Abstract
We manifest a new method of developing wearable triboelectric band for self-powerd gesture sensing and power generating. Film casting technique, that is easily scalable, was used to patterned soft stretchable elastomers and conductive carbon based composites. The developed triboelectric band showed the capabilities of detecting locomotion of elbow and knee movement and provides electrical signal in response. The rms voltage, current and power of 2.9 V, 0.3 μA and 1.6 μW for elbow stretching, and 1.1 V, 0.11 μA and 0.22 μW for knee stretching was obtained for the optimum load of 10.1 MΩ at operational frequency of 1 ± 0.1 Hz.
1. Introduction
Physiological monitoring using wearable sensors modernized the way of monitoring human activities and health [1,2]. Generally, camera based motion capture system is used in healthcare industry for motion sensing [2], which requires large logistics and is expensive. In addition, the challenges remain to power these sensors to improve the life cycle and to make them more cost effective.
Locomotion is the most critical aspect of human life, such as, the elbows, knees, joints, chest movements. Therefore, Direct motion sensing method could be an alternative potential way to monitor human activities. Triboelectric effect can be utilized to convert these kinetic energies, which is generally wasted in everyday life, to electrical signals. Triboelectric generator (TrEG), that employed contact electrification and electrostatic induction, have been applied for the first time in 2012 to convert mechanical energy to electricity [3]. Large combinations of materials having opposite electron affinity can be used to fabricate such devices. Moreover, such generator can be used to power fast developing low power wearable and consumer electronics, that includes medical device, activity monitoring sensors to fashion accessories.
In recent time, several wearable triboelectric generators have been reported [4,5,6]. However, their conformations, selection of materials and manufacturing methods varied and not suitable for scalability due requirement of special processing techniques and vacuum based manufacturing. Lately, film casting based triboelectric generator was introduced [7], where stretchable conductive fabric laminated on polydimethylsiloxane (PDMS) was used as stretchable electrode and inter layer was made of non-stretchable polyurethane (PU) composite.
During this work, fully film casted, elastomeric and stretchable materials based self-powered triboelectric body motion sensor is developed. Use of all stretchable soft elastomer provide comport for user, and the manufacturing process is easily scalable. The developed stretchable bend shows the detection capability and energy harvesting potentials for different body joint motions.
2. Experimental Procedure
2.1. Design
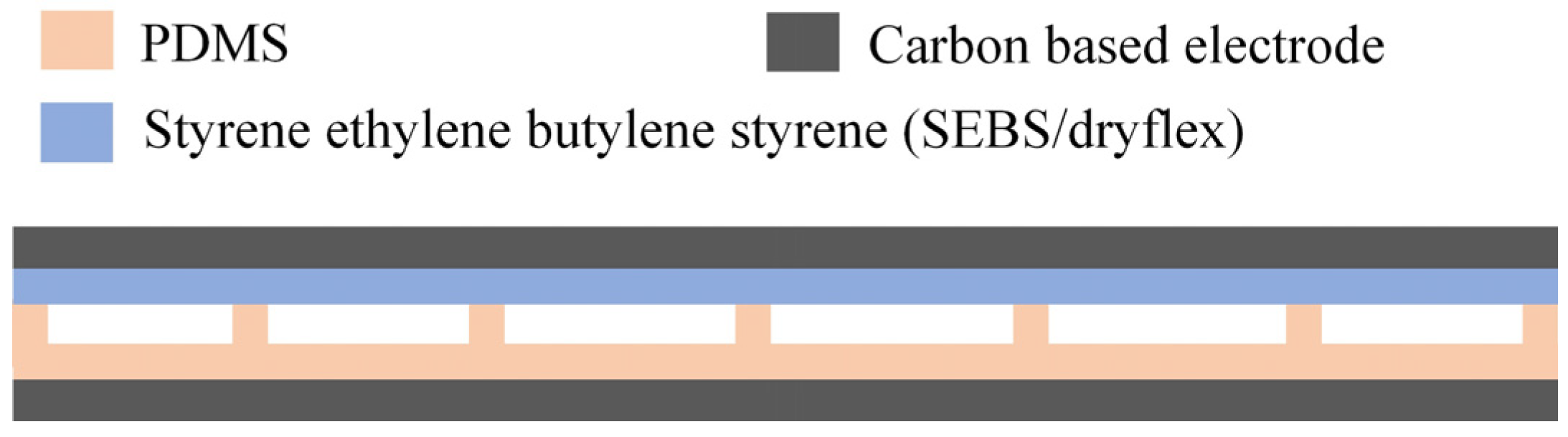
The newly developed stretchable TrEG used vertical-contact separation mechanism as an operation principle. Figure 1 presents the schematic diagram of the fully stretchbale TrEG. As observed, design of the device consist of two triboelectric material layers with electrodes deposited on them. The functional layer were placed facing one another separated by casted spacer. The physical parameters of TrEG is tabulated in Table 1.
