
Performance Analysis of Distributed Reconfigurable-Intelligent-Surface-Assisted Air–Ground Fusion Networks with Non-Ideal Environments




Abstract
:1. Introduction
- A distributed RIS-assisted air–ground fusion network model (referred as k2_RIS) is proposed. This model utilizes a UAV as an aerial base station, and deploys RISs on multiple buildings to establish a distributed RIS-assisted UAV communication link. To quantify the impact of user positions on the outage probability, ergodic rate, and energy efficiency, the model integrates stochastic geometry to capture the random nature of network topology, assuming that the user distribution follows a binomial distribution (BBP) and analyzing the impact of random users on system performance.
- Addressing the realistic challenges anticipated in future air–ground fusion networks, non-ideal factors such as hardware impairments and imperfect channels are proposed. In response to the high-intensity and high-saturation hardware operations in future urban networks, hardware impairments are considered for all nodes except the RIS, accounting for potential hardware impairments in user devices and UAV base stations. Additionally, a UAV base station hovering in the air may be influenced by aerial airflow, causing the UAV to experience slight distance oscillations. Hence, the impact of imperfect channels on the model is taken into account. These non-ideal factors are designed to address real-world issues in UAV communication networks, enhancing the applicability to practical scenarios.
- The performance metrics of the outage probability, ergodic rate, and energy efficiency with non-ideal environments with Nakagami-m fading channels in distributed RIS-assisted air–ground fusion networks are analyzed. To emphasize the superior characteristics of distributed RIS-assisted air–ground networks, point-to-point (P2P) link systems between users, AF relaying, conventional centralized RIS deployment, and distributed RIS air–ground fusion networks without hardware impairments are employed as benchmarks. Under non-ideal environmental conditions, the distributed RIS-assisted air–ground fusion network