
Robust Nonlinear Control with Estimation of Disturbances and Parameter Uncertainties for UAVs and Integrated Brushless DC Motors

 ,
,  ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Detailed mathematical models of the UAV and its brushless DC motors are presented, highlighting the relationship between them and providing a robust foundation for control design.
- A dual-loop control system is developed, with an inner loop managing the UAV’s actuators and an outer loop controlling the UAV’s frame to ensure precise position tracking through motor control.
- A robust position control design is implemented, integrating control for the UAV and its motors, and incorporating estimation and compensation of external disturbances and parameter variations.
- The proposed control strategies are validated through numerical simulations in both Simulink® and PX4 Autopilot environments, demonstrating effectiveness across different UAV platforms and operational scenarios.
2. Mathematical Model
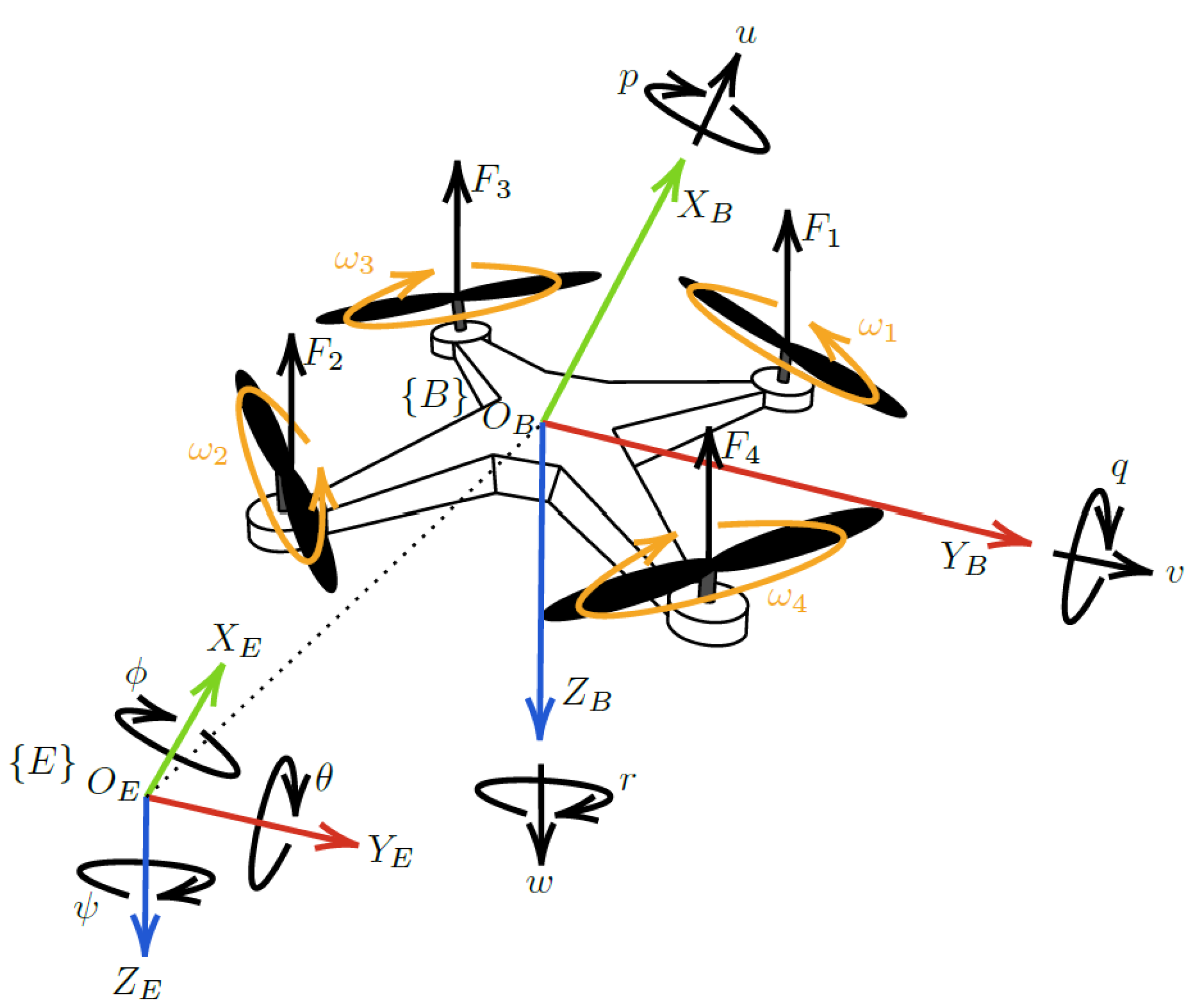
2.1. UAV Dynamic Model
2.2. Actuators Dynamic Model
3. Design of a Nonlinear Control with Perfectly Known Parameters
3.1. UAV Controller
3.2. Actuators Controller
4. Design of a Robust Nonlinear Control with Estimation of Disturbances and Parameter Uncertainties
4.1. UAV Robust Control with Disturbance Estimation
4.2. Closed Loop Stability in UAV
4.2.1. Subsystems S1 and S4
4.2.2. Subsystems S2 and S3
4.3. Actuators Robust Control with Disturbance Estimation
4.4. Closed Loop Stability in Actuators
5. Simulations Results
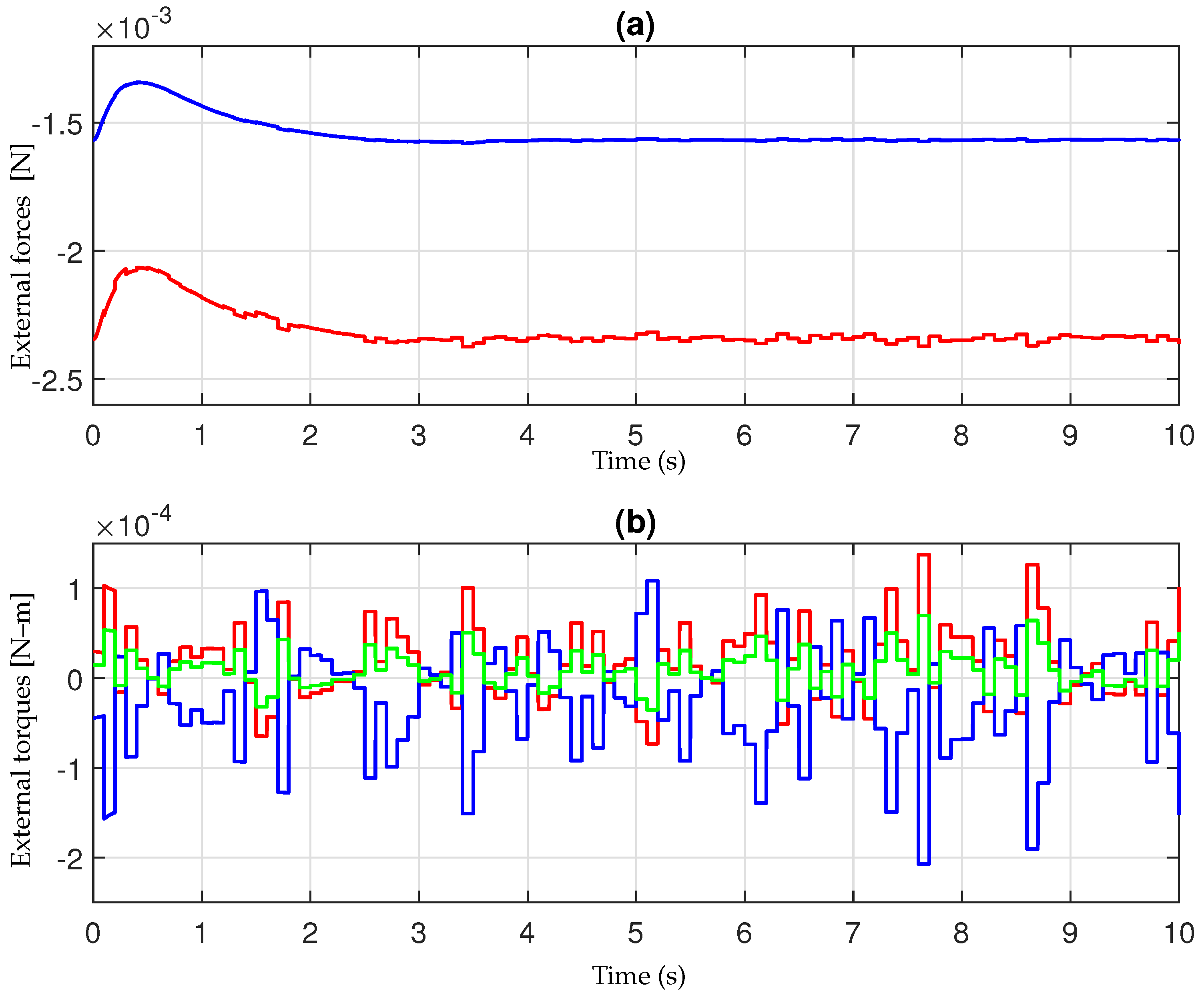
5.1. Environmental Disturbances Acting on the Quadrotor
- 1.
