


Cooperative Obstacle-Aware Surveillance for Virtual Emotion Intelligence with Low Energy Configuration


 ,
,  and
and 
Abstract
1. Introduction
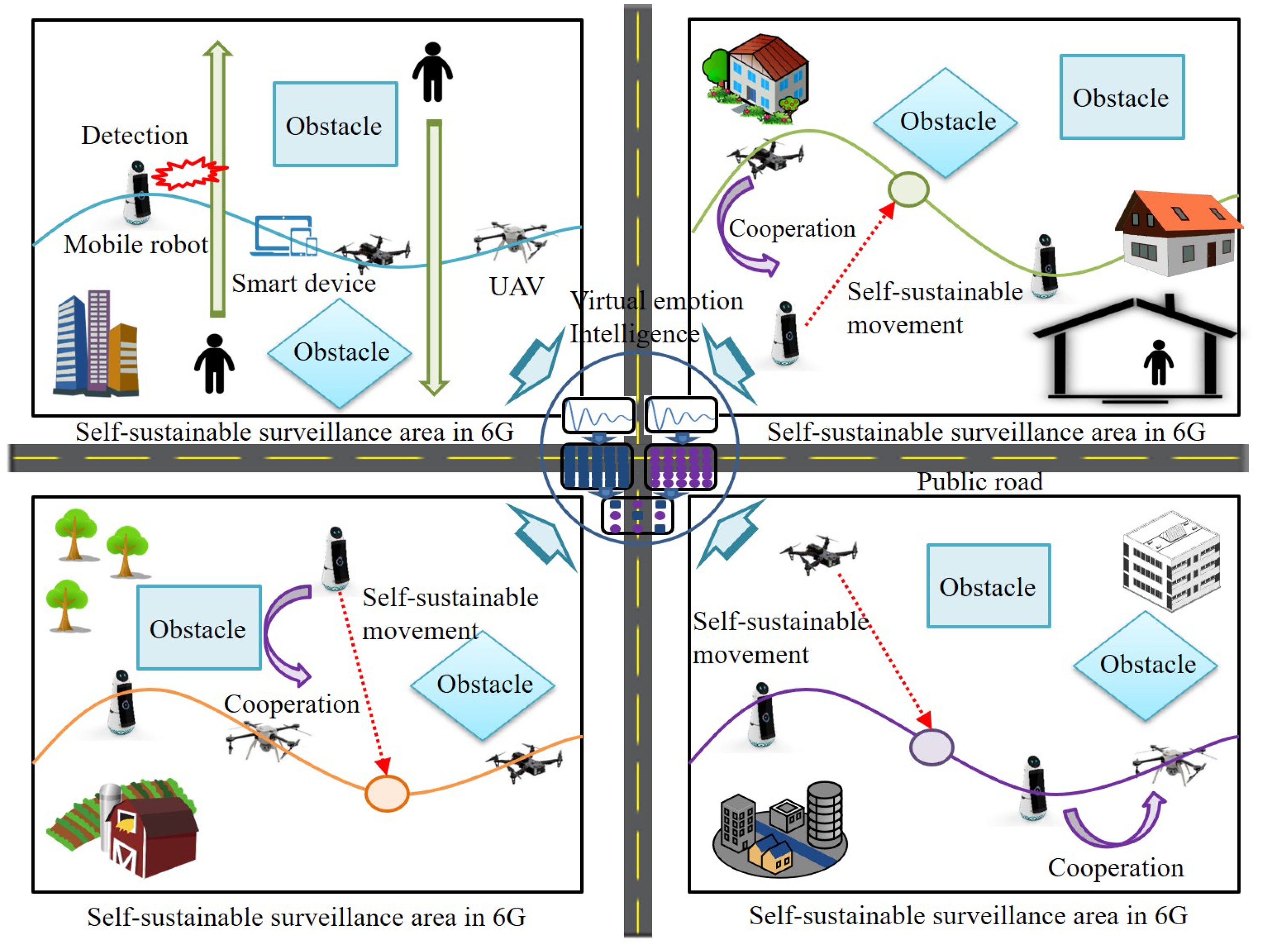
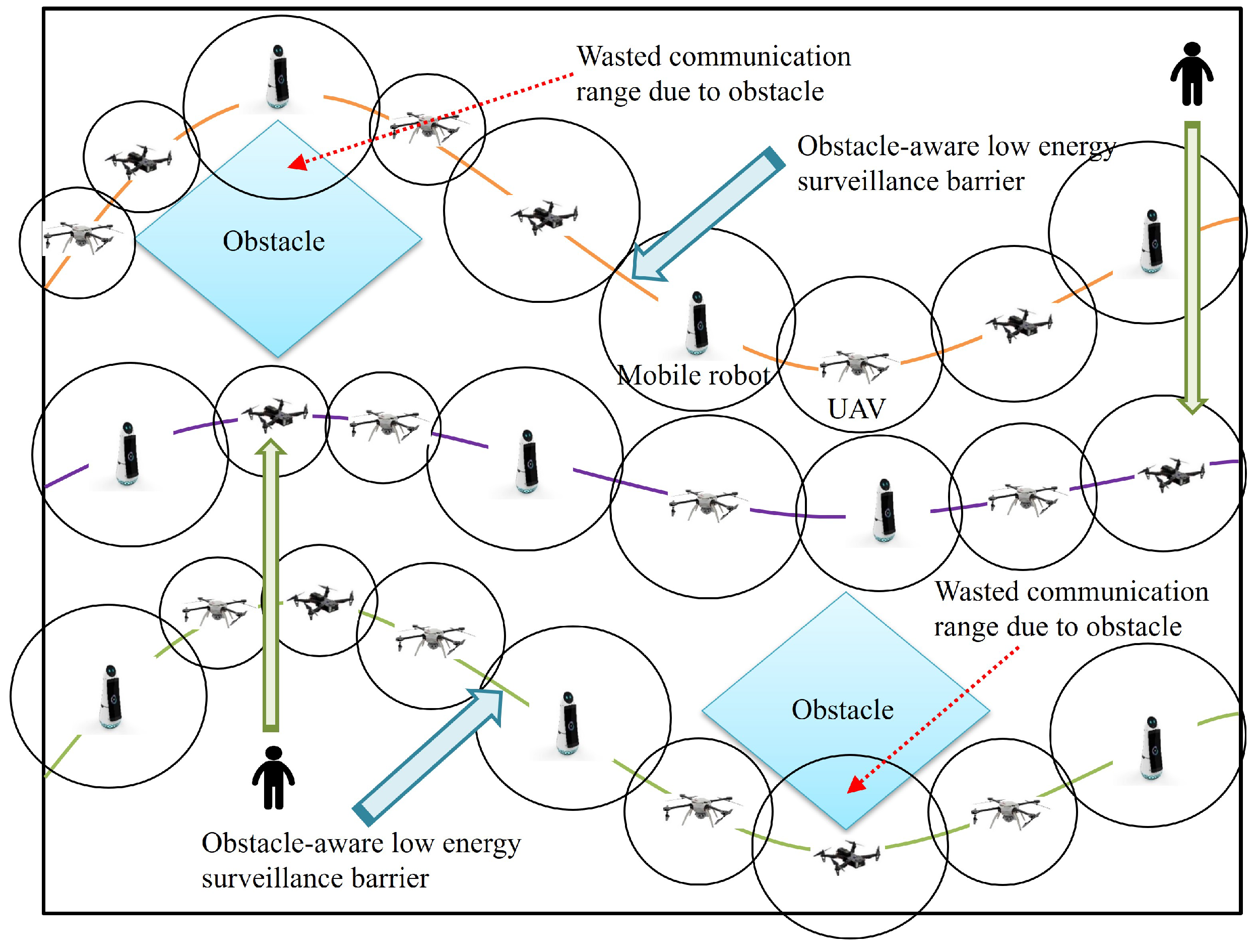
- We introduce a cooperative obstacle-aware surveillance framework with low energy configuration using system components with mobile robots and smart UAVs in 6G self-sustainable network. The devised innovative system essentially creates obstacle-aware low energy surveillance barriers to provide the enhanced detection accuracy in self-sustainable network.