exhibits superior system performance compared to the benchmark scenarios. Simulation experiments were conducted to validate the proposed solution and theoretical analysis.
2. System Model for Distributed RIS-Assisted Air–Ground Fusion Network
2.1. Signal Model
2.2. Signal-to-Interference Plus-Noise Ratio Model
3. Performance Analysis of Distributed RIS-Assisted Air–Ground Fusion Networks with Non-Ideal Environments
3.1. User Distribution
3.2. Outage Probability
3.2.1. The Outage Probability of the Direct Link
3.2.2. The Outage Probability of the Cascaded Link
3.3. Ergodic Rate
3.3.1. The Ergodic Rate of the Direct Link
3.3.2. The Ergodic Rate of the Cascaded Link
3.4. Energy Efficiency
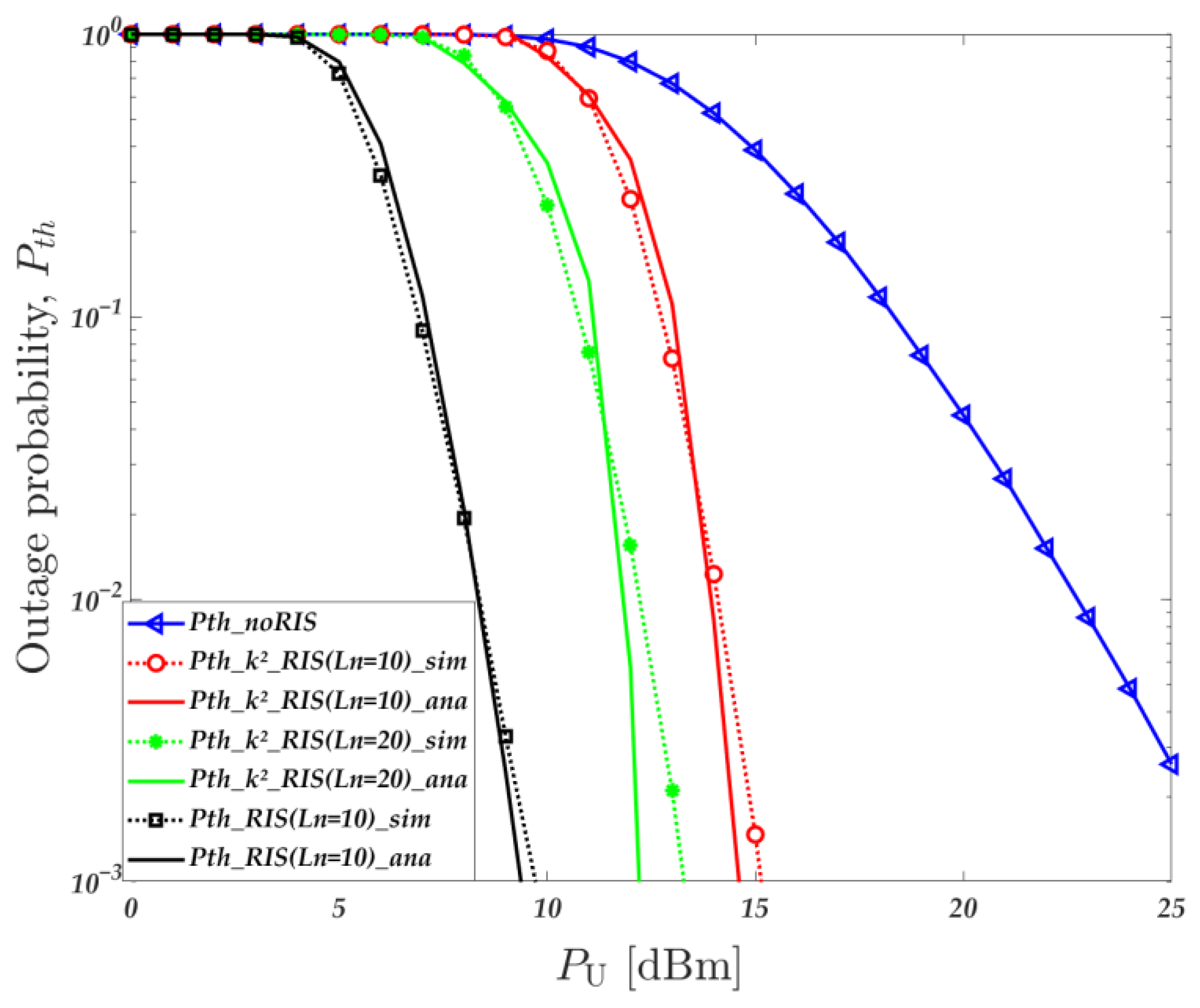