- Lateral wind components (x and y) have a more significant impact on UAV behavior compared to vertical wind components (z).
- 2.
- Reducing the model’s complexity facilitates the design and implementation of the controller.
- 3.
- Vertical wind components are typically smaller and less perturbative, making this a reasonable and accurate assumption for most UAV operational scenarios.
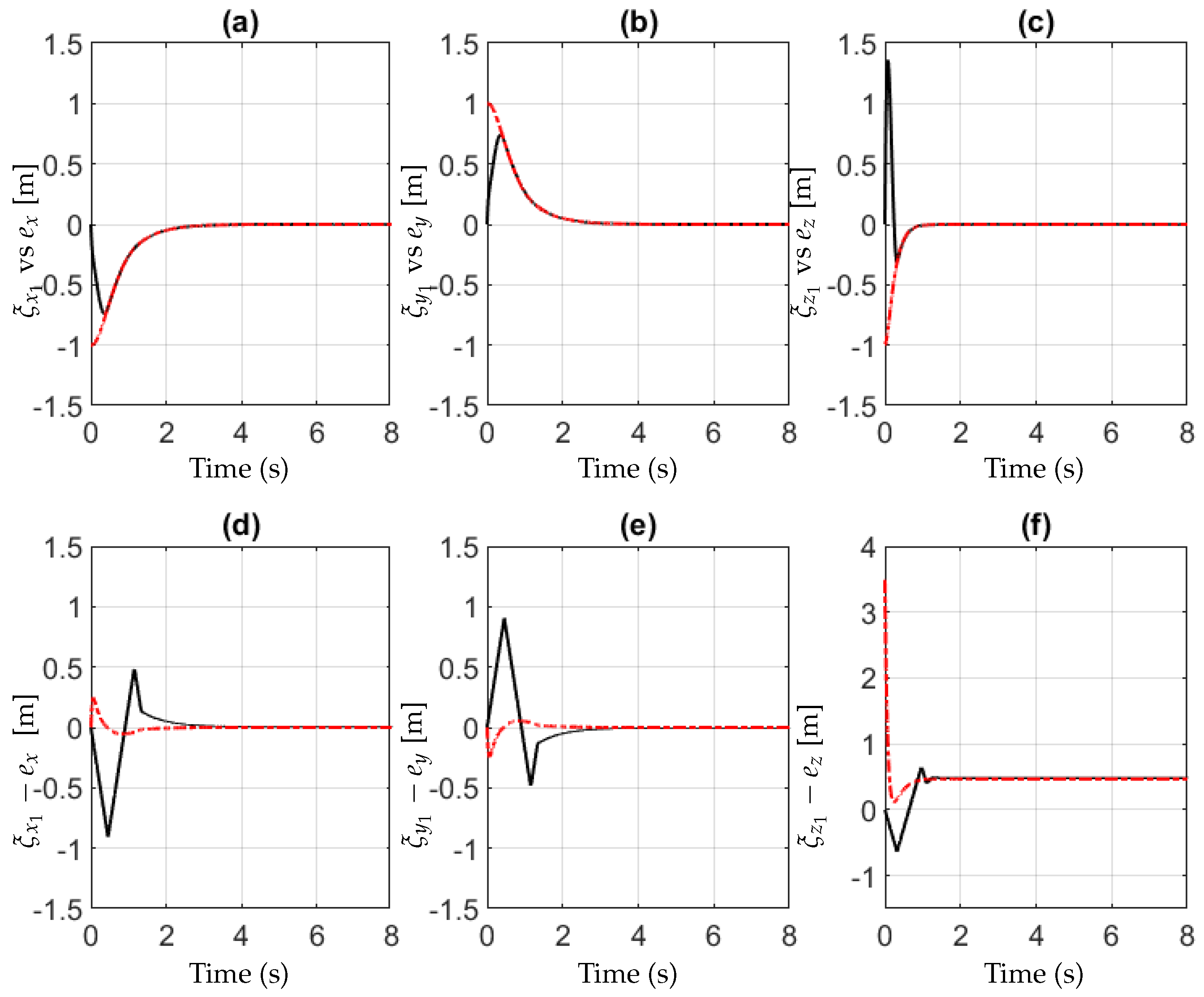
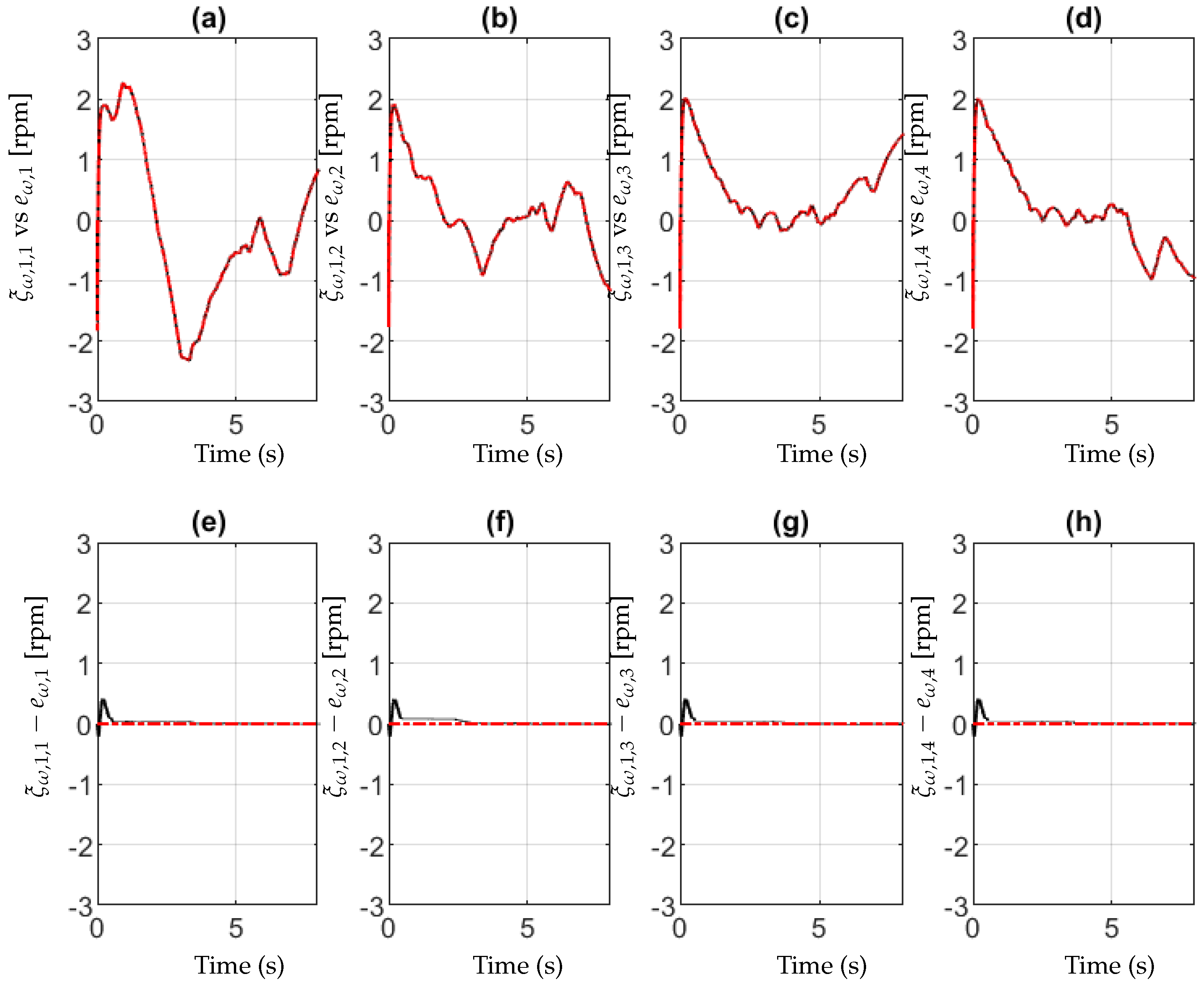
5.2. Simulation Results of Simulink®
5.3. Simulation Results of PX4 Autopilot Environment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the advent of the twenties: Where we stand and what is next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar] [CrossRef]
- Sivakumar, M.; Tyj, N.M. A literature survey of unmanned aerial vehicle usage for civil applications. J. Aerosp. Technol. Manag. 2021, 13, e4021. [Google Scholar] [CrossRef]
- Syed, F.; Gupta, S.K.; Hamood Alsamhi, S.; Rashid, M.; Liu, X. A survey on recent optimal techniques for securing unmanned aerial vehicles applications. Trans. Emerg. Telecommun. Technol. 2021, 32, e4133. [Google Scholar] [CrossRef]
- Alvares, P.; Silva, L.; Magaia, N. Blockchain-based solutions for UAV-assisted connected vehicle networks in smart cities: A review, open issues, and future perspectives. Telecom 2021, 2, 108–140. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, J. Techniques, answers, and real-world UAV implementations for precision farming. Wirel. Pers. Commun. 2023, 131, 2715–2746. [Google Scholar] [CrossRef]
- Budiyono, A.; Higashino, S.-I. A review of the latest innovations in UAV technology. J. Instrum. Autom. Syst. 2023, 10, 7–16. [Google Scholar] [CrossRef]
