
Recent Development Trends in Plant Protection UAVs: A Journey from Conventional Practices to Cutting-Edge Technologies—A Comprehensive Review

 and
and
Abstract
:1. Introduction
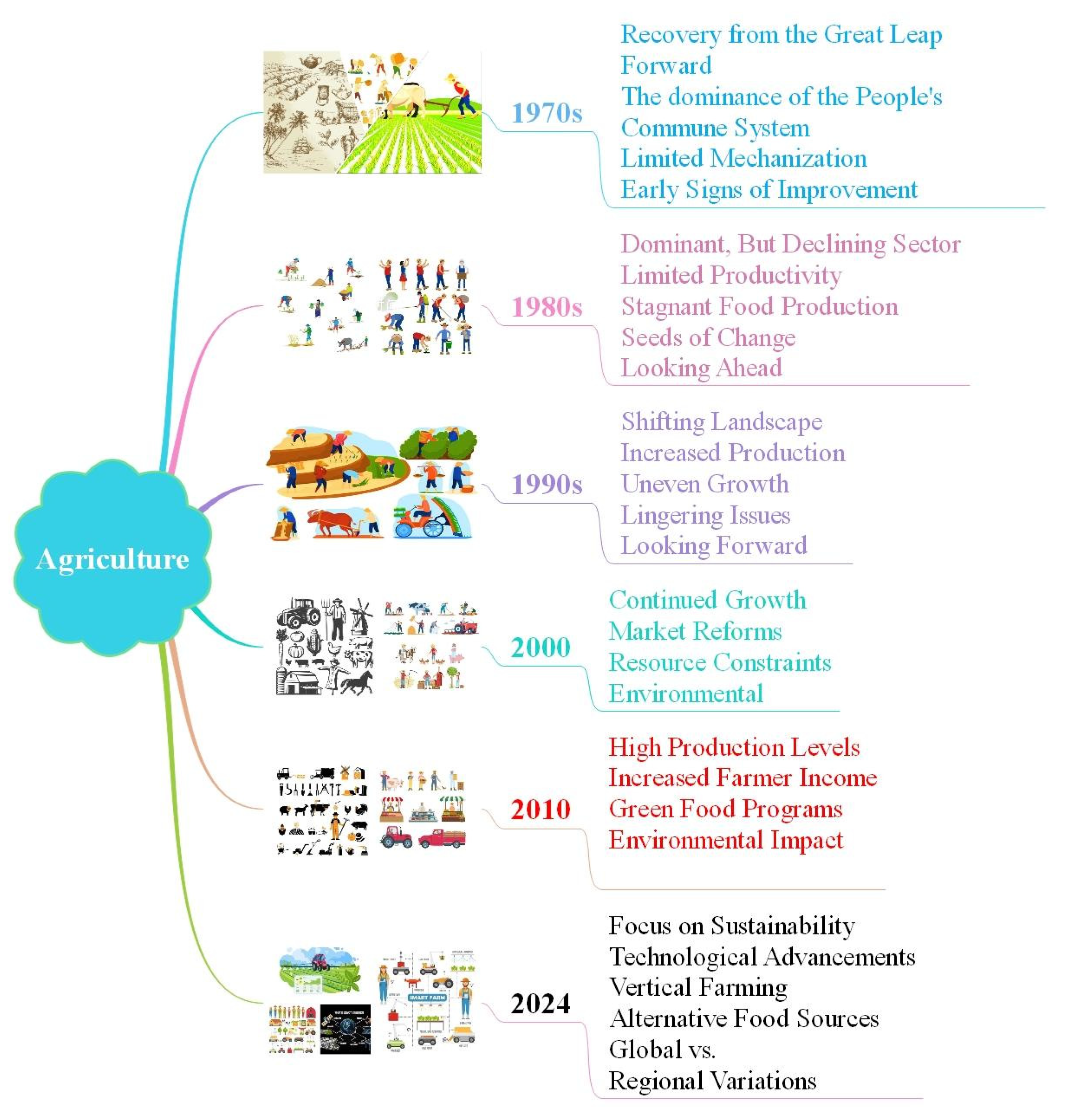
2. A Historical Voyage through Agriculture’s Status and Innovations
2.1. Evolutionary Journey of UAVs in Agriculture Development across Decades
2.2. From Dust to Sky: The Evolutionary Leap in Agriculture
2.3. Classifications of Plant Protection UAVs
2.4. Mapping the Current Terrain of Plant Protection
2.5. The Role and Impact of UAVs in Modern Agriculture and Scientific Research
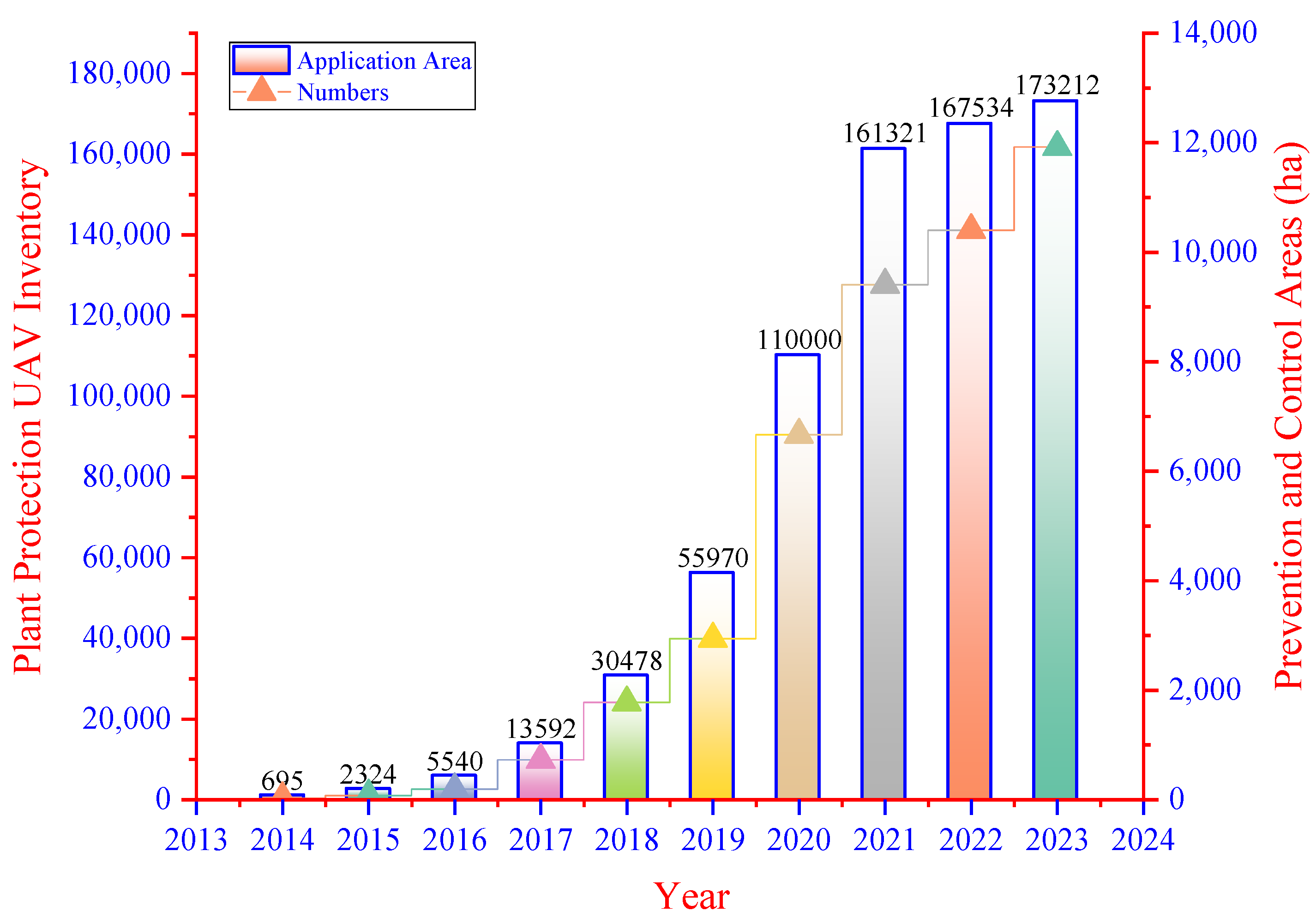
3. Adoption Trends in Plant Protection UAVs
4. The Operational Milestones of UAVs in China
The Operational Milestones of UAVs in Diverse Cropping Systems
5. Vital Role of Automation Technologies
5.1. Development and Modifications in UAV Spraying Systems
5.2. Flight Durations and Payload Capacities
5.3. Navigation Systems and UAV Applications
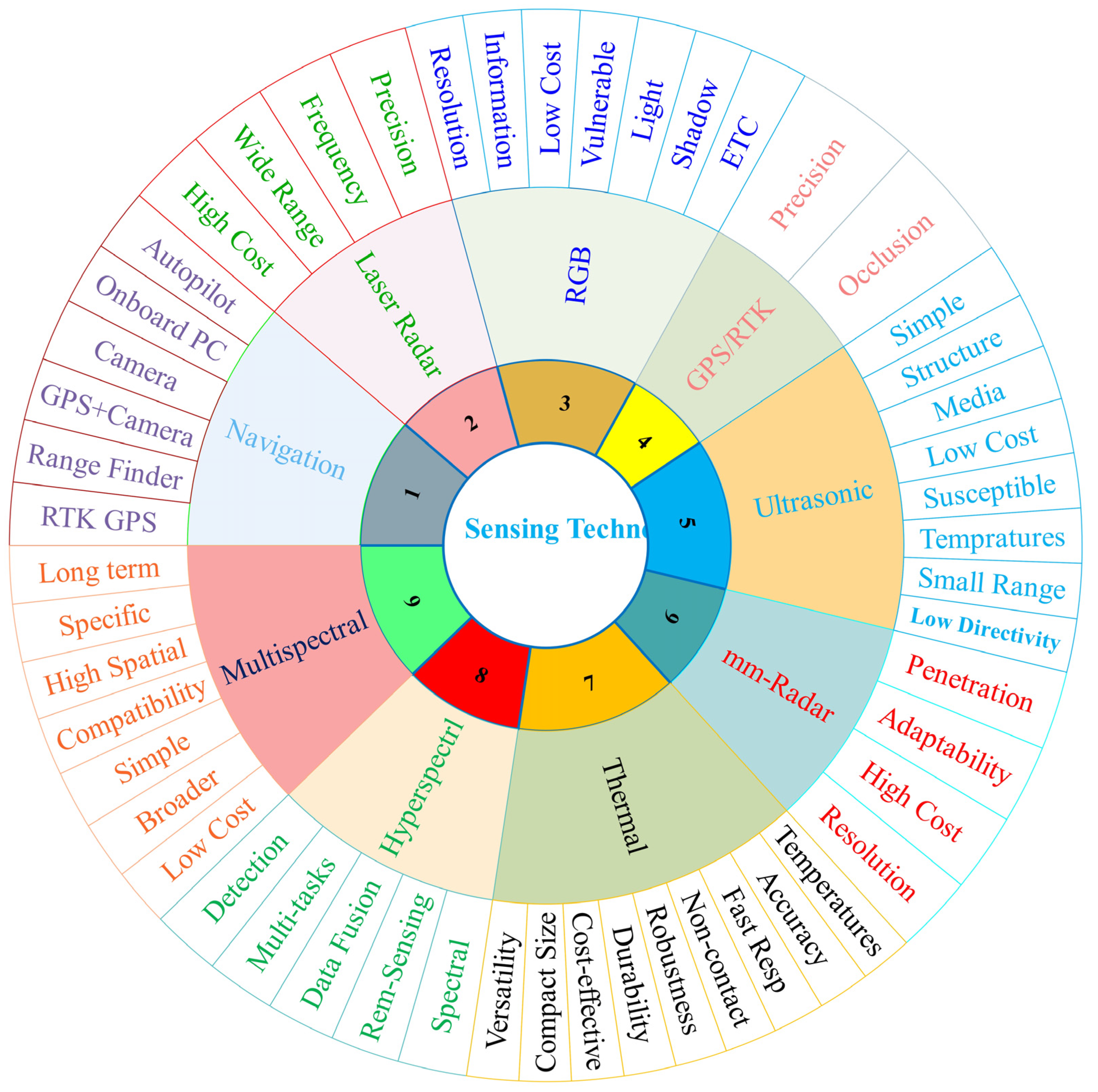
5.4. Integration of Sensor Technologies in UAV Operations
6. Software and Surveillance Systems
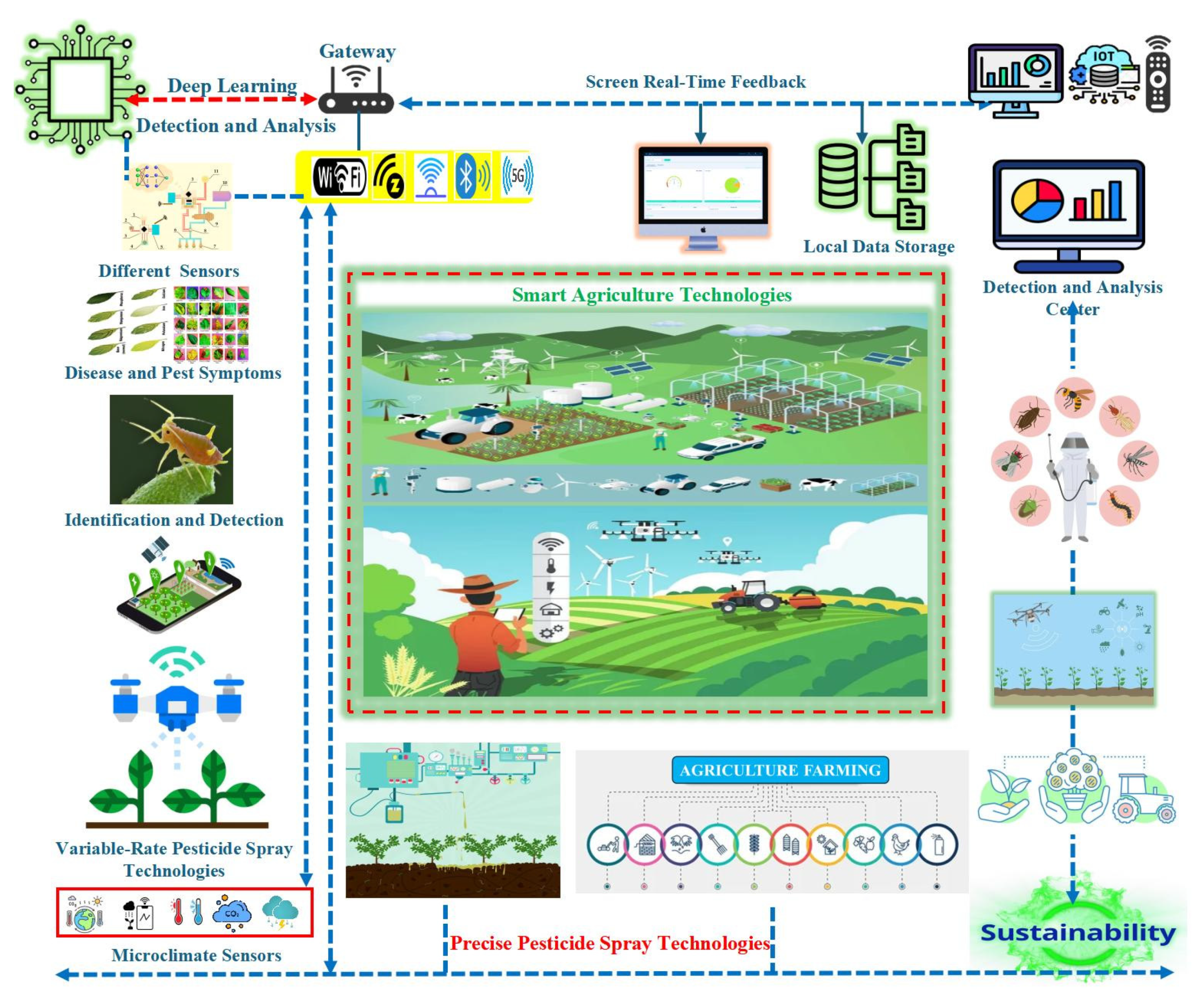
7. Artificial Intelligence (AI) and Internet of Things (IoT)
8. Technological Development and Limitations
8.1. Technical, Physical, and Environmental Limitations
8.2. Variable Rate Applications (VRAs) and Precision Detection in Modern Spraying Technology
8.3. UAV Flight Speeds, Altitudes, and Droplet Depositions
8.4. Autonomous Navigational Flights and Obstacle Avoidance Technologies
8.5. Droplet Spectrum and Distribution
8.6. Biodegradable Materials
8.7. Droplet Deposition Detection Technologies: Spectral Solutions
9. UAV Adoption and Complex Barriers
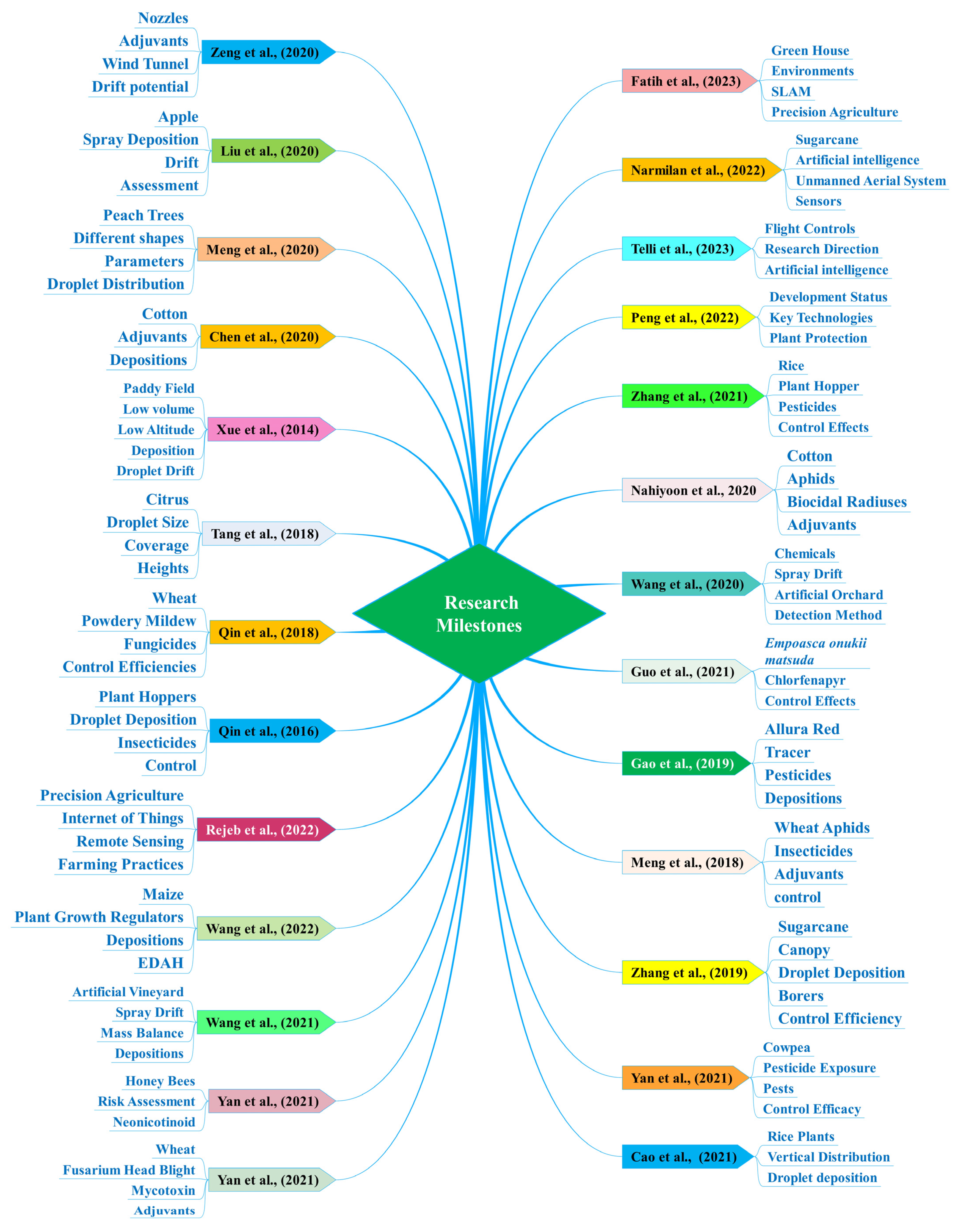
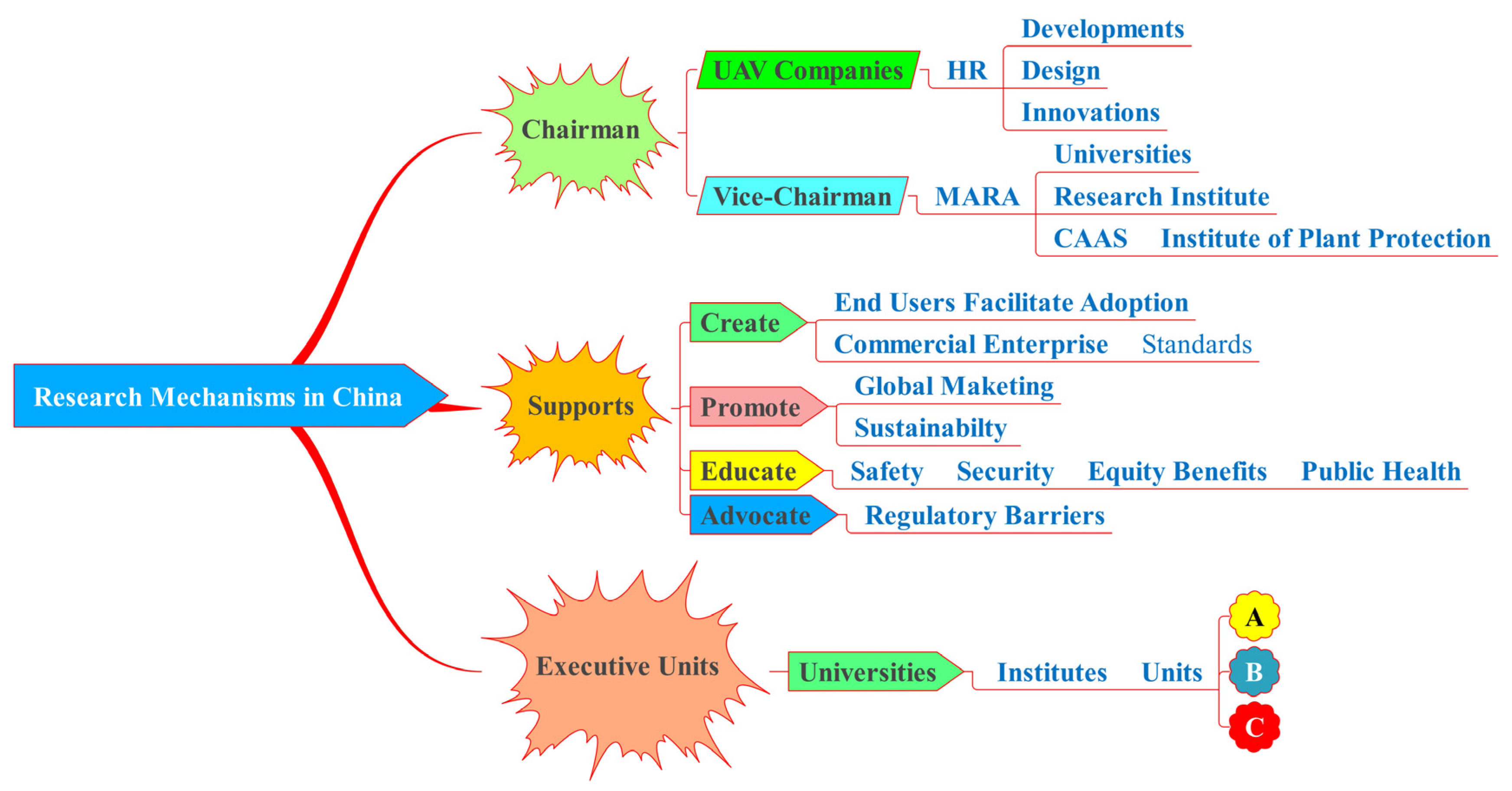
10. Research and Development Role in Plant Protection Paradigms
11. Transforming Plant Protection into an Economic Imperative
11.1. Sustainable Technologies for Pest and Disease Surveillance
11.2. Real-Time Prediction Systems
11.3. Farm and Field Surveillance Systems
11.4. Role of UAVs in Rescue Missions
11.5. Role of UAVs Releasing Natural Enemies and Pollinations
12. Future Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Wang, L.; Huang, X.; Li, W.; Yan, K.; Han, Y.; Zhang, Y.; Lan, Y. Progress in agricultural unmanned aerial vehicles (UAVs) applied in China and prospects for Poland. Agriculture 2022, 12, 397. [Google Scholar] [CrossRef]
- Tang, Q.; Chen, L.; Zhang, R.; Deng, W.; Xu, M.; Xu, G.; Hewitt, A. Effects of application height and crosswind on the crop spraying performance of unmanned helicopters. Comput. Electron. Agric. 2021, 181, 105961. [Google Scholar] [CrossRef]
- Haque, A.; Islam, N.; Samrat, N.H.; Dey, S.; Ray, B. Smart farming through responsible leadership in Bangladesh: Possibilities, opportunities, and beyond. Sustainability 2021, 13, 4511. [Google Scholar] [CrossRef]
- Seo, Y.; Umeda, S. Evaluating farm management performance by the choice of pest-control sprayers in rice farming in Japan. Sustainability 2021, 13, 2618. [Google Scholar] [CrossRef]
- Khanna, A.; Kaur, S. Evolution of Internet of Things (IoT) and its significant impact in the field of Precision Agriculture. Comput. Electron. Agric. 2019, 157, 231. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, Y.; He, G.; Wang, C.; Yuan, J.; Cao, X. Spatial variability of sustainable development goals in China: A provincial level evaluation. Environ. Dev. 2020, 35, 100483. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S.; Deng, J.; Zhou, Z.; Ouyang, F. Development situation and problem analysis of plant protection unmanned aerial vehicle in China. J. South China Agric. Univ. 2019, 40, 225. [Google Scholar]
- Quan, X.; Guo, Q.; Ma, J.; Doluschitz, R. The economic effects of unmanned aerial vehicles in pesticide application: Evidence from Chinese grain farmers. Precis. Agric. 2023, 24, 1965–1981. [Google Scholar] [CrossRef]
- Zheng, S.; Wang, Z.; Wachenheim, C.J. Technology adoption among farmers in Jilin Province, China: The case of aerial pesticide application. China Agric. Econ. Rev. 2019, 11, 216. [Google Scholar] [CrossRef]
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A light-weight multispectral sensor for micro-UAV—Opportunities for very high resolution airborne remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2008, 37, 1200. [Google Scholar]
- Hafeez, A.; Husain, M.A.; Singh, S.P.; Chauhan, A.; Khan, M.T.; Kumar, N.; Soni, S.K. Implementation of drone technology for farm monitoring & pesticide spraying: A review. Inf. Process. Agric. 2022, 10, 192–203. [Google Scholar]
- Ahale, S.; Rakhonde, G.; Bhateja, S.; Kuppuraj, J.; Mishra, S. Disease and Pest Control through Advance Technology. In Artificial Intelligence and Smart Agriculture: Technology and Applications; Springer Nature Singapore: Singapore, 2024; pp. 437–459. [Google Scholar]
- Etezadi, H.; Eshkabilov, S. A Comprehensive Overview of Control Algorithms, Sensors, Actuators, and Communication Tools of Autonomous All-Terrain Vehicles in Agriculture. Agriculture 2024, 2, 163. [Google Scholar] [CrossRef]
- Adetunji, C.O.; Olaniyan, O.T.; Anani, O.A.; Inobeme, A.; Osemwegie, O.O.; Hefft, D.; Akinbo, O. Artificial Intelligence and Automation for Precision Pest Management. In Sensing and Artificial Intelligence Solutions for Food Manufacturing; CRC Press: Boca Raton, FL, USA, 2023; pp. 49–70. [Google Scholar]
- He, L. Variable rate technologies for precision agriculture. In Encyclopedia of Digital Agricultural Technologies; Springer International Publishing: Cham, Switzerland, 2023; pp. 1533–1542. [Google Scholar]
- Khan, N.; Ray, R.L.; Kassem, H.S.; Hussain, S.; Zhang, S.; Khayyam, M.; Ihtisham, M.; Asongu, S.A. Potential role of technology innovation in transformation of sustainable food systems: A review. Agriculture 2021, 11, 984. [Google Scholar] [CrossRef]
- Khan, N.; Ray, R.L.; Sargani, G.R.; Ihtisham, M.; Khayyam, M.; Ismail, S. Current progress, and future prospects of agriculture technology: Gateway to sustainable agriculture. Sustainability 2021, 13, 4883. [Google Scholar] [CrossRef]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Swain, K.C.; Thomson, S.J.; Jayasuriya, H.P. Adoption of an unmanned helicopter for low-altitude remote sensing to estimate yield and total biomass of a rice crop. Trans. ASABE 2010, 53, 27. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 136. [Google Scholar] [CrossRef]
- Xiongkui, H.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of an unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 30. [Google Scholar]
- Yue, J.; Lei, T.; Li, C.; Zhu, J. The application of unmanned aerial vehicle remote sensing in quickly monitoring crop pests. Intell. Autom. Soft Comput. 2012, 18, 1052. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y.; Zhang, Z.; Han, L.; Li, Y.; Zhang, H.; He, X. Spray performance evaluation of a six-rotor unmanned aerial vehicle sprayer for pesticide application using an orchard operation mode in apple orchards. Pest Manag. Sci. 2022, 78, 2466. [Google Scholar] [CrossRef]
