Assembly and Characterization of a DE Actuator Based on Polymeric Domes as Biasing Element †

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
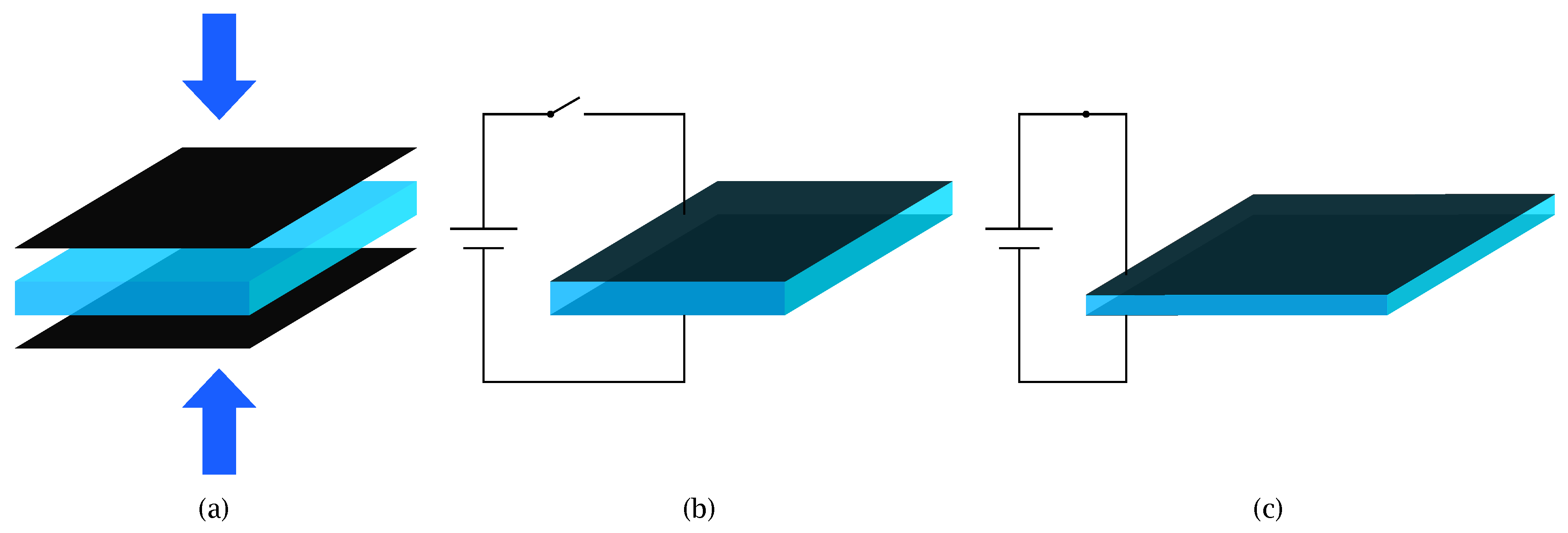
2.1. DE- and DEA-Principle
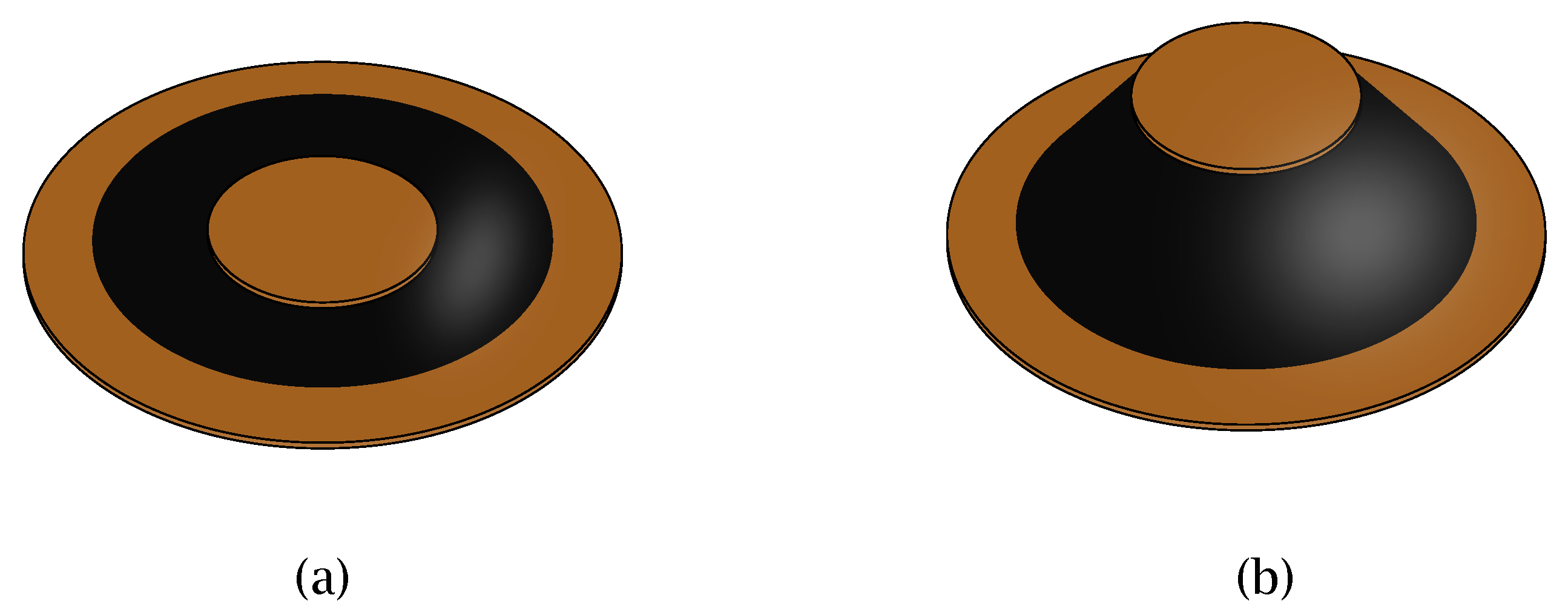
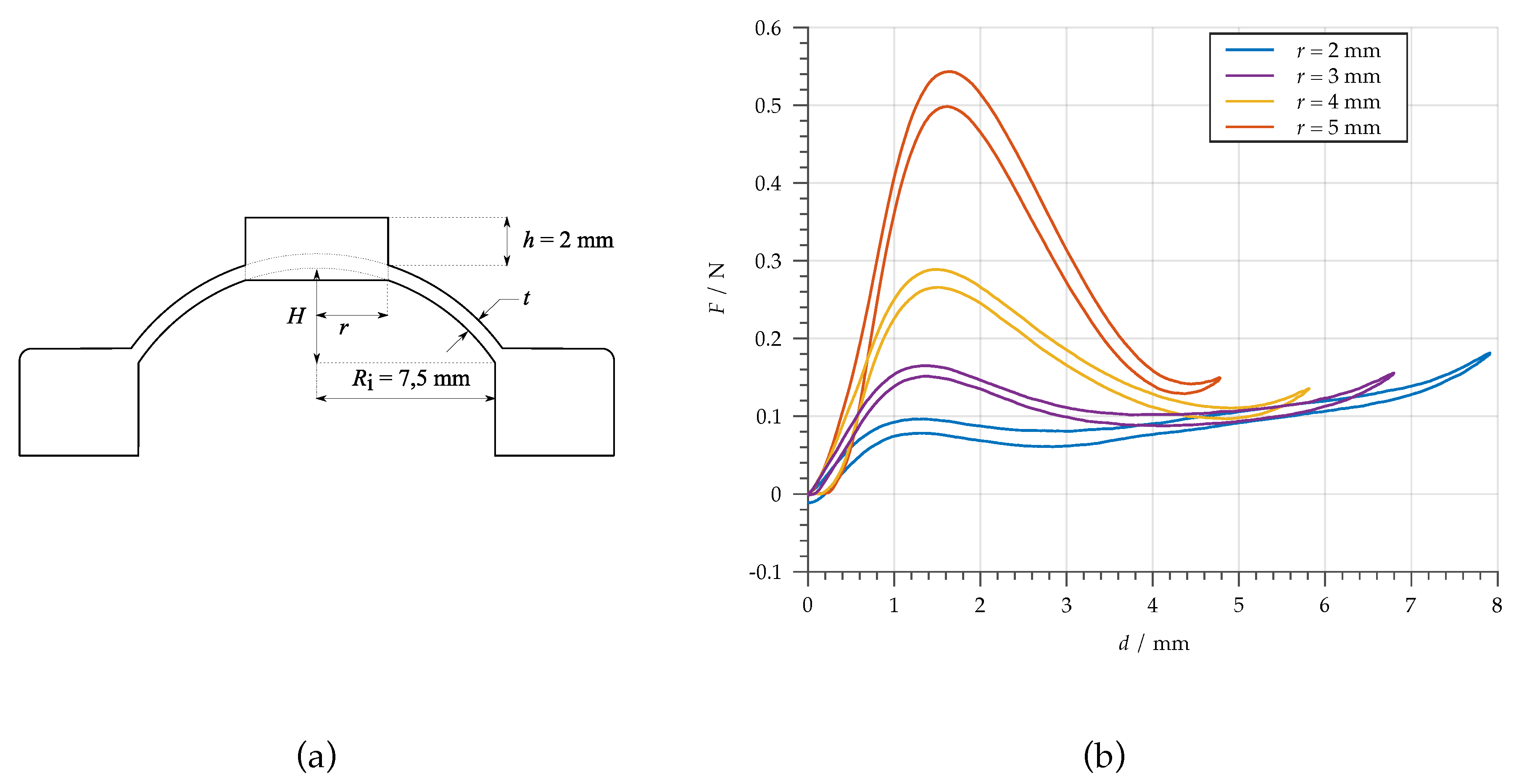
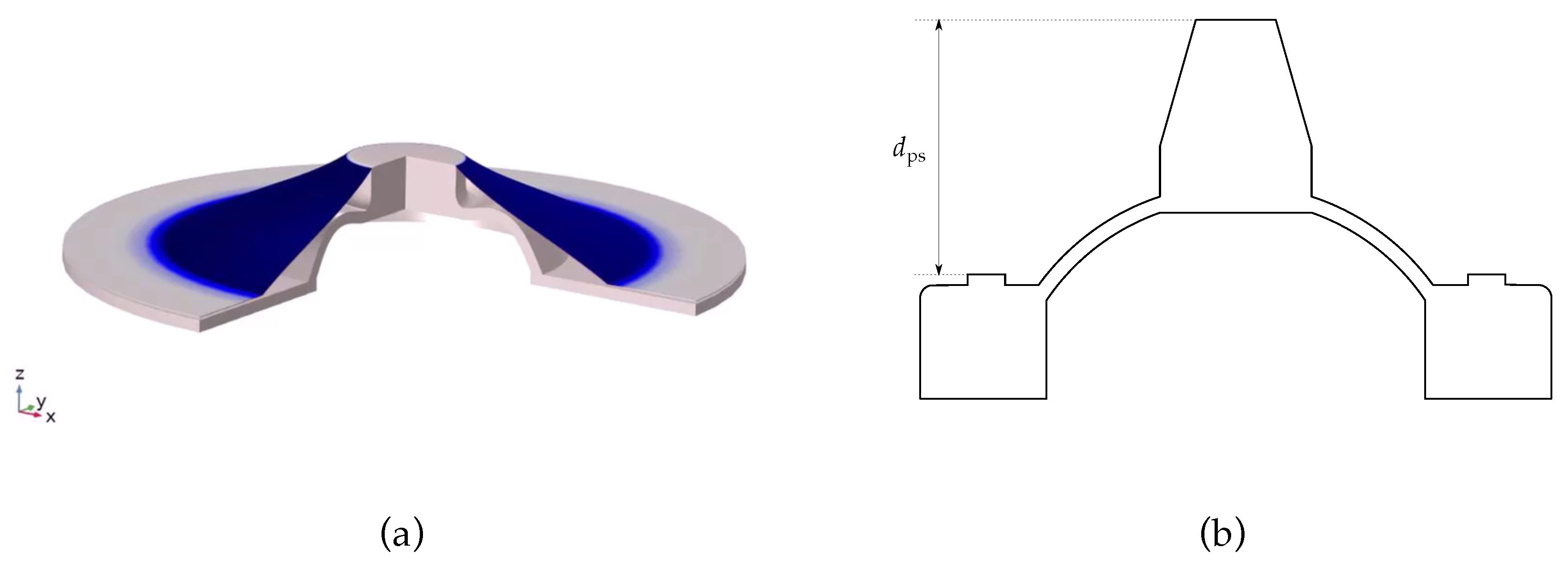
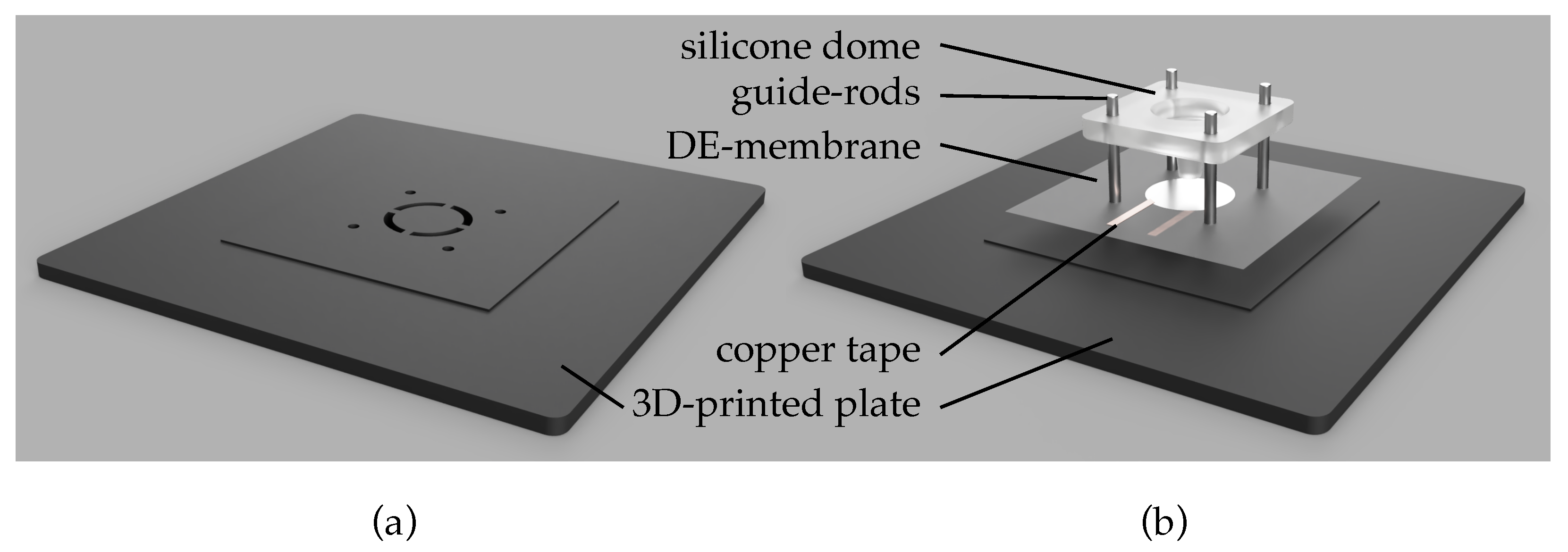
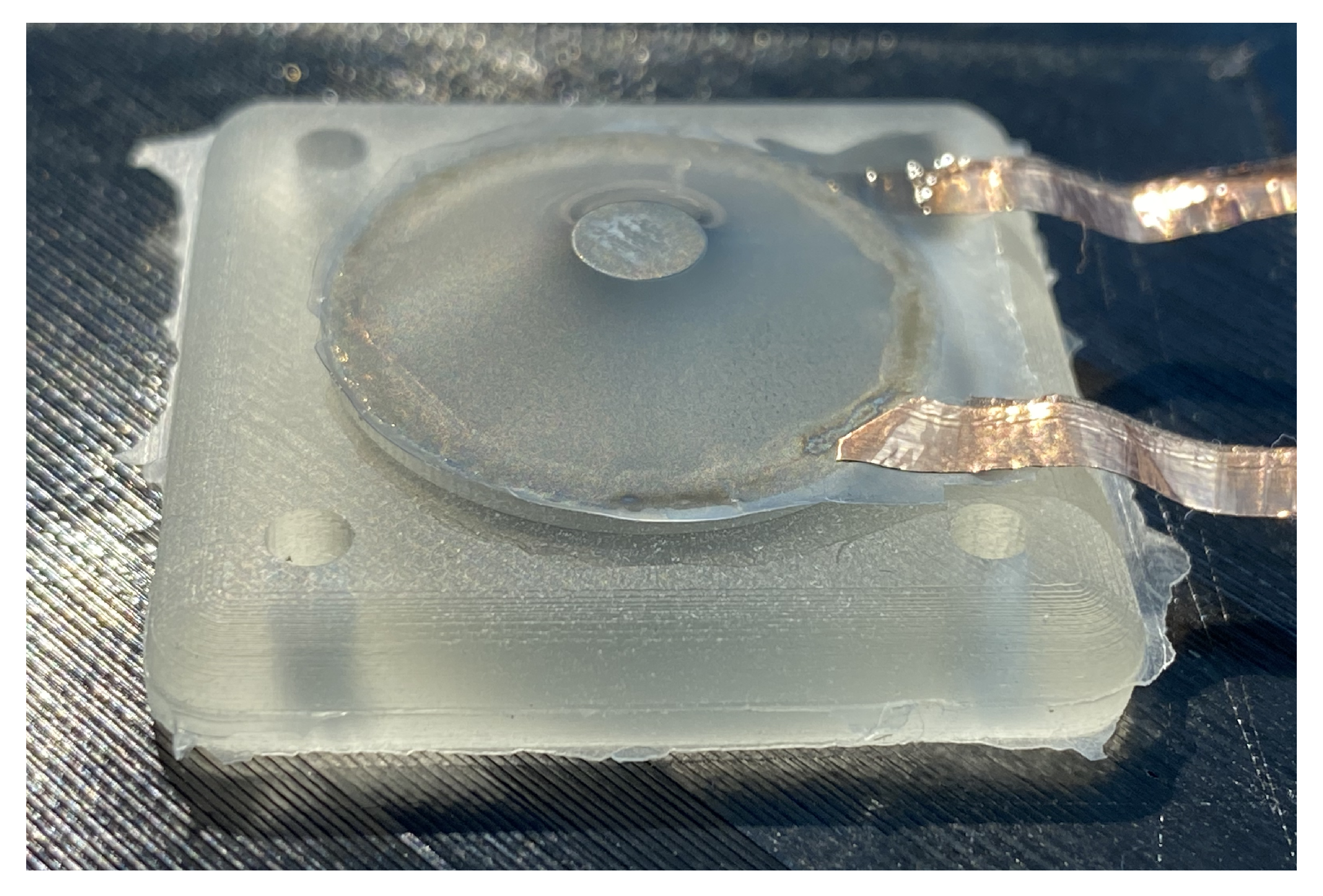
2.2. Design and Assembly of a Flexible Dome-Based DEA
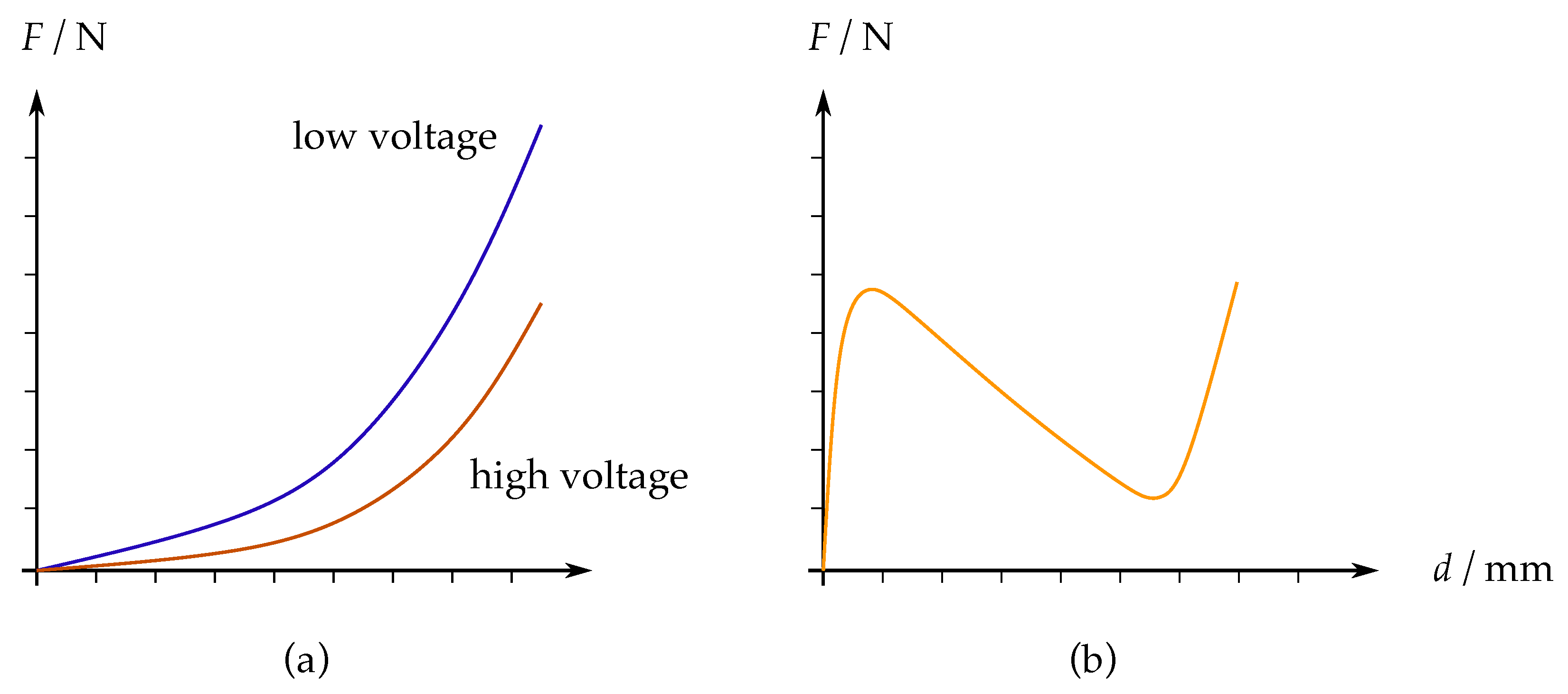
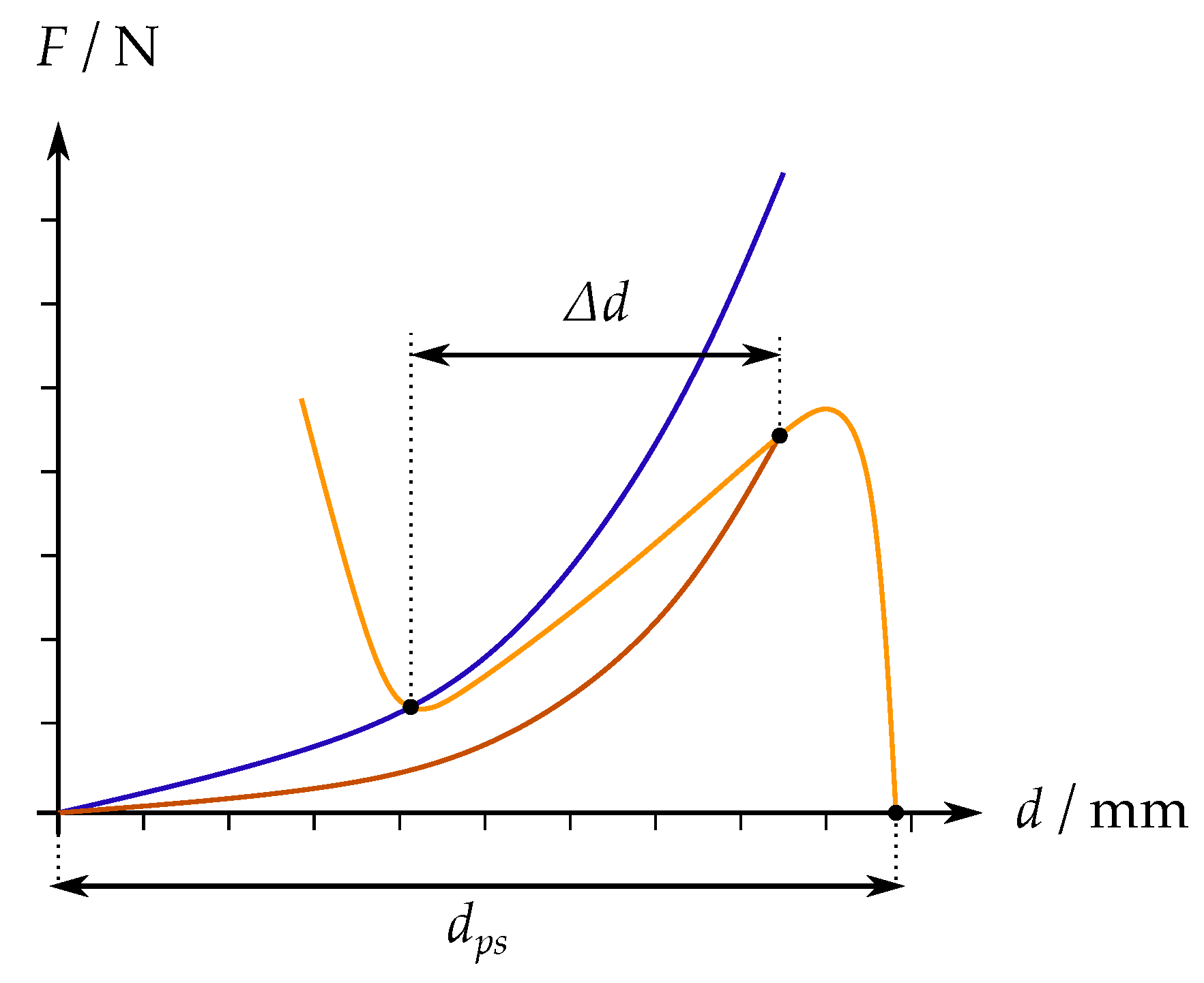
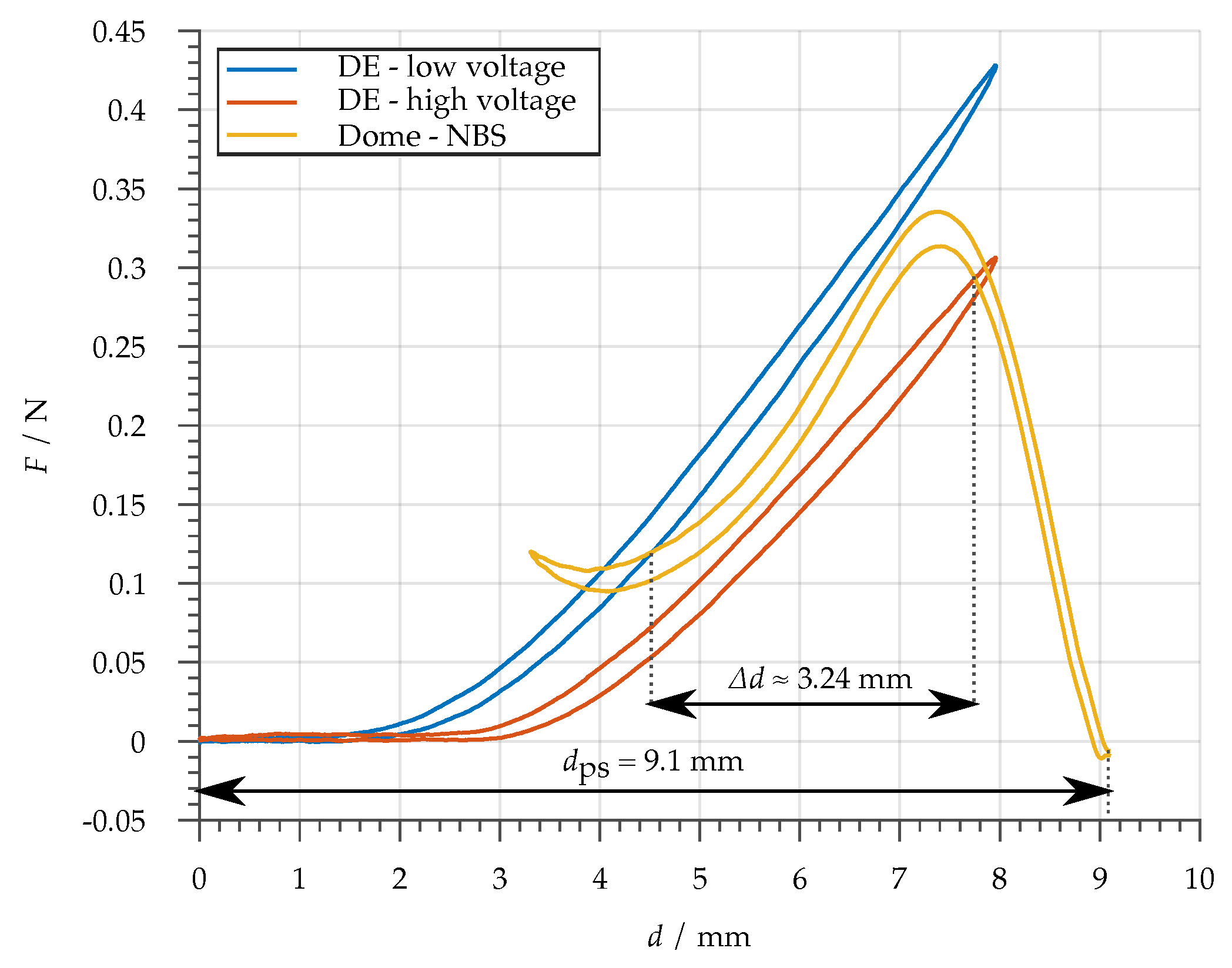
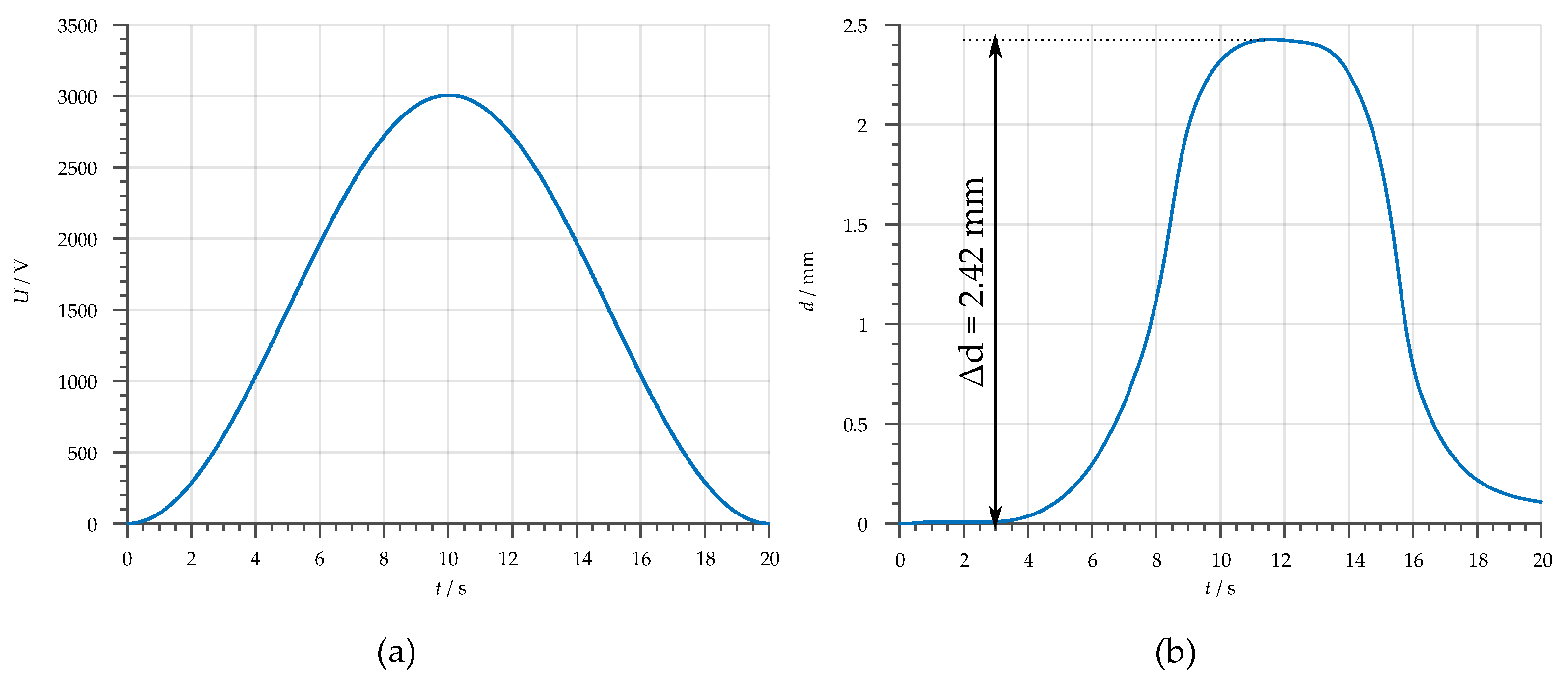
3. Results and Discussion
4. Conclusions
Funding
Abbreviations
| MEMS | Micro electromechanical system |