- Also, we make a formal representation of the main research problem whose objective is to minimize the wasted communication ranges or the squandering space of system components so that the secure surveillance with low energy configuration is accomplished.
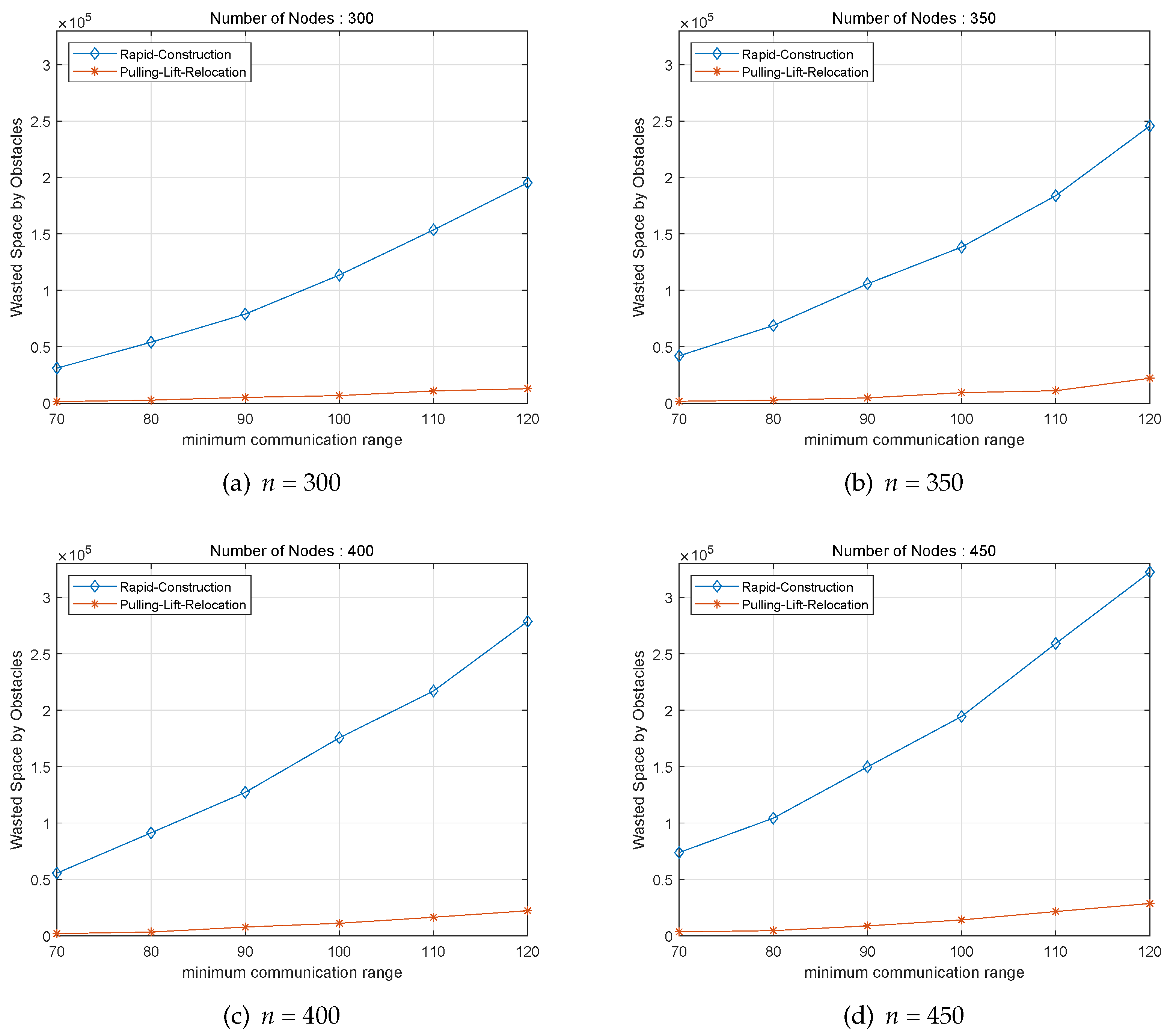