- Raeva, P.L.; Šedina, J.; Dlesk, A. Monitoring of crop fields using multispectral and thermal imagery from UAV. Eur. J. Remote Sens. 2019, 52, 201. [Google Scholar] [CrossRef]
- Hu, P.; Zhang, R.; Yang, J.; Chen, L. Development Status and Key Technologies of Plant Protection UAVs in China: A Review. Drones 2022, 6, 354. [Google Scholar] [CrossRef]
- Ahmad, A.; Ordoñez, J.; Cartujo, P.; Martos, V. Remotely Piloted Aircraft (RPA) in Agriculture: A Pursuit of Sustainability. Agronomy 2021, 11, 7. [Google Scholar] [CrossRef]
- Park, S.; Lee, H.; Chon, J. Sustainable monitoring coverage of unmanned aerial vehicle photogrammetry according to wing type and image resolution. Environ. Pollut. 2019, 247, 348. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Guan, S.; Zhu, Z.; Wang, G. A review on UAV-based remote sensing technologies for construction and civil applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Wang, L.; Chen, S.; Li, D.; Wang, C.; Jiang, H.; Zheng, Q.; Peng, Z. Estimation of paddy rice nitrogen content and accumulation both at leaf and plant levels from UAV hyperspectral imagery. Remote Sens. 2021, 13, 2956. [Google Scholar] [CrossRef]
- Wang, C.; Herbst, A.; Zeng, A.; Wongsuk, S.; Qiao, B.; Qi, P.; He, X. Assessment of spray deposition, drift and mass balance from unmanned aerial vehicle sprayer using an artificial vineyard. Sci. Total Environ. 2021, 777, 146181. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on UAVs. arXiv 2023, arXiv:2307.13691. [Google Scholar]
- Zhou, H.; Fu, L.; Sharma, R.P.; Lei, Y.; Guo, J. A hybrid approach of combining random forest with texture analysis and VDVI for desert vegetation mapping Based on UAV RGB Data. Remote Sens. 2021, 13, 1891. [Google Scholar] [CrossRef]
- Tang, Y.; Dananjayan, S.; Hou, C.; Guo, Q.; Luo, S.; He, Y. A survey on the 5G network and its impact on agriculture: Challenges and opportunities. Comput. Electron. Agric. 2021, 180, 105895. [Google Scholar] [CrossRef]
- Song, X.P.; Liang, Y.J.; Zhang, X.Q.; Qin, Z.Q.; Wei, J.J.; Li, Y.R.; Wu, J.M. Intrusion of fall armyworm (Spodoptera frugiperda) in sugarcane and its control by drone in China. Sugar Tech. 2020, 22, 737. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, D.; Wang, H.; Wang, X.; Yu, G.; Zhao, X. An evaluation of China’s agricultural green production: 1978–2017. J. Clean. Prod. 2020, 243, 118483. [Google Scholar] [CrossRef]
- Psirofonia, P.; Samaritakis, V.; Eliopoulos, P.; Potamitis, I. Use of unmanned aerial vehicles for agricultural applications with emphasis on crop protection: Three novel case-studies. Int. J. Agric. Sci. Technol. 2017, 5, 39. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105115. [Google Scholar] [CrossRef]
- Brewster, C.; Roussaki, I.; Kalatzis, N.; Doolin, K.; Ellis, K. IoT in agriculture: Designing a Europe-wide large-scale pilot. IEEE Commun. Mag. 2017, 55, 33. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Li, X.; Andaloro, J.; Chen, P.; Hoffmann, W.C.; Lan, Y. Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer. Sci. Total Environ. 2020, 737, 139793. [Google Scholar] [CrossRef]
- Zhou, Z.; Ming, R.; Zang, Y.; He, X.; Luo, X.; Lan, Y. Development status and countermeasures of agricultural aviation in China. Trans. Chin. Soc. Agric. Eng. 2017, 33, 13. [Google Scholar]
- Patel, P.N.; Patel, M.A.; Faldu, R.M.; Dave, Y.R. Quadcopter for agricultural surveillance. Adv. Electron. Electr. Eng. 2013, 3, 427–432. [Google Scholar]
- WU, Q.; ZENG, J.; WU, K. Research and application of crop pest monitoring and early warning technology in China. Front. Agric. Sci. Eng. 2022, 9, 36. [Google Scholar] [CrossRef]
- Feng, X.; Yan, F.; Liu, X. Study of wireless communication technologies on Internet of Things for precision agriculture. Wirel. Pers. Commun. 2019, 108, 1802. [Google Scholar] [CrossRef]
- Yu, J.; Wu, J. The sustainability of agricultural development in China: The agriculture–environment nexus. Sustainability 2018, 10, 1776. [Google Scholar] [CrossRef]
- Shao, L.; Gong, J.; Fan, W.; Zhang, Z.; Zhang, M. Cost comparison between digital management and traditional management of cotton fields—Evidence from cotton fields in Xinjiang, China. Agriculture 2022, 8, 1105. [Google Scholar] [CrossRef]
- Dai, X.; Chen, Y.; Zhang, C.; He, Y.; Li, J. Technological revolution in the field: Green development of Chinese agriculture driven by digital information technology (DIT). Agriculture 2023, 13, 199. [Google Scholar] [CrossRef]
- The State Council of the People’s Republic of China. Available online: http://www.gov.cn/zhuanti/2017-10/27/content_5234876.htm (accessed on 27 October 2017).
- Ghose, B. Food security and food self-sufficiency in China: From past to 2050. Food Energy Secur. 2014, 3, 95. [Google Scholar] [CrossRef]
- Tong, R.; Wang, Y.; Zhu, Y.; Wang, Y. Does the certification of agriculture products promote the adoption of integrated pest management among apple growers in China. Environ. Sci. Pollut. Res. 2022, 29, 29808–29817. [Google Scholar] [CrossRef] [PubMed]
- Veeck, G.; Veeck, A.; Yu, H. Challenges of agriculture and food systems issues in China and the United States. Geogr. Sustain. 2020, 1, 117. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y.; Elahi, E.; Wang, Y. Comprehensive evaluation of agricultural modernization levels. Sustainability 2022, 14, 5069. [Google Scholar] [CrossRef]
- Hedley, C. The role of precision agriculture for improved nutrient management on farms. J. Sci. Food Agric. 2015, 95, 19. [Google Scholar] [CrossRef]
- Ye, W.; Lao, J.; Liu, Y.; Chang, C.C.; Zhang, Z.; Li, H.; Zhou, H. Pine pest detection using remote sensing satellite images combined with a multi-scale attention-UNet model. Ecol. Inform. 2022, 72, 101906. [Google Scholar] [CrossRef]
- Zhan, Y.; Chen, S.; Wang, G.; Fu, J.; Lan, Y. Biological control technology and application based on agricultural unmanned aerial vehicle (UAV) intelligent delivery of insect natural enemies (Trichogramma) carrier. Pest Manag. Sci. 2021, 77, 3272. [Google Scholar] [CrossRef] [PubMed]
- Hazra, D.K.; Karmakar, R.; Poi, R.; Bhattacharya, S.; Mondal, S. Recent advances in pesticide formulations for eco-friendly and sustainable vegetable pest management: A review. Arch. Agric. Environ. Sci. 2021, 2, 237. [Google Scholar]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 223. [Google Scholar] [CrossRef]
- Yang, S.; Xu, P.; Jiang, S.; Zheng, Y. Downwash characteristics and analysis from a six-rotor unmanned aerial vehicle configured for plant protection. Pest Manag. Sci. 2022, 78, 1720. [Google Scholar] [CrossRef]
- Liu, Y.; Ru, Y.; Duan, L.; Qu, R. Model and design of real-time control system for aerial variable spray. PLoS ONE 2020, 15, e0235700. [Google Scholar] [CrossRef]