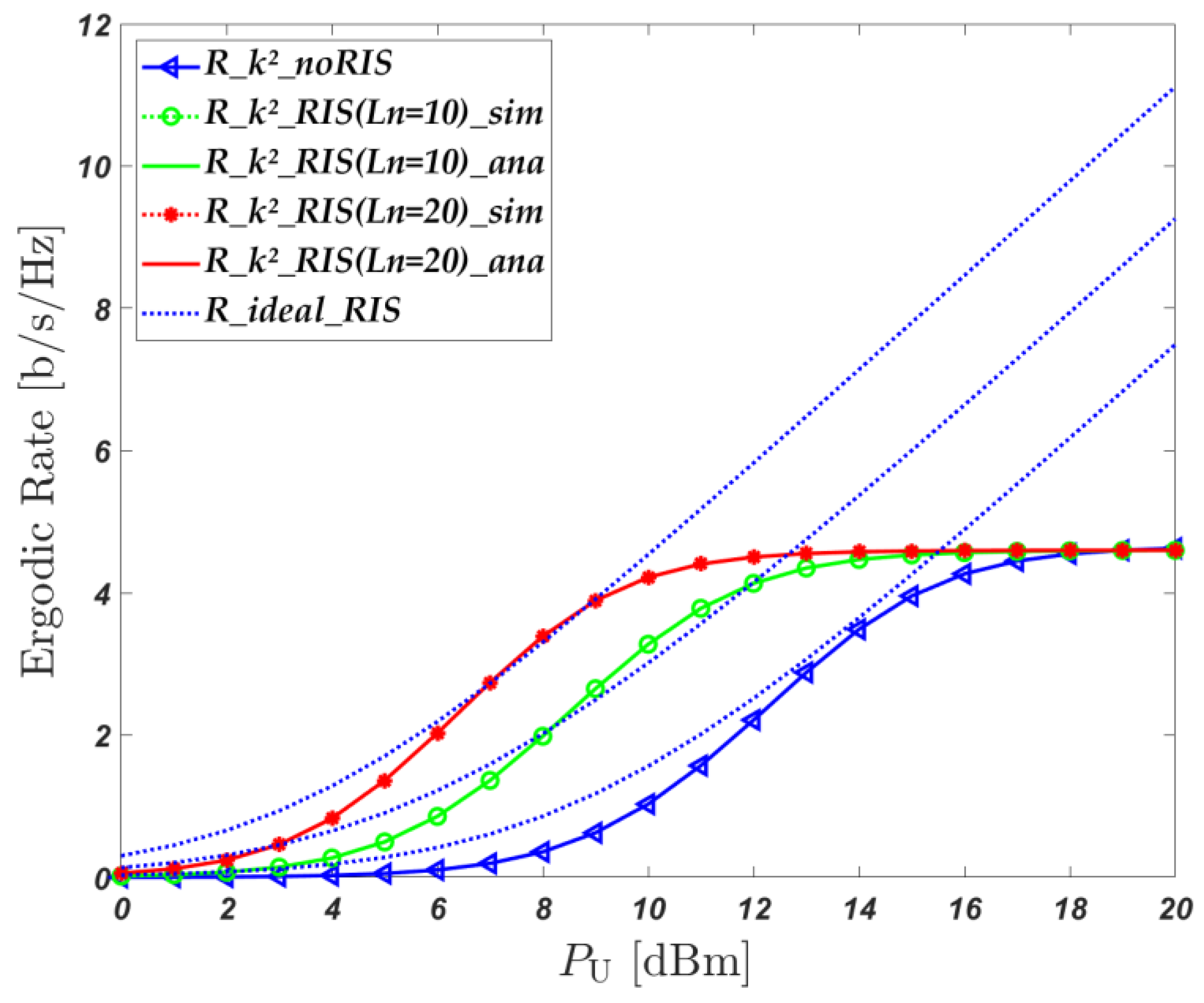
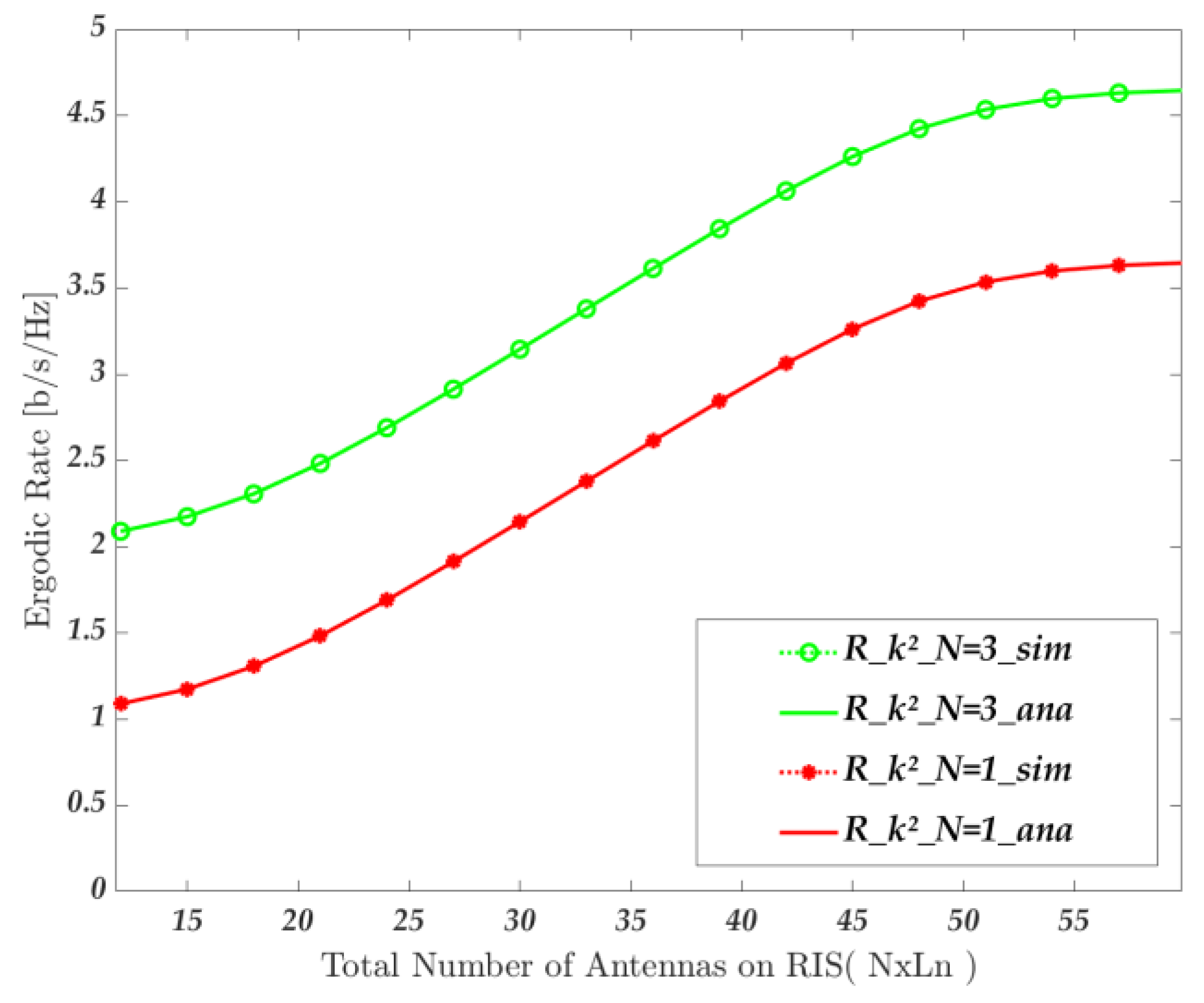
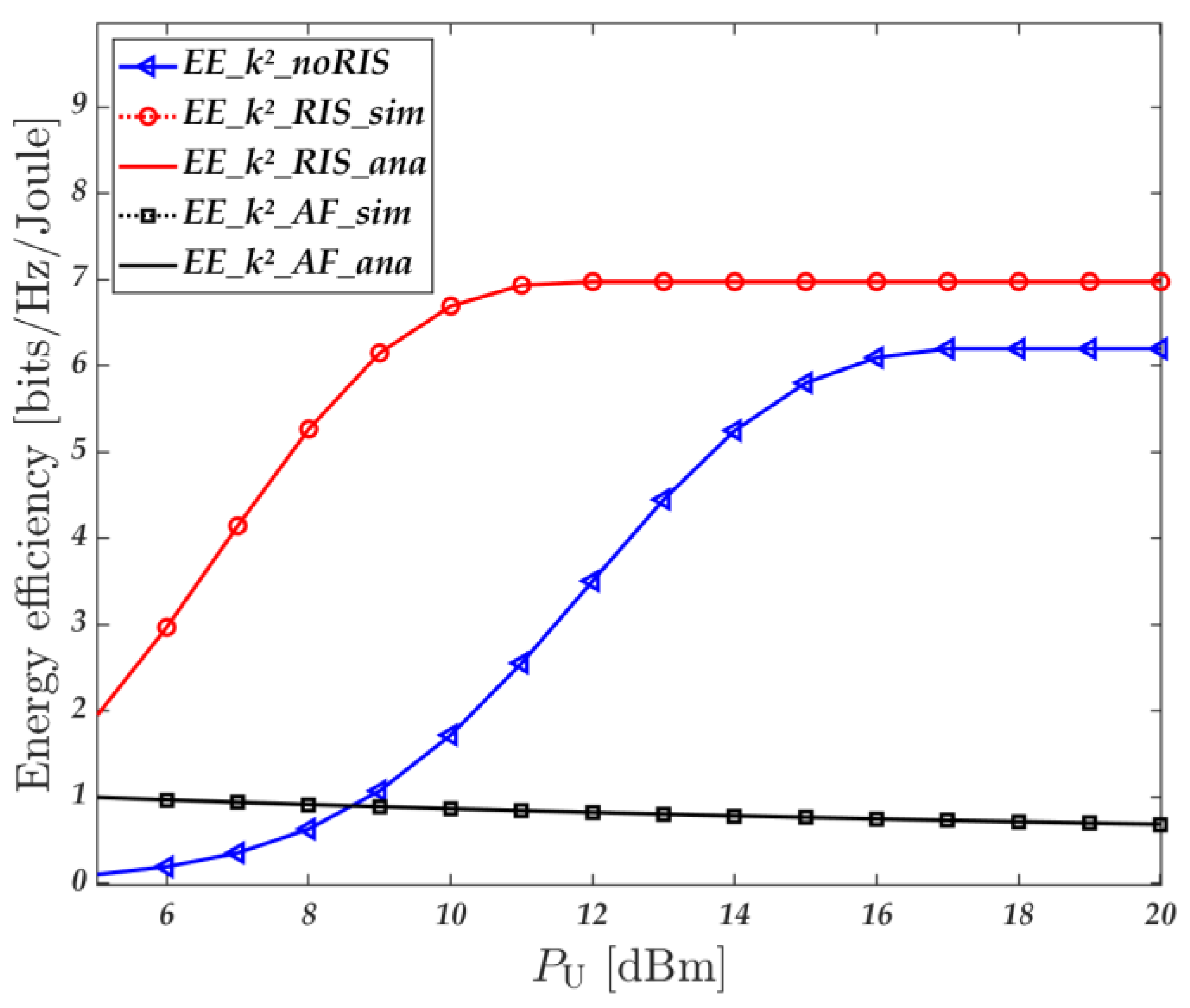
4. Simulation Results
- Communication scheme of distributed RIS-assisted air–ground fusion network considering non-ideal factors as discussed in this paper. This scheme is named k2_RIS;
- Direct link communication scheme from the UAV base station to user. This scheme is named k2_noRIS [24];
- Ideal conditions scheme not considering non-ideal environments (hardware damage, imperfect channels, and random user. This scheme is named ideal _RIS [14];
- Communication scheme using AF relay but with hardware impairments for the UAV base station and user. This scheme is named AF_ k2 [39].
