
UAS Hyperspatial LiDAR Data Performance in Delineation and Classification across a Gradient of Wetland Types

 ,
, 
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
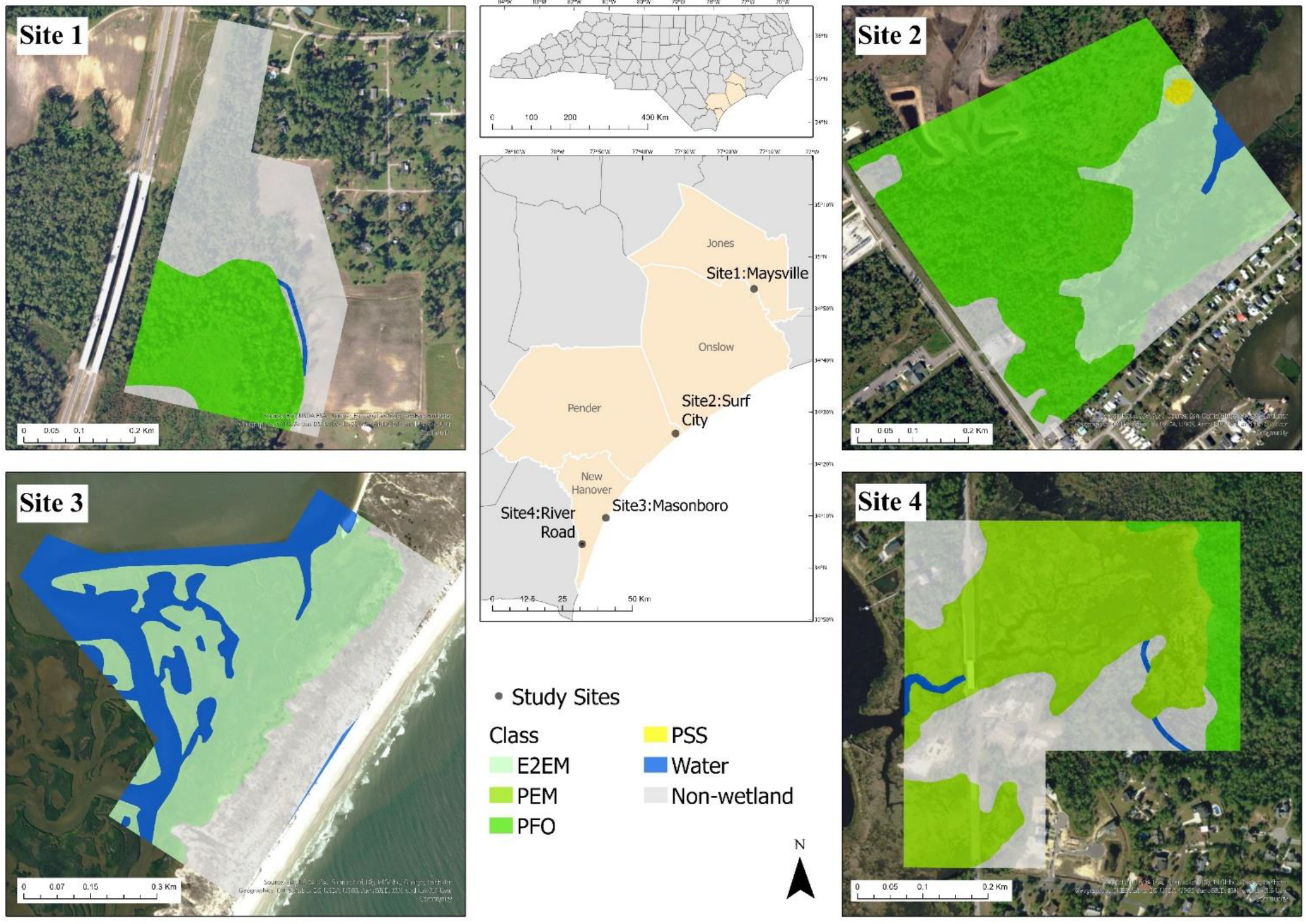
2.1. Study Sites
2.2. Data Acquisition
2.2.1. UAS LiDAR Data
2.2.2. UAS Multispectral Data
2.2.3. Field Sampling
2.2.4. Airborne LiDAR Data
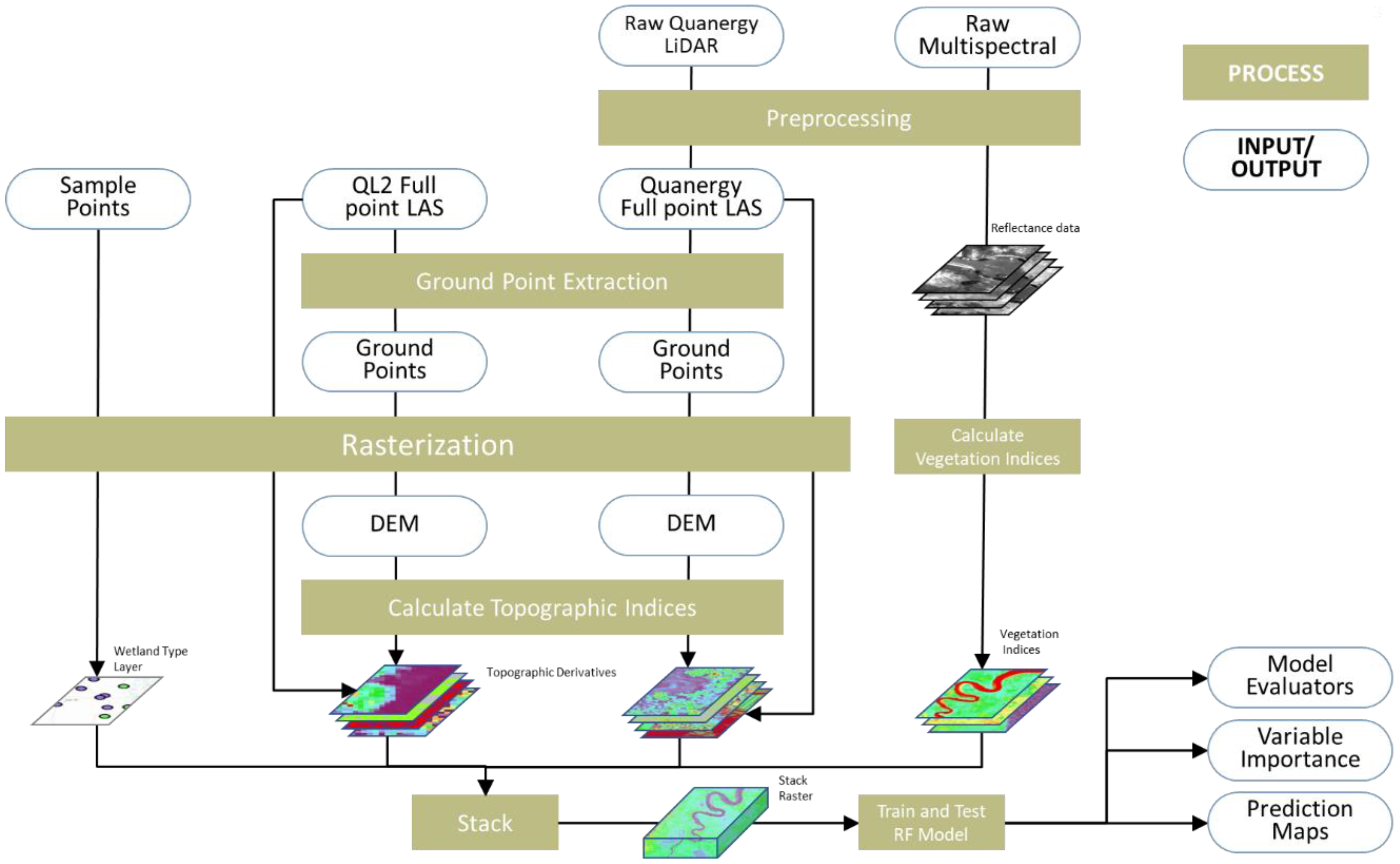
2.3. Data Processing
2.3.1. Preprocessing