- Chan, K.W. A China paradox: Migrant labor shortage amidst rural labor supply abundance. Eurasian Geogr. Econ. 2010, 51, 530. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef]
- Cui, L.; Wang, G.; Yang, D.; Nahiyoon, S.A.; Yan, X.; Yuan, H. Biocidal radiuses of abamectin, thiamethoxam and sulfoxaflor droplets controlling against wheat aphid (Sitobion avenae). PLoS ONE 2018, 13, e0205598. [Google Scholar] [CrossRef]
- Zhang, D.; Lan, Y.B.; Chen, L.; Wang, X.; Liang, D. Current status and future trends of agricultural aerial spraying technology in China. Nongye Jixie Xuebao=Trans. Chin. Soc. Agric. Mach. 2014, 45, 59. [Google Scholar]
- Wang, Z.; Hussain, M.; Yin, J.; Yuan, M.; Mo, Y.; Quan, M.; Tan, W. Analysis of droplet deposition and maize (Zea mays L.) growth control: Application of ethephon by small unmanned aerial vehicle and electric knapsack sprayer. Field Crops Res. 2023, 292, 108822. [Google Scholar] [CrossRef]
- Yu, K.; Liu, Y.; Gong, Z.; Liang, Y.; Du, L.; Zhang, Z.; Li, Z. Chemical topping improves the efficiency of spraying harvest aids using unmanned aerial vehicles in high-density cotton. Field Crops Res. 2022, 283, 108546. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of unmanned aerial vehicle flight height on droplet distribution, drift and control of cotton aphids and spider mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef]
- Lin, Y.C.; Habib, A. Quality control and crop characterization framework for multi-temporal UAV LiDAR data over mechanized agricultural fields. Remote Sens. Environ. 2021, 256, 112299. [Google Scholar] [CrossRef]
- Qin, W.C.; Qiu, B.J.; Xue, X.Y.; Chen, C.; Xu, Z.F.; Zhou, Q.Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 88. [Google Scholar] [CrossRef]
- Zhou, X.; Kono, Y.; Win, A.; Matsui, T.; Tanaka, T.S. Predicting within-field variability in grain yield and protein content of winter wheat using UAV-based multispectral imagery and machine learning approaches. Plant Prod. Sci. 2021, 24, 151. [Google Scholar] [CrossRef]
- Meng, Y.; Lan, Y.; Mei, G.; Guo, Y.; Song, J.; Wang, Z. Effect of aerial spray adjuvant applying on the efficiency of small unmanned aerial vehicle for wheat aphid’s control. Int. J. Agric. Biol. Eng. 2018, 11, 53. [Google Scholar]
- Qin, W.; Xue, X.; Zhou, L.; Zhang, S.; Sun, Z.; Kong, W.; Wang, B. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies. Trans. Chin. Soc. Agric. Eng. 2014, 30, 56. [Google Scholar]
- Barbedo, J.G.A. A review on the use of unmanned aerial vehicles and imaging sensors for monitoring and assessing plant stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef]
- Xue, X.; Qin, W.; Sun, Z.; Zhang, S.; Zhou, L.; Wu, P. Effects of N-3 UAV spraying methods on the efficiency of insecticides against planthoppers and Cnaphalocrocis medinalis. Acta Phytophylacica Sin. 2013, 40, 278. [Google Scholar]
- Xie, C.; Yang, C. A review on plant high-throughput phenotyping traits using UAV-based sensors. Comput. Electron. Agric. 2020, 178, 105731. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, D.; Luo, J.; Wang, D.; Huang, W. Identifying leaf-scale wheat aphids using the near-ground hyperspectral push-broom imaging spectrometer. In Computer and Computing Technologies in Agriculture V: 5th IFIP TC 5/SIG 5.1 Conference, CCTA 2011, Beijing, China, 29–31 October 2011; Proceedings, Part II 5; Springer: Berlin/Heidelberg, Germany, 2012; pp. 275–282. [Google Scholar]
- Zhang, J.; Liu, Y.; Gao, J.; Yuan, C.; Zhan, X.; Cui, X.; Xu, M. Current Epidemic Situation and Control Status of Citrus Huanglongbing in Guangdong China: The Space–Time Pattern Analysis of Specific Orchards. Life 2023, 13, 749. [Google Scholar] [CrossRef] [PubMed]
- Popescu, D.; Ichim, L.; Stoican, F. Orchard monitoring based on unmanned aerial vehicles and image processing by artificial neural networks: A systematic review. Front. Plant Sci. 2023, 14, 1237695. [Google Scholar] [CrossRef] [PubMed]
- Lan, Y.B.; Zhu, Z.H.; Deng, X.L.; Lian, B.Z.; Huang, J.Y.; Huang, Z.X.; Hu, J. Monitoring and classification of citrus Huanglongbing based on UAV hyperspectral remote sensing. Trans. CSAE 2019, 35, 100. [Google Scholar]
- Meng, Y.; Zhong, W.; Liu, C.; Su, J.; Su, J.; Lan, Y.; Wang, M. UAV spraying on citrus crop: Impact of tank-mix adjuvant on the contact angle and droplet distribution. PeerJ 2022, 10, e13064. [Google Scholar] [CrossRef] [PubMed]
- Pan, Z.; Lie, D.; Qiang, L.; Shaolan, H.; Shilai, Y.; Yande, L.; Haiyang, P. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 52. [Google Scholar]
- Yongjun, Z.; Shenghui, Y.; Chunjiang, Z.; Liping, C.; Lan, Y.; Yu, T. Modelling operation parameters of UAV on spray effects at different growth stages of corn. Int. J. Agric. Biol. Eng. 2017, 10, 57–66. [Google Scholar]
- Wang, M.; Su, X.J.; Zhou, X.X.; Yue, H.F.; Chen, Y.X.; Yan, X.J.; Yuan, H.Z. Study on pesticide utilization rate and aphid control effect of spraying on apple orchard under different cultivation modes. In Proceedings of the 2018 Annual Academic Conference of Chinese Plant Protection Society, Xi’an, China, October 2018; p. 302. [Google Scholar]
- Xu, B.; Meng, R.; Chen, G.; Liang, L.; Lv, Z.; Zhou, L.; Yang, W. Improved weed mapping in corn fields by combining UAV-based spectral, textural, structural, and thermal measurements. Pest Manag. Sci. 2023, 79, 2602. [Google Scholar] [CrossRef]
- Li, Y.R.; Yang, L.T. Sugarcane agriculture and sugar industry in China. Sugar Tech. 2015, 17, 8. [Google Scholar] [CrossRef]
- Qiao, C. Optimization and Effect Analysis of Spraying Technology of UAV in Apple Orchard. Master’s Thesis, Northwest A&F University, Xianyang, China, 2019; 45p. [Google Scholar]
- Bian, Y.L.; Li, J.P.; Xue, C.L.; Li, X.H.; Wang, P.F. A comparative study on the performance of single-rotor oil-propelled UAV and circular air-fed orchard sprayer. J. China Agric. Univ. 2020, 25, 141. [Google Scholar]
- Zhang, X.Q.; Liang, Y.J.; Qin, Z.Q.; Li, D.W.; Wei, C.Y.; Wei, J.J.; Song, X.P. Application of multi-rotor unmanned aerial vehicle application in the management of stem borer (Lepidoptera) in sugarcane. Sugar Tech. 2019, 21, 852. [Google Scholar] [CrossRef]
- Amarasingam, N.; Salgadoe, A.S.A.; Powell, K.; Gonzalez, L.F.; Natarajan, S.A. review of UAV platforms, sensors, and applications for monitoring of sugarcane crops. Remote Sensing Applications: Soc. Environ. 2022, 26, 100712. [Google Scholar] [CrossRef]
- Pan, F.R.; Zheng, W. Development process, existing problems and development suggestions of sweet cherry facility cultivation in China. Deciduous Fruits 2019, 51, 4. [Google Scholar]
- Zhou, J.; Khot, L.R.; Peters, T.; Whiting, M.D.; Zhang, Q.; Granatstein, D. Efficacy of unmanned helicopter in rainwater removal from cherry canopies. Comput. Electron. Agric. 2019, 124, 167. [Google Scholar] [CrossRef]
