
Fractional Calculus of Piecewise Continuous Functions


{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- have back-compatibility with classic (integer order) formulations;
- be shift or scale invariant, since these are important characteristics of many physical, biologic, and social systems;
- be defined for as many as possible functions, avoiding particular features;
- be coherent with auxiliary mathematical tools, e.g., Laplace (bilateral) or Mellin transforms;
- transform a sinusoid into a sinusoid;
- have inverse, even if distribution theory has to be used, a very current situation in Physics and Engineering.
- They make a confusion between the constant function and the Heaviside unit step;
- With the bad help of the one-sided Laplace transform, introduce wrong initial-conditions (these depend on the past history of the system and on its structure, not on any mathematical tool; the C initial-conditions are not good because they have integer order [19];
- Their derivatives of a sinusoid is not a sinusoid, preventing the correct definition of frequency response;
- They do not have additivity/commutativity of the orders which transforms an invariant system in variable.
2. The Duhamel Convolution
2.1. Properties
- The eigenfunction of the convolution is the exponential, .
- Commutativity
- Associativity
- Invertibility
- Neutral element
- CausalityIf , thenIt means that the output at a given depends only on the values of for In the following, we shall be dealing with this case.
- Shifting
- Derivation
- Due to the commutativity, we can choose which is the more suitable function to be differentiated;
- It is known that the result of the convolution is a smoother function than each of the factors;
- Attending to the previous statement, it is clear that the existence of the right hand side implies the existence of the left one, but the reverse may not be true;
- For functions with LT, they are equal.
2.2. Bounded Piecewise Continuous Functions