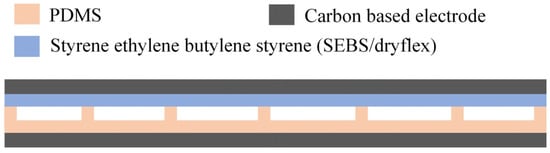
Figure 1.
Schematic diagram of the design of fully stretchable triboelectric generator.

Table 1.
Dimensions of the fully film casted and stretchable TrEGs.
2.2. Materials
PDMS and styrene ethylene butylene styrene (SEBS/Dryflex) were used as triboelectric elastomeric materials due to their high stretchability, softness and diffent electron affinities. PDMS (Sylgard 186) was purchased from DowCorning (Midland, MI, USA), HEXPOL TPE Ltd., (Manchester, UK), provides Dryflex. Electrodes composites were prepared using Ketjenblack EC-600JD carbon black pellets, which was purchased from Akzo-Nobel, Amsterdam, The Netherlands. Solvents were supplied by Sigma-Aldrich. Polyethylene terephthalate (PET, Melinex ST506) foil was purchesed from DuPont, Wilmington, DE, USA. All products were used as received.
2.3. Process Flow
Development of the fully stretchable materials baed film casted TrEG composed of film casting of both PDMS and Dryflex thin films on PET substrates. Followed by film