- Geng, J.; Liang, C. Analysis of the Internal Relationship between Ecological Value and Economic Value Based on the Forest Resources in China. Sustainability 2021, 13, 6795. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Y.; Zhou, C.; Yin, L.; Feng, X. Urban Forest monitoring based on multiple features at the single tree scale by UAV. Urban For. Urban Green. 2021, 58, 126958. [Google Scholar] [CrossRef]
- Guo, Q.; Su, Y.; Hu, T.; Zhao, X.; Wu, F.; Li, Y.; Wang, X. An integrated UAV-borne lidar system for 3D habitat mapping in three forest ecosystems across China. Int. J. Remote Sens. 2017, 38, 2972. [Google Scholar] [CrossRef]
- Abdullah, H.S.; Mahieddine, F.; Sheriff, R.E. Technology impact on agricultural productivity: A review of precision agriculture using unmanned aerial vehicles. In International Conference on Wireless and Satellite Systems; Springer: Cham, Switzerland, 2015; pp. 388–400. [Google Scholar]
- Hong, J.; Lan, Y.; Yue, X.; Cen, Z.; Wang, L.; Peng, W.; Lu, Y. Adaptive target spray system based on machine vision for plant protection UAV. Int. J. Precis. Agric. Aviat. 2020, 3, 65–71. [Google Scholar] [CrossRef]
- Yu, F.H.; Cao, Y.L.; Xu, T.Y.; Guo, Z.H.; Wang, D.K. Precision fertilization by UAV for rice at tillering stage in cold region based on hyperspectral remote sensing prescription map. Trans. CSAE 2020, 36, 110. [Google Scholar]
- Ampatzidis, Y.; Partel, V.; Costa, L. Agroview: Cloud-based application to process, analyze and visualize UAV-collected data for precision agriculture applications utilizing artificial intelligence. Comput. Electron. Agric. 2020, 174, 105457. [Google Scholar] [CrossRef]
- Iost Filho, F.H.; Heldens, W.B.; Kong, Z.; de Lange, E.S. Drones: Innovative technology for use in precision pest management. J. Econ. Entomol. 2020, 113, 25. [Google Scholar] [CrossRef]
- Tang, Y.; Hou, C.J.; Luo, S.M.; Lin, J.T.; Yang, Z.; Huang, W.F. Effects of operation height and tree shape on droplet deposition in citrus trees using an unmanned aerial vehicle. Comput. Electron. Agric. 2018, 148, 7. [Google Scholar] [CrossRef]
- Giles, D.; Billing, R. Deployment and performance of a UAV for crop spraying. Chem. Eng. Trans. 2015, 44, 307–312. [Google Scholar]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2018, 19, 292. [Google Scholar] [CrossRef]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone technology: Types, payloads, applications, frequency spectrum issues and future developments. Future Drone Use Oppor. Threat. Ethical Leg. Perspect. 2016, 2, 45. [Google Scholar]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2023, 6, 147. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Roberts, P.; Kakarla, S.C. Detecting powdery mildew disease in squash at different stages using UAV-based hyperspectral imaging and artificial intelligence. Biosyst. Eng. 2020, 197, 148. [Google Scholar] [CrossRef]
- Ebeid, E.; Skriver, M.; Jin, J. A survey on open-source flight control platforms of unmanned aerial vehicles. In Proceedings of the 2017 Euromicro Conference on Digital System Design (DSD), Vienna, Austria, 30 August–1 September 2017; p. 402. [Google Scholar]
- Nansen, C. The potential and prospects of proximal remote sensing of arthropod pests. Pest Manag. Sci. 2016, 72, 4659. [Google Scholar] [CrossRef]
- Nansen, C.; Elliott, N. Remote sensing, and reflectance profiling in entomology. Annu. Rev. Entomol. 2016, 61, 139–158. [Google Scholar] [CrossRef] [PubMed]
- Zhao, T.; Stark, B.; Chen, Y.; Ray, A.L.; Doll, D. Challenges in water stress quantification using small unmanned aerial system (sUAS): Lessons from a growing season of almond. J. Intell. Robot Syst. 2017, 88, 735. [Google Scholar] [CrossRef]
- Nutter, J.F.W.; Tylka, G.L.; Guan, J.; Moreira, A.J.D.; Marett, C.C.; Rosburg, T.R.; Chong, C.S. Use of remote sensing to detect soybean cyst nematode-induced plant stress. J. Nematol. 2002, 34, 222. [Google Scholar]
- Peña, J.M.; Torres, S.J.; Serrano-Pérez, A.; De Castro, A.I.; López-Granados, F. Quantifying efficacy and limits of unmanned aerial vehicle (UAV) technology for weed seedling detection as affected by sensor resolution. Sensors 2015, 15, 5609–5626. [Google Scholar] [CrossRef] [PubMed]
- Calderón, R.; Navas-Cortés, J.A.; Lucena, C.; Zarco-Tejada, P.J. High-resolution airborne hyperspectral and thermal imagery for early detection of Verticillium wilt of olive using fluorescence, temperature, and narrow-band spectral indices. Remote Sens. Environ. 2013, 139, 245. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2022, 16, 137. [Google Scholar]
- Chen, Y.; Pi, D.; Xu, Y. Neighborhood global learning-based flower pollination algorithm and its application to unmanned aerial vehicle path planning. Expert Syst. Appl. 2021, 170, 114505. [Google Scholar] [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; Partel, V. UAV-based high throughput phenotyping in citrus utilizing multispectral imaging and artificial intelligence. Remote Sens. 2019, 11, 410. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Pessin, G.; Geraldo Filho, P.R.; Carvalho, A.C.; Furquim, G.; Ueyama, J. Fine-tuning of UAV control rules for spraying pesticides on crop fields. In Proceedings of the 2014 IEEE 26th International Conference on Tools with Artificial Intelligence, Limassol, Cyprus, 10–12 November 2014; p. 533. [Google Scholar]
- Ferguson, J.C.; Chechetto, R.G.; Hewitt, A.J.; Chauhan, B.S.; Adkins, S.W.; Kruger, G.R.; ’Donnell, C.C. Assessing the deposition and canopy penetration of nozzles with different spray qualities in an oat (Avena sativa L.) canopy. Crop Prot. 2016, 81, 19. [Google Scholar] [CrossRef]
- Stumph, B.; Virto, M.H.; Medeiros, H.; Tabb, A.; Wolford, S.; Rice, K.; Leskey, T. Detecting invasive insects with unmanned aerial vehicles. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 648–654. [Google Scholar]
- Jorge, J.; Vallbé, M.; Soler, J.A. Detection of irrigation inhomogeneities in an olive grove using the NDRE vegetation index obtained from UAV images. Eur. J. Remote Sens. 2019, 52, 177. [Google Scholar] [CrossRef]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Goebel, K. Battery health management system for electric UAVs. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011. [Google Scholar]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A novel methodology for improving plant pest surveillance in vineyards and crops using UAV-based hyperspectral and spatial data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef]
- Hilz, E.; Vermeer, A.W. Spray drift review: The extent to which a formulation can contribute to spray drift reduction. Crop Prot. 2013, 44, 83. [Google Scholar] [CrossRef]
- Reichard, D.L.; Zhu, H.; Fox, R.D.; Brazee, R.D. Computer simulation of variables that influence spray drift. Trans. ASAE 1992, 35, 1407. [Google Scholar] [CrossRef]
- İtmeç, M.; Bayat, A.; Bolat, A.; Toraman, M.C.; Soysal, A. Assessment of Spray Drift with Various Adjuvants in a Wind Tunnel. Agronomy 2022, 12, 2377. [Google Scholar] [CrossRef]