- Let be a bounded support function (BSF)The corresponding output is given byThis means that, even the input has finite duration, the output has an infinite support. For simplicity, we will assume by default that the convolution exists but is null for values of t less than the lower limit of the integral.Example 1.Letwhere and is the Heaviside function. Assume that a is rectangular pulseThe convolution gives
- Consider two BSF, , as above, and For simplicity, set We haveandso that is given byAttending to the fact thatwe can show the validity of the additivity property. With some interest in applications is the case (disjoint supports). In this case,In the general case stated in Definition 2 and for a given we obtainFinally, for any we have
- These results are useful in the computation of fractional derivatives.
3. Liouville Type Derivatives
3.1. Definitions
- If has Laplace transform, the three derivatives give the same result;
- The Liouville derivative demands too much from analytical point of view, since it needs the existence of the order derivative, but this feature is interesting if the distributional environment is assumed;
- If the Riemann-Liouville derivative does not exist, since the integral is divergent, the others give the correct result (17);
3.2. The Constant Function vs. the Heaviside Unit Step
3.3. The Derivatives and the Convolution
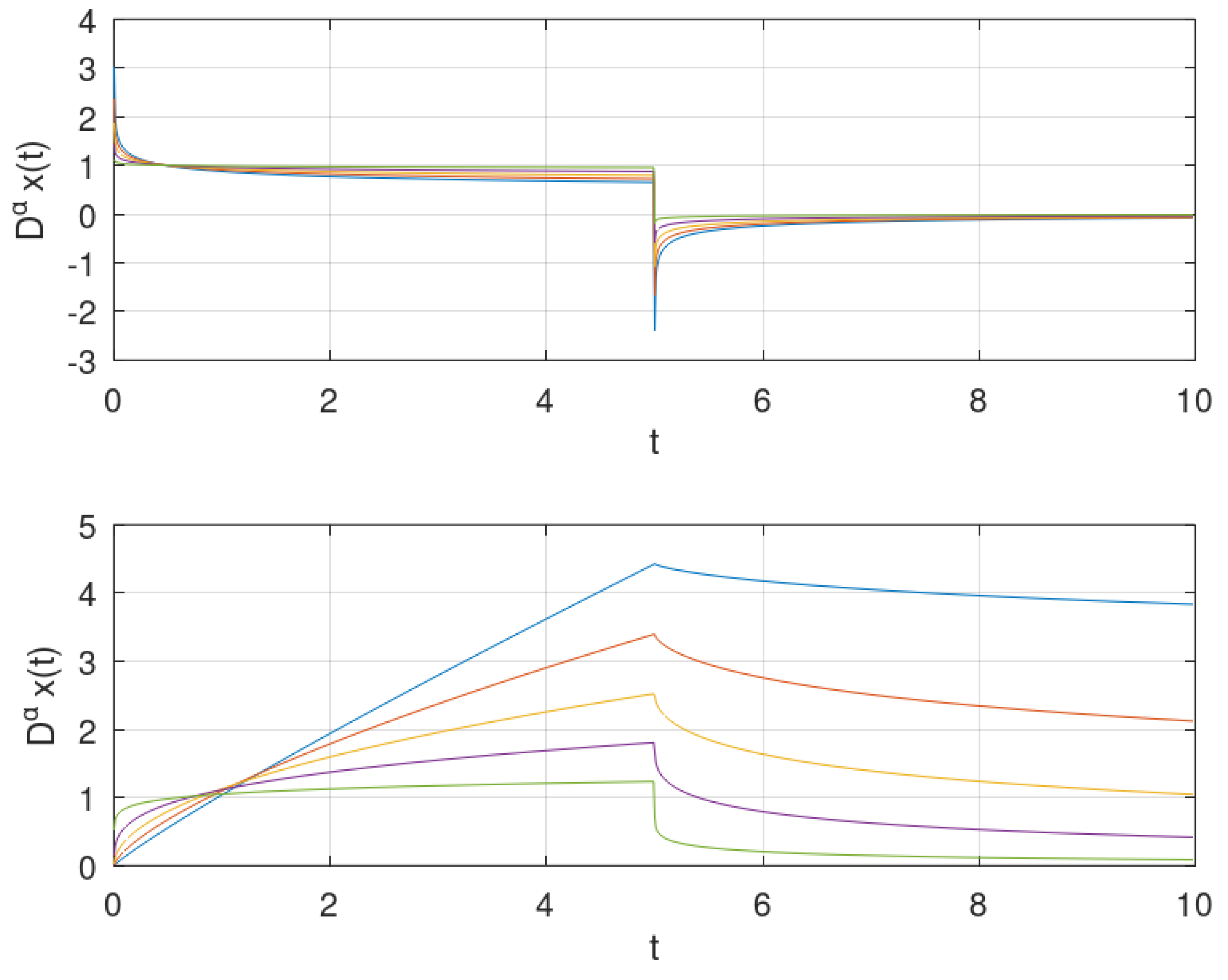
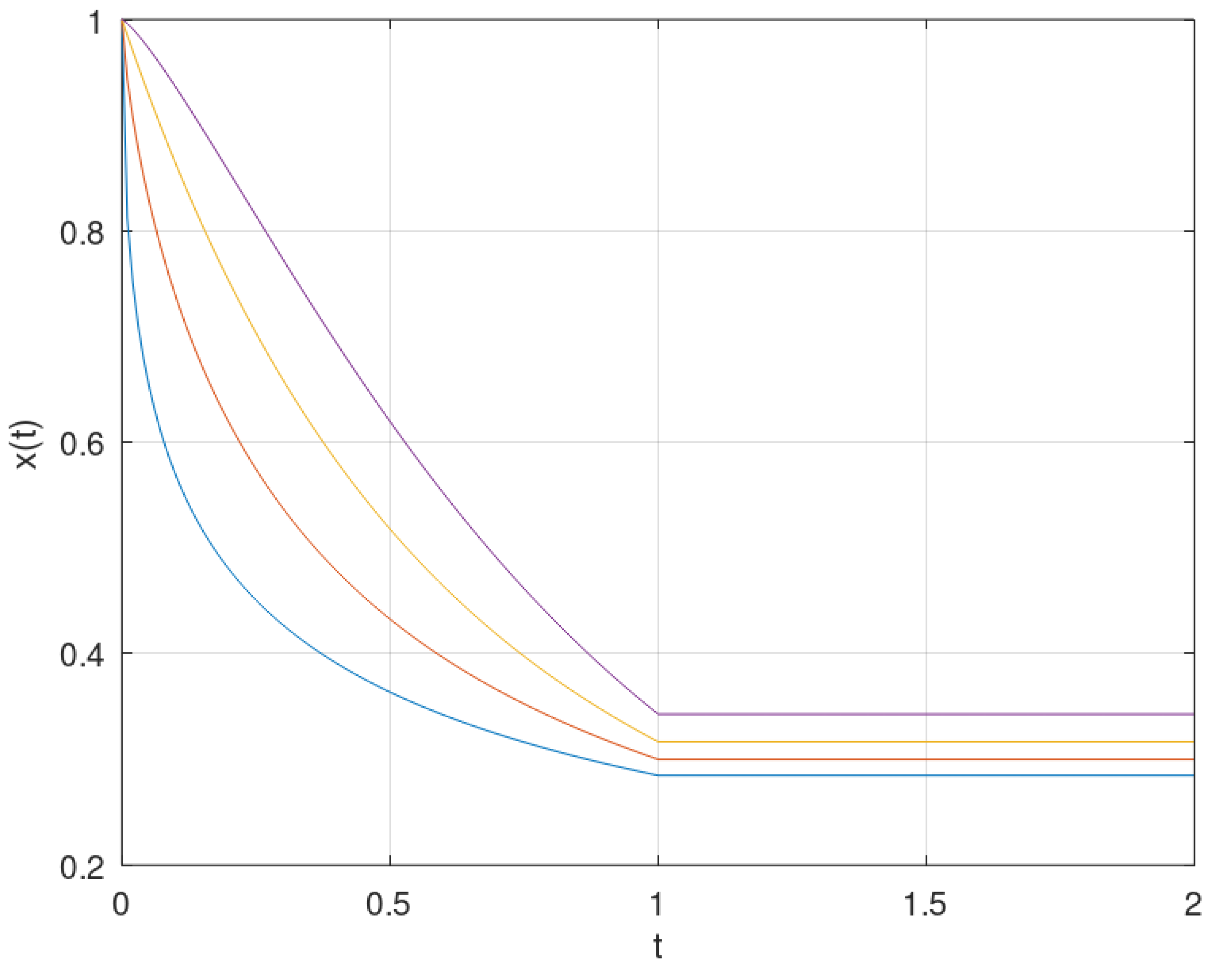
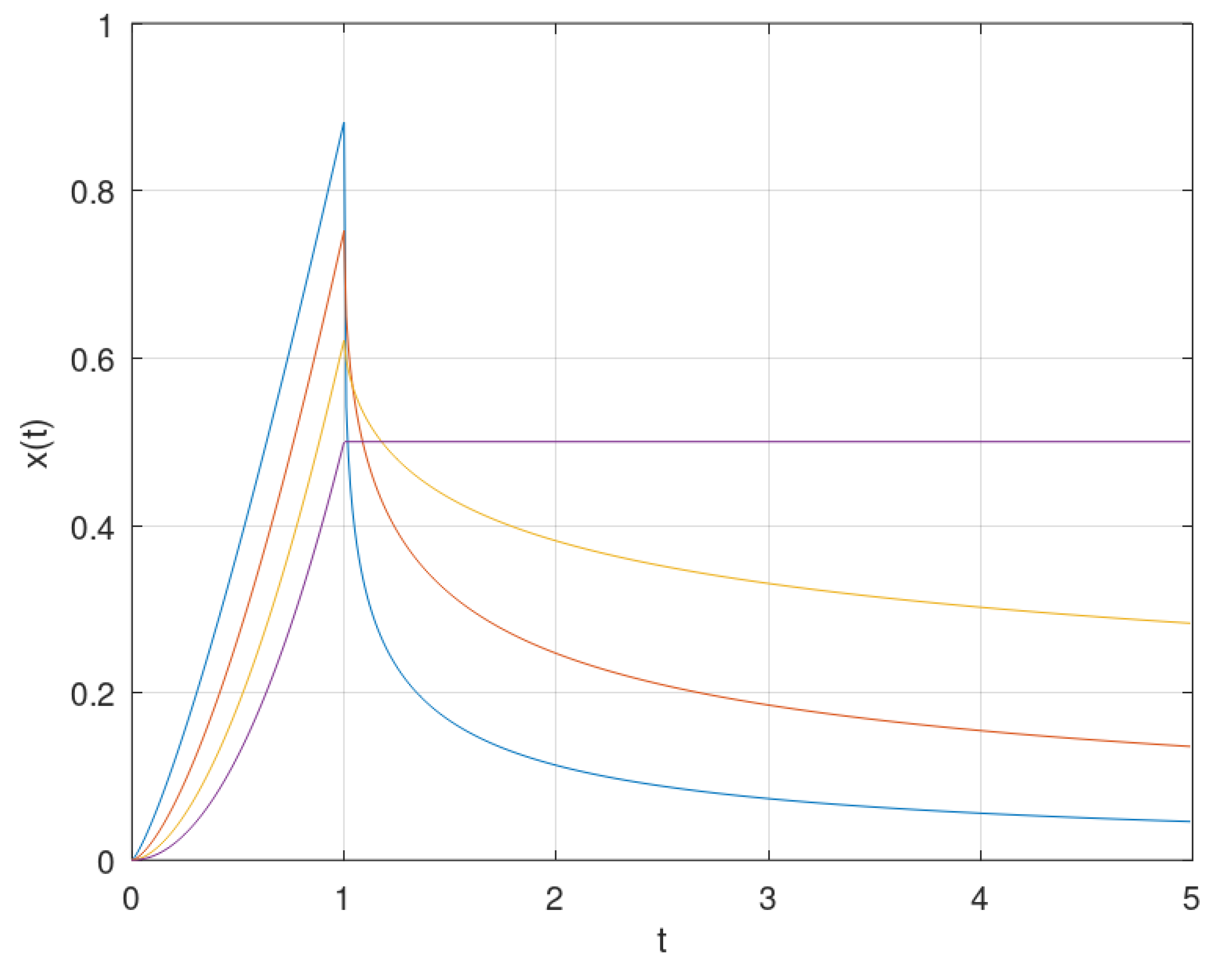
4. Illustrative Examples
4.1. Simple Differential Equations
- Using the LT, we obtain easilywith . As ,So,which leads to
- DirectlyTherefore,
4.2. Concatenated Bounded Continuous Functions
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Petropulu, A.; Moura, J.M.; Ward, R.K.; Argiropoulos, T. Empowering the Growth of Signal Processing: The evolution of the IEEE Signal Processing Society. IEEE Signal Process. Mag. 2023, 40, 14–22. [Google Scholar] [CrossRef]
- Machado, J.T.; Pinto, C.M.; Lopes, A.M. A review on the characterization of signals and systems by power law distributions. Signal Process. 2015, 107, 246–253. [Google Scholar] [CrossRef]
- Wilson, D.P. Mathematics is applied by everyone except applied mathematicians. Appl. Math. Lett. 2009, 22, 636–637. [Google Scholar] [CrossRef]