| DE | Dielectric elastomer |
| DEA | Dielectric elastomer actuator |
| COP-DEA | Circular out-of-plane dielectric elastomer actuator |
| NBS | Negative bias spring |
References
- Banerjee, H.; Tse, Z.T.H.; Ren, H. Soft robotics with compliance and adaptation for biomedical applications and forthcoming challenges. Int. J. Robot. Autom. 2018. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robot Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef]
- Ni, N.; Zhang, L. Dielectric Elastomer Sensors. In Elastomers; IntechOpen: London, UK, 2017. [Google Scholar] [CrossRef]
- Henke, E.F.M.; Wilson, K.E.; Anderson, I.A. Entirely soft dielectric elastomer robots. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), Portland, OR, USA, 26–29 March 2017; Volume 10163, p. 101631N. [Google Scholar] [CrossRef]
- Xu, D.; Gisby, T.A.; Xie, S.; Anderson, I.A. Scalable sensing electronics towards a motion capture suit. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 11–15 March 2013; Volume 8687, p. 86872L. [Google Scholar] [CrossRef]
- Glauser, O.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. Deformation capture via soft and stretchable sensor arrays. ACM Trans. Graph. 2019, 38. [Google Scholar] [CrossRef]
- Hill, M.; Rizzello, G.; Seelecke, S. Development and experimental characterization of a pneumatic valve actuated by a dielectric elastomer membrane. Smart Mater. Struct. 2017, 26. [Google Scholar] [CrossRef]