casting of carbon based conductive composite layers. Film casting process is performed on PET substrate with sacrificial layers deposited on them. Thereafter, PDMS pillers having height of 1.5 mm were casted on PDMS layer at periodic distances. These PDMS pillers act as spacer during operation. Finally, Two triboelectric functional layers were assembled as showed in Figure 1. Top view of the photograph of the stretchable TrEG is given in Figure 2.
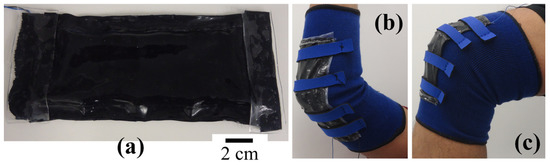
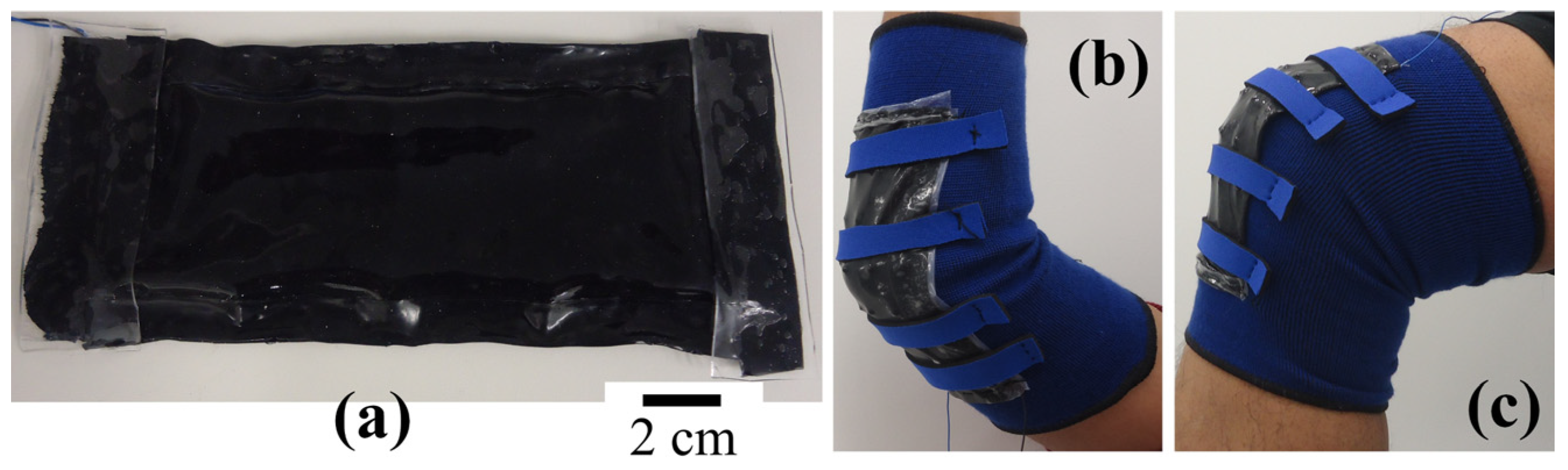
Figure 2.
Photoghraph of (a) top view of device; (b) TrEG mounted on elbow; and (c) on knee.
2.4. Characterizations
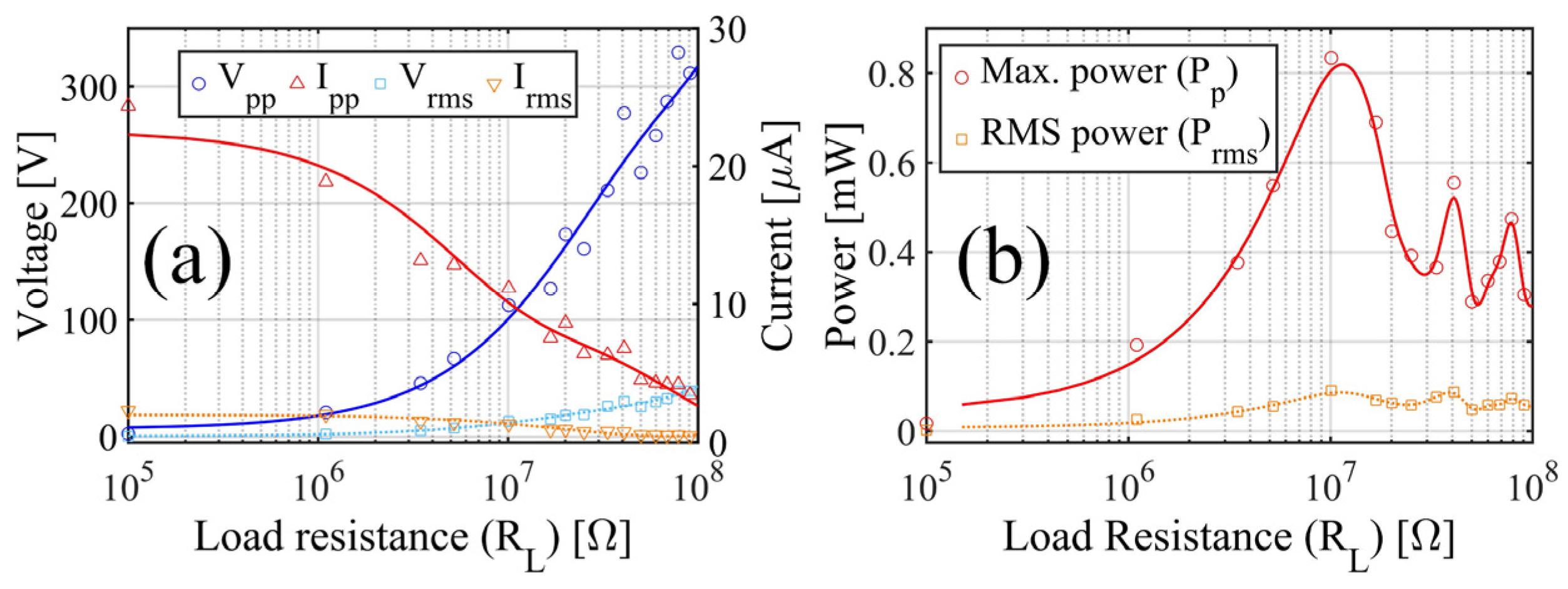
The stretchable TrEG were initially characterized using tapping motion to identify the optimum load resistance () of the system at operational frequency of 1 ± 0.1 Hz. The open circuit voltage () and maximum current outputs were performed across of 10 GΩ and 10 kΩ, respectively. For the varying , the voltage, current and corresponding