- Patel, M.K. Technological improvements in electrostatic spraying and its impact to agriculture during the last decade and future research perspectives A review. Eng. Agric. Environ. Food 2016, 9, 92–100. [Google Scholar] [CrossRef]
- Qi, H.; Lin, Z.; Zhou, J.; Li, J.; Chen, P.; Ouyang, F. Effect of temperature and humidity on droplet deposition of unmanned agricultural aircraft system. Int. J. Precis. Agric. Aviat. 2020, 3, 3. [Google Scholar] [CrossRef]
- Franz, E.; Bouse, L.F.; Carlton, J.B.; Kirk, I.W.; Latheef, M.A. Aerial spray deposit relations with plant canopy and weather parameters. Trans. ASAE 1998, 41, 966. [Google Scholar] [CrossRef]
- Nuyttens, D.; De Schampheleire, M.; Verboven, P.; Sonck, B. Comparison between indirect and direct spray drift assessment methods. Biosyst. Eng. 2010, 105, 12. [Google Scholar] [CrossRef]
- Tian, Z.; Xue, X.; Cui, L.; Chen, C.; Peng, B. Droplet deposition characteristics of plant protection UAV spraying at night. Int. J. Precis. Agric. Aviat. 2020, 3, 18–23. [Google Scholar] [CrossRef]
- Bourodimos, G.; Koutsiaras, M.; Psiroukis, V.; Balafoutis, A.; Fountas, S. Development and field evaluation of a spray drift risk assessment tool for vineyard spraying application. Agriculture 2019, 9, 181. [Google Scholar] [CrossRef]
- Campos, J.; García-Ruíz, F.; Gil, E. Assessment of vineyard canopy characteristics from vigour maps obtained using UAV and satellite imagery. Sensors 2021, 21, 2363. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Qi, H.; Chen, P.; Hewitt, A.; Han, Y. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag. Sci. 2019, 75, 1555. [Google Scholar] [CrossRef]
- Ferguson, J.C.; Hewitt, A.J.; ’Donnell, C.C. Pressure, droplet size classification, and nozzle arrangement effects on coverage and droplet number density using air-inclusion dual fan nozzles for pesticide applications. Crop Prot. 2016, 89, 238. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, S.; Wang, G.; Lan, Y. Drift evaluation of a quadrotor unmanned aerial vehicle (uav) sprayer: Effect of liquid pressure and wind speed on drift potential based on wind tunnel test. Appl. Sci. 2021, 6, 7258. [Google Scholar] [CrossRef]
- Cen, Z.; Yue, X.; Wang, L.; Ling, K.; Cheng, Z.; Lu, Y. Design and test of self-adaptive variable spray system of UAV based on neural network PID. J. South China Agric. Univ. 2019, 40, 108. [Google Scholar]
- Chen, S.; Lan, Y.; Zhou, Z.; Deng, X.; Wang, J. Research advances of the drift reducing technologies in application of agricultural aviation spraying. Int. J. Agric. Biol. Eng. 2021, 14, 10. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Iqbal, J.; Wasim, A. Real-time recognition of spraying area for UAV sprayers using a deep learning approach. PLoS ONE 2021, 16, e0249436. [Google Scholar] [CrossRef]
- Hunter III, J.E.; Gannon, T.W.; Richardson, R.J.; Yelverton, F.H.; Leon, R.G. Integration of remote-weed mapping and an autonomous spraying unmanned aerial vehicle for site-specific weed management. Pest Manag. Sci. 2020, 76, 1392. [Google Scholar] [CrossRef]
- Zhu, H.; Lan, Y.; Wu, W.; Hoffmann, W.C.; Huang, Y.; Xue, X.; Fritz, B. Development of a PWM precision spraying controller for unmanned aerial vehicles. J. Bionic Eng. 2010, 7, 283. [Google Scholar] [CrossRef]
- Faiçal, B.S.; Costa, F.G.; Pessin, G.; Ueyama, J.; Freitas, H.; Colombo, A.; Braun, T. The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. J. Syst. Archit. 2014, 60, 404. [Google Scholar] [CrossRef]
- Ivić, S.; Andrejčuk, A.; Družeta, S. Autonomous control for multi-agent non-uniform spraying. Appl. Soft Comput. 2019, 80, 760. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray, and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 243. [Google Scholar] [CrossRef]
- Basso, M.; Stocchero, D.; Ventura, B.H.R.; Vian, A.L.; Bredemeier, C.; Konzen, A.A.; Pignaton, D.F.E. Proposal for an embedded system architecture using a GNDVI algorithm to support UAV-based agrochemical spraying. Sensors 2019, 19, 5397. [Google Scholar] [CrossRef] [PubMed]
- Anifantis, A.S.; Camposeo, S.; Vivaldi, G.A.; Santoro, F.; Pascuzzi, S. Comparison of UAV photogrammetry and 3D modeling techniques with other currently used methods for estimation of the tree row volume of a super-high-density olive orchard. Agriculture 2019, 9, 233. [Google Scholar] [CrossRef]
- Zhang, W.; Jiang, F.; Ou, J. Global pesticide consumption and pollution: With China as a focus. Proc. Int. Acad. Ecol. Environ. Sci. 2011, 1, 125. [Google Scholar]
- Pan, B.; Jiang, L.; Wang, B.; Liang, J.; Zhu, H.; Bai, X. Effects of flight parameters of diesel six-rotor UAV on deposition distribution of fogdrops in litchi tree canopy. Chin. J. Trop. Crops 2021, 42, 213. [Google Scholar]
- Lou, S.Y.; Xue, X.Y.; Gu, W.; Cui, L.F.; Xiao, H.T.; Tian, Z.W. Current status and trends of agricultural plant protection unmanned aerial vehicle. J. Agric. Mech. Res. 2017, 39, 6. [Google Scholar]
- Wang, J.; Lan, Y.; Wen, S.; Hewitt, A.J.; Yao, W.; Chen, P. Meteorological and flight altitude effects on deposition, penetration, and drift in pineapple aerial spraying. Asia-Pac. J. Chem. Eng. 2020, 15, 2382. [Google Scholar] [CrossRef]
- Shengde, C.; Lan, Y.; Jiyu, L.; Zhiyan, Z.; Aimin, L.; Yuedong, M. Effect of wind field below unmanned helicopter on droplet deposition distribution of aerial spraying. Int. J. Agric. Biol. Eng. 2017, 10, 77. [Google Scholar]
- Hu, H.; Ren, X.; Ma, X.; Li, H.; Ma, Y.; Wang, D.; Ma, Y. Control effect on cotton aphids of insecticides sprayed with unmanned aerial vehicles under different flight heights and spray volumes. Int. J. Precis. Agric. Aviat. 2021, 4, 44–51. [Google Scholar] [CrossRef]
- Hunter, J.E.; Gannon, T.W.; Richardson, R.J.; Yelverton, F.H.; Leon, R.G. Coverage and drift potential associated with nozzle and speed selection for herbicide applications using an unmanned aerial sprayer. Weed Technol. 2020, 34, 240. [Google Scholar] [CrossRef]
- Zhou, L.P.; He, Y. Simulation and optimization of multi-spray factors in UAV. In 2016 ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2016; p. 1. [Google Scholar]
- Zhu, H.; Li, H.; Zhang, C.; Li, J.; Zhang, H. Performance characterization of the UAV chemical application based on CFD simulation. Agronomy 2019, 9, 308. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, L.; Cai, D.; Wu, J.; Ding, G.; Guan, X. Effects of flight altitude and speed of unmanned helicopter on spray deposition uniform. Trans. Chin. Soc. Agric. Eng. 2013, 29, 32. [Google Scholar]
- Al Heidary, M.; Douzals, J.P.; Sinfort, C.; Vallet, A. Influence of spray characteristics on potential spray drift of field crop sprayers: A literature review. Crop Prot. 2014, 63, 120–130. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Marucco, P.; González-Sánchez, E.J.; Gil, E.; Grella, M.; Balsari, P. Developing strategies to reduce spray drift in pneumatic spraying in vineyards: Assessment of the parameters affecting droplet size in pneumatic spraying. Sci. Total Environ. 2018, 616, 815. [Google Scholar] [CrossRef]
