
Fixed-Time Fault-Tolerant Adaptive Neural Network Control for a Twin-Rotor UAV System with Sensor Faults and Disturbances


Abstract
1. Introduction
1.1. Related Works
1.2. Research Motivation
1.3. Proposed Methodology and Contributions
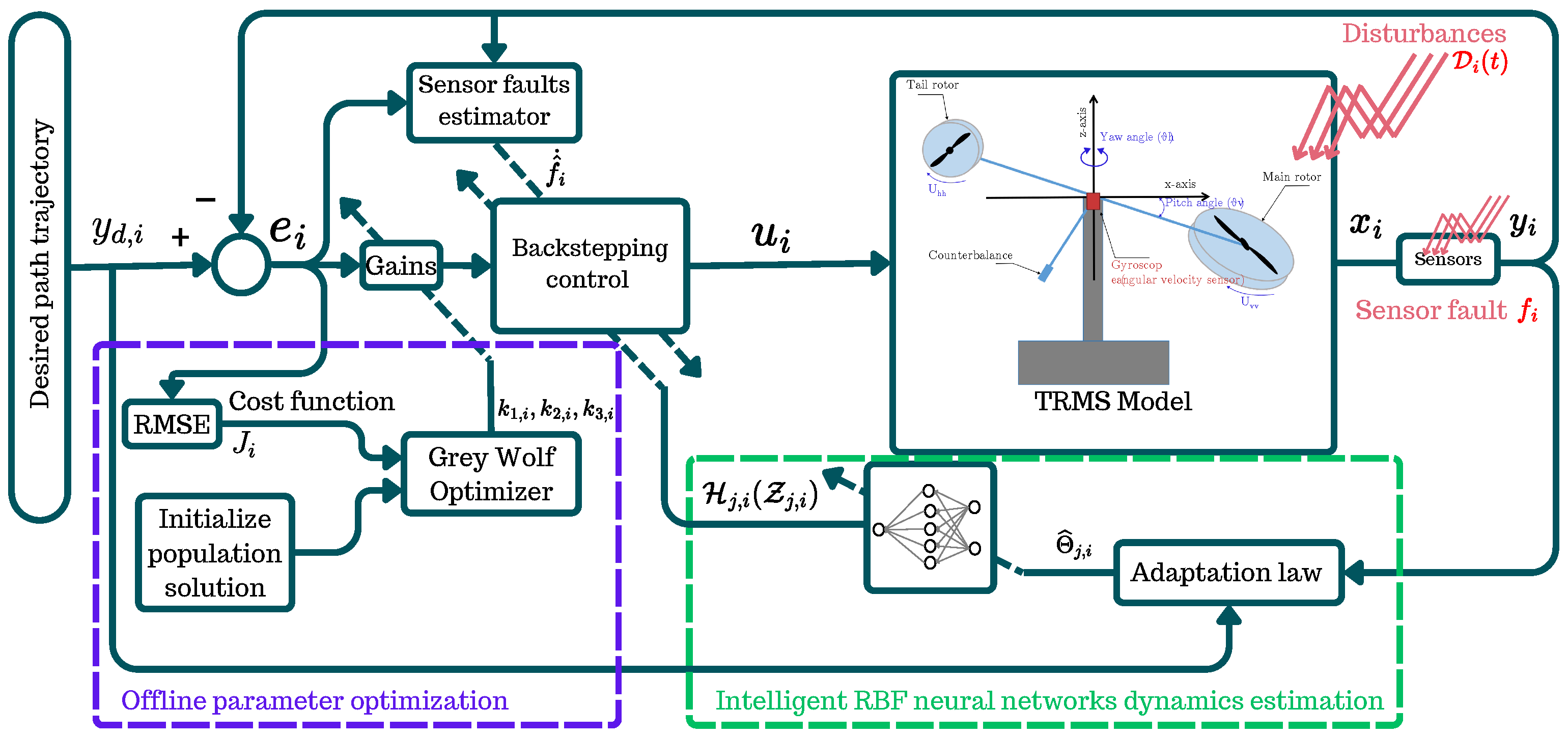
- A novel fault-tolerant control strategy for the TRMS that ensures stability and robust tracking performance is proposed. Our approach utilizes a backstepping technique combined with an RBFNN adaptive estimator. By employing this method, we can guarantee robust control performance while maintaining accurate tracking of desired trajectories.
- The issue of sensor faults in the control system is addressed by incorporating active fault-tolerant control techniques, which ensure the system’s resilience in the presence of these faults and preserve reliable flight operations.
- To guarantee the stability of the entire closed-loop system, we employ Lyapunov’s theorem, which offers mathematical proof of fixed-time stability. Hence, fixed-time stabilization provides a robust and efficient solution for flight systems facing disturbances and sensor faults, ensuring rapid responses, stable performance, and enhanced safety.
- To identify the best control parameter values and address the selection problem, we introduce a metaheuristic optimization algorithm based on GWO. This algorithm allows us to automatically select the optimal design and improves the performance of the TRMS.
- i.
- Unlike classical controllers [27,28], which depend on accurate system modeling and extensive tuning, the proposed controller is model-free and does not require a detailed model. This flexibility allows it to better handle uncertainties and dynamic changes, providing more robust and reliable performance across various scenarios.
- ii.
- Unlike the approaches in [29,30], which focus on algebraic methods, our controller incorporates fixed-time stability guarantees. This ensures that the system’s stability is achieved within a finite time frame, regardless of initial conditions or disturbances, providing superior robustness and reliability compared to algebraic methods that may not account for time-dependent stability.
- iii.
- Unlike [13,31], who employ a separate neural network for each unknown nonlinear function, our proposed design uses a single neural network for each subsystem. This streamlined approach significantly reduces computational complexity and simplifies implementation, offering a more efficient and manageable control system design.
- iv.
- Our proposed active fault-tolerant control structure integrates fault estimation and compensation directly, unlike the approaches in [32,33], which require a separate observer for these tasks. This integrated design simplifies the control system and improves overall efficiency by eliminating the need for an additional observer.
2. Foundational Concepts and Model Formulation
2.1. Essential Preliminaries: Fixed-Time Stability and Radial Basis Function Neural Networks