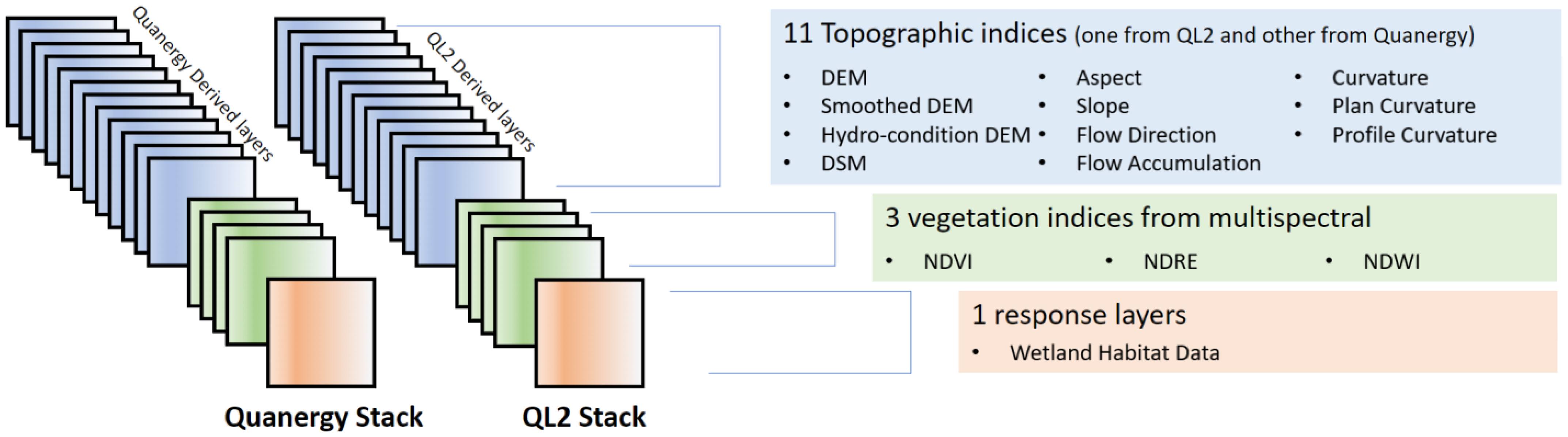
2.3.2. Topographic Indices
2.3.3. Vegetation Indices and Response Variables
2.4. Classification Analysis
2.4.1. Stack Raster
2.4.2. Random Forest Classification
2.5. Post-Processing
3. Results
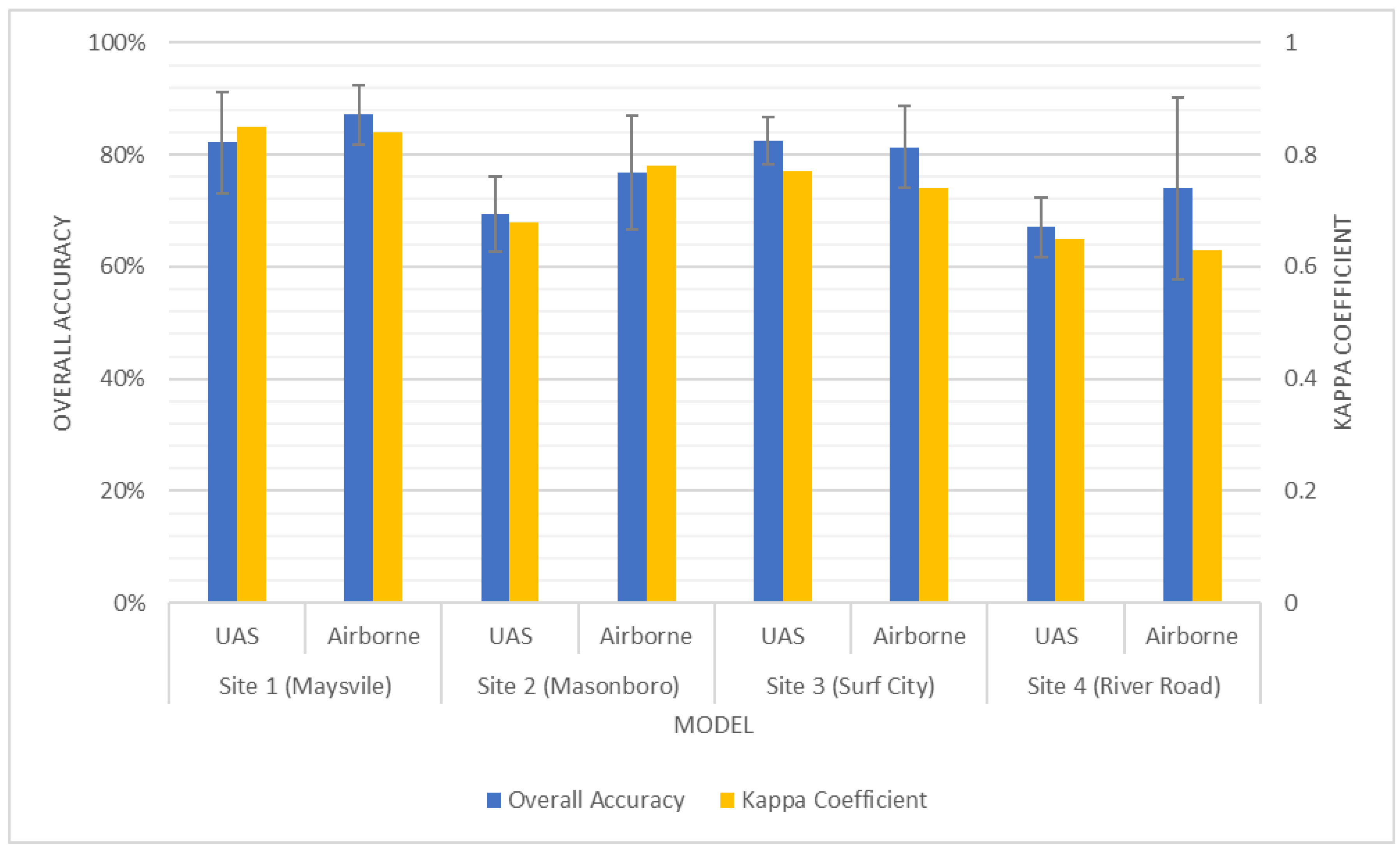
3.1. Wetland Classification Model
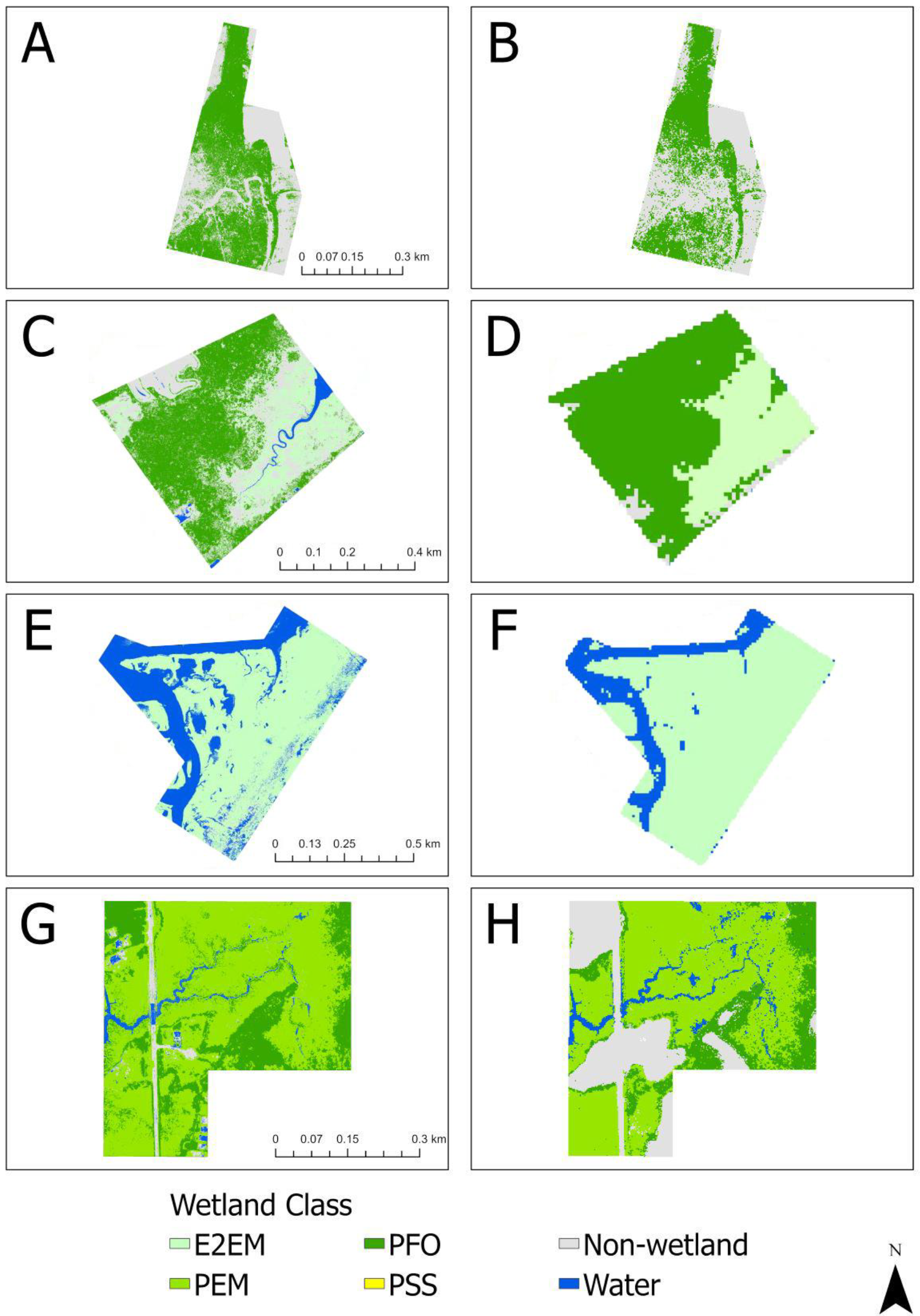
3.2. Classification Maps
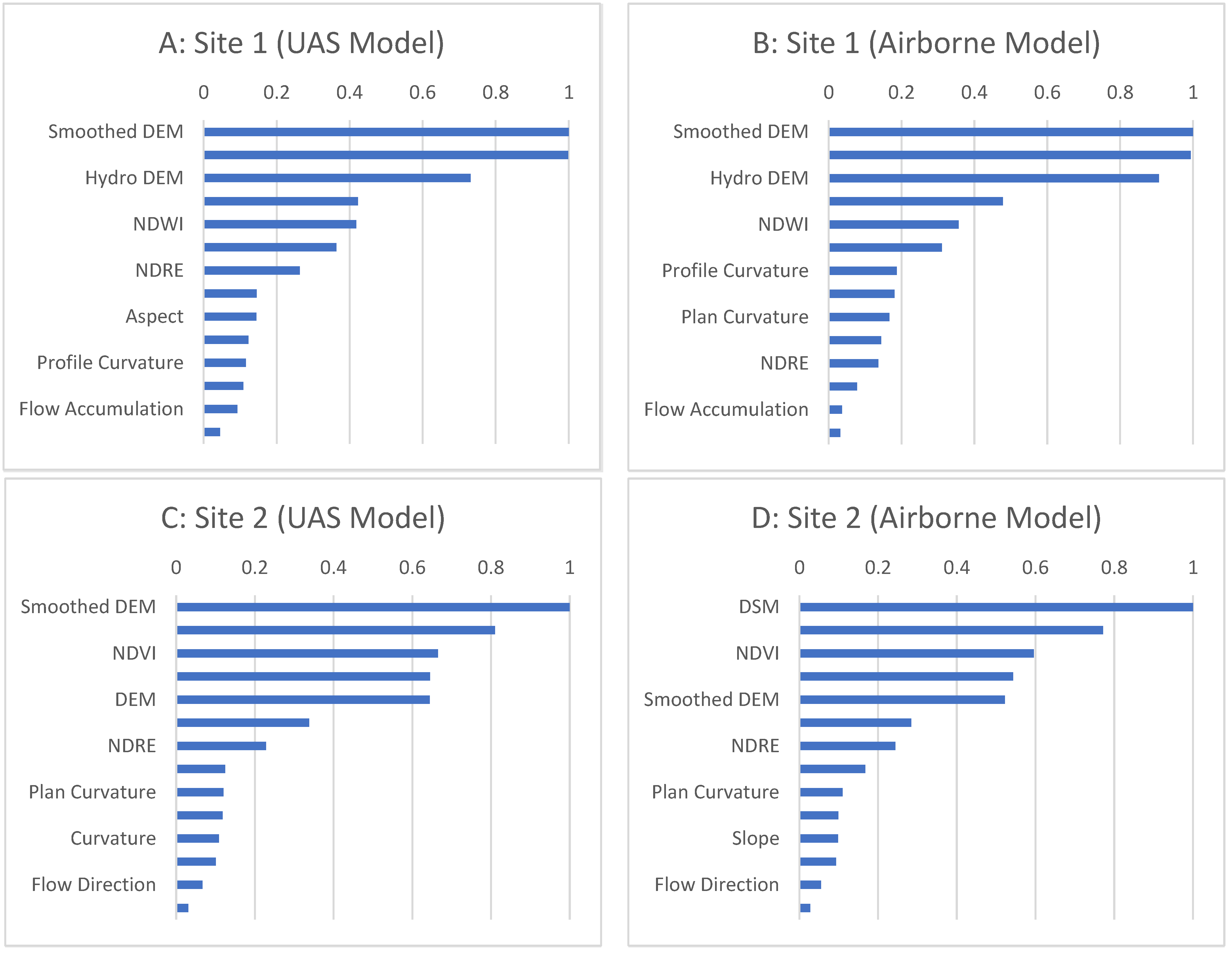
3.3. Variable Importance Classification
4. Discussion
4.1. Model Performance
4.2. Challenges, Limitations, and Future Directions
5. Conclusion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- EPA. America’s Wetlands: Our Vital Link Between Land and Water. In NSCEP; U.S. Environmental Protection Agency, Office of Water, Office of Wetlands, Oceans and Watersheds: Washington, DC, USA, 1995; pp. 1–16. [Google Scholar]
- Woodward, R.T.; Wui, Y.S. The economic value of wetland services: A meta-analysis. Ecol. Econ. 2001, 37, 257–270. [Google Scholar] [CrossRef]
- Richardson, C.J. Ecological functions and human values in wetlands: A framework for assessing forestry impacts. Wetlands 1994, 14, 1–9. [Google Scholar] [CrossRef]
- EPA. Coastal Wetlands Initiative: Mid-Atlantic Review. Available online: https://www.epa.gov/wetlands/epas-efforts-coastal-wetlands-initiative-0 (accessed on 22 April 2022).