- Hu, J.; Wang, T.; Yang, J.; Lan, Y.; Lv, S.; Zhang, Y. WSN-assisted UAV trajectory adjustment for pesticide drift control. Sensors 2020, 20, 5473. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Lan, Y.; Zhou, Z.; Ouyang, F.; Wang, G.; Huang, X.; Cheng, S. Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV. Agronomy 2020, 10, 195. [Google Scholar] [CrossRef]
- Fengbo, Y.; Xinyu, X.; Ling, Z.; Zhu, S. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover. Int. J. Agric. Biol. Eng. 2017, 10, 53. [Google Scholar] [CrossRef]
- Wang, J.; Lan, Y.; Zhang, H.; Zhang, Y.; Wen, S.; Yao, W.; Deng, J. Drift and deposition of pesticide applied by UAV on pineapple plants under different meteorological conditions. Int. J. Agric. Biol. Eng. 2018, 11, 12. [Google Scholar] [CrossRef]
- Wu, Y.; Qi, L.; Cheng, Z.; Xiao, Y.; Yang, Z.; Liu, W.; Li, X. Testing method and anti-drift capability analysis of downwash airflow distribution characteristics of multi-rotor UAV in hover. In 2019 ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2019; p. 1. [Google Scholar]
- Cerruto, E.; Manetto, G.; Papa, R.; Longo, D. Modelling spray pressure effects on droplet size distribution from agricultural nozzles. Appl. Sci. 2021, 11, 9283. [Google Scholar] [CrossRef]
- Shilin, W.; Jianli, S.; Xiongkui, H.; Le, S.; Xiaonan, W.; Changling, W.; Yun, L. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 31. [Google Scholar] [CrossRef]
- Wen, S.; Lan, Y.; Zhang, J.; Li, S.; Zhang, H.; Xing, H. Analysis and experiment on atomization characteristics of ultra-low-volume swirl nozzle for agricultural unmanned aviation vehicle. Trans. Chin. Soc. Agric. Eng. 2016, 32, 85–93. [Google Scholar]
- Yao, W.; Guo, S.; Yu, F.; Du, W.; Meng, Y.; Wang, J.; Lan, Y. Droplet deposition and spatial drift distribution characteristics of aerial spraying based on the determination of effective swath. Int. J. Precis. Agric. Aviat. 2021, 4, 36–43. [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Pan, H.; He, Z. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2016, 32, 61. [Google Scholar] [CrossRef]
- Derksen, R.C.; Zhu, H.; Ozkan, H.E.; Hammond, R.B.; Dorrance, A.E.; Spongberg, A.L. Determining the influence of spray quality, nozzle type, spray volume, and air-assisted application strategies on deposition of pesticides in soybean canopy. Trans. ASABE 2008, 51, 1537. [Google Scholar] [CrossRef]
- Fritz, B.K.; Hoffmann, W.C.; Martin, D.E.; Thomson, S.J. Aerial application methods for increasing spray deposition on wheat heads. Appl. Eng. Agric. 2007, 23, 715. [Google Scholar] [CrossRef]
- Wang, C.; Zeng, A.; He, X.; Song, J.; Andreas, H.; Gao, W. Spray drift characteristics test of unmanned aerial vehicle spray unit under wind tunnel conditions. Int. J. Agric. Biol. Eng. 2022, 13, 21. [Google Scholar] [CrossRef]
- Yu, S.H.; Yun, Y.T.; Choi, Y.; Dafsari, R.A.; Lee, J. Effect of injection angle on drift potential reduction in pesticide injection nozzle spray applied in domestic Agricultural Drones. J. Biosyst. Eng. 2021, 46, 138. [Google Scholar] [CrossRef]
- Wang, L.; Lan, Y.; Yue, X.; Ling, K.; Cen, Z.; Cheng, Z.; Wang, J. Vision-based adaptive variable rate spraying approach for unmanned aerial vehicles. Int. J. Agric. Biol. Eng. 2019, 12, 26. [Google Scholar] [CrossRef]
- Wang, X.; He, X.; Song, J.; Wang, Z.; Wang, C.; Wang, S.; Meng, Y. Drift potential of UAV with adjuvants in aerial applications. Int. J. Agric. Biol. Eng. 2018, 11, 58. [Google Scholar] [CrossRef]
- Ru, Y.; Jin, L.; Zhou, H.; Jia, Z. Performance experiment of rotary hydraulic atomizing nozzle for aerial spraying application. Trans. Chin. Soc. Agric. Eng. 2014, 30, 55. [Google Scholar]
- Hillocks, R.J. Farming with fewer pesticides: EU pesticide review and resulting challenges for UK agriculture. Crop Prot. 2012, 31, 93. [Google Scholar] [CrossRef]
- Calore, R.A.; Ferreira, M.C.; Rodrigues, N.E.L.; Otuka, A.K. Effect of herbicides associated with adjuvants in surface tension and contact angle in leaves of Ipomoea hederifolia. Asp. Appl. Biol. 2014, 122, 30. [Google Scholar]
- Sarghini, F.; De Vivo, A. Analysis of preliminary design requirements of a heavy lift multirotor drone for agricultural use. Chem. Eng. Trans. 2017, 58, 630. [Google Scholar]
- Lan, Y.; Huang, Z.; Deng, X.; Zhu, Z.; Huang, H.; Zheng, Z.; Tong, Z. Comparison of machine learning methods for citrus greening detection on UAV multispectral images. Comput. Electron. Agric. 2020, 171, 105234. [Google Scholar] [CrossRef]
- Shi, Q.; Mao, H.; Guan, X. Numerical simulation and experimental verification of the deposition concentration of an unmanned aerial vevhicle. Appl. Eng. Agric. 2019, 35, 376. [Google Scholar] [CrossRef]
- Lv, M.; Xiao, S.; Yu, T.; He, Y. Influence of UAV flight speed on droplet deposition characteristics with the application of infrared thermal imaging. Int. J. Agric. Biol. Eng. 2019, 12, 17. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and experiment of a variable spray system for unmanned aerial vehicles based on PID and PWM control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef]
- Gonzalez-de-Soto, M.; Emmi, L.; Perez-Ruiz, M.; Aguera, J.; Gonzalez-de-Santos, P. Autonomous systems for precise spraying–Evaluation of a robotised patch sprayer. Biosyst. Eng. 2016, 146, 182. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A comprehensive survey of the recent studies with UAV for precision agriculture in open fields and greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Muhmad Kamarulzaman, A.M.; Wan Mohd, J.W.S.; Mohd, S.M.N.; Saad, S.N.M.; Mohan, M. UAV Implementations in Urban Planning and Related Sectors of Rapidly Developing Nations: A Review and Future Perspectives for Malaysia. Remote Sens. 2023, 15, 2845. [Google Scholar] [CrossRef]
- Roldán, J.J.; Joossen, G.; Sanz, D.; Cerro, J.D.; Barrientos, A. Mini-UAV based sensory system for measuring environmental variables in greenhouses. Sensors 2015, 15, 3334–3350. [Google Scholar] [CrossRef]
- Dara, S.K. The new integrated pest management paradigm for the modern age. J. Integr. Pest Manag. 2019, 10, 12. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned aerial vehicle for remote sensing applications—A review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Lee, B.; Park, P.; Kim, C.; Yang, S.; Ahn, S. Power management of a hybrid electric propulsion system for UAVs. J. Mech. Sci. Technol. 2012, 26, 2299. [Google Scholar] [CrossRef]
- Puppala, H.; Peddinti, P.R.; Tamvada, J.P.; Ahuja, J.; Kim, B. Barriers to the adoption of new technologies in rural areas: The case of unmanned aerial vehicles for precision agriculture in India. Technol. Soc. 2023, 74, 102335. [Google Scholar] [CrossRef]
- Xianping, W. Advantages of UAV flying defense operations and techniques during operation Qiao. Sci. Technol. Econ. Guide 2018, 26, 58. [Google Scholar]
- Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Chen, P. Applications, and prospects of agricultural unmanned aerial vehicle obstacle avoidance technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef]
- Nahiyoon, S.A.; Cui, L.; Yang, D.; Yan, X.; Rui, C.; Yuan, H. Biocidal radiuses of cycloxaprid, imidacloprid and lambda-cyhalothrin droplets controlling against cotton aphid (Aphis gossypii) using an unmanned aerial vehicle. Pest Manag. Sci. 2020, 76, 3029. [Google Scholar] [CrossRef]
- Palazzi, V.; Roselli, L.; Tentzeris, M.M.; Mezzanotte, P.; Alimenti, F. Energy-efficient harmonic transponder based on on-off keying modulation for both identification and sensing. Sensors 2022, 2, 620. [Google Scholar] [CrossRef]
- Turlings, T.C.; Erb, M. Tritrophic interactions mediated by herbivore-induced plant volatiles: Mechanisms, ecological relevance, and application potential. Annu. Rev. Entomol. 2018, 63, 452. [Google Scholar] [CrossRef]
- De Lange, E.S.; Salamanca, J.; Polashock, J.; Rodriguez-Saona, C. Genotypic variation and phenotypic plasticity in gene expression and emissions of herbivore-induced volatiles, and their potential tritrophic implications, in cranberries. J. Chem. Ecol. 2019, 45, 312. [Google Scholar] [CrossRef]
- Ximénez-Embún, M.G.; Castañera, P.; Ortego, F. Drought stress in tomato increases the performance of adapted and non-adapted strains of Tetranychus urticae. J. Insect Physiol. 2017, 96, 73–81. [Google Scholar] [CrossRef]
- Lacoste, C.; Nansen, C.; Thompson, S.; Moir-Barnetson, L.; Mian, A.; McNee, M.; Flower, K.C. Increased susceptibility to aphids of flowering wheat plants exposed to low temperatures. Environ. Entomol. 2015, 44, 618. [Google Scholar] [CrossRef] [PubMed]
- Weldegergis, B.T.; Zhu, F.; Poelman, E.H.; Dicke, M. Drought stress affects plant metabolites and herbivore preference but not host location by its parasitoids. Oecologia 2015, 177, 701–713. [Google Scholar] [CrossRef]
- Nansen, C.; Sidumo, A.J.; Martini, X.; Stefanova, K.; Roberts, J.D. Reflectance-based assessment of spider mite “bio-response” to maize leaves and plant potassium content in different irrigation regimes. Comput. Electron. Agric. 2013, 97, 26. [Google Scholar] [CrossRef]
- West, K.; Nansen, C. Smart-use of fertilizers to manage spider mites (Acari: Tetrachynidae) and other arthropod pests. Plant Sci. Today 2014, 1, 164. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.C. A review of unmanned system technologies with its application to aquaculture farm monitoring and management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, X.; Li, W.; Chen, S. Automatic power line inspection using UAV images. Remote Sens. 2017, 9, 824. [Google Scholar] [CrossRef]
- Bollas, N.; Kokinou, E.; Polychronos, V. Comparison of sentinel-2 and UAV multispectral data for use in precision agriculture: An application from northern Greece. Drones 2021, 5, 35. [Google Scholar] [CrossRef]
- Emimi, M.; Khaleel, M.; Alkrash, A. The current opportunities and challenges in drone technology. Int. J. Electr. Eng. Sustain. IJEES 2023, 74, 89. [Google Scholar]
- Liu, A.; Zhang, H.; Liao, C.; Zhang, Q.; Xiao, C.; He, J.; Luo, X. Effects of supplementary pollination by single-rotor agricultural unmanned aerial vehicle in hybrid rice seed production. Agric. Sci. Technol. 2017, 18, 552. [Google Scholar]
- Jiyu, L.; Lan, Y.; Jianwei, W.; Shengde, C.; Cong, H.; Qi, L.; Qiuping, L. Distribution law of rice pollen in the wind field of small UAV. Int. J. Agric. Biol. Eng. 2017, 10, 40. [Google Scholar] [CrossRef]
- Ivezić, A.; Trudić, B.; Stamenković, Z.; Kuzmanović, B.; Perić, S.; Ivošević, B.; Buđen, M.; Petrović, K. Drone-related agrotechnologies for precise plant protection in western balkans: Applications, possibilities, and legal framework limitations. Agronomy 2023, 13, 2615. [Google Scholar] [CrossRef]
- Berner, B.; Chojnacki, J. Influence of the air stream produced by the drone on the sedimentation of the sprayed liquid that contains entomopathogenic nematodes. J. Res. Appl. Agric. Eng. 2017, 62, 29. [Google Scholar]
- Van Lenteren, J.C.; Bolckmans, K.; Köhl, J.; Ravensberg, W.J.; Urbaneja, A. Biological control using invertebrates and microorganisms: Plenty of new opportunities. BioControl 2018, 63, 59. [Google Scholar] [CrossRef]
- Vincze, H.R. A Flying Start for Insects: Incorporating Drones in the Distribution of Insects Used as Biological Control Agents. Doctoral Dissertation, New Mexico State University, Las Cruces, NM, USA, 2022. [Google Scholar]
- Chaussé, S.; Jochems-Tanguay, L.; Boislard, T.; Cormier, D.; Boisclair, J. Lâchers de trichogrammes par drones, une nouvelle approche pour lutter contre la pyralide du maïs dans le maïs sucré de transformation. Congrès Annu. De La Société D’entomologie Du Québec 2017, 1, 24. [Google Scholar]
- Shapiro-Ilan, D.; Dolinski, C. Entomopathogenic nematode application technology. In Nematode Pathogenesis of Insects and Other Pests: Ecology and Applied Technologies for Sustainable Plant and Crop Protection; Springer Nature: Berlin/Heidelberg, Germany, 2015; p. 254. [Google Scholar]
- Rasmussen, J.; Nielsen, J.; Garcia-Ruiz, F.; Christensen, S.; Streibig, J.C. Potential uses of small, unmanned aircraft systems (UAS) in weed research. Weed Res. 2013, 53, 248. [Google Scholar] [CrossRef]
- Han, X.; Lei, Y.T.; Zhen, T.J.; Huang, Y. Analysis of factors influencing farmers’ willingness to continue using plant protection UAV based on TAM. J. Southwest Minzu Univ. Nat. Sci. Ed. 2022, 48, 339. [Google Scholar]
- Teske, A.L.; Chen, G.; Nansen, C.; Kong, Z. Optimised dispensing of predatory mites by multirotor UAVs in wind: A distribution pattern modelling approach for precision pest management. Biosyst. Eng. 2019, 187, 238. [Google Scholar] [CrossRef]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Yang, H. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: Current status and perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef]
- Lan, Y.B.; Wang, G.B. Development Situation and Prospect of Plant Protection UAV in China. Agr. Eng. Technol. 2018, 38, 17â. [Google Scholar]
- Fikri, M.R.; Candra, T.; Saptaji, K.; Noviarini, A.N.; Wardani, D.A. A review of Implementation and Challenges of Unmanned Aerial Vehicles for Spraying Applications and Crop Monitoring in Indonesia. arXiv 2021, arXiv:230.00379. [Google Scholar]
- Daponte, P.; Vito, D.L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012022. [Google Scholar] [CrossRef]
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Orchard management with small unmanned aerial vehicles: A survey of sensing and analysis approaches. Precis. Agric. 2021, 22, 2052. [Google Scholar] [CrossRef]
