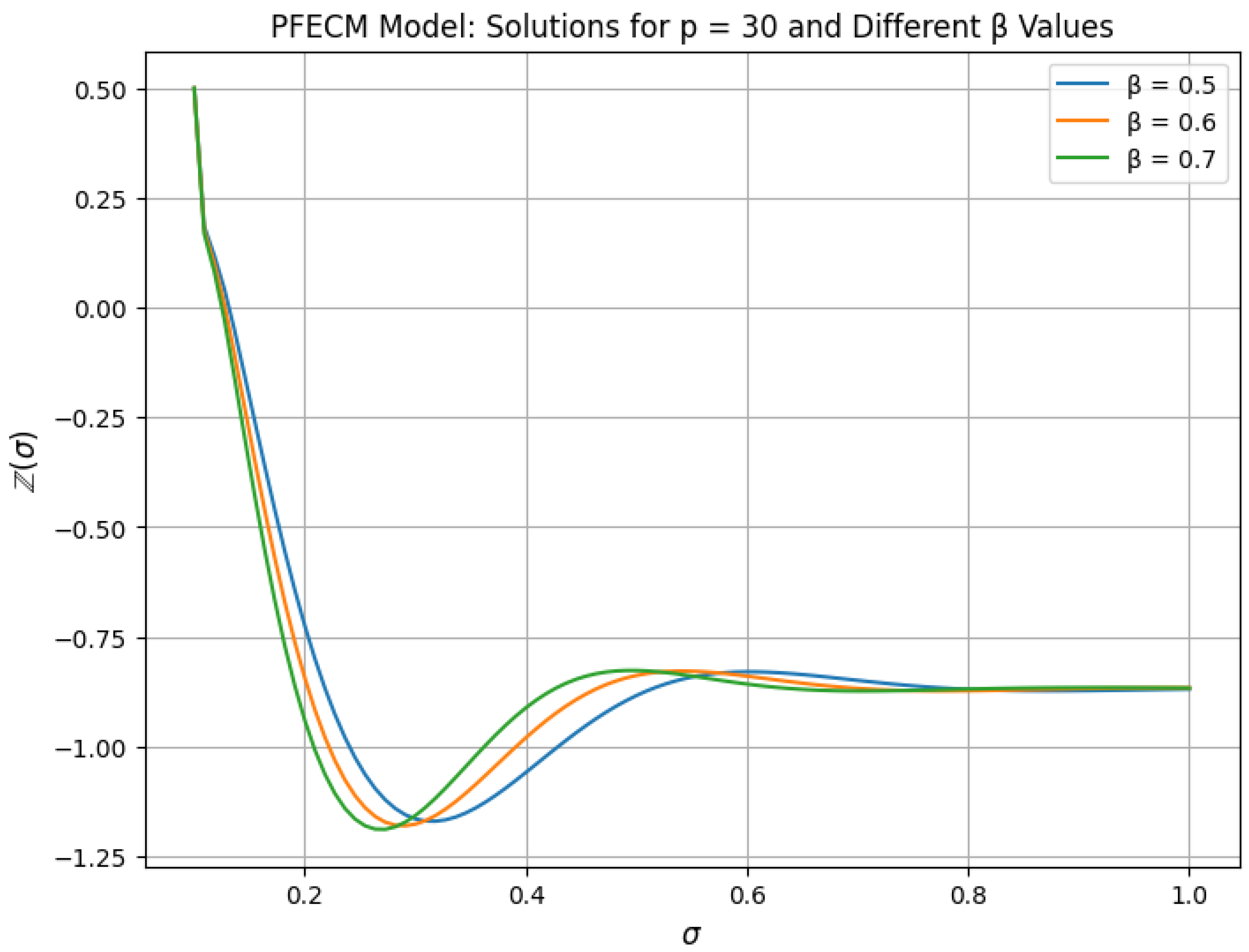
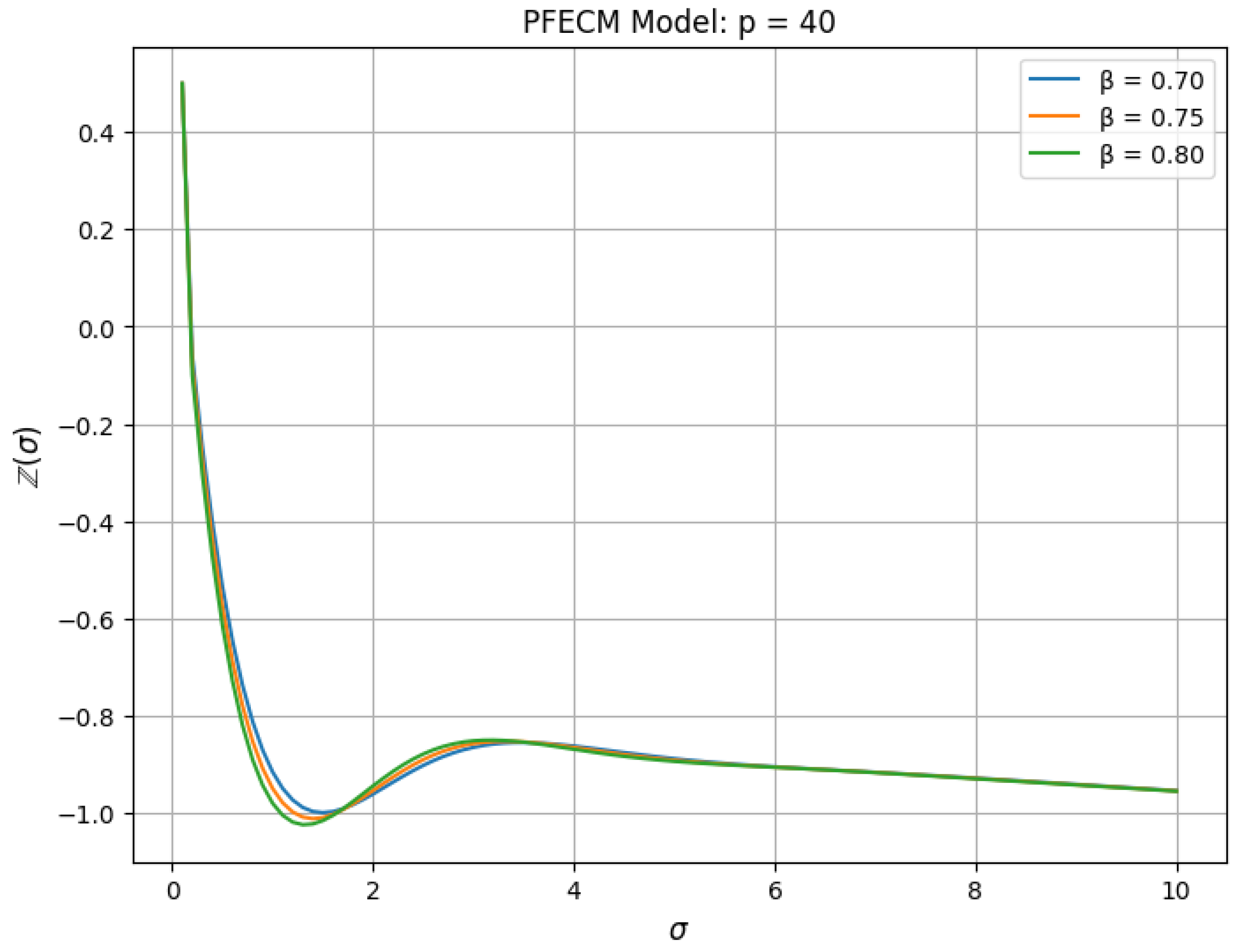
5. Examples and Simulation Results
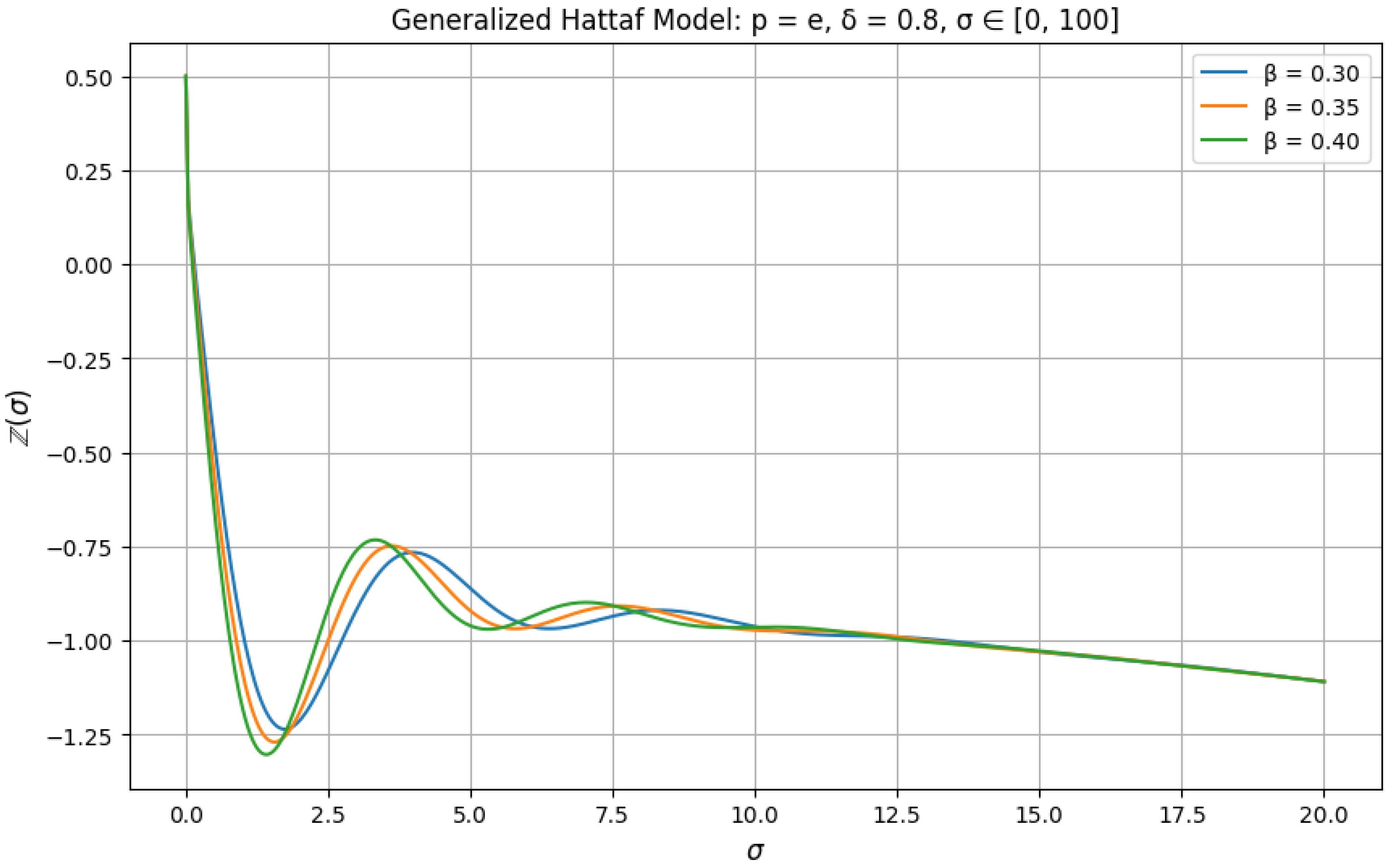
Symmetric Cases
- Case 1: If Then, the PFECM (23) is reduced to the following generalized Hattaf fractional model:For and for all , we haveAccording to Corollary 1, the generalized Hattaf fractional model (24) has a unique solution given by
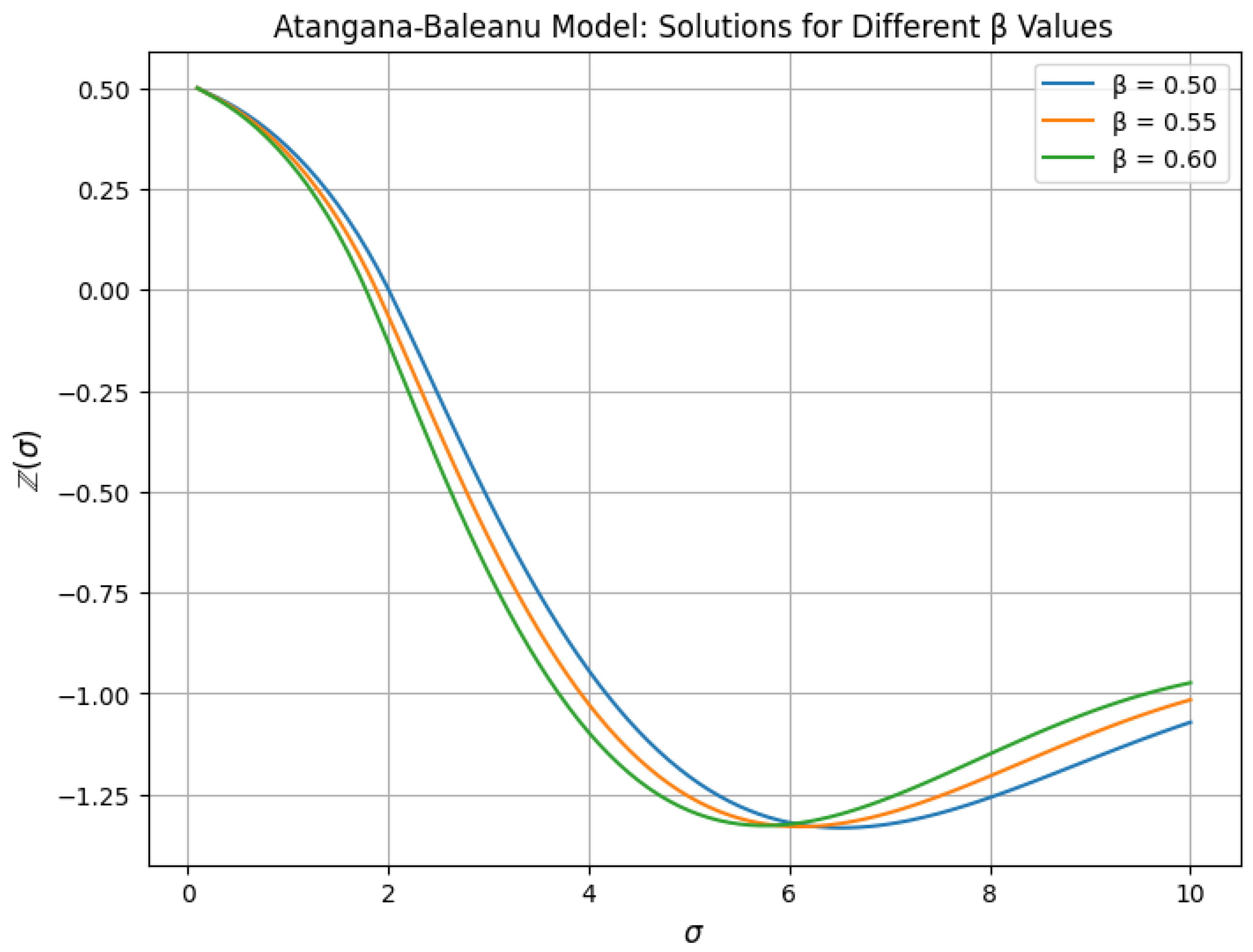
- Case 2: If , , and , then the model (23) is reduced to the following Atangana–Baleanu