1. Introduction
To obtain real-time multi-parametric information about the physical and anatomic conditions of affected tissues during MIS operation is a crucial need regarding the precision and safety of these interventions [
1]. Our goal was to develop a novel laparoscope for surgery robots with integrated 3D force and tactile sensors to provide tactile information about the different organs and tissues touched.
2. Materials and Methods
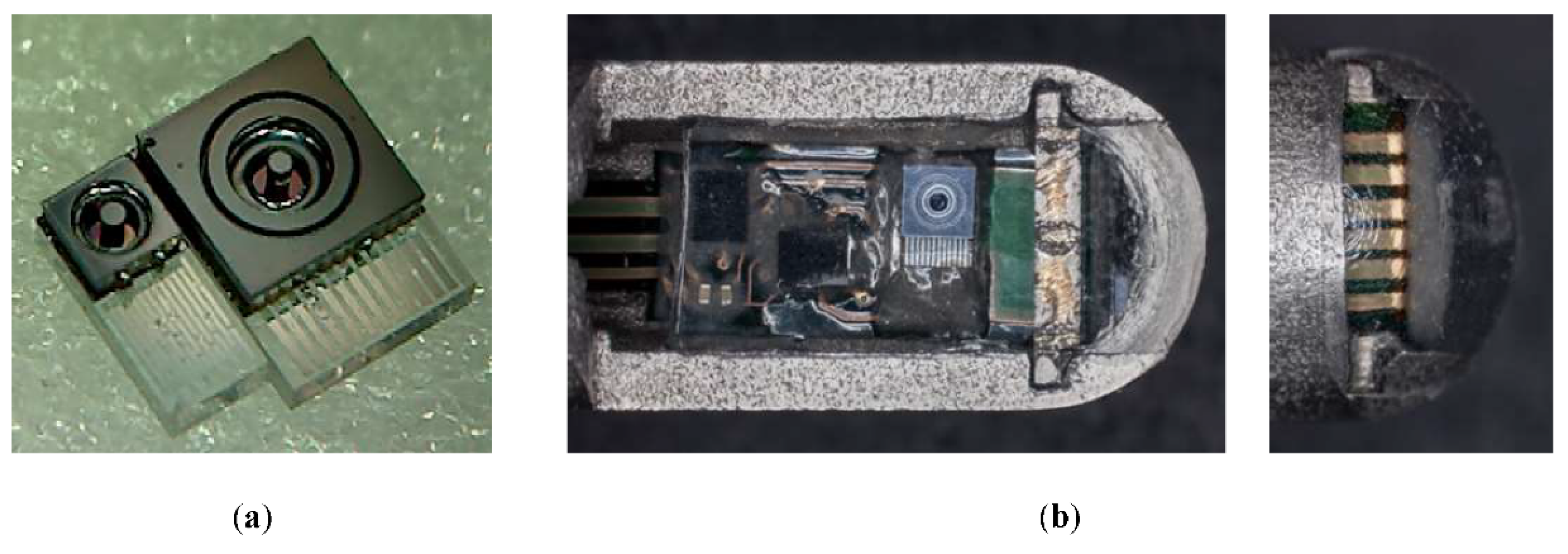
Piezoresistive vectorial force sensors were designed according to the proposed force ranges and manufactured by 3D bulk micromachining technology [
2]. Two different MEMS sensors were electromechanically integrated into a metal laparoscope tweezers together with the pre-processing electronics performing the analogue-digital data conversion and the communication towards the robot control system (
Figure 1).
According to the proposed medical application and functional requirements the sensors were embedded in biocompatible elastic polymer.