- Machado, J.T. And I say to myself: “What a fractional world!”. Fract. Calc. Appl. Anal. 2011, 14, 635–654. [Google Scholar] [CrossRef]
- Machado, J.T.; Kiryakova, V.; Mainardi, F. Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1140–1153. [Google Scholar] [CrossRef]
- Machado, J.T.; Galhano, A.M.; Trujillo, J.J. On Development of Fractional Calculus During the Last Fifty Years. Scientometrics 2014, 98, 577–582. [Google Scholar] [CrossRef]
- De Oliveira, E.C.; Tenreiro Machado, J.A. A review of definitions for fractional derivatives and integral. Math. Probl. Eng. 2014, 2014, 238459. [Google Scholar] [CrossRef]
- Machado, J.A.; Kiryakova, V. The Chronicles of Fractional Calculus. Fract. Calc. Appl. Anal. 2017, 20, 307–336. [Google Scholar] [CrossRef]
- Teodoro, G.S.; Machado, J.T.; De Oliveira, E.C. A review of definitions of fractional derivatives and other operators. J. Comput. Phys. 2019, 388, 195–208. [Google Scholar] [CrossRef]
- Rajasekharan, S.R.P.; Gopalan, S.; Jose, S.A. Criteria Analysis of Fractional Derivative for Mathematical Modeling Using CNR Concept. Appl. Math. E-Notes 2024, 24, 520–539. [Google Scholar]
- Valério, D.; Ortigueira, M.D.; Lopes, A.M. How many fractional derivatives are there? Mathematics 2022, 10, 737. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Machado, J.A.T. Fractional Derivatives: The Perspective of System Theory. Mathematics 2019, 7, 150. [Google Scholar] [CrossRef]
- Hilfer, R.; Kleiner, T. Fractional calculus for distributions. Fract. Calc. Appl. Anal. 2024, 27, 2063–2123. [Google Scholar] [CrossRef]
- Ortigueira, M.D. A Factory of Fractional Derivatives. Symmetry 2024, 16, 814. [Google Scholar] [CrossRef]
- Ortigueira, M.D.; Bohannan, G.W. Fractional Scale Calculus: Hadamard vs. Liouville. Fractal Fract. 2023, 7, 296. [Google Scholar] [CrossRef]
- Dugowson, S. Les Différentielles Métaphysiques (Histoire et Philosophie de la Généralisation de L’ordre de Dérivation). Ph.D. Thesis, Université Paris Nord, Villetaneuse, France, 1994. [Google Scholar]