- Lopez-Sanchez, I.; Moreno-Valenzuela, J. PID control of quadrotor UAVs: A survey. Annu. Rev. Control 2023, 56, 100900. [Google Scholar] [CrossRef]
- Rinaldi, M.; Primatesta, S.; Guglieri, G. A comparative study for control of quadrotor UAVs. Appl. Sci. 2023, 13, 3464. [Google Scholar] [CrossRef]
- Maaruf, M.; Mahmoud, M.S.; Ma’arif, A. A survey of control methods for quadrotor UAV. Int. J. Robot. Control Syst. 2022, 2, 652–665. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Mung, N.X.; Thanh, H.L.N.N.; Huynh, T.T.; Lam, N.T.; Hong, S.K. Adaptive sliding mode control for attitude and altitude system of a quadcopter UAV via neural network. IEEE Access 2021, 9, 40076–40085. [Google Scholar] [CrossRef]
- Baek, J.; Kang, M. A synthesized sliding-mode control for attitude trajectory tracking of quadrotor UAV systems. IEEE/ASME Trans. Mechatronics 2023, 28, 2189–2199. [Google Scholar] [CrossRef]
- Shao, X.; Sun, G.; Yao, W.; Liu, J.; Wu, L. Adaptive sliding mode control for quadrotor UAVs with input saturation. IEEE/ASME Trans. Mechatronics 2021, 27, 1498–1509. [Google Scholar] [CrossRef]
- Noordin, A.; Mohd Basri, M.A.; Mohamed, Z.; Mat Lazim, I. Adaptive PID controller using sliding mode control approaches for quadrotor UAV attitude and position stabilization. Arab. J. Sci. Eng. 2021, 46, 963–981. [Google Scholar] [CrossRef]
- Koksal, N.; An, H.; Fidan, B. Backstepping-based adaptive control of a quadrotor UAV with guaranteed tracking performance. ISA Trans. 2020, 105, 98–110. [Google Scholar] [CrossRef]