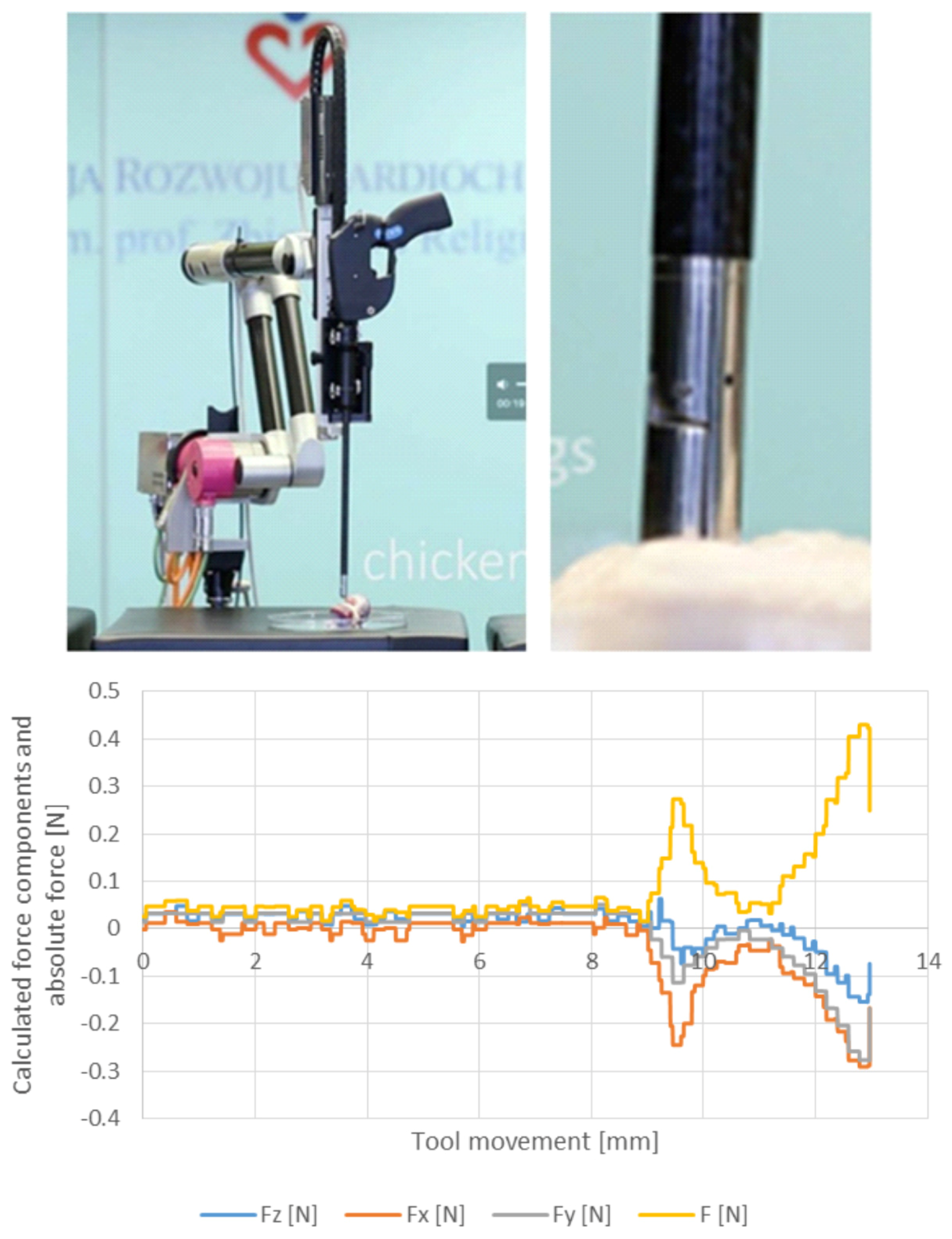
Tissue hardness measurements were performed using real animal tissue perpendicularly touched with the gripper. The signals of the tip tactile sensor were collected and analysed versus a constant straight forward movement of the laparoscope (
Figure 2).
The measured force values clearly indicate the contact point and the mechanical characteristics of the tissue. When pressing the soft muscle a continuous increase of force was detected starting with a slight slope. When the hard bone is pressed, remarkable higher slope is found directly from the starting point. The characteristics of the force signals given by the different tissues provide the possibility to distinguish tissue types.
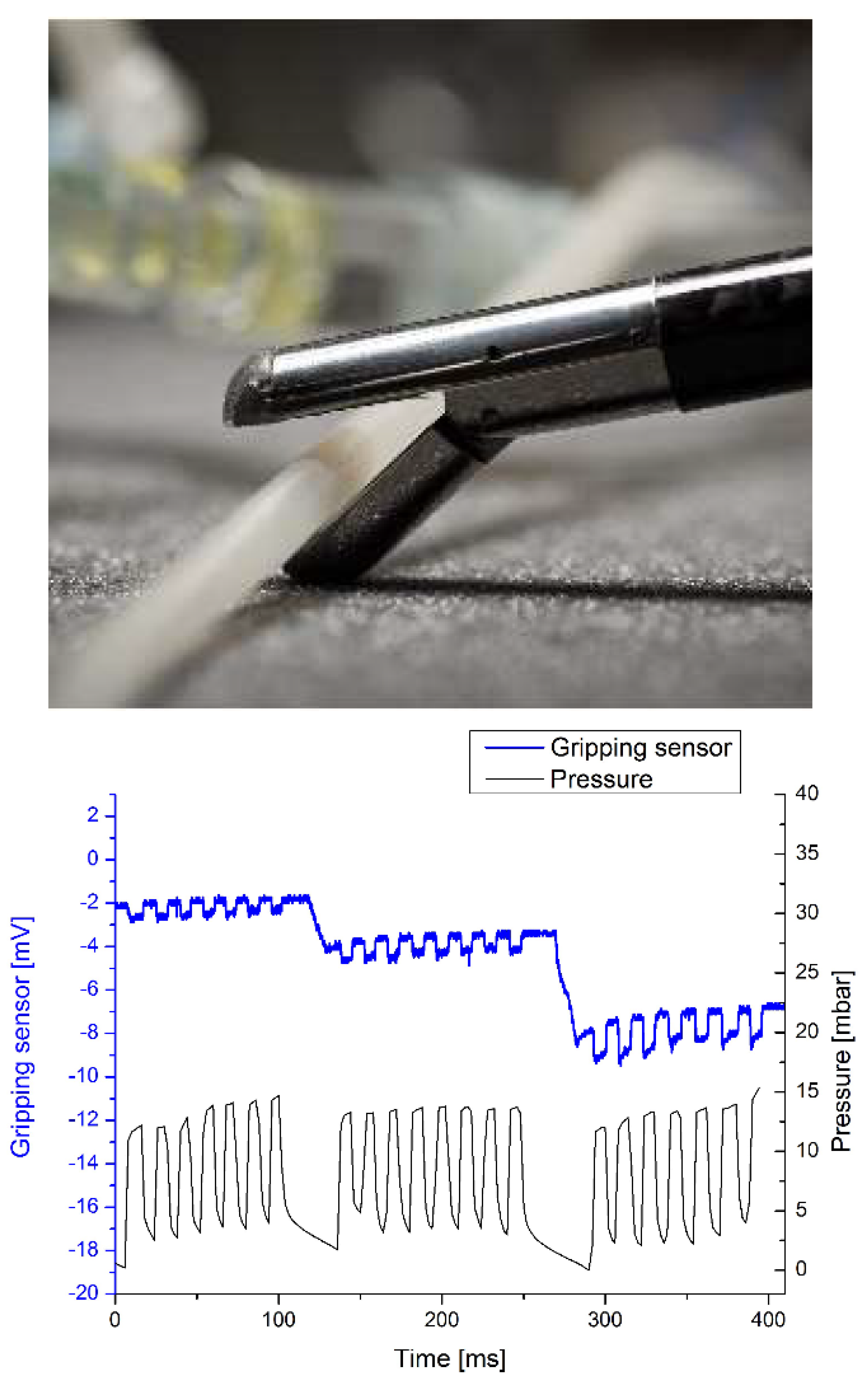
A simple setup was constructed to mimic blood vessel and check whether the sensor built in the grasper is able to identify an artery by measuring the pulses. A silicone tube was grasped and the signals of the force sensor were collected together with the respective signals of the pressure sensor while the microfluidic pump was operating in pulsed mode.
Figure 3 demonstrates that the sensitivity of the measurement depends on the preset clamping force, as expected considering the blood pressure measurement protocol.
3. Results and Conclusion
A surgical gripper with embedded force and tactile sensors and readout electronic circuit was developed. MEMS sensors, the near-chip signal pre-processing, the digital communication electronics as well as the substantial electrical and mechanical packaging technique was elaborated. The accomplished smart laparoscope was integrated with the ROBIN HEART surgery robot system. The functionality of the sensor system was validated by biomechanical tests, performing tissue stiffness characterisation and blood pressure measurement.