- West, B.J. Fractional Calculus View of Complexity: Tomorrow’s Science; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Ortigueira, M.D. On the “walking dead” derivatives: Riemann-Liouville and Caputo. In Proceedings of the ICFDA’14 International Conference on Fractional Differentiation and Its Applications 2014, Catania, Italy, 23–25 June 2014; IEEE: New York, NY, USA, 2014; pp. 1–4. [Google Scholar]
- Ortigueira, M.D. A new look at the initial condition problem. Mathematics 2022, 10, 1771. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C. Misconceptions in using Riemann-Liouville’s and Caputo’s definitions for the description and initialization of fractional partial differential equations. IFAC-PapersOnLine 2017, 50, 8574–8579. [Google Scholar] [CrossRef]
- Kuroda, L.K.B.; Gomes, A.V.; Tavoni, R.; de Arruda Mancera, P.F.; Varalta, N.; de Figueiredo Camargo, R. Unexpected behavior of Caputo fractional derivative. Comput. Appl. Math. 2017, 36, 1173–1183. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, B. Comparative study of Riemann–Liouville and Caputo derivative definitions in time-domain analysis of fractional-order capacitor. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 2184–2188. [Google Scholar] [CrossRef]
- Balint, A.M.; Balint, S. Mathematical description of the groundwater flow and that of the impurity spread, which use temporal Caputo or Riemann–Liouville fractional partial derivatives, is non-objective. Fractal Fract. 2020, 4, 36. [Google Scholar] [CrossRef]
- Balint, A.M.; Balint, S. The mathematical description of the bulk fluid flow and that of the content impurity dispersion, obtained by replacing integer order temporal derivatives with general temporal Caputo or general temporal Riemann-Liouville fractional order derivatives, are objective. INCAS Bull. 2021, 13, 3–16. [Google Scholar]
- Becerra-Guzmán, G.; Villa-Morales, J. Erroneous Applications of Fractional Calculus: The Catenary as a Prototype. Mathematics 2024, 12, 2148. [Google Scholar] [CrossRef]
- Feng, T.; Chen, Y. A collection of correct fractional calculus for discontinuous functions. In Fractional Calculus and Applied Analysis; Springer: Berlin/Heidelberg, Germany, 2024; pp. 1–17. [Google Scholar]
