1. Introduction
Accelerometer and/or inertial sensors consisting of an accelerometer, gyroscope and magnetometer have been widely used for monitoring human activities due to the ease of its wearable characteristics. Wearable inertial measurement units (IMUs) have been used for measuring human motion especially walking, running and chair standing [
1,
2,
3]. In addition, IMUs were also utilized in calculating energy expenditure with a motion classification algorithm [
4,
5].
IMUs technique are also employed in underwater activities. Ohgi et al. [
6] reported a classification model for swimming techniques based on acceleration data from the swimmer’s chest. The usability of IMUs in swimming is also described in the other studies [
7]. Fantozzi et al. [
8] reported three-dimensional kinematic characteristics during walking in water (WW). A calculation model of energy expenditure during WW was suggested from an accelerometer attached to the head [
9,
10]. The usability of IMUs has spread from land-based activities to now include water-based activities.
Water-based activities have become increasingly popular for recovery from sport, and rehabilitation from injury. The higher water density; about 800 times greater than the air; influences both buoyancy and viscosity and alters human movement during water exercise. For example, exercising in water condition alters body movement due to increased buoyancy and increased resistance and muscle stress due to the water viscosity [
11]. The water condition also provides increased safety during exercise due to reduced risk of falls and injury [
12,
13].
While there are some studies reporting the usefulness of IMUs in water-based activity, an investigation of classifying motion during water-based activities has not yet been reported. Therefore, this study aimed to classify motions of typical daily activities such as walking, chair standing/sitting and step climbing on-land and in-water conditions using IMUs and comparing the exercise condition and the influence of the sensor position to determine better place to attach the sensors.
2. Methods
2.1. Subjects
Fourteen males (age: 28.4 ± 7.0 years, height: 181.1 ± 6.7 cm and weight: 78.0 ± 8.8 kg) and ten females (age: 31.4 ± 7.7 years, height: 172.1 ± 5.5 cm and weight 65.0 ± 7.8 kg) were recruited. No previous injury or trauma were reported prior to participation in this study. All subjects provided informed consent before the experiment. This study was approved by the Human Research Ethics Committee at the University of the Sunshine Coast.
2.2. Exercise
The subjects conducted the following three activities; about 7 m walking, 40 cm chair seat height standing and sitting, and 20 cm height stair climbing. Each exercise was conducted three times both in water and on land conditions. The subjects stood and sat to the chair at least three times for chair standing and sitting exercise. For the stair climbing exercise, the subjects conducted three steps with the first step being made by right leg. The water depth was 1.35 m for walking and stair climbing, and 85 cm for the chair standing and sitting exercise. The land exercises were conducted on the surrounding concrete pool deck.
2.3. Data Collection
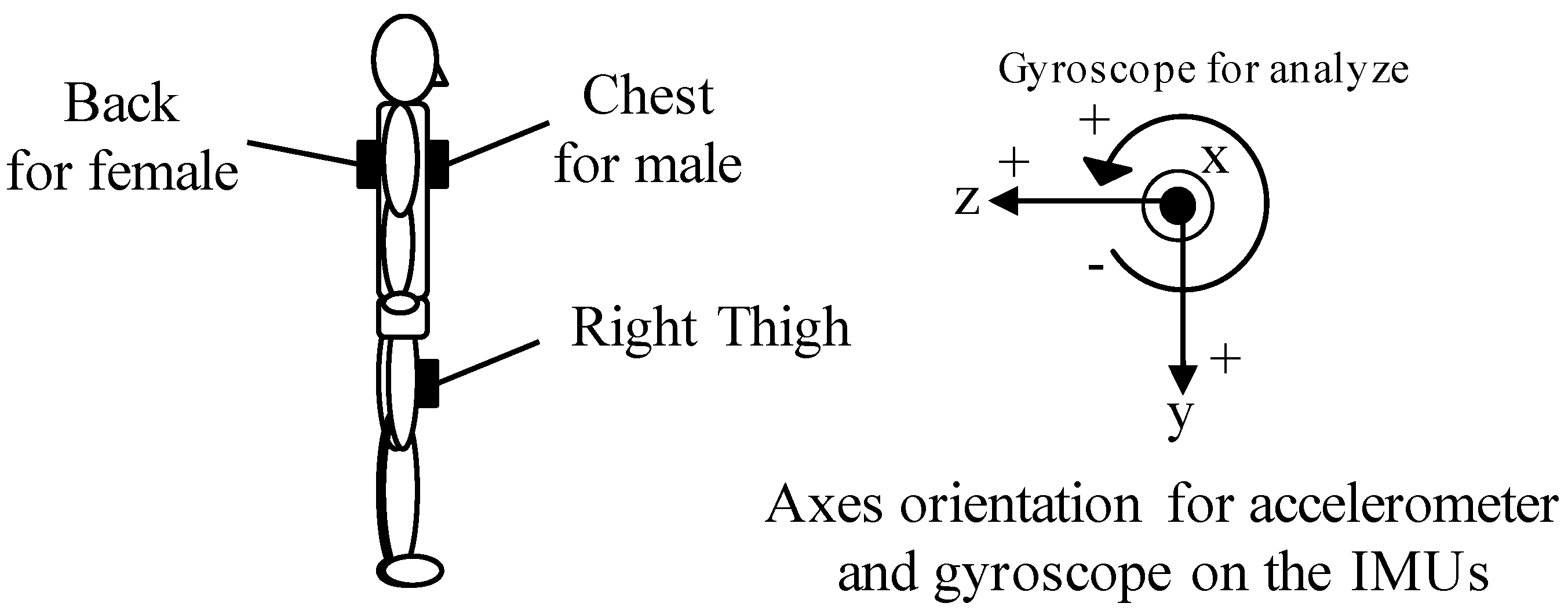
An IMU (LP-WS0904, 9DoF Wireless Motion Logger, Logical Product Co., Fukuoka, Japan) was attached on the subject’s chest for male or back for female and the subject’s front-side of the right thigh (
Figure 1).