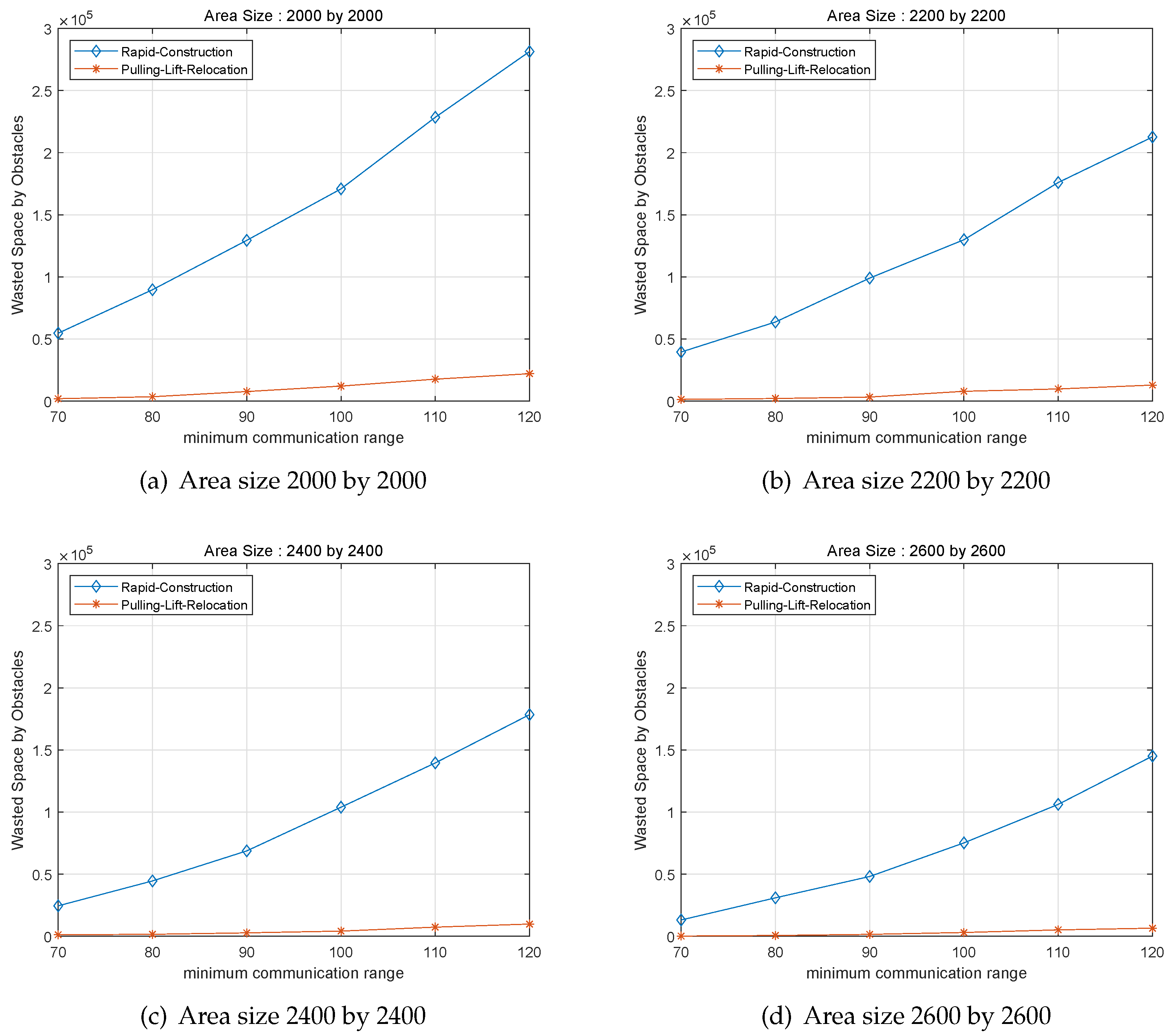
- To resolve the defined problem, two different schemes are developed originally and are simulated through extensive experiments with various settings and scenarios. Then, their performances based on obtained results are evaluated with detailed discussions and demonstrations.