- Wang, J.; Alattas, K.A.; Bouteraa, Y.; Mofid, O.; Mobayen, S. Adaptive finite-time backstepping control tracker for quadrotor UAV with model uncertainty and external disturbance. Aerosp. Sci. Technol. 2023, 133, 108088. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R. Antisaturation command filtered backstepping control-based disturbance rejection for a quadarotor UAV. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3577–3581. [Google Scholar] [CrossRef]
- Bao, C.; Guo, Y.; Luo, L.; Su, G. Design of a fixed-wing UAV controller based on adaptive backstepping sliding mode control method. IEEE Access 2021, 9, 157825–157841. [Google Scholar] [CrossRef]
- Xu, L.X.; Ma, H.J.; Guo, D.; Xie, A.H.; Song, D.L. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV. IEEE/ASME Trans. Mechatronics 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Kazim, M.; Azar, A.T.; Koubaa, A.; Zaidi, A. Disturbance-rejection-based optimized robust adaptive controllers for UAVs. IEEE Syst. J. 2021, 15, 3097–3108. [Google Scholar] [CrossRef]
- Zhou, L.; Xu, S.; Jin, H.; Jian, H. A hybrid robust adaptive control for a quadrotor UAV via mass observer and robust controller. Adv. Mech. Eng. 2021, 13, 16878140211002723. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, B.; Zheng, Z. Robust adaptive control for a quadrotor UAV with uncertain aerodynamic parameters. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 8313–8326. [Google Scholar] [CrossRef]
- Ristevski, S.; Koru, A.T.; Yucelen, T.; Dogan, K.M.; Muse, J.A. Experimental results of a quadrotor UAV with a model reference adaptive controller in the presence of unmodeled dynamic. In Proceedings of the AIAA Scitech 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1381. [Google Scholar] [CrossRef]
