A Method for Smoothly Disengaging the Load-Holding Valves of Energy-Efficient Electro-Hydraulic Systems †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Problem Statement
- (1)
- In open-loop (the system operator defines uEM directly, for instance using a joystick).
- (2)
- In closed-loop (an algorithm calculates uEM to track the commanded piston position based on the measured position error).
2.2. Improved Motion Control Strategy
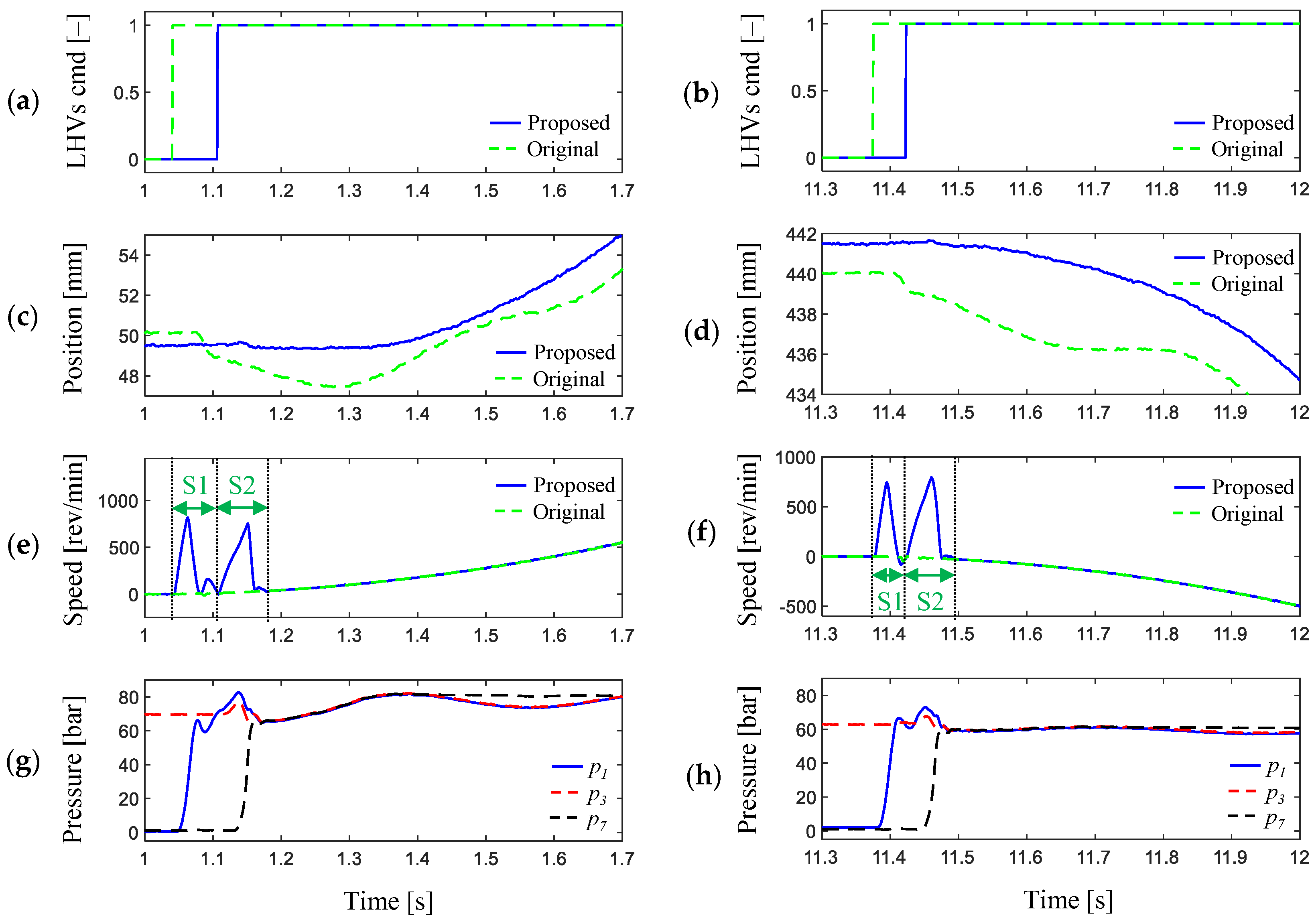
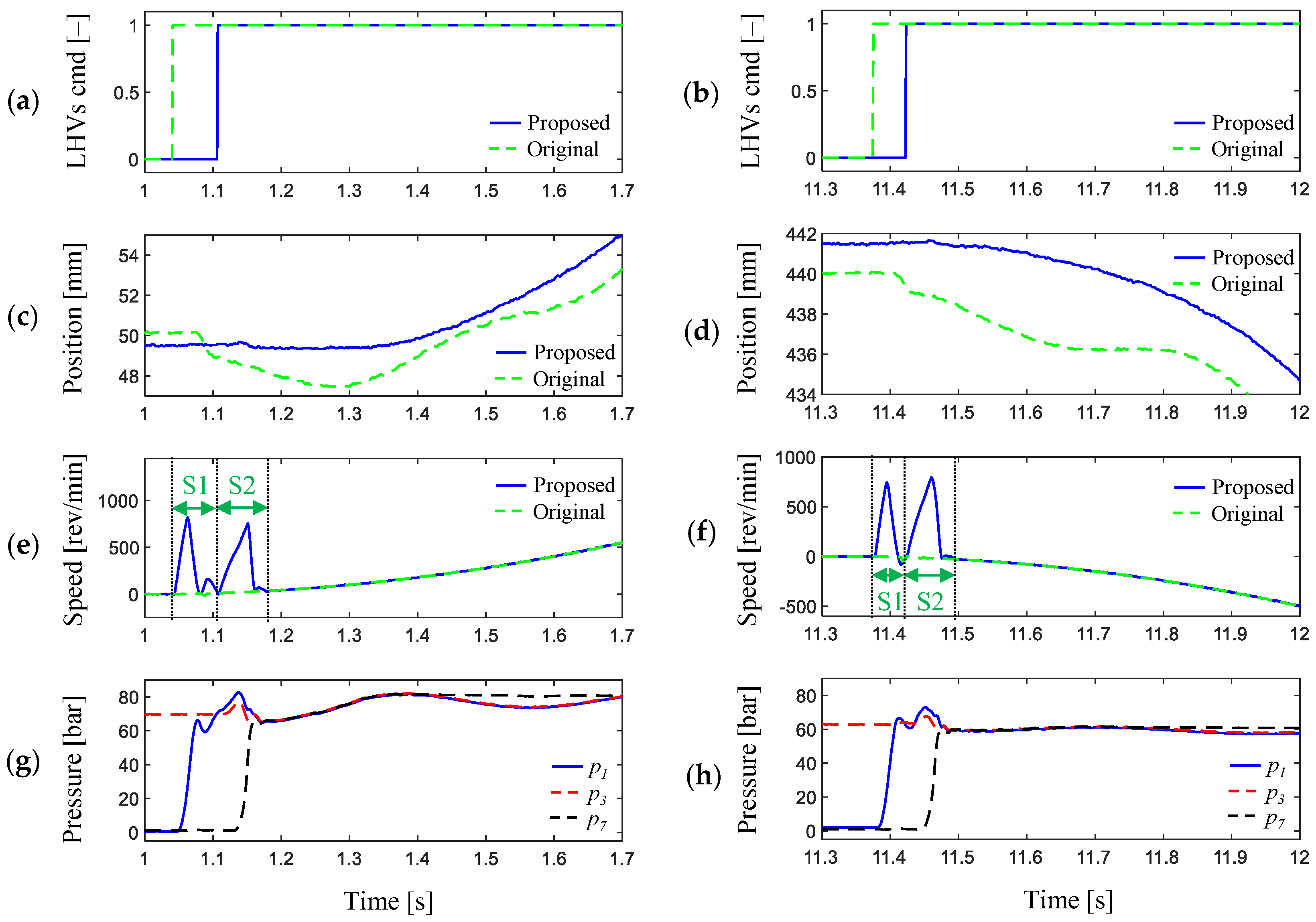
- Step 1. Right before opening the LHVs, the electric motor is controlled to build up the pump pressure on the piston-side (p1) to be equal to the actuator pressure (p3) (i.e., closed-loop pressure control is applied). Note that now the electrovalve (EV) is not energized, so the LHVs’ opening pilot (p7) remains very low and equal to the accumulator pressure (p5).
- Step 2. When the pressure difference between p3 and p1 (ePC,1) becomes smaller than a predefined threshold, the EV is energized, and the objective of the closed-loop pressure control is now compensating for the pressure difference between p3 and p7 (i.e., the EM is adjusting its speed based on the error ePC,2 = p3 − p7).
