Development of an Archery Robot for the Selection of Arrows †

Abstract
:1. Introduction
2. Development of Second Shooting Machine
2.1. Base Part
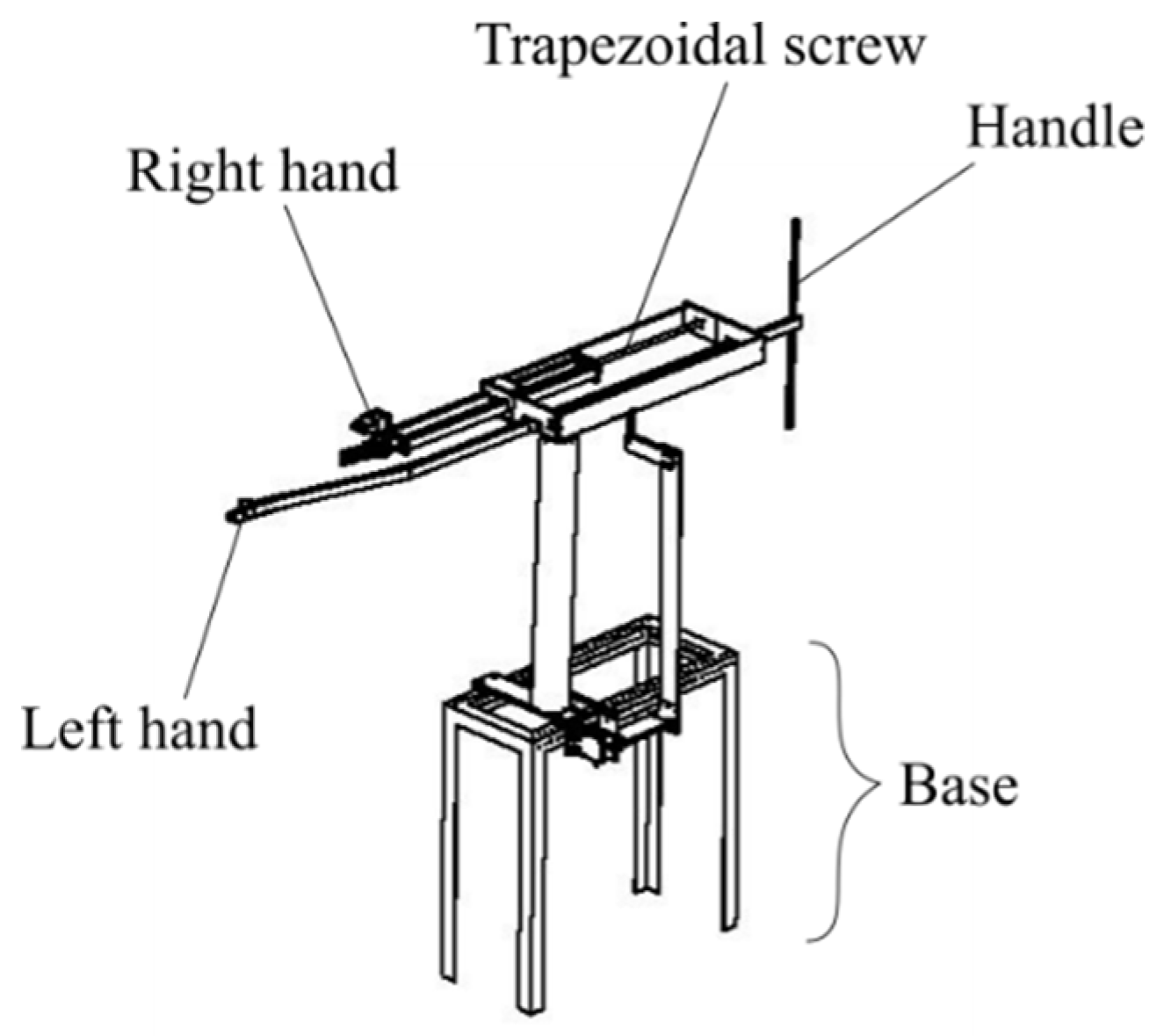
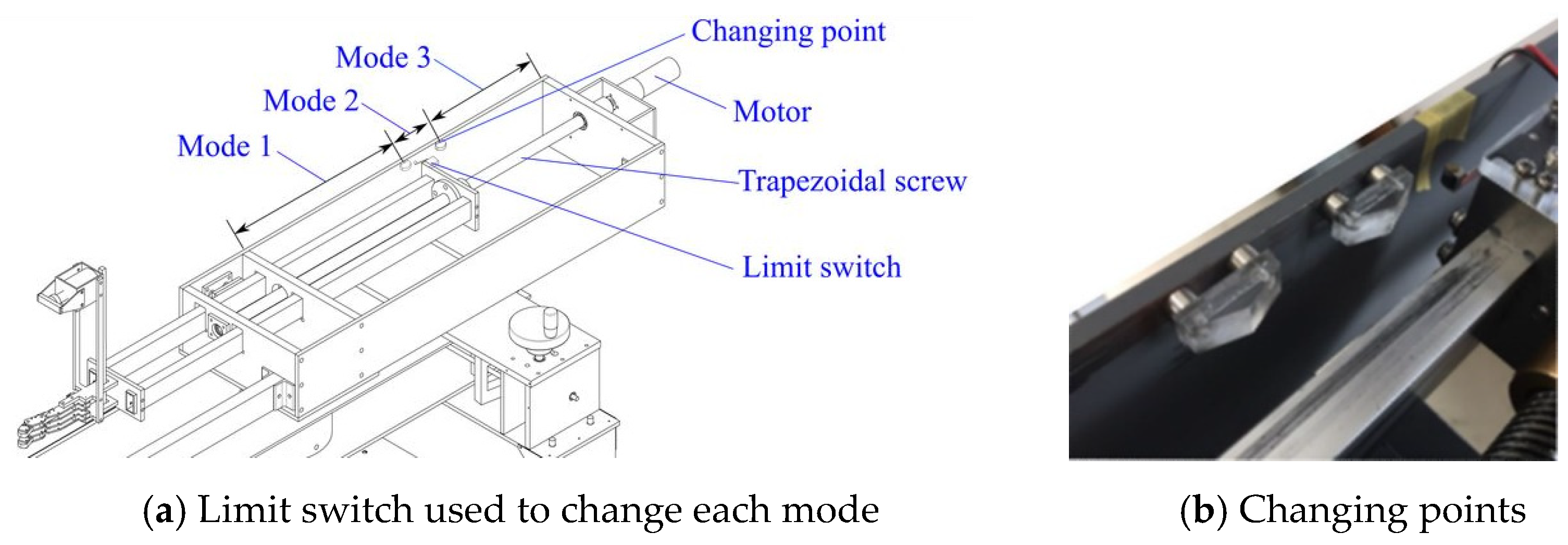
2.2. Driving Part for Drawing a Bowstring
2.3. Left Arm Part for Grasping a Bow
2.4. Release Mechanism
3. Results for the Experiment Using Machine 2
3.1. How to Experiment
3.2. Results of the Experiment
3.2.1. Evaluation of the Shooting Accuracy of the Device
3.2.2. Selection of an Abnormal Arrow
4. Conclusions
Acknowledgments
References
- Wakatabe, J.; Kanamori, C.; Ando, R.; Matsumoto, T.; Miyazaki, T. Development of Archery Robot: Long-range shooting test using roll angle adjustable bow grasping unit and quasi-static finger release unit. In Proceedings of the 2016 JSME Conference on Robotics and Mechatronics, Yokohama, Japan, 8–11 June 2016. [Google Scholar]
- Miyazaki, T.; Mukaiyama, K.; Komori, Y.; Okawa, K.; Taguchi, S.; Sugiura, H. Aerodynamic properties of an archery arrow. Sports Eng. 2013, 16, 43–54. [Google Scholar] [CrossRef]
- Kormushev, P.; Calinon, S.; Saegusa, R.; Metta, G. Learning the skill of archery by a humanoid robot iCub. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010. [Google Scholar]
- Spot-Hogg Hooter Shooter Bow Tuning Machine. Available online: https://www.abbeyarchery.com.au/p/SHHS/Spot-Hogg+Hooter+Shooter+Bow+Tuning+Machine.html (accessed on 20 February 2020).
- Coop’s Bowsmith Pro. Available online: https://www.lancasterarchery.com/coop-s-bowsmith-pro.html (accessed on 20 February 2020).