output power were examined. Once the optimum is knows, the device was tested on elbow and knee joint while arm and leg stretching gestures for optimum load. At the end, TrEG was connected to capacitor via bridge rectifier to measure the amount of charges transferred and the energy stored was measured.
3. Results and Discussion
As the device implements vertical contact separation principle. The harmonic mechanical deformation brought two functional layers into physical contact with one another periodically and thus produced AC electrical signal. While tapping operation, the peak-to-peak open circuit voltage of 399.9 V (rms value of 98 V), and peak-to-peak maximum current output of 19.8 μA (rms value of 3.1 μA). The maximum peak power output of 833.3 μW (rms value of 90.7 μW) was obtained for the optimum load resistance of 10.1 MΩ, as presented in Figure 3.
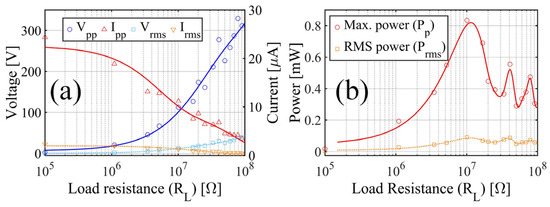
Figure 3.
Electrical response of stretchable TrEG with respect to (a) output voltage and current; and (b) corresponding power output for tapping motion.