- Hu, S.J.; Niu, Z.G.; Chen, Y.F.; Li, L.F.; Zhang, H.Y. Global wetlands: Potential distribution, wetland loss, and status. Sci. Total Environ. 2017, 586, 319–327. [Google Scholar] [CrossRef] [PubMed]
- Davidson, N.C. How much wetland has the world lost? Long-term and recent trends in global wetland area. Mar. Freshw. Res. 2014, 65, 934–941. [Google Scholar] [CrossRef]
- Dahl, T.E.; Johnson, C.E.; Frayer, W.E. Wetlands Status and Trends in the Conterminous United States Mid-1970′s to Mid-1980′s; United States Fish and Wildlife Service: Washington, DC, USA, 1991; Volume 28.
- Dah, T.E. Status and Trends of Wetlands in the Coastal Wetlands of the Continuous United States 2004 to 2009; U.S. Department of the Interior; Fish and Wildlife Service: Washington, DC, USA, 2013; p. 108.
- Rodriguez, C.F.; Becares, E.; Fernandez-Alaez, M.; Fernandez-Alaez, C. Loss of diversity and degradation of wetlands as a result of introducing exotic crayfish. Biol. Invasions 2005, 7, 75–85. [Google Scholar] [CrossRef]
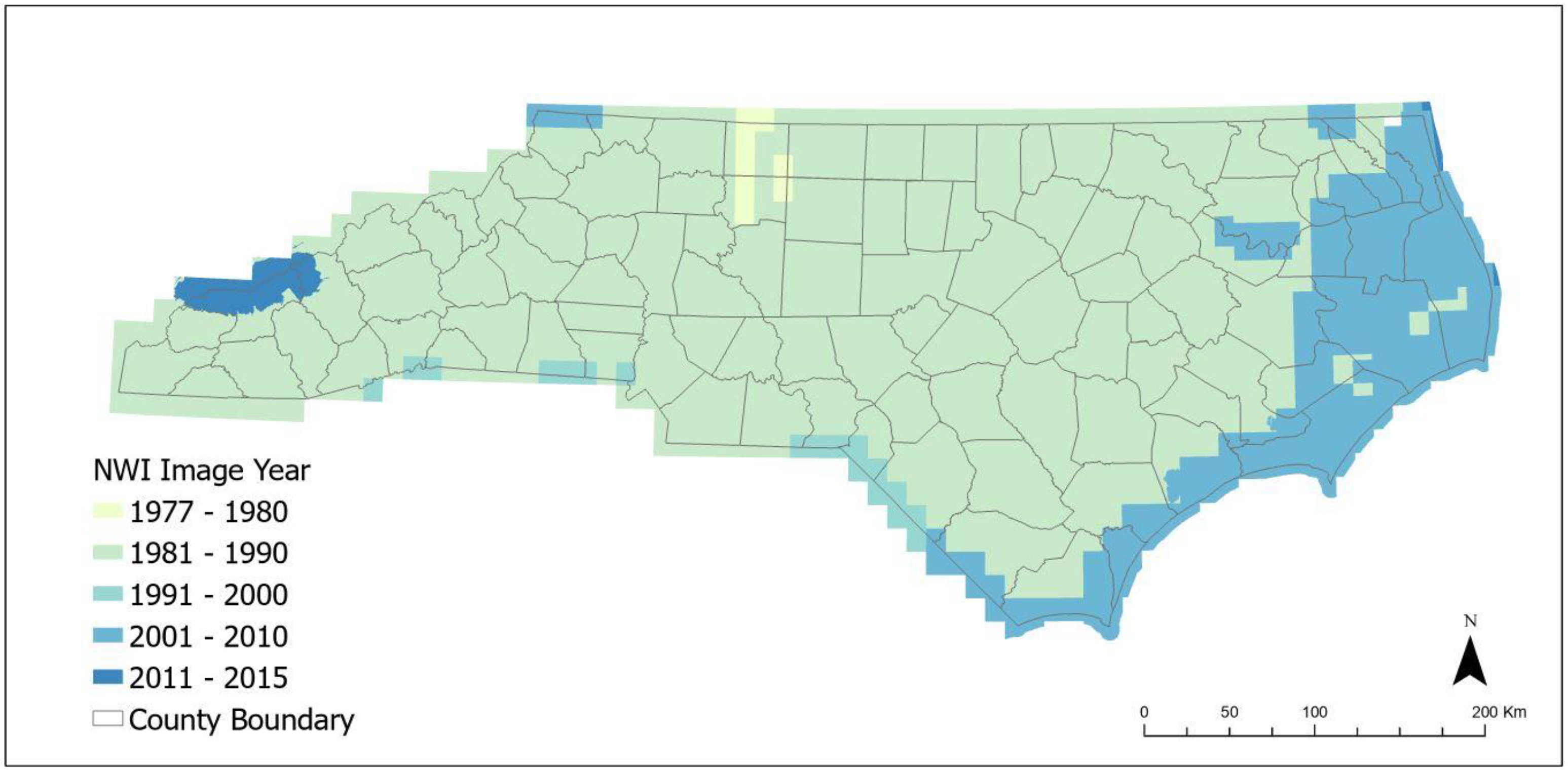
- Sutter, L. DCM Wetland Mapping in Coastal North Carolina. In The North Carolina Department of Environment and Natural Resources Pursuant to the United States Environmental Protection Agency Award No. 994548-94-5; North Carolina Division of Coastal Management: Morehead City, NC, USA, 1999. [Google Scholar]
- Gale, S. National Wetlands Inventory (NWI) Accuracy in North Carolina; USEPA Multipurpose Grant AA-01D03020; NC Department of Environmental Quality Division of Water Resources: Raleigh, NC, USA, 2021.