3. Results and Discussion
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| EM | electric motor |
| EV | electrovalve |
| LHV | load holding valve |
| P | hydraulic unit |
| PC | pressure control |
| VFF | velocity feedforward |
| p | pressure |
| nEM | angular speed of the electric motor |
| x | piston position |
| v | piston velocity |
| u | command |
| k | constant gain |
References
- Padovani, D.; Rundo, M.; Altare, G. The Working Hydraulics of Valve-Controlled Mobile Machines: Classification and Review. ASME J. Dyn. Syst. Meas. Control 2020, 142, 070801. [Google Scholar] [CrossRef]
- Rahmfeld, R.; Ivantysynova, M. Energy Saving Hydraulic Actuators for Mobile Machines. In Proceedings of the 1st Bratislavian Fluid Power Symposium, Casta-Pila, Slovakia, 2–3 June 1998; pp. 177–186. [Google Scholar]
- Michel, S.; Weber, J. Energy-efficient Electrohydraulic Compact Drives for Low Power Applications. In Proceedings of the ASME/BATH Symposium on Fluid Power Motion Control, Bath, UK, 12–14 September 2012. [Google Scholar]
- Pedersen, H.; Schmidt, L.; Andersen, T.O.; Brask, M.H. Investigation of New Servo Drive Concept Utilizing Two Fixed Displacement Units. Int. Symp. Fluid Power 2014, 8, 1–9. [Google Scholar] [CrossRef]
- Schmidt, L.; Roemer, D.; Pedersen, H.; Andersen, T. Speed-Variable Switched Differential Pump System for Direct Operation of Hydraulic Cylinders. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 12–14 October 2015. [Google Scholar]
- Schmidt, L.; Groenkjaer, M.; Pedersen, H.; Andersen, T. Position Control of an Over-Actuated Direct Hydraulic Cylinder Drive. Control Eng. Pract. 2017, 64, 1–14. [Google Scholar] [CrossRef]
- Minav, T.; Heikkinen, J.; Pietola, M. Direct Driven Hydraulic Drive for New Powertrain Topologies for Non-Road Mobile Machinery. Electr. Power Syst. Res. 2017, 152, 390–400. [Google Scholar] [CrossRef]
- Gøytil, P.; Padovani, D.; Hansen, M. On the Energy Efficiency of Dual Prime Mover Pump-Controlled Hydraulic Cylinders. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Longboat Key, FL, USA, 7–9 October 2019. [Google Scholar]
- Michel, S.; Weber, J. Electrohydraulic Compact-Drives for Low Power Applications Considering Energy-efficiency and High Inertial Loads. In Proceedings of the 7th FPNI PhD Symposium on Fluid Power, Reggio Emilia, Italy, 27–30 June 2012; pp. 1–18, 27–30. [Google Scholar]
- Altare, G.; Vacca, A.; Richter, C. A Novel Pump Design for an Efficient and Compact Electro-Hydraulic Actuator. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar]
- Altare, G.; Vacca, A. A Design Solution for Efficient and Compact Electro-hydraulic Actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef]
- Çalışkan, H.; Balkan, T.; Platin, B. A Complete Analysis for Pump Controlled Single Rod Actuators. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Hagen, D.; Padovani, D.; Ebbesen, M.K. Study of a Self-Contained Electro-Hydraulic Cylinder Drive. In Proceedings of the Global Fluid Power Society PhD Symposium (GFPS), Samara, Russia, 18–20 July 2018. [Google Scholar]
- Padovani, D.; Ketelsen, S.; Hagen, D.; Schmidt, L. A Self-Contained Electro-Hydraulic Cylinder with Passive Load-Holding Capability. Energies 2019, 12, 292. [Google Scholar] [CrossRef]
- Qu, S.; Fassbender, D.; Vacca, A.; Enrique, B.; Neumann, U. A Closed Circuit Electro-Hydraulic Actuator with Energy Recuperation Capability. In Proceedings of the 12th International Fluid Power Conference, Dresden, Germany, 12–14 October 2020. [Google Scholar]
- Minav, T.; Panu, S.; Matti, P. Direct-Driven Hydraulic Drive Without Conventional Oil Tank. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2014. [Google Scholar]
- Schmidt, L.; Ketelsen, S.; Brask, M.; Mortensen, K. A Class of Energy Efficient Self-Contained Electro-Hydraulic Drives with Self-Locking Capability. Energies 2019, 12, 1866. [Google Scholar] [CrossRef]
- Schmidt, L.; Ketelsen, S.; Padovani, D.; Mortensen, K. Improving the Efficiency and Dynamic Properties of a Flow Control Unit in a Self-Locking Compact Electro-Hydraulic Cylinder Drive. In Proceedings of the ASME/BATH Symposium on Fluid Power Motion Control, Longboat Key, FL, USA, 7–9 October 2019. [Google Scholar]
- Ketelsen, S.; Padovani, D.; Andersen, T.O.; Ebbesen, M.K.; Schmidt, L. Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies 2019, 12, 1293. [Google Scholar] [CrossRef]
- Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 2: Energy Efficiency. Actuators 2019, 8, 78. [Google Scholar] [CrossRef]
- Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control. Actuators 2019, 8, 79. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hagen, D.; Padovani, D. A Method for Smoothly Disengaging the Load-Holding Valves of Energy-Efficient Electro-Hydraulic Systems. Proceedings 2020, 64, 36. https://doi.org/10.3390/IeCAT2020-08478
Hagen D, Padovani D. A Method for Smoothly Disengaging the Load-Holding Valves of Energy-Efficient Electro-Hydraulic Systems. Proceedings. 2020; 64(1):36. https://doi.org/10.3390/IeCAT2020-08478
Chicago/Turabian StyleHagen, Daniel, and Damiano Padovani. 2020. "A Method for Smoothly Disengaging the Load-Holding Valves of Energy-Efficient Electro-Hydraulic Systems" Proceedings 64, no. 1: 36. https://doi.org/10.3390/IeCAT2020-08478
APA StyleHagen, D., & Padovani, D. (2020). A Method for Smoothly Disengaging the Load-Holding Valves of Energy-Efficient Electro-Hydraulic Systems. Proceedings, 64(1), 36. https://doi.org/10.3390/IeCAT2020-08478