- González-Santander, J.L.; Mainardi, F. Some Fractional Integral and Derivative Formulas Revisited. Mathematics 2024, 12, 2786. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: San Diego, CA, USA, 1999; pp. 1–3. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Li, C.; Qian, D.; Chen, Y. On Riemann-Liouville and caputo derivatives. Discret. Dyn. Nat. Soc. 2011, 2011, 562494. [Google Scholar] [CrossRef]
- Fec, M.; Zhou, Y.; Wang, J. On the concept and existence of solution for impulsive fractional differential equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3050–3060. [Google Scholar]
- Ortigueira, M.D.; Machado, J.A.T. Revisiting the 1D and 2D Laplace transforms. Mathematics 2020, 8, 1330. [Google Scholar] [CrossRef]
- Hirschman, I.I.; Widder, D.V. The Convolution Transform; Princeton University Press: Princeton, NJ, USA, 1955. [Google Scholar]
- Domínguez, A. A History of the Convolution Operation [Retrospectroscope]. IEEE Pulse 2015, 6, 38–49. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S.; Hamid, S. Signals and Systems, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Roberts, M. Fundamentals of Signals and Systems; McGraw-Hill Science/Engineering/Math: New York, NY, USA, 2007. [Google Scholar]
- Gelfand, I.M.; Shilov, G.P. Generalized Functions; English translation; Academic Press: New York, NY, USA, 1964; Volume 3. [Google Scholar]
- Zemanian, A.H. Distribution Theory and Transform Analysis: An Introduction to Generalized Functions, with Applications; Lecture Notes in Electrical Engineering, 84; Dover Publications: New York, NY, USA, 1987. [Google Scholar]
- Hoskins, R.; Pinto, J. Theories of Generalised Functions: Distributions, Ultradistributions and Other Generalised Functions; Elsevier Science: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Ortigueira, M.D.; Valério, D. Fractional Signals and Systems; De Gruyter: Berlin, Germany; Boston, MA, USA, 2020. [Google Scholar]
- Ortigueira, M.D. Searching for Sonin kernels. Fract. Calc. Appl. Anal. 2024, 27, 2219–2247. [Google Scholar] [CrossRef]
- Liouville, J. Memóire sur quelques questions de Géométrie et de Méchanique, et sur un nouveau genre de calcul pour résoudre ces questions. J. L’École Polytech. Paris 1832, 13, 1–69. [Google Scholar]