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef]
- Pricope, N.G.; Halls, J.N.; Mapes, K.L.; Baxley, J.B.; Wu, J.J. Quantitative Comparison of UAS-Borne LiDAR Systems for High-Resolution Forested Wetland Mapping. Sensors 2020, 20, 4453. [Google Scholar] [CrossRef]
- Abeysinghe, T.; Milas, A.S.; Arend, K.; Hohman, B.; Reil, P.; Gregory, A.; Vazquez-Ortega, A. Mapping Invasive Phragmites australis in the Old Woman Creek Estuary Using UAV Remote Sensing and Machine Learning Classifiers. Remote Sens. 2019, 11, 1380. [Google Scholar] [CrossRef]
- Guo, M.; Li, J.; Sheng, C.L.; Xu, J.W.; Wu, L. A Review of Wetland Remote Sensing. Sensors 2017, 17, 777. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Wetland mapping with LiDAR derivatives, SAR polarimetric decompositions, and LiDAR-SAR fusion using a random forest classifier. Can. J. Remote Sens. 2013, 39, 290–307. [Google Scholar] [CrossRef]
- Tian, S.H.; Zhang, X.F.; Tian, J.; Sun, Q. Random Forest Classification of Wetland Landcovers from Multi-Sensor Data in the Arid Region of Xinjiang, China. Remote Sens. 2016, 8, 954. [Google Scholar] [CrossRef]
- Kuleli, T.; Guneroglu, A.; Karsli, F.; Dihkan, M. Automatic detection of shoreline change on coastal Ramsar wetlands of Turkey. Ocean Eng. 2011, 38, 1141–1149. [Google Scholar] [CrossRef]
- Lubczonek, J.; Kazimierski, W.; Zaniewicz, G.; Lacka, M. Methodology for combining data acquired by unmanned surface and aerial vehicles to create digital bathymetric models in shallow and ultra-shallow waters. Remote Sens. 2021, 14, 105. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lewicka, O.; Makar, A.; Burdziakowski, P.; Dąbrowski, P. Study on the Coastline Evolution in Sopot (2008–2018) Based on Landsat Satellite Imagery. J. Mar. Sci. Eng. 2020, 8, 464. [Google Scholar] [CrossRef]
- Rapinel, S.; Hubert-Moy, L.; Clement, B. Combined use of LiDAR data and multispectral earth observation imagery for wetland habitat mapping. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 56–64. [Google Scholar] [CrossRef]
- Chust, G.; Galparsoro, I.; Borja, A.; Franco, J.; Uriarte, A. Coastal and estuarine habitat mapping, using LIDAR height and intensity and multi-spectral imagery. Estuar. Coast. Shelf Sci. 2008, 78, 633–643. [Google Scholar] [CrossRef]
- Wang, S.-G.; Deng, J.; Chen, M.; Weatherford, M.; Paugh, L. Random Forest Classification and Automation for Wetland Identification based on DEM Derivatives. In Proceedings of the 2015 ICOET (International Conference on Ecology and Transportation), Raleigh, NC, USA, 20–24 September 2015; pp. 402–408. [Google Scholar]
- O’Neil, G.L.; Saby, L.; Band, L.E.; Goodall, J.L. Effects of LiDAR DEM smoothing and conditioning techniques on a topography-based wetland identification model. Water Resour. Res. 2019, 55, 4343–4363. [Google Scholar] [CrossRef]
- Mohri, M.; Rostamizadeh, A.; Talwalkar, A. Foundations of Machine Learning; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Wen, L.; Hughes, M. Coastal wetland mapping using ensemble learning algorithms: A comparative study of bagging, boosting and stacking techniques. Remote Sens. 2020, 12, 1683. [Google Scholar] [CrossRef]
- Cowardin, L.M.; Carter, V.; Golet, F.C.; LaRoe, E.T. Classification of Wetlands and Deepwater Habitats of the United States; Fish and Wildlife Service, US Department of the Interior: Washington, DC, USA, 1979.