- García, O.; Ordaz, P.; Santos-Sánchez, O.J.; Salazar, S.; Lozano, R. Backstepping and robust control for a quadrotor in outdoors environments: An experimental approach. IEEE Access 2019, 7, 40636–40648. [Google Scholar] [CrossRef]
- Islam, S.; Liu, P.X.; El Saddik, A. Robust control of four-rotor unmanned aerial vehicle with disturbance uncertainty. IEEE Trans. Ind. Electron. 2014, 62, 1563–1571. [Google Scholar] [CrossRef]
- Bianchi, D.; Di Gennaro, S.; Di Ferdinando, M.; Acosta Lúa, C. Robust control of UAV with disturbances and uncertainty estimation. Machines 2023, 11, 352. [Google Scholar] [CrossRef]
- Xia, K.; Shin, M.; Chung, W.; Kim, M.; Lee, S.; Son, H. Landing a quadrotor UAV on a moving platform with sway motion using robust control. Control Eng. Pract. 2022, 128, 105288. [Google Scholar] [CrossRef]
- Din, A.F.U.; Mir, I.; Gul, F.; Al Nasar, M.R.; Abualigah, L. Reinforced learning-based robust control design for unmanned aerial vehicle. Arab. J. Sci. Eng. 2023, 48, 1221–1236. [Google Scholar] [CrossRef]
- Zhao, Z.; Cao, D.; Yang, J.; Wang, H. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics. Nonlinear Dyn. 2020, 102, 2583–2596. [Google Scholar] [CrossRef]
- Chandra, A.; Lal, P.P.S. Higher order sliding mode controller for a quadrotor UAV with a suspended load. IFAC-PapersOnLine 2022, 55, 610–615. [Google Scholar] [CrossRef]
- COMP4DRONES. Agriculture Use Case—COMP4DRONES Project. Available online: https://www.comp4drones.eu/project-info/use-cases/agriculture/ (accessed on 24 June 2024).