- Liouville, J. Memóire sur le calcul des différentielles à indices quelconques. J. L’École Polytech. Paris 1832, 13, 71–162. [Google Scholar]
- Liouville, J. Note sur une formule pour les différentielles à indices quelconques, à l’occasion d’un Mémoire de M. Tortolini. J. Math. Pures Appl. 1855, 20, 115–120. [Google Scholar]
- Post, E.L. Generalized differentiation. Trans. Am. Math. Soc. 1930, 32, 723–781. [Google Scholar] [CrossRef]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Ortigueira, M.D. Fractional Calculus for Scientists and Engineers; Lecture Notes in Electrical Engineering; Springer: Dordrecht, The Netherlands; Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Henrici, P. Applied and Computational Complex Analysis, Volume 3: Discrete Fourier Analysis, Cauchy Integrals, Construction of Conformal Maps, Univalent Functions; John Wiley & Sons: New York, NY, USA, 1993; Volume 41. [Google Scholar]
- Ortigueira, M.D.; Magin, R.L.; Trujillo, J.J.; Velasco, M.P. A real regularised fractional derivative. Signal, Image Video Process. 2012, 6, 351–358. [Google Scholar] [CrossRef]
- Serret, J.A. Mémoire sur l’intégration d’une équation différentielle à l’aide des différentielles à indices quelconques. J. Math. Pures Appl. 1844, 9, 193–216. [Google Scholar]
- Herrmann, R. Fractional Calculus, 3rd ed.; World Scientific: Singapore, 2018. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortigueira, M.D. Fractional Calculus of Piecewise Continuous Functions. Fractal Fract. 2025, 9, 75. https://doi.org/10.3390/fractalfract9020075
Ortigueira MD. Fractional Calculus of Piecewise Continuous Functions. Fractal and Fractional. 2025; 9(2):75. https://doi.org/10.3390/fractalfract9020075
Chicago/Turabian StyleOrtigueira, Manuel Duarte. 2025. "Fractional Calculus of Piecewise Continuous Functions" Fractal and Fractional 9, no. 2: 75. https://doi.org/10.3390/fractalfract9020075
APA StyleOrtigueira, M. D. (2025). Fractional Calculus of Piecewise Continuous Functions. Fractal and Fractional, 9(2), 75. https://doi.org/10.3390/fractalfract9020075