- Tao, W.; Wang, X.; Xue, J.H.; Su, W.; Zhang, M.; Yin, D.; Zhang, Y. Monitoring the damage of armyworm as a pest in summer corn by unmanned aerial vehicle imaging. Pest Manag. Sci. 2022, 78, 2276. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.; Huang, Z.; Zheng, Z.; Lan, Y.; Dai, F. Field detection and classification of citrus Huanglongbing based on hyperspectral reflectance. Comput. Electron. Agric. 2019, 167, 105006. [Google Scholar] [CrossRef]
- Hou, C.; Tang, Y.; Luo, S.; Lin, J.; He, Y.; Zhuang, J.; Huang, W. Optimization of control parameters of droplet density in citrus trees using UAVs and the Taguchi method. Int. J. Agric. Biol. Eng. 2019, 12, 9. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.NO | Name | Type | Characteristics | Source |
|---|---|---|---|---|
| 1 | Beidatong | Vegetable oils | Anti-evaporation, anti-drift | Hebei Mingshun Agricultural Technology Co., Ltd., Hebei, China |
| 2 | Maifei (MF) | Increases wetting and spreading of droplets on the leaf | Beijing Grand Agrochem Co., Ltd., Beijing China | |
| 3 | Atplus Mso-Hs 500 | Anti-evaporation, anti-drift | Britain Croda, Co., Ltd., United Kingdom | |
| 4 | Y-20079 | Organosilicon | Increases wetting and spreading, anti-drift, improved efficacy | American Masan High-tech Materials, Co., Ltd., United Kingdom |
| 5 | Surfom ADJ8860 | Reduces droplet surface tension, contact angle, and wetting time, inhibits droplet rebound | Brazil Oxiteno, Co., Ltd., São Paulo, Brazil. | |
| 6 | Lieying | Reduces droplet surface tension, increases adhesion | Anyang Quanfeng Aviation Plant Protection Technology Co., Ltd., China | |
| 7 | Starguar4A | Polymers | Anti-drift, anti-evaporation, increases adhesion on leaf, anti-bounce | Belgium Solvay, Co., Ltd., Brussels, Belgium |
| 8 | Starguar4 | Anti-drift, anti-evaporation, increases adhesion on leaf, anti-bounce | ||
| 9 | Ultimate | Reduces droplet ST and contact angle, increases wetting and spreading, anti-drift | ||
| 10 | Silwet DRS-60 | Anti-drift, increases wetting, adhesion, and cuticle penetration | American Masan High-tech Materials, Co., Ltd., United Kingdom | |
| 11 | G2801 | Increases droplet deposition and adhesion | Shantou Daqian Research Center of Advanced Science & Technology Co., Ltd., China | |
| 12 | DS10870 | Reduces droplet surface tension, increases viscosity, anti-evaporation, anti-drift | Huntsman Chemical Trading, Shanghai, Co., Ltd., China | |
| 13 | InterLock™ | Anti-Drift | Increases droplet size and weight to reduce drift enhances deposition | Winfield United, Arden Hills, MN 55126, Co., Ltd., United States |
| 14 | Drift-X™ | Modifies droplet size and velocity to minimize drift, improves droplet adhesion | BASF, Co., Ltd., Germany | |
| 15 | Leverage® GT | Reduces fine droplet formation to minimize drift | Corteva Agriscience, Co., Ltd., American | |
| 16 | Drift-Not® | Adjusts droplet size and velocity to reduce off-target movement | Bayer Crop Science, Co., Ltd., Rhein, Germany | |
| 17 | IPP-4 | Anti-drift, increases wetting, adhesion, and cuticle penetration | Institute of Plant Protection-GSCAAS, Beijing, China |
| Technologies | Detailed Description | Key Features | Advantages | Disadvantages |
|---|---|---|---|---|
| Anti-drift adjuvant | Amends physical parameters and reduces drift. | Enhances droplet cohesiveness, minimizing wind drift. | Increases efficacy, and reduces the dosage. | Potential for chemical incompatibility with certain pesticides. |
| Anti-drift nozzle | Design with precise delivery of amounts. | Reduces the number of fine droplets, lowering drift potential. | Easy to retrofit on existing equipment. | Coverage at lower application rates. |
| Flight parameters | Adjustments in application, UAVs to optimize spray deposition and minimize drift. | Includes adjustments to height, speed, and spray angle. | Optimizes application under varying operational conditions. | Requires precise control and monitoring, which can be challenging in rough terrain. |
| Drift model | Computational or physical models are used to predict the path and deposition of spray droplets under various conditions. | Assists in developing guidelines and regulations for spray applications. | Helps in planning and regulatory compliance; can be tailored to local conditions. | Relies on accurate input data; may not capture all environmental variables. |
| Electrostatic spraying | Spraying method that charges droplets to attract them to the target, enhancing deposition and reducing drift. | Increases spray efficiency and coverage on target surfaces. | Improves target specificity, reducing waste and environmental impact. | Equipment costs and maintenance are high; and not suitable for all types of chemicals. |
| Smart atomizers | Technology-driven sprayers that adjust droplet size and spray parameters in real-time based on environmental sensors. | Optimizes spray applications, dynamically responding to wind and movement. | High precision in application; reduces chemical use and environmental impact. | Complex systems that require significant investment and maintenance. |
| Hyperspectral sensors | Sensors that capture and process information from across the electromagnetic spectrum. | Allows detailed detection of crop health and characteristics for precision application of inputs. | Enables highly detailed imaging for precise agronomic decisions. | Typically, more expensive and data-intensive compared to other sensor types. |
| Multispectral sensors | Sensors that measure specific wavelengths of light to assess plant health and other environmental conditions. | Commonly used in agriculture for assessing plant health and soil properties. | More affordable and easier to deploy than hyperspectral sensors, good for large-scale use. | Provides less detailed data than hyperspectral sensors. |
| Ultrasonic sensors | Sensors that use sound waves to measure distances or detect object characteristics. | Useful for determining plant canopy density and ground topography. Can operate in various weather conditions, reliable for real-time adjustments. | Limited in data complexity, affected by air temperature and humidity. | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nahiyoon, S.A.; Ren, Z.; Wei, P.; Li, X.; Li, X.; Xu, J.; Yan, X.; Yuan, H. Recent Development Trends in Plant Protection UAVs: A Journey from Conventional Practices to Cutting-Edge Technologies—A Comprehensive Review. Drones 2024, 8, 457. https://doi.org/10.3390/drones8090457
Nahiyoon SA, Ren Z, Wei P, Li X, Li X, Xu J, Yan X, Yuan H. Recent Development Trends in Plant Protection UAVs: A Journey from Conventional Practices to Cutting-Edge Technologies—A Comprehensive Review. Drones. 2024; 8(9):457. https://doi.org/10.3390/drones8090457
Chicago/Turabian StyleNahiyoon, Shahzad Ali, Zongjie Ren, Peng Wei, Xi Li, Xiangshuai Li, Jun Xu, Xiaojing Yan, and Huizhu Yuan. 2024. "Recent Development Trends in Plant Protection UAVs: A Journey from Conventional Practices to Cutting-Edge Technologies—A Comprehensive Review" Drones 8, no. 9: 457. https://doi.org/10.3390/drones8090457