- Fear, J.A. Comprehensive Site Profile for the North Carolina National Estuarine Research Reserve; The North Carolina National Estuarine Research Reserve: Apex, NC, USA, 2008. [Google Scholar]
- Anders, N.; Valente, J.; Masselink, R.; Keesstra, S. Comparing filtering techniques for removing vegetation from UAV-based photogrammetric point clouds. Drones 2019, 3, 61. [Google Scholar] [CrossRef]
- Hashimoto, K.; Shimozono, T.; Matsuba, Y.; Okabe, T. Unmanned aerial vehicle depth inversion to monitor river-mouth bar dynamics. Remote Sens. 2021, 13, 412. [Google Scholar] [CrossRef]
- Cai, S.S.; Zhang, W.M.; Liang, X.L.; Wan, P.; Qi, J.B.; Yu, S.S.; Yan, G.J.; Shao, J. Filtering Airborne LiDAR Data Through Complementary Cloth Simulation and Progressive TIN Densification Filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef]
- Aiello, S.; Eckstrand, E.; Fu, A.; Landry, M.; Aboyoun, P. Machine Learning with R and H2O. 2018. Available online: http://h2o.ai/resources/ (accessed on 6 May 2022).
- R Core Team. R: A Language and Environment for Statistical Computing. The R Project for Statistical Computing. 2020. Available online: https://www.r-project.org/ (accessed on 6 May 2022).
- Berrar, D. Cross-Validation. Encycl. Bioinform. Comput. Biol. 2019, 1, 542–545. [Google Scholar] [CrossRef]
- Guan, S.; Sirianni, H.; Wang, G.; Zhu, Z. sUAS Monitoring of Coastal Environments: A Review of Best Practices from Field to Lab. Drones 2022, 6, 142. [Google Scholar] [CrossRef]
- Morgan, G.R.; Hodgson, M.E.; Wang, C.; Schill, S.R. Unmanned aerial remote sensing of coastal vegetation: A review. Drones 2022, 6, 142. [Google Scholar] [CrossRef]
- Dronova, I.; Kislik, C.; Dinh, Z.; Kelly, M. A review of unoccupied aerial vehicle use in wetland applications: Emerging opportunities in approach, technology, and data. Drones 2021, 5, 45. [Google Scholar] [CrossRef]
- Mahdavi, S.; Salehi, B.; Granger, J.; Amani, M.; Brisco, B.; Huang, W. Remote sensing for wetland classification: A comprehensive review. GIScience Remote Sens. 2018, 55, 623–658. [Google Scholar] [CrossRef]
- Lei, G.; Li, A.; Bian, J.; Yan, H.; Zhang, L.; Zhang, Z.; Nan, X. OIC-MCE: A practical land cover mapping approach for limited samples based on multiple classifier ensemble and iterative classification. Remote Sens. 2020, 12, 987. [Google Scholar] [CrossRef]
- Belluco, E.; Camuffo, M.; Ferrari, S.; Modenese, L.; Silvestri, S.; Marani, A.; Marani, M. Mapping salt-marsh vegetation by multispectral and hyperspectral remote sensing. Remote Sens. Environ. 2006, 105, 54–67. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, Y.; Song, Z.; Chen, B.; Zhang, Y.; Yuan, W.; Chen, C.; Chen, W.; Ran, X.; Wang, Y. Mapping coastal wetlands of the Bohai Rim at a spatial resolution of 10 M using multiple open-access satellite data and terrain indices. Remote Sens. 2020, 12, 4114. [Google Scholar] [CrossRef]
- Wilson, J.P.; Lam, C.S.; Deng, Y. Comparison of the performance of flow-routing algorithms used in GIS-based hydrologic analysis. Hydrol. Processes Int. J. 2007, 21, 1026–1044. [Google Scholar] [CrossRef]
- O’Neil, G.L.; Goodall, J.L.; Watson, L.T. Evaluating the potential for site-specific modification of LiDAR DEM derivatives to improve environmental planning-scale wetland identification using Random Forest classification. J. Hydrol. 2018, 559, 192–208. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wetland Types | Wetland Codes | Descriptions |
|---|---|---|
| Estuarine Intertidal Emergent | E2EM | The estuarine system consists of deep-water tidal habitats and adjacent tidal wetlands that are usually semi-enclosed by land but have open access to the open ocean. This system is characterized by the presence of intertidal and emergent vegetation. |
| Palustrine Forest | PFO | The palustrine system includes inland, nontidal wetlands characterized by the presence of forest. |
| Palustrine Emergent | PEM | The palustrine system includes inland, nontidal wetlands characterized by the presence of emergent vegetation. |
| Palustrine Scrub-Shrub | PSS | The palustrine system includes inland, nontidal wetlands characterized by the presence of scrub-shrub. |
| Class Code | Site 1 | Site 2 | Site 3 | Site 4 |
|---|---|---|---|---|
| E2EM | - | 28.00% | 46.86% | - |
| PFO | 40.02% | 62.04% | - | 9.00% |
| PEM | - | - | - | 55.65% |
| PSS | - | 0.58% | - | - |
| Water | 0.80% | 1.15% | 27.17% | 1.18% |
| Non-wetland | 59.17% | 8.23% | 25.97% | 34.17% |
| Total Acreage | 43.80 | 78.28 | 109.98 | 54.34 |
| Site Names | Fieldwork Dates |
|---|---|
| Site 1: Maysville | 22 January 2021 |
| Site 2: Surf City | 6 November 2020 |
| Site 3: Masonboro | 11 December 2020 |
| Site 4: River Road | 3 October 2020 |