fractional model:For all , and we haveAccording to Corollary 2, the Atangana–Baleanu fractional model (25) has a unique solution given by
- Case 3: If , and Then, the model (23) is reduced to the following Caputo–Fabrizio fractional model:For , , , and we haveAccording to Corollary 3, the Caputo–Fabrizio fractional model (26) has a unique solution given by
6. Discussion
7. Conclusions
- Establishment of Existence and Uniqueness: Using fixed-point theory, we rigorously proved the existence and uniqueness of solutions for the nonlinear fractional evolution control system under appropriate conditions. This result holds for the generalized fractional derivative with a power non-local kernel, and thus encompasses the specific cases of the aforementioned established derivatives.
- Demonstration of Hyers–Ulam Stability: We established the Hyers–Ulam stability of the system, demonstrating the robustness of the solutions against small perturbations. This property, combined with our numerical scheme based on Lagrange interpolation polynomials, is crucial for ensuring the reliability of numerical approximations and the practical applicability of the model to real-world scenarios.
- Versatile Tool for Complex System Modeling: This flexible framework introduces a novel power fractional derivative, provides strong theoretical results, and presents a practical numerical method. The PFD approach represents a significant advancement in modeling systems with intricate memory processes, opening new avenues for research in fractional calculus and its diverse applications.