2. Related Works
3. An Architecture of Cooperative Obstacle-Aware Surveillance with Low Energy Configuration
3.1. System Settings, Assumptions and Notations
- For system members or system nodes, the mobile robots and smart UAVs participating in the proposed architecture with self-sustainable movements both on the ground and in the air. Every mobile robot and smart UAV is equipped with front detection sensor, rear detection sensor, camera, wireless equipment for transmission and reception.
- The detected virtual emotion is recognized in the proposed system as five types including happiness, neutral, sorrow, anger, rage [41]. For the purpose of security, the emotion type of anger and rage are considered in the proposed system.
- The virtual emotion is detected by system members which are equipped with wireless signal, reflection and recognition procedures [26]. And, the detection accuracy depends on the distance or the overlapped area of communication or detection ranges between two system members.
- The detected virtual emotion data can be reported or be transmitted to other system members for system updates and maintenance in self-sustainable network.
- The whole monitoring area is considered as square-shaped region and the obstacle also has quadrilateral or lozenge-shaped where multiple number of obstacles are included in the requested surveillance region.
3.2. Obstacle-Aware Low Energy Surveillance Barriers
3.3. Problem Definition
4. Proposed Schemes
4.1. Algorithm 1: Rapid-Construction
- Verify n number of system members with their communication ranges C.
- Identify a set of obstacles O and their positions within S.
- Create a set of surveillance barriers T and confirm the required r number of surveillance barriers, referred as OaSLeBar.
- The below iterations are implemented until the required r number of obstacle-aware low energy surveillance barriers are found.
- -
- From left side border to right side border of S, search for obstacle-aware low energy surveillance barrier through Edmonds-Karp max-flow algorithm [42].
- -
- If an obstacle-aware low energy surveillance barrier is found such that satisfies the pair detection accuracy p, then add it to the set of obstacle-aware low energy surveillance barriers T.
- Estimate the wasted communication ranges or areas between the given obstacles and the found obstacle-aware low energy surveillance barriers.
- Update the estimated areas as and return it.
| Algorithm 1 Rapid-Construction |
|
4.2. Algorithm 2: Pulling-Lift-Relocation
- Validate n number of system members with their detection ranges C.
- Within self-sustainable surveillance area S, generate a set of OaSLeBar T with the requested r number to be formed.
- Then, the following sub-steps are iterated while the given r number of OaSLeBar are built in S.
- -
- -
- If a new OaSLeBar is found on condition that meets the pair detection accuracy p, add to the set of OaSLeBar T.
- Recognize the system members which has the maximum overlapped communication range with obstacles and make every pair of system member and matched obstacle.
- Also, the below sub-steps are iterated for all pairs.
- -
- For each pair between system member and obstacle , draw a virtual line between the center of system member and the center of obstacle.
- -
- Lift up or pull down the position of system member through virtual line to reduce the wasted communication range such that the connection and pair detection accuracy is maintained continuously.
- Calculate the current wasted communication ranges or areas for every pair between obstacles and system members in OaSLeBar.