| Parameters | Quanergy M8 Core | Leica ALS70HP | Pegasus HA500 |
|---|---|---|---|
| Platform | UAS | Aircraft | Aircraft |
| Wavelength | 905 nm | 1064 nm | 1064 nm |
| Frame Rate | 5–20 Hz | 120–200 Hz | 0–140 Hz |
| FOV (degree) | Horizontal: 360°, Vertical: 20° (+3°/−17°) | 0–75 | 0–75 |
| Range [m] | 1–150 | 200–3500 | 150–5000 |
| Range accuracy [cm] | <3 (1σ at 50 m) | 7–16 | <5–20 |
| Returns | 3 | unlimited | 4 |
| Weight [kg] | 0.9 | 59 | 65 |
| Parrot Sequoia+ | |
|---|---|
| Multispectral Bands | Green (550 nm ± 40 nm) Red (660 nm ± 40 nm) Red edge (735 nm ± 10 nm) Near-infrared (790 nm ± 40 nm) |
| Single-band resolution | 1.2 MP 1280 × 960 px (4:3) |
| Single-Band FOV | HFOV: 62° VFOV: 49° DFOV: 74° |
| Data Input | Definition |
|---|---|
| DSM | Max height elevation (including vegetation and artificial objects) in meters |
| DEM | Ground elevation (vegetation and artificial objects removed) in meters |
| Smoothed DEM | Smoothing is used to smooth DEMs to remove the elevation changes that are too small to indicate features of interest (i.e., microtopographic noise), which are ubiquitous in high-resolution DEMs. Smoothing method: Perona–Malik [24] |
| Hydro-condition DEM (Hydro DEM) | Hydro-conditioning resolves topographic depressions before modeling flow paths |
| Aspect | Compass direction of the steepest downhill gradient |
| Slope | The steepness at each cell of a raster surface |
| Curvature | The slope of the slope |
| Plan Curvature | Curvature on horizontal (x) direction |
| Profile Curvature | Curvature on vertical (y) direction |
| Flow Direction | The direction of flow from every pixel in the raster |
| Flow Accumulation | Accumulated flow is the accumulated weight of all cells flowing into each downslope cell in the output raster |
| NDVI | It quantifies photosynthetically active vegetation (Equation (1)). The values range from −1 to 1. |
| NDRE | It quantifies levels of chlorophyll content. High values indicate photosynthetically active plants, with bare soil having low values (Equation (2)). The values range from −1 to 1. |
| NDWI | It estimates the leaf water content at canopy level (Equation (3)). The values range from −1 to 1. |
| Habitat Type | It contains the wetland type that was verified either in the field or through on-screen analysis. This variable is used as a response. |
| WETLAND TYPE | CLASSIFICATION METHOD | SENSITIVITY | SPECIFICITY | SITE |
|---|---|---|---|---|
| E2EM | MS | 88% | 84% | Surf City |
| MS | 86% | 90% | Masonboro | |
| QL2 | 94% | 97% | Surf City | |
| QL2 | 93% | 94% | Masonboro | |
| Quanergy | 94% | 95% | Surf City | |
| Quanergy | 92% | 95% | Masonboro | |
| QL2 + MS | 96% | 98% | Surf City | |
| QL2 + MS | 94% | 95% | Masonboro | |
| Quanergy + MS | 95% | 95% | Surf City | |
| Quanergy + MS | 94% | 96% | Masonboro | |
| PFO | MS | 52% | 85% | Maysville |
| MS | 86% | 77% | Surf City | |
| QL2 | 66% | 98% | RR | |
| QL2 | 95% | 93% | Maysville | |
| QL2 | 97% | 88% | Surf City | |
| Quanergy | 41% | 98% | RR | |
| Quanergy | 94% | 92% | Maysville | |
| Quanergy | 95% | 80% | Surf City | |
| QL2 + MS | 68% | 98% | RR | |
| QL2 + MS | 96% | 94% | Maysville | |
| QL2 + MS | 98% | 89% | Surf City | |
| Quanergy + MS | 42% | 98% | RR | |
| Quanergy + MS | 95% | 93% | Maysville | |
| Quanergy + MS | 95% | 82% | Surf City | |
| PEM | MS | 94% | 48% | RR |
| QL2 | 97% | 87% | RR | |
| Quanergy | 96% | 73% | RR | |
| QL2 + MS | 97% | 88% | RR | |
| Quanergy + MS | 96% | 75% | RR | |
| PSS | MS | 80% | 100% | Surf City |
| QL2 | 52% | 100% | Surf City | |
| Quanergy | 80% | 100% | Surf City | |
| QL2 + MS | 80% | 100% | Surf City | |
| Quanergy + MS | 87% | 100% | Surf City |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pricope, N.G.; Minei, A.; Halls, J.N.; Chen, C.; Wang, Y. UAS Hyperspatial LiDAR Data Performance in Delineation and Classification across a Gradient of Wetland Types. Drones 2022, 6, 268. https://doi.org/10.3390/drones6100268
Pricope NG, Minei A, Halls JN, Chen C, Wang Y. UAS Hyperspatial LiDAR Data Performance in Delineation and Classification across a Gradient of Wetland Types. Drones. 2022; 6(10):268. https://doi.org/10.3390/drones6100268
Chicago/Turabian StylePricope, Narcisa Gabriela, Asami Minei, Joanne Nancie Halls, Cuixian Chen, and Yishi Wang. 2022. "UAS Hyperspatial LiDAR Data Performance in Delineation and Classification across a Gradient of Wetland Types" Drones 6, no. 10: 268. https://doi.org/10.3390/drones6100268
APA StylePricope, N. G., Minei, A., Halls, J. N., Chen, C., & Wang, Y. (2022). UAS Hyperspatial LiDAR Data Performance in Delineation and Classification across a Gradient of Wetland Types. Drones, 6(10), 268. https://doi.org/10.3390/drones6100268