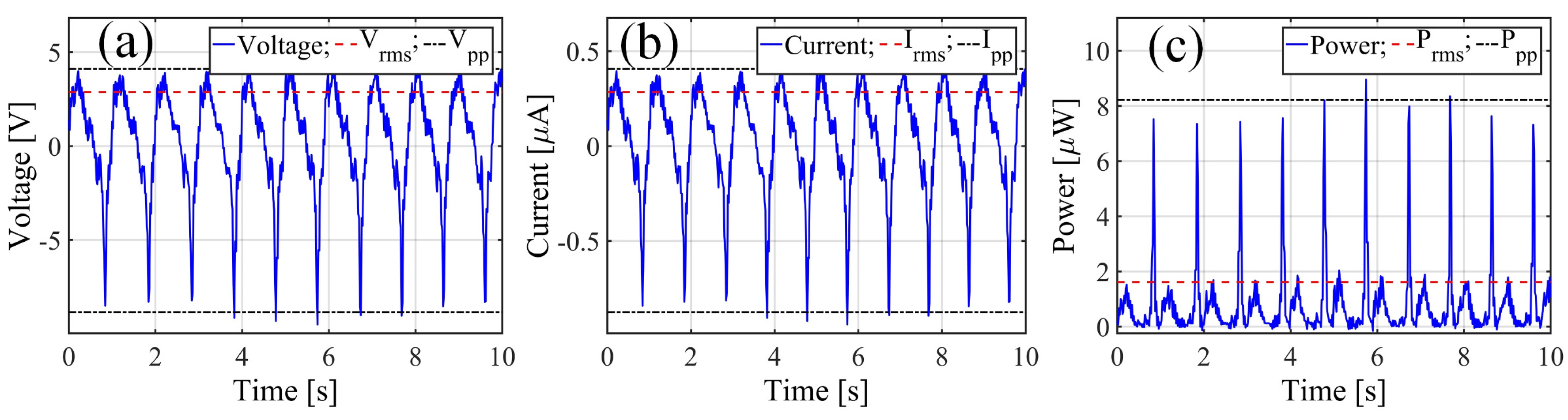
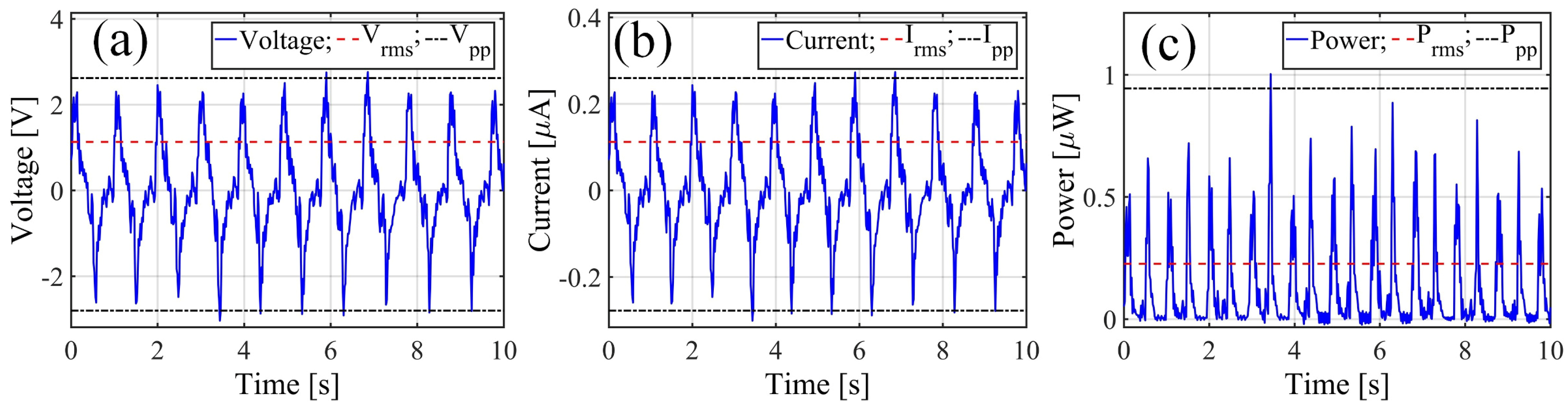
Afterwards, system was test on elbow and knee, as showed in Figure 2b,c. While elbow banding and stretching deformed the device, the output voltage, current and resulting power are illustrated in Figure 4. Triboelectric band provided voltage, current and corresponding power peak-to-peak value of 13 V, 1.3 μA and 8.2 μW, and rms value of 2.9 V, 0.3 μA and 1.6 μW for RL of 10.1 MΩ. The peak-to-peak voltage, current and power output of the 5.4 V (rms value of 1.1 V), 0.54 μA (rms value of 0.1 μA) and 0.94 μW (rms value of 0.23 μW) was obtained for the RL of 10.1 MΩ for knee joint stretching and banding movement (Figure 5). Each single peak represent individual joint motion. Therefore, the system acts as motion sensing device.
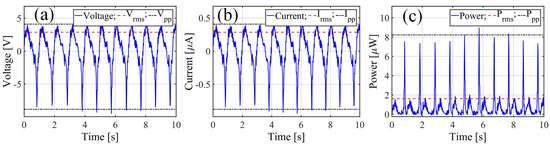
Figure 4.
Output responses of the Stretchable TrEG while elbow motion (a) voltage, (b) current and (c) corresponding power for RL of 10.1 MΩ.