- Anderson, I.A.; Gisby, T.A.; McKay, T.G.; O’Brien, B.M.; Calius, E.P. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012, 112. [Google Scholar] [CrossRef]
- Kornbluh, R.D. Shape control of large lightweight mirrors with dielectric elastomer actuation. Proc. SPIE 2003, 5051, 143–158. [Google Scholar] [CrossRef]
- Godaba, H.; Foo, C.C.; Zhang, Z.Q.; Khoo, B.C.; Zhu, J. Giant voltage-induced deformation of a dielectric elastomer under a constant pressur. Appl. Phys. Lett. 2014, 105, 112901. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, C.; Pfattner, R.; Yan, H.; Jin, L.; Chen, S.; Molina-Lopez, F.; Lissel, F.; Liu, J.; Rabiah, N.; et al. A highly stretchable, transparent, and conductive polymer. Sci. Adv. 2017, 3, e1602076. [Google Scholar] [CrossRef] [PubMed]
- Hau, S.; Bruch, D.; Rizzello, G.; Motzki, P.; Seelecke, S. Silicone based dielectric elastomer strip actuators coupled with nonlinear biasing elements for large actuation strains. Smart Mater. Struct. 2018, 27. [Google Scholar] [CrossRef]
- Linnebach, P.; Simone, F.; Rizzello, G.; Seelecke, S. Development, manufacturing, and validation of a dielectric elastomer membrane actuator–driven contactor. J. Intell. Mater. Syst. Struct. 2019, 30, 636–648. [Google Scholar] [CrossRef]
- Mohd Ghazali, F.A.; Mah, C.K.; AbuZaiter, A.; Chee, P.S.; Mohamed Ali, M.S. Soft dielectric elastomer actuator micropump. Sens. Actuators A Phys. 2017, 263, 276–284. [Google Scholar] [CrossRef]