Each IMU contained a tri-axial accelerometer and gyroscope. The data was sampled at 100 Hz. The maximum range was ±5 g for the accelerometer, and ±300°/s for the gyroscope.
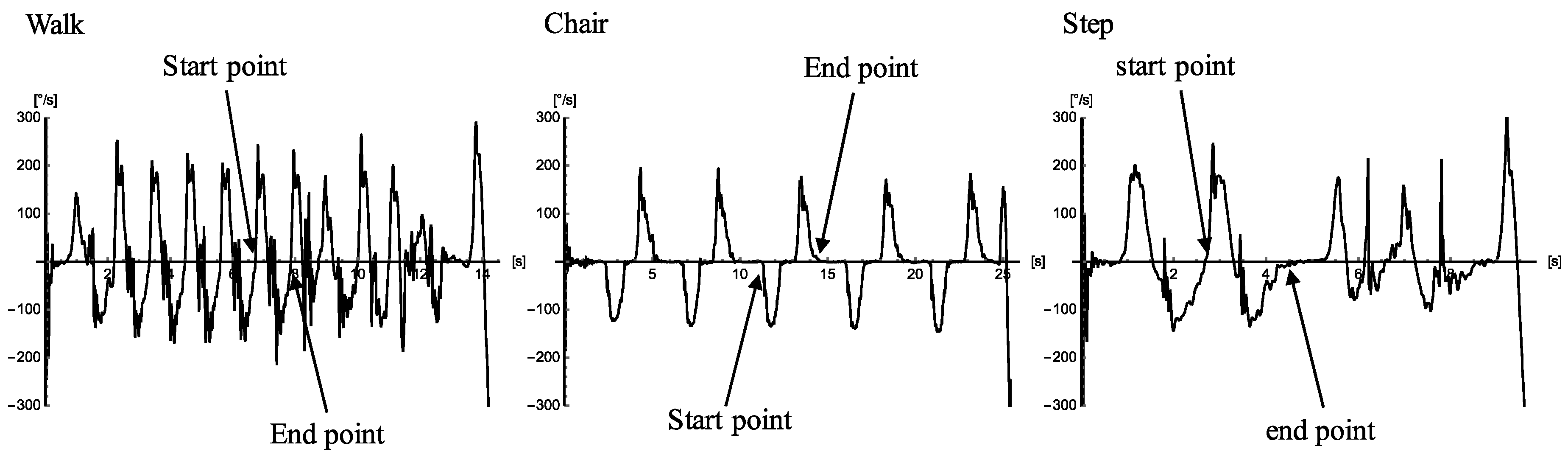
The chest and thigh acceleration data were extracted based on the angular velocity data of frontal axis (sagittal plane) obtained from subject’s thigh IMU. The cut off value of the angular velocity data was set at ±5°/s [
3] (
Figure 2). One full cycle of each motion was extracted for analysis; one full step cycle of the walking motion, one full cycle from start of standing to the end of sitting for chair exercise, and one full gait cycle from the start to the end of the right thigh movement for step climbing. In this study, the data of the second and third trials were used for analysis.
2.4. Data Analysis
Following data collection, a mean, variance and skewness for each acceleration axis were calculated (
Figure 3). In total, 21 subjects × 3 exercises × 2 trials = 126 samples of chest data sets and 24 subjects × 3 exercises × 2 trials = 144 samples of thigh data sets were obtained for analysis in each condition, respectively.