- NASA. UAS Traffic Management (UTM) Project. Available online: https://www.nasa.gov/directorates/armd/past-armd-projects/uas-traffic-management-utm-project/ (accessed on 24 June 2024).
- Fethalla, N.; Saad, M.; Michalska, H.; Ghommam, J. Robust observer-based dynamic sliding mode controller for a quadrotor UAV. IEEE Access 2018, 6, 45846–45859. [Google Scholar] [CrossRef]
- Sanwale, J.; Dahiya, S.; Trivedi, P.; Kothari, M. Robust fault-tolerant adaptive integral dynamic sliding mode control using finite-time disturbance observer for coaxial octorotor UAVs. Control Eng. Pract. 2023, 135, 105495. [Google Scholar] [CrossRef]
- Ha, L.N.N.T.; Hong, S.K. Robust dynamic sliding mode control-based PID–super twisting algorithm and disturbance observer for UAVs. Electronics 2019, 8, 760. [Google Scholar] [CrossRef]
- Wei, M.; Zheng, L.; Li, H.; Cheng, H. Adaptive Neural Network-based Model Path-Following Contouring Control for Quadrotor Under Diversely Uncertain Disturbances. IEEE Robot. Autom. Lett. 2024. [Google Scholar] [CrossRef]
- Madebo, M.M.; Abdissa, C.M.; Lemma, L.N.; Negash, D.S. Robust Tracking Control for Quadrotor UAV with External Disturbances and Uncertainties Using Neural Network Based MRAC. IEEE Access 2024, 12, 36183–36201. [Google Scholar] [CrossRef]
- Verberne, J.; Moncayo, H. Robust control architecture for wind rejection in quadrotors. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 152–161. [Google Scholar] [CrossRef]
- Wan, K.; Gao, X.; Hu, Z.; Wu, G. Robust motion control for UAV in dynamic uncertain environments using deep reinforcement learning. Remote Sens. 2020, 12, 640. [Google Scholar] [CrossRef]
- Wan, K.; Li, B.; Gao, X.; Hu, Z.; Yang, Z. A learning-based flexible autonomous motion control method for UAV in dynamic unknown environments. J. Syst. Eng. Electron. 2021, 32, 1490–1508. [Google Scholar] [CrossRef]
- Mayorga-Macías, W.A.; González-Jiménez, L.E.; Meza-Aguilar, M.A.; Luque-Vega, L.F. Velocity Sensor for Real-Time Backstepping Control of a Multirotor Considering Actuator Dynamics. Sensors 2020, 20, 4229. [Google Scholar] [CrossRef]
- Wang, B.; Ghamry, K.A.; Zhang, Y. Trajectory tracking and attitude control of an unmanned quadrotor helicopter considering actuator dynamics. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; IEEE: New York, NY, USA, 2016; pp. 10795–10800. [Google Scholar] [CrossRef]
- Di, J.; Kang, Y.; Ji, H.; Wang, X.; Chen, S.; Liao, F.; Li, K. Low-level control with actuator dynamics for multirotor UAVs. Robot. Intell. Autom. 2023, 43, 290–300. [Google Scholar] [CrossRef]
- Ferry, N. Quadcopter Plant Model and Control System Development with MATLAB/Simulink Implementation. Ph.D. Thesis, Rochester Institute of Technology, Rochester, NY, USA, 2017. Available online: http://www.ritravvenlab.com/uploads/1/1/8/4/118484574/ferry.pdf (accessed on 24 June 2024).
- Bouabdallah, S. Design and Control of Quadrotors with Application to Autonomous Flying. Ph.D. Thesis, École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland, 2007. Available online: https://infoscience.epfl.ch/record/95939?v=pdf (accessed on 24 June 2024).
- Mayorga-Macías, W.A. Embedded Control System for a Multi-Rotor Considering Motor Dynamics. Ph.D. Thesis, ITESO—Universidad Jesuita de Guadalajara, San Pedro Tlaquepaque, Mexico, 2020. Available online: https://rei.iteso.mx/items/6cd58f47-b751-4033-ae7f-1d3657d6c258 (accessed on 24 June 2024).