- Update the estimated areas as and return it.
| Algorithm 2 Pulling-Lift-Relocation |
|
5. Performance Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAVs | Unmanned Aerial Vehicles |
| IIoT | Intelligent Internet of Things |
| OaSLeBar | obstacle-aware low energy surveillance barriers |
References
- Guo, H.; Li, J.; Liu, J.; Tian, N.; Kato, N. A survey on space-air-ground-sea integrated network security in 6G. IEEE Commun. Surv. Tutor. 2022, 24, 53–87. [Google Scholar] [CrossRef]
- Habibzadeh, H.; Kaptan, C.; Soyata, T.; Kantarci, B.; Boukerche, A. Smart city system design: A comprehensive study of the application and data planes. ACM Comput. Surv. 2019, 52, 1–38. [Google Scholar] [CrossRef]
- Hammi, B.; Zeadally, S.; Khatoun, R.; Nebhen, J. Survey on smart homes: Vulnerabilities, risks, and countermeasures. Comput. Secur. 2022, 117, 102677. [Google Scholar] [CrossRef]
- Tariq, F.; Khandaker, M.R.A.; Wong, K.; Imran, M.A.; Bennis, M.; Debbah, M. A speculative study on 6G. IEEE Wirel. Commun. 2020, 27, 118–125. [Google Scholar] [CrossRef]
- Dong, J.; Ota, K.; Dong, M. Why VR games Sickness? An empirical study of capturing and analyzing VR games head movement dataset. IEEE MultiMedia 2022, 29, 74–82. [Google Scholar] [CrossRef]
- Liao, S.; Wu, J.; Li, J.; Konstantin, K. Information-centric massive IoT-based ubiquitous connected VR/AR in 6G: A proposed caching consensus approach. IEEE Internet Things J. 2021, 8, 5172–5184. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Nauman, A.; Nguyen, T.N.; Qadri, Y.A.; Nain, Z.; Cengiz, K.; Kim, S.W. Artificial intelligence in beyond 5G and 6G reliable communications. IEEE Commun. Surv. Tutor. 2022, 5, 73–78. [Google Scholar] [CrossRef]
- Bouachir, O.; Aloqaily, M.; Özkasap, Ö.; Ali, F.S. FederatedGrids: Federated learning and blockchain-assisted P2P energy sharing. IEEE Trans. Green Commun. Netw. 2022, 6, 424–436. [Google Scholar] [CrossRef]
- Tseng, L.; Yao, X.; Otoum, S.; Aloqaily, M.; Jararweh, Y. Blockchain-based database in an IoT environment: Challenges, opportunities, and analysis. IEEE Trans. Green Commun. Netw. 2020, 23, 2151–2165. [Google Scholar] [CrossRef]
- Sodhro, A.H.; Gurtov, A.V.; Zahid, N.; Pirbhulal, S.; Wang, L.; Rahman, M.M.U.; Imran, M.A.; Abbasi, Q.H. Toward convergence of AI and IoT for energy-efficient communication in smart homes. IEEE Internet Things J. 2021, 8, 9664–9671. [Google Scholar] [CrossRef]
- Khan, W.U.; Javed, M.A.; Nguyen, T.N.; Khan, S.; ElHalawany, B.M. Energy-efficient resource allocation for 6G backscatter-enabled NOMA IoV networks. IEEE Trans. Intell. Transp. Syst. 2022, 23, 9775–9785. [Google Scholar] [CrossRef]
- Khan, W.U.; Jameel, F.; Jamshed, M.A.; Pervaiz, H.; Khan, S.; Liu, J. Efficient power allocation for NOMA-enabled IoT networks in 6G era. Phys. Commun. 2020, 39, 101043. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Maliatsos, K.; Skoutas, D.N.; Vouyioukas, D.; Skianis, C. Secure UAV-aided mobile edge computing for IoT: A review. IEEE Access 2022, 10, 86353–86383. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Miridakis, N.I.; Michalas, A.; Skondras, E.; Vergados, D.J.; Vergados, D.V. Energy optimization in massive MIMO UAV-aided MEC-enabled vehicular networks. IEEE Access 2021, 9, 117388–117403. [Google Scholar] [CrossRef]
- Michailidis, E.T.; Bithas, P.S.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. Outage probability analysis in multi-user FSO/RF and UAV-enabled MIMO communication networks. Phys. Commun. 2021, 49, 101475. [Google Scholar] [CrossRef]