Author Contributions
J.R., C.D., P.F., I.B. and P.F. designed and developed the 3D force sensors, designed the readout electronics, performed the blood pressure measurements and took part in the biomechanical tests, G.S. designed and performed the metal gripper and the polymer coating, H.S. designed the flexible PCB, L.M., K.L., W.S., D.K., P.K., Z.M. and Z.N. conceived, designed and developed the surgical robotic system with the laparoscope and provided the environment of biomechanical tests and took part the experiments. All authors participated in the system integration.
Acknowledgments
This work was done in the frame of the ENIAC “INCITE” project No. 621278 partially financed by the ENIAC JU and the National Research, Development and Innovation Fund (NKFIA) via NEMZ_12-1-2014-0005 grant. János Radó is supported by the ÚNKP-17-3-I-OE-779/47 New National Excellence Program of the Ministry of Human Capacities. Gábor Szebényi acknowledges the financial support received through János Bolyai Scholarship of the Hungarian Academy of Sciences. Special thanks to Attila Nagy for his help in assembly of devices.
Conflicts of Interest
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
References
- Nawrat, Z. State of the art in medical robotics in Poland: Development of the Robin Heart and other robots. Expert Rev. Med. Devices 2012, 9, 353–359. [Google Scholar] [CrossRef] [PubMed]
- Radó, J.; Dücső, C.; Földesy, P.; Szebényi, G.; Nawrat, Z.; Rohr, K.; Fürjes, P. 3D force sensors for laparoscopic surgery tool. Microsyst. Technol. 2017, 24, 519–525. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).

 ,
, {kind=link}
{kind=link}
{kind=link}