- Numerical Validation of Model Adaptability: Our numerical results demonstrate the proposed model’s adaptability to a wide range of dynamics. The findings highlight the significance of the power non-local kernel for fractional-order modeling, along with its ability to fine-tune model behavior through both the power parameter and fractional order, making it suitable for representing complex dynamical behaviors.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon & Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Magin, R.L. Fractional Calculus in Bioengineering; Begell House: Redding, CA, USA, 2006. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematics Studies; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus. In Series on Complexity, Nonlinearity and Chaos; World Scientific Publishing Co., Pte. Ltd.: Hackensack, NJ, USA, 2012; Volume 3. [Google Scholar]
- Srivastava, H.M.; Saad, K.M. Some new models of the time-fractional gas dynamics equation. Adv. Math. Models Appl. 2018, 3, 5–17. [Google Scholar]
- Algahtani, O.J.J. Comparing the Atangana–Baleanu and Caputo–Fabrizio derivative with fractional order: Allen Cahn model. Chaos Solitons Fractals 2016, 89, 552–559. [Google Scholar] [CrossRef]
- Oliveira, E.C.D.; Machado, J.A. A review of definitions for fractional derivatives and integral. Math. Probl. Eng. 2014, 1–7. [Google Scholar] [CrossRef]
- Bayın, S.Ş. Definition of the Riesz derivative and its application to space fractional quantum mechanics. J. Math. Phys. 2016, 57, 123501. [Google Scholar] [CrossRef]
- Ma, L.; Li, C. On Hadamard fractional calculus. Fractals 2017, 25, 1750033. [Google Scholar] [CrossRef]
- Ferrari, F. Weyl and Marchaud derivatives: A forgotten history. Mathematics 2018, 6, 6. [Google Scholar] [CrossRef]
- Anderson, D.R.; Ulness, D.J. Properties of the Katugampola fractional derivative with potential application in quantum mechanics. J. Math. Phys. 2015, 56, 063502. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. Applications of new time and spatial fractional derivatives with exponential kernels. Prog. Fractional Differ. Appl. 2016, 2, 1–11. [Google Scholar] [CrossRef]
- Shah, K.; Sher, M.; Abdeljawad, T. Study of evolution problem under Mittag–Leffler type fractional order derivative. Alex. Eng. J. 2020, 59, 3945–3951. [Google Scholar] [CrossRef]
- Alraqad, T.; Almalahi, M.A.; Mohammed, N.; Alahmade, A.; Aldwoah, K.A.; Saber, H. Modeling Ebola Dynamics with a Φ-Piecewise Hybrid Fractional Derivative Approach. Fractal Fract. 2024, 8, 596. [Google Scholar] [CrossRef]
- Aldwoah, K.A.; Almalahi, M.A.; Hleili, M.; Alqarni, F.A.; Aly, E.S.; Shah, K. Analytical study of a modified-ABC fractional order breast cancer model. J. Appl. Math. Comput. 2024, 70, 1–32. [Google Scholar]
- Aldwoah, K.A.; Almalahi, M.A.; Abdulwasaa, M.A.; Shah, K.; Kawale, S.V.; Awadalla, M.; Alahmadi, J. Mathematical analysis and numerical simulations of the piecewise dynamics model of Malaria transmission: A case study in Yemen. AIMS Math 2024, 9, 4376–4408. [Google Scholar] [CrossRef]
- Kavitha, K.; Vijayakumar, V.; Udhayakumar, R.; Nisar, K.S. Results on the existence of Hilfer fractional neutral evolution equations with infinite delay via measures of noncompactness. Math. Appl. Sci. 2021, 44, 1438–1455. [Google Scholar] [CrossRef]
- Raja, M.; Vijayakumar, V.; Udhayakumar, R.; Nisar, K.S. Results on existence and controllability results for fractional evolution inclusions of order 1 < r < 2 with Clarke’s subdifferential type. Numer. Methods Partial. Differ. Equ. 2024, 40, e22691. [Google Scholar]
- Saber, H.; Almalahi, M.A.; Albala, H.; Aldwoah, K.; Alsulami, A.; Shah, K.; Moumen, A. Investigating a Nonlinear Fractional Evolution Control Model Using W-Piecewise Hybrid Derivatives: An Application of a Breast Cancer Model. Fractal Fract. 2024, 8, 735. [Google Scholar] [CrossRef]
- Almalahi, M.A.; Ibrahim, A.B.; Almutairi, A.; Bazighifan, O.; Aljaaidi, T.A.; Awrejcewicz, J. A qualitative study on second-order nonlinear fractional differential evolution equations with generalized ABC operator. Symmetry 2022, 14, 207. [Google Scholar] [CrossRef]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Hattaf, K. A new generalized definition of fractional derivative with non-singular kernel. Computation 2020, 8, 49. [Google Scholar] [CrossRef]