- Nomikos, N.; Michailidis, E.T.; Nomikos, N.; Trakadas, P.; Vouyioukas, D.; Karl, H.; Martrat, J.; Zahariadis, T.B.; Papadopoulos, K.; Voliotis, S. A UAV-based moving 5G RAN for massive connectivity of mobile users and IoT devices. Veh. Commun. 2020, 25, 100250. [Google Scholar] [CrossRef]
- Armeniakos, C.K.; Bithas, P.S.; Kanatas, A.G. Finite point processes in a truncated octahedron-based 3D UAV network. IEEE Trans. Veh. Technol. 2022, 71, 7230–7243. [Google Scholar] [CrossRef]
- Bithas, P.S.; Nikolaidis, V.; Kanatas, A.G.; Karagiannidis, G.K. UAV-to-Ground Communications: Channel Modeling and UAV Selection. IEEE Trans. Commun. 2020, 68, 5135–5144. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J. A successive epidemic prevention infrastructure using mobile robots and smart devices in intelligent public area. IEEE Commun. Lett. 2022, 26, 692–695. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Lim, H.; Rachedi, A.; Lakas, A. Synchronizing UAV teams for timely data collection and energy transfer by deep reinforcement learning. IEEE Trans. Veh. Technol. 2022, 71, 6682–6697. [Google Scholar] [CrossRef]
- Ansari, N.; Zhang, L. Flexible backhaul-aware DBS-aided HetNet with IBFD communications. ICT Express 2020, 6, 48–56. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J.; Hwang, K.; Choi, B. Intelligent aerial-ground surveillance and epidemic prevention with discriminative public and private services. IEEE Netw. 2022, 36, 40–46. [Google Scholar] [CrossRef]
- Ren, T.; Niu, J.; Dai, B.; Liu, X.; Hu, Z.; Xu, M.; Guizani, M. Enabling efficient scheduling in large-scale UAV-assisted mobile-edge computing via hierarchical reinforcement learning. IEEE Internet Things J. 2022, 9, 7095–7109. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J.; Cho, S.; Mokdad, L. A framework for IoT-enabled virtual emotion detection in advanced smart cities. IEEE Netw. 2019, 33, 142–148. [Google Scholar] [CrossRef]
- Zhao, M.; Adib, F.; Katabi, D. Emotion recognition using wireless signals. Commun. ACM 2018, 61, 91–100. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J.; Mokdad, L.; Son, J.; Li, C. Research challenges and security threats to AI-driven 5G virtual emotion applications using autonomous vehicles, drones, and smart devices. IEEE Netw. 2020, 34, 288–294. [Google Scholar] [CrossRef]
- Kim, H.; Ben-Othman, J.; Mokdad, L.; Bellavista, P. A virtual emotion detection architecture with two-way enabled delay bound toward evolutional emotion-based IoT services. IEEE Trans. Mob. Comput. 2022, 21, 1172–1181. [Google Scholar] [CrossRef]
- Zhou, P.; Wang, C.; Yang, Y.; Boulanger-Lewandowski, N. Design of self-sustainable wireless sensor networks with energy harvesting and wireless charging. ACM Trans. Sens. Netw. 2021, 17, 1–38. [Google Scholar] [CrossRef]
- Gratch, S.; Marsella, S. Evaluating a computational model of emotion. J. Auton. Agents Multiagent Syst. 2005, 11, 23–43. [Google Scholar] [CrossRef]
- Chmiel, A.; Sienkiewicz, J.; Thelwall, M.; Paltoglou, G.; Buckley, K.; Kappas, A.; Holyst, J.A. Collective emotions online and their influence on community life. PLoS ONE 2011, 6, e22207. [Google Scholar] [CrossRef] [PubMed]
- Suk, M.; Prabhakaran, B. Real-time mobile facial expression recognition system—A case study. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 132–137. [Google Scholar]
- Kahou, S.E.; Bouthillier, X.; Lamblin, P.; Gulcehre, C.; Michalski, V.; Konda, K.; Jean, S.; Froumentt, P.; Dauphin, Y.; Dauphin, Y. Emonets: Multimodal deep learning approaches for emotion recognition in video. J. Multimodal User Interfaces 2015, 11, 99–111. [Google Scholar] [CrossRef]