- Madhukar, A.; Perlitz, D.; Grigola, M.; Gai, D.; Jimmy Hsia, K. Bistable characteristics of thick-walled axisymmetric domes. Int. J. Solids Struct. 2014, 51, 2590–2597. [Google Scholar] [CrossRef]
- Hau, S.; Rizzello, G.; Seelecke, S. A novel dielectric elastomer membrane actuator concept for high-force applications. Extrem. Mech. Lett. 2018, 23, 24–28. [Google Scholar] [CrossRef]
- Zhang, R.; Lochmatter, P.; Kunz, A.; Kovacs, G. Spring roll dielectric elastomer actuators for a portable force feedback glove. In Proceedings of the Smart Structures and Materials 2006: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 26 February–2 March 2006. [Google Scholar] [CrossRef]
- Fasolt, B.; Hodgins, M.; Rizzello, G.; Seelecke, S. Effect of screen printing parameters on sensor and actuator performance of dielectric elastomer (DE) membranes. Sens. Actuators A Phys. 2017, 265, 10–19. [Google Scholar] [CrossRef]
- Hubertus, J.; Fasolt, B.; Linnebach, P.; Seelecke, S.; Schultes, G. Electromechanical evaluation of sub-micron NiCr-carbon thin films as highly conductive and compliant electrodes for dielectric elastomers. Sens. Actuators A Phys. 2020. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neu, J.; Croce, S.; Hubertus, J.; Schultes, G.; Rizzello, G.; Seelecke, S. Assembly and Characterization of a DE Actuator Based on Polymeric Domes as Biasing Element. Proceedings 2020, 64, 24. https://doi.org/10.3390/IeCAT2020-08490
Neu J, Croce S, Hubertus J, Schultes G, Rizzello G, Seelecke S. Assembly and Characterization of a DE Actuator Based on Polymeric Domes as Biasing Element. Proceedings. 2020; 64(1):24. https://doi.org/10.3390/IeCAT2020-08490
Chicago/Turabian StyleNeu, Julian, Sipontina Croce, Jonas Hubertus, Guenter Schultes, Gianluca Rizzello, and Stefan Seelecke. 2020. "Assembly and Characterization of a DE Actuator Based on Polymeric Domes as Biasing Element" Proceedings 64, no. 1: 24. https://doi.org/10.3390/IeCAT2020-08490
APA StyleNeu, J., Croce, S., Hubertus, J., Schultes, G., Rizzello, G., & Seelecke, S. (2020). Assembly and Characterization of a DE Actuator Based on Polymeric Domes as Biasing Element. Proceedings, 64(1), 24. https://doi.org/10.3390/IeCAT2020-08490