The calculated mean, variance and skewness data were adopted as input parameters for classification analysis for each condition. The classification analysis was made by WEKA (Waikato Environment for Knowledge Analysis, The University of Waikato, Hamilton, New Zealand) 3-6-13. The decision tree classification algorithm of C4.5, which is implemented in J48 classification function, was used. A 10th-fold cross validation model was adopted in its calculation. In addition, the neural network, which is implemented in multilayer perceptron classification function, was used. A 10th-fold cross validation model was adopted. A number of node, a learning rate, a coefficient of moment and a number of iteration were set at 6 ((input + output)/2), 0.3, 0.2 and 500 in a single hidden layer, respectively. These consecutive calculation processes were referred to the previous study [
6].
3. Results
The details of the classification in each condition and position were expressed in
Table 1 for the decision tree and neural network.
For the chest data, the decision tree classification algorithm correctly classified 79.4% in the water-based activities, and 89.7% of the land-based. Whilst the thigh sensor correctly classified 97.2% and 97.9% of water- and land-based activities, respectively.
Figure 4a–d depicted the decision tree structure delivered by WEKA 3-6-13 in each condition and position. In the chest or back results, there was no mean parameter used in the water condition although the mean parameter of frontal axis (Mean-x) was used at the lower level on the land condition. The result of the thigh was very simple. Only the mean parameter of anterior-posterior and longitudinal axes (Mean-z and Mean-y) was used in the water condition, furthermore, only the mean parameter of longitudinal axis (Mean-y) was used on the land condition.
The neural network classification algorithm correctly classified 83.3% in the water-based activities, and 93.7% of the land-based for the chest data. In the thigh data, 99.3% was correctly classified in water-based activities, and 100% was attained on land-based.
4. Discussion
This study measured the chest or back and thigh acceleration in three-dimensions during typical daily life activities such as walking, chair standing/sitting and step climbing on-land and in-water conditions using IMUs. Mean, variance and skewness of extracted acceleration with reference to the thigh angular velocity were then calculated. Furthermore, this study classified the three activities by applying the decision tree and neural network classification algorithm each in-water and on-land. As a result, the classification percentages were considerably high in both conditions and IMUs positions. The classification percentages were slightly lower in-water condition than on-land in both positions. This may be due to the slower motion in-water condition because of the water viscosity, which resulted in lower acceleration in-water condition than on-land. This was more noticeable for walking and step climbing in-water condition at the chest or back position. Namely, the upper body motion of these two activities in-water condition would be similar.
Ohgi et al. [
6] reported 91.1% of the classification percentage by decision tree algorithm for classifying four types swimming stroke from the chest acceleration data. In this study, the classification percentage of the thigh IMUs data were higher than the previous study although the chest IMUs data were lower. In addition, this study used gyroscope data from the thigh IMU for extracting the acceleration data for analysis. This would suggest better value of the thigh attached IMU data than the chest attached IMU for monitoring and classifying daily life activities both in-water and on-land condition.
The current study adopted ±5°/s cut off value for extracting the acceleration data in each motion, and then, calculated mean, variance and skewness values. However, there was no parameter for the skewness in the result of decision tree classification. The chest or back IMUs data used mostly variance on-land condition and variance-y and variance-z in-water condition. Furthermore, there was only mean parameter on-land (mean-y) and in-water (mean-y and mean-z) conditions. To simplify the input data and classification strain, it could be said that it is enough to calculate variance and mean values of three axes for monitoring and classifying the daily life activities using an upper body attached accelerometer. We believe it may be better to calculate mean values of anterior-posterior and longitudinal axes of thigh attached accelerometer. When developing a monitoring and classifying system for daily life activities in-water condition, the system would demand anterior- posterior and longitudinal axes accelerometer and frontal axis (sagittal plane) gyroscope for thigh segment. This would also be applicable for on-land condition because the necessity is longitudinal axes accelerometer and frontal axis gyroscope. Therefore, this study can suggest the needs are 1-the IMU containing two-dimensional accelerometer and single gyroscope, 2-the IMU attachment of thigh, and 3-the calculation of mean and variance of acceleration data with ±5°/s algorithm for monitoring and classifying daily life activities both in-water and on-land condition.
As a limitation of this study, the analysis was conducted for only one cycle of each exercise. It is uncertain if similar results would be obtained if the exercise was conducted continuously across more than one cycle. Further, this study involved only IMU data. When considering the development of an exercise monitoring system for water in the future, a validity of the IMU data may also be of value. Furthermore, this study cannot determine if the subject is in-water or on-land. The algorithm should be configured to classify the condition of the exercise environment. Further studies may be needed to develop the underwater exercise monitoring system in the future.
5. Conclusions
From the results and discussion, this study can conclude that 1-the motion of upper body would be very similar between walking and step climbing in water-based condition, 2-attaching IMU at the thigh would be able to attain better classification than chest attached IMU during exercise in daily life activities both water- and land-based condition, 3-the anterior-posterior plus longitudinal axes accelerometers and frontal axis (sagittal plane) gyroscope at the thigh are enough for monitoring and classifying exercises in both conditions, 4-more than one cycle motion investigation may provide increased value.







{kind=link}
{kind=link}
{kind=link}
{kind=link}