- Al-Refai, M. On weighted Atangana-Baleanu fractional operators. Adv. Difference Equ. 2020, 11, 3. [Google Scholar] [CrossRef]
- Yadav, P.; Jahan, S.; Shah, K.; Peter, O.J.; Abdeljawad, T. Fractional-order modelling and analysis of diabetes mellitus: Utilizing the Atangana-Baleanu Caputo (ABC) operator. Alex. Eng. J. 2023, 81, 200–209. [Google Scholar] [CrossRef]
- Aldwoah, K.A.; Almalahi, M.A.; Shah, K. Theoretical and numerical simulations on the hepatitis B virus model through a piecewise fractional order. Fractal Fract. 2023, 7, 844. [Google Scholar] [CrossRef]
- Khan, H.; Alzabut, J.; Alfwzan, W.F.; Gulzar, H. Nonlinear dynamics of a piecewise modified ABC fractional-order leukemia model with symmetric numerical simulations. Symmetry 2023, 15, 1338. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.; Jang, B. A Novel Numerical Method for Solving Nonlinear Fractional-Order Differential Equations and Its Applications. Fractal Fract. 2024, 8, 65. [Google Scholar] [CrossRef]
- Azeem, M.; Farman, M.; Akgül, A.; De la Sen, M. Fractional order operator for symmetric analysis of cancer model on stem cells with chemotherapy. Symmetry 2023, 15, 533. [Google Scholar] [CrossRef]
- Lotfi, E.M.; Zine, H.; Torres, D.F.M.; Yousfi, N. The power fractional calculus: First definitions and properties with applications to power fractional differential equations. Mathematics 2022, 10, 3594. [Google Scholar] [CrossRef]
- Zitane, H.; Torres, D.F. A class of fractional differential equations via power non-local and non-singular kernels: Existence, uniqueness and numerical approximations. Phys. Nonlinear Phenom. 2024, 457, 133951. [Google Scholar] [CrossRef]
- Banerjee, J.; Ghosh, U.; Sarkar, S.; Das, S. A study of fractional Schrödinger equation composed of Jumarie fractional derivative. Pramana 2017, 88, 1–15. [Google Scholar] [CrossRef]
- Tyagi, A.K.; Chandel, J. Solution of Inhomogeneous Linear Fractional Differential Equations Involving Jumarie Fractional Derivative. J. Sci. Res. 2023, 15, 672–693. [Google Scholar] [CrossRef]
- Yue, Y.; He, L.; Liu, G. Modeling and application of a new nonlinear fractional financial model. J. Appl. Math. 2013, 1, 325050. [Google Scholar] [CrossRef]
- Al-Refai, M.; Jarrah, A.M. Fundamental results on weighted Caputo–Fabrizio fractional derivative. Chaos Solitons Fractals 2019, 126, 7–11. [Google Scholar] [CrossRef]
- Hattaf, K. On some properties of the new generalized fractional derivative with non-singular kernel. Math. Probl. Eng. 2021, 6, 1580396. [Google Scholar] [CrossRef]
- Ibrahim, R.W. Generalized Hyers-Ulam stability for fractional differential equations. Int. J. Math. 2012, 23, 1250056. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gassem, F.; Almalahi, M.; Osman, O.; Muflh, B.; Aldwoah, K.; Kamel, A.; Eljaneid, N. Nonlinear Fractional Evolution Control Modeling via Power Non-Local Kernels: A Generalization of Caputo–Fabrizio, Atangana–Baleanu, and Hattaf Derivatives. Fractal Fract. 2025, 9, 104. https://doi.org/10.3390/fractalfract9020104
Gassem F, Almalahi M, Osman O, Muflh B, Aldwoah K, Kamel A, Eljaneid N. Nonlinear Fractional Evolution Control Modeling via Power Non-Local Kernels: A Generalization of Caputo–Fabrizio, Atangana–Baleanu, and Hattaf Derivatives. Fractal and Fractional. 2025; 9(2):104. https://doi.org/10.3390/fractalfract9020104
Chicago/Turabian StyleGassem, F., Mohammed Almalahi, Osman Osman, Blgys Muflh, Khaled Aldwoah, Alwaleed Kamel, and Nidal Eljaneid. 2025. "Nonlinear Fractional Evolution Control Modeling via Power Non-Local Kernels: A Generalization of Caputo–Fabrizio, Atangana–Baleanu, and Hattaf Derivatives" Fractal and Fractional 9, no. 2: 104. https://doi.org/10.3390/fractalfract9020104
APA StyleGassem, F., Almalahi, M., Osman, O., Muflh, B., Aldwoah, K., Kamel, A., & Eljaneid, N. (2025). Nonlinear Fractional Evolution Control Modeling via Power Non-Local Kernels: A Generalization of Caputo–Fabrizio, Atangana–Baleanu, and Hattaf Derivatives. Fractal and Fractional, 9(2), 104. https://doi.org/10.3390/fractalfract9020104