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| RIS | Reconfigurable intelligent surface |
| UAV | Unmanned aerial vehicle |
| 5G | Fifth Generation |
| 6G | Sixth Generation |
| HI | Hardware impairments |
| BPP | Binomial point process |
| CSI | Channel state information |
References
- Bertin, E.; Crespi, N.; Magedanz, T. Future 6G Networks: Needs, Impacts, and Technologies; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2021; pp. 12–52. [Google Scholar]
- Yu, K.; Yu, J.; Luo, C. The Impact of Mobility on Physical Layer Security of 5G IoT Networks. IEEE/ACM Trans. Netw. 2023, 31, 1042–1055. [Google Scholar] [CrossRef]
- Elmossallamy, M.A.; Zhang, H.; Song, L.; Seddik, K.G.; Han, Z.; Li, G. Reconfigurable intelligent surfaces for wireless communications: Principles, challenges, and opportunities. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 990–1002. [Google Scholar] [CrossRef]
- Renzo, M.D.; Zappone, A.; Debbah, M.; Alouini, M.; Yuen, C.; Rosny, J.D.; Tretyakov, S.A. Smart radio environments empowered by reconfigurable intelligent surfaces: How it works, state of research, and the roadahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Başar, E.; Di Renzo, M.; de Rosny, J.; Debbah, M.; Alouini, M.; Zhang, R. Wireless communications through reconfigurable intelligent surfaces. IEEE Access 2019, 7, 116753–116773. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, R. Capacity Characterization for Intelligent Reflecting Surface Aided MIMO Communication. IEEE J. Sel. Areas Commun. 2020, 38, 1823–1838. [Google Scholar] [CrossRef]
- Yang, Y.; Zheng, B.; Zhang, S.; Zhang, R. Intelligent Reflecting Surface Meets OFDM: Protocol Design and Rate Maximization. IEEE Trans. Commun. 2020, 68, 4522–4535. [Google Scholar] [CrossRef]
- Yue, X.; Xie, J.; Ouyang, C.; Liu, Y.; Shen, X.; Ding, Z. Active Simultaneously Transmitting and Reflecting Surface Assisted NOMA Networks. arXiv 2024, arXiv:2401.14219. [Google Scholar]
- Yue, X.; Song, M.; Ouyang, C.; Liu, Y.; Li, T.; Hou, T. Exploiting Active RIS in NOMA Networks with Hardware Impairments. arXiv 2024, arXiv:2311.14295. [Google Scholar]
- Liu, X.; Xu, X.; Yu, K. NOMA and UAV Scheduling for Ultra-Reliable and Low-Latency Communications. Drones 2023, 7, 41. [Google Scholar] [CrossRef]
- Mei, W.; Zhang, R. Cooperative beam routing for multi-IRS aided communication. IEEE Wireless Commun. Lett. 2021, 10, 426–430. [Google Scholar] [CrossRef]
- Di Renzo, M.; Ntontin, K.; Song, J.; Danufane, F.H.; Qian, X.; Lazarakis, F.I.; de Rosny, J.; Phan-Huy, D.; Simeone, O.; Zhang, R.; et al. Reconfigurable Intelligent Surfaces vs. Relaying: Differences, Similarities, and Performance Comparison. IEEE Open J. Commun. Soc. 2019, 1, 798–807. [Google Scholar] [CrossRef]
- Gao, Y.; Xu, J.; Xu, W.; Ng, D.W.; Alouini, M. Distributed IRS with statistical passive beamforming for MISO communications. IEEE Wirel. Commun. Lett. 2021, 10, 221–225. [Google Scholar] [CrossRef]
- Do, T.; Kaddoum, G.; Nguyen, T.; Costa, D.B.; Haas, Z.J. Multi-RIS-aided wireless systems: Statistical characterization and performance analysis. IEEE Trans. Commun. 2021, 69, 8641–8658. [Google Scholar] [CrossRef]
- Yao, Y.; Lv, K.; Ma, N.; Yue, X.; Qin, X.; Yun, X. Energy efficient air-to-ground communication networks with reconfigurable intelligent surface. J. Commun. Netw. 2022, 24, 555–565. [Google Scholar] [CrossRef]