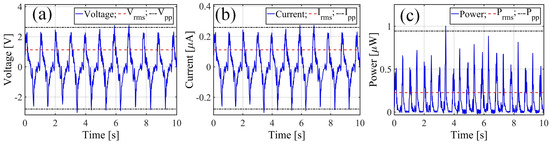
Figure 5.
Output responses of the Stretchable TrEG while knee motion (a) voltage; (b) current and (c) corresponding power for RL of 10.1 MΩ.
As observed, the elbow bending provide higher electrical responses than the knee bending due to higher bending angle of the elbow for the sample. Moreover, the stretchable TrEG was connected to capacitor having capacitance of 2.2 μF for the cyclic motion of elbow and knee joint. The amount of charges transferred and energy stored of 269 ± 11 nC/cycle and 16.5 ± 1.4 nJ/cycle, respectively, for elbow motion, and 58.1 ± 2.2 nC/cycle and 0.8 ± 0.06 nJ/cycle, respectively, for knee movement was obtained.
4. Conclusions
As presented, triboelectric effect can be used to detect the human locomotion and thus can be employed as physiological motion detector. The TrEG was developed from stretchable materials, namely, PDMS and Dryflex, and carbon based composites were used as electrode. Film casting method was used during the processing, which is simple and easily scalable for large area applications. The use of soft materials made the band mode adaptive on the body surface topography and provide better comfort. Initial characterization while tapping showed that optimized performance was obtained for the of 10.1 MΩ. Arm stretching gesture for the of 10.1 MΩ, provide peak-to-peak output voltage (), peak power () of 13 V and 8.2 μW, respectively, and for knee stretching motion of 5.4 V and of 0.94 μW were detected for the operational frequency of 1 ± 0.1 Hz. Therefore, the developed stretchable TrEG acts as self-powered motion sensor and provide different electrical responses for different body joint motions.
Although, the fully stretchable TrEG performed as motion sensor, there are still room to modifies the design so that while stretchable and bending of the device more energy is produced.
Acknowledgments
The authors would like to acknowledge Swiss National Science Foundation (SNSF) and NanoTera.ch for the funding and support of this work within the framework of BodyPowerSenSE project.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Appelboom, G.; Camacho, E.; Abraham, M.E.; Bruce, S.S.; Duont, E.L.P.; Zacharia, B.E.; D’Amico, R.; Slomian, J.; Reginster, J.Y.; Bruyère, O.; et al. Smart wearable body sensors for patient self-assessment and monitoring. Arch. Public Health 2014, 72, 28. [Google Scholar] [CrossRef] [PubMed]
- Zeng, H.; Zhao, Y. Sensing Movement: Microsensors for Body Motion Measurement. Sensors 2011, 11, 638–660. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in Triboelectric Nanogenerators as a New Energy Technology and Self-Powered Sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Kim, K.N.; Chun, J.; Kim, J.W.; Lee, K.Y.; Park, J.-U.; Kim, S.-W.; Wang, Z.L.; Baik, J.M. Highly Stretchable 2D Fabrics for Wearable Triboelectric Nanogenerator under Harsh Environments. ACS Nano 2015, 9, 6394–6400. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Meng, B.; Zhang, X.; Han, M.; Su, Z.; Zhang, H. Wearable Electrode-Free Triboelectric Generator for Harvesting Biomechanical Energy. Nano Energy 2015, 12, 19–25. [Google Scholar] [CrossRef]
- Cui, N.; Liu, J.; Gu, L.; Bai, S.; Chen, X.; Qin, Y. Wearable Triboelectric Generator for Powering the Portable Electronic Devices. ACS Appl. Mater. Interfaces 2015, 7, 18225–18230. [Google Scholar] [CrossRef] [PubMed]
- Haque, R.I.; Farine, P.-A.; Briand, D. Electrically conductive fabric based stretchable triboelectric energy harvester. J. Phys. Conf. Ser. 2016, 773, 012005. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).