- Kooi, B.W.; Sparenberg, J.A. On the mechanics of the arrow: Archer’s Paradox. J. Eng. Math. 1997, 31, 285–303. [Google Scholar] [CrossRef]
- Nakamura, T.; Takada, Y.; Watanabe, H. Statics investigation about archery robot in drawing a bow. In Proceedings of the 2019 JSME Conference on Robotics and Mechatronics, Hiroshima, Japan, 5–8 June 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | Width | Hight | Mass | |
|---|---|---|---|---|
| Machine 1 | 1785 mm | 399 mm | 1575 mm | 24.1 kg |
| Machine 2 | 1872 mm | 903 mm | 1607 mm | 114.4 kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ohara, M.; Kawasaki, N.; Nakahama, J.; Takada, Y.; Watanabe, H. Development of an Archery Robot for the Selection of Arrows. Proceedings 2020, 49, 115. https://doi.org/10.3390/proceedings2020049115
Ohara M, Kawasaki N, Nakahama J, Takada Y, Watanabe H. Development of an Archery Robot for the Selection of Arrows. Proceedings. 2020; 49(1):115. https://doi.org/10.3390/proceedings2020049115
Chicago/Turabian StyleOhara, Masashi, Naoki Kawasaki, Jun Nakahama, Yogo Takada, and Hitoshi Watanabe. 2020. "Development of an Archery Robot for the Selection of Arrows" Proceedings 49, no. 1: 115. https://doi.org/10.3390/proceedings2020049115
APA StyleOhara, M., Kawasaki, N., Nakahama, J., Takada, Y., & Watanabe, H. (2020). Development of an Archery Robot for the Selection of Arrows. Proceedings, 49(1), 115. https://doi.org/10.3390/proceedings2020049115