- Yao, Y.; Lv, K.; Huang, S.; Li, X.; Xiang, W. UAV Trajectory and Energy Efficiency Optimization in RIS-Assisted Multi-User Air-to-Ground Communications Networks. Drones 2023, 7, 272. [Google Scholar] [CrossRef]
- Shang, B.; Shafin, R.S.; Liu, L. UAV Swarm-Enabled Aerial Reconfigurable Intelligent Surface (SARIS). IEEE Wirel. Commun. 2021, 28, 156–163. [Google Scholar] [CrossRef]
- Li, Y.; Aghvami, A.H.; Dong, D. Path Planning for Cellular-Connected UAV: A DRL Solution with Quantum-Inspired Experience Replay. IEEE Trans. Wirel. Commun. 2022, 21, 7897–7912. [Google Scholar] [CrossRef]
- Li, Y.; Aghvami, A.H. Radio Resource Management for Cellular-Connected UAV: A Learning Approach. IEEE Trans. Commun. 2023, 71, 2784–2800. [Google Scholar] [CrossRef]
- Shang, B.; Liu, L.; Ma, J.; Fan, P.; Unmanned Shang, B.; Shafin, R.S.; Liu, L. Unmanned aerial vehicle meets vehicle-to-everything in secure communications. IEEE Commun. Mag. 2019, 57, 98–103. [Google Scholar] [CrossRef]
- Hua, M.; Yang, L.; Wu, Q.; Swindlehurst, A.L. 3D UAV trajectory and communication design for simultaneous uplink and downlink transmission. IEEE Trans. Commun. 2020, 68, 5908–5923. [Google Scholar] [CrossRef]
- Li, S.; Duo, B.; Yuan, X.; Liang, Y.; Di Renzo, M. Reconfigurable intelligent surface assisted UAV communication: Joint trajectory design and passive beamforming. IEEE Wirel. Commun. Lett. 2020, 9, 716–720. [Google Scholar] [CrossRef]
- Guo, J.; Yu, L.; Chen, Z.; Yao, Y.; Wang, Z.; Wang, Z.; Zhao, Q. RIS-assisted secure UAV communications with resource allocation and cooperative jamming. IET Commun. 2022, 16, 1582–1592. [Google Scholar] [CrossRef]
- Tran, P.T.; Nguyen, B.C.; Hoang, T.M.; Le, X.H.; Nguyen, V.D. Exploiting Multiple RISs and Direct Link for Performance Enhancement of Wireless Systems with Hardware Impairments. IEEE Trans. Commun. 2022, 70, 5599–5611. [Google Scholar] [CrossRef]
- Nguyen, B.C.; The Dung, L.; Hoang, T.M.; Tran, X.N.; Kim, T. Impacts of imperfect CSI and transceiver hardware noise on the performance of full-duplex DF relay system with multi-antenna terminals over Nakagami-m fading channels. IEEE Trans. Commun. 2021, 69, 7094–7107. [Google Scholar] [CrossRef]
- Papasotiriou, E.N.; Boulogeorgos, A.-A.-A.; Alexiou, A. Performance analysis of THz wireless systems in the presence of antenna misalignment and phase noise. IEEE Commun. Lett. 2020, 24, 1211–1215. [Google Scholar] [CrossRef]
- Papazafeiropoulos, A.K.; Sharma, S.K.; Ratnarajah, T.; Chatzinotas, S. Impact of residual additive transceiver hardware impairments on Rayleigh-product MIMO channels with linear receivers: Exact and asymptotic analyses. IEEE Trans. Commun. 2018, 66, 105–118. [Google Scholar] [CrossRef]
- Hou, T.; Liu, Y.; Song, Z.; Sun, X.; Chen, Y.; Hanzo, L.H. MIMO Assisted Networks Relying on Intelligent Reflective Surfaces: A Stochastic Geometry Based Analysis. IEEE Trans. Veh. Technol. 2022, 71, 571–582. [Google Scholar] [CrossRef]
- Haenggi, M. Stochastic Geometry for Wireless Networks; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Andrews, J.G.; Baccelli, F.; Ganti, R.K. A tractable approach to coverage and rate in cellular networks. IEEE Trans. Commun. 2011, 59, 3122–3134. [Google Scholar] [CrossRef]