- Agrafioti, F.; Hatzinakos, D.; Anderson, A.K. ECG pattern analysis for emotion detection. IEEE Trans. Affect. Comput. 2012, 3, 102–115. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-Free human activity recognition using commercial WiFi devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Kumar, S.; Lai, T.H.; Posner, M.E.; Sinha, P. Maximizing the lifetime of a barrier of wireless sensors. IEEE Trans. Mob. Comput. 2010, 9, 1161–1172. [Google Scholar] [CrossRef]
- Li, L.; Zhang, B.; Shen, X.; Zheng, J.; Yao, Z. A study on the weak barrier coverage problem in wireless sensor networks. Comput. Networks 2011, 55, 711–721. [Google Scholar] [CrossRef]
- Kim, H.; Oh, H.; Bellavista, P.; Ben-Othman, J. Constructing event-driven partial barriers with resilience in wireless mobile sensor networks. J. Netw. Comput. Appl. 2017, 82, 77–92. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, H.; Cao, Q.; Qi, H.; Wang, Z.; Wang, Q. Achieving location error tolerant barrier coverage for wireless sensor networks. Comput. Networks 2017, 112, 314–328. [Google Scholar] [CrossRef]
- Lee, S.; Lee, S.; Kim, H. Differential security barriers for virtual emotion detection in maritime transportation stations with cooperative mobile robots and UAVs. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2461–2471. [Google Scholar] [CrossRef]
- Gonzalez, H.A.; George, R.; Muzaffar, S.; Acevedo, J.; Höppner, S.; Mayr, C.; Yoo, J.; Fitzek, F.H.P.; Elfadel, I.M. Hardware acceleration of EEG-based emotion classification systems: A comprehensive survey. IEEE Trans. Biomed. Circuits Syst. 2021, 15, 412–442. [Google Scholar] [CrossRef]
- Lammich, P.; Sefidgar, S.R. Formalizing the Edmonds-Karp algorithm. In Interactive Theorem Proving; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2016; Volume 7, pp. 22–25. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Description |
|---|---|
| S | a square-shaped surveillance area |
| M | a set of system members |
| O | a set of obstacles |
| C | a set of system member communication ranges |
| T | a set of obstacle-aware low energy surveillance barriers |
| n | the number of system members in the architecture |
| p | the required minimum pair detection accuracy |
| q | the number of obstacles |
| r | the requested number of surveillance barriers |
| h | an identifier of surveillance barrier, where |
| i | an identifier of member, where |
| j | an identifier of member, where |
| k | an identifier of obstacle, where |
| the wasted communication ranges |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Lee, S.; Choi, Y.; Son, J.; Bellavista, P.; Kim, H. Cooperative Obstacle-Aware Surveillance for Virtual Emotion Intelligence with Low Energy Configuration. Drones 2023, 7, 159. https://doi.org/10.3390/drones7030159
Lee S, Lee S, Choi Y, Son J, Bellavista P, Kim H. Cooperative Obstacle-Aware Surveillance for Virtual Emotion Intelligence with Low Energy Configuration. Drones. 2023; 7(3):159. https://doi.org/10.3390/drones7030159
Chicago/Turabian StyleLee, Seungheyon, Sooeon Lee, Yumin Choi, Junggab Son, Paolo Bellavista, and Hyunbum Kim. 2023. "Cooperative Obstacle-Aware Surveillance for Virtual Emotion Intelligence with Low Energy Configuration" Drones 7, no. 3: 159. https://doi.org/10.3390/drones7030159
APA StyleLee, S., Lee, S., Choi, Y., Son, J., Bellavista, P., & Kim, H. (2023). Cooperative Obstacle-Aware Surveillance for Virtual Emotion Intelligence with Low Energy Configuration. Drones, 7(3), 159. https://doi.org/10.3390/drones7030159