- ArduPilot Dev Team. Connect ESCs and Motors. Available online: https://ardupilot.org/copter/docs/connect-escs-and-motors.html (accessed on 6 March 2024).
- Cárdenas R, C.A.; Grisales, V.H.; Collazos Morales, C.A.; Cerón-Muñoz, H.D.; Ariza-Colpas, P.; Caputo-Llanos, R. Quadrotor modeling and a pid control approach. In Proceedings of the Intelligent Human Computer Interaction: 11th International Conference, IHCI 2019, Allahabad, India, 12–14 December 2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 281–291. [Google Scholar] [CrossRef]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2024. [Google Scholar]
- Choi, J.; Cheon, D.; Lee, J. Robust landing control of a quadcopter on a slanted surface. Int. J. Precis. Eng. Manuf. 2021, 22, 1147–1156. [Google Scholar] [CrossRef]
- Guillén-Bonilla, J.T.; Vaca García, C.C.; Di Gennaro, S.; Sánchez Morales, M.E.; Acosta Lúa, C. Vision-Based Nonlinear Control of Quadrotors Using the Photogrammetric Technique. Math. Probl. Eng. 2020, 2020, 5146291. [Google Scholar] [CrossRef]
- Acosta Lúa, C.; Vaca García, C.C.; Di Gennaro, S.; Castillo-Toledo, B.; Sánchez Morales, M.E. Real-Time Hovering Control of Unmanned Aerial Vehicles. Math. Probl. Eng. 2020, 2020, 2314356. [Google Scholar] [CrossRef]
- Schneider, E.E.; Dale, T. Guidelines for Manned Space Flight Experiments; NASA: Washington, DC, USA, 1971. Available online: https://ntrs.nasa.gov/api/citations/19710016459/downloads/19710016459.pdf (accessed on 6 March 2024).
- Nagaty, A.; Saeedi, S.; Thibault, C.; Seto, M.; Li, H. Control and navigation framework for quadrotor helicopters. J. Intell. Robot. Syst. 2013, 70, 1–12. [Google Scholar] [CrossRef]
- NASA Glenn Research Center. Drag Equation. Available online: https://www1.grc.nasa.gov/beginners-guide-to-aeronautics/drag-equation/ (accessed on 6 March 2024).
- Gonzalez-Sierra, J.; Dzul, A.; Martinez, E. Formation control of distance and orientation based-model of an omnidirectional robot and a quadrotor UAV. Robot. Auton. Syst. 2022, 147, 103921. [Google Scholar] [CrossRef]
- Morbidi, F.; Cano, R.; Lara, D. Minimum-energy path generation for a quadrotor UAV. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: New York, NY, USA, 2016; pp. 1492–1498. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Saddle River, NJ, USA, 2006. [Google Scholar]
- MathWorks. UAV Toolbox Support Package for PX4 Autopilots. Available online: https://la.mathworks.com/help/uav/px4-spkg.html?s_tid=CRUX_topnav (accessed on 24 June 2024).











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vera Vaca, C.V.; Di Gennaro, S.; Vaca García, C.C.; Acosta Lúa, C. Robust Nonlinear Control with Estimation of Disturbances and Parameter Uncertainties for UAVs and Integrated Brushless DC Motors. Drones 2024, 8, 447. https://doi.org/10.3390/drones8090447
Vera Vaca CV, Di Gennaro S, Vaca García CC, Acosta Lúa C. Robust Nonlinear Control with Estimation of Disturbances and Parameter Uncertainties for UAVs and Integrated Brushless DC Motors. Drones. 2024; 8(9):447. https://doi.org/10.3390/drones8090447
Chicago/Turabian StyleVera Vaca, Claudia Verónica, Stefano Di Gennaro, Claudia Carolina Vaca García, and Cuauhtémoc Acosta Lúa. 2024. "Robust Nonlinear Control with Estimation of Disturbances and Parameter Uncertainties for UAVs and Integrated Brushless DC Motors" Drones 8, no. 9: 447. https://doi.org/10.3390/drones8090447