- Kishk, M.A.; Alouini, M. Exploiting randomly located blockages for large-scale deployment of intelligent surfaces. IEEE J. Sel. Areas Commun. 2021, 39, 1043–1056. [Google Scholar] [CrossRef]
- Singh, S.K.; Agrawal, K.; Singh, K.; Li, C.; Ding, Z. NOMA Enhanced Hybrid RIS-UAV-Assisted Full-Duplex Communication System with Imperfect SIC and CSI. IEEE Trans. Commun. 2022, 70, 7609–7627. [Google Scholar] [CrossRef]
- Fontán, F.P.; Espiñeira, P.M. Modelling the Wireless Propagation Channel: A Simulation Approach with MATLAB; Wiley Publishing: Hoboken, NJ, USA, 2008. [Google Scholar]
- Ntontin, K.; Song, J.; Renzo, M.D. Multi-antenna relaying and reconfigurable intelligent surfaces: End-to-end SNR and achievable rate. arXiv 2019, arXiv:1908.07967. [Google Scholar]
- Liu, H.; Yuan, X.; Jun, Y. Matrix-calibration-based cascaded channel estimation for reconfigurable intelligent surface assisted multiuser MIMO. IEEE J. Sel. Areas Commun. 2020, 11, 2621–2636. [Google Scholar] [CrossRef]
- Jeffrey, A.; Zwillinger, D. Table of Integrals, Series, and Products; Academic: New York, NY, USA, 2007. [Google Scholar]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Peebles, P.Z. Random Variables and Random Signal Principles, 4th ed.; McGraw-Hill: New York, NY, USA, 2000. [Google Scholar]
- Zan, J.; Lu, G.; Ye, Y. Outage performance of UAV-assisted AF relaying with hardware impairments. Phys. Commun. 2021, 46, 101334. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| N | Number of RISs |
| Ln | Number of RIS reflecting elements |
| h0, hn, gn | The channel gains for the UAV-USER, UAV-RIS, RIS-USER |
| d1, d2,n, d3,n | The distance for UAV-USER, UAV-RIS, RIS-USER |
| Λ | Path loss exponent |
| N0 | Gaussian white noise |
| Ne1 | Noise caused by imperfect channels in UAV-USER links |
| Ne2 | Noise caused by imperfect channels in UAV-RIS links |
| k2 | HI level |
| r0, R | The inner and outer parameters of the annulus |
| m | The shape parameter indicating the severity of fading |
| Ω | The extended parameter of the distribution |
| Simulation Parameters | Value |
|---|---|
| Path loss exponent | 3 |
| The number of RISs | N = 3 |
| The power consumption of the user | P1 = 10 dBm |
| The power consumption of RIS element | PRIS = 1 dBm |
| The radius of disc | R = 10 m r0 = 1 m |
| Bandwidth | 100 MHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Liu, Q.; Yu, K.; Huang, S.; Yue, X. Performance Analysis of Distributed Reconfigurable-Intelligent-Surface-Assisted Air–Ground Fusion Networks with Non-Ideal Environments. Drones 2024, 8, 271. https://doi.org/10.3390/drones8060271
Yao Y, Liu Q, Yu K, Huang S, Yue X. Performance Analysis of Distributed Reconfigurable-Intelligent-Surface-Assisted Air–Ground Fusion Networks with Non-Ideal Environments. Drones. 2024; 8(6):271. https://doi.org/10.3390/drones8060271
Chicago/Turabian StyleYao, Yuanyuan, Qi Liu, Kan Yu, Sai Huang, and Xinwei Yue. 2024. "Performance Analysis of Distributed Reconfigurable-Intelligent-Surface-Assisted Air–Ground Fusion Networks with Non-Ideal Environments" Drones 8, no. 6: 271. https://doi.org/10.3390/drones8060271
APA StyleYao, Y., Liu, Q., Yu, K., Huang, S., & Yue, X. (2024). Performance Analysis of Distributed Reconfigurable-Intelligent-Surface-Assisted Air–Ground Fusion Networks with Non-Ideal Environments. Drones, 8(6), 271. https://doi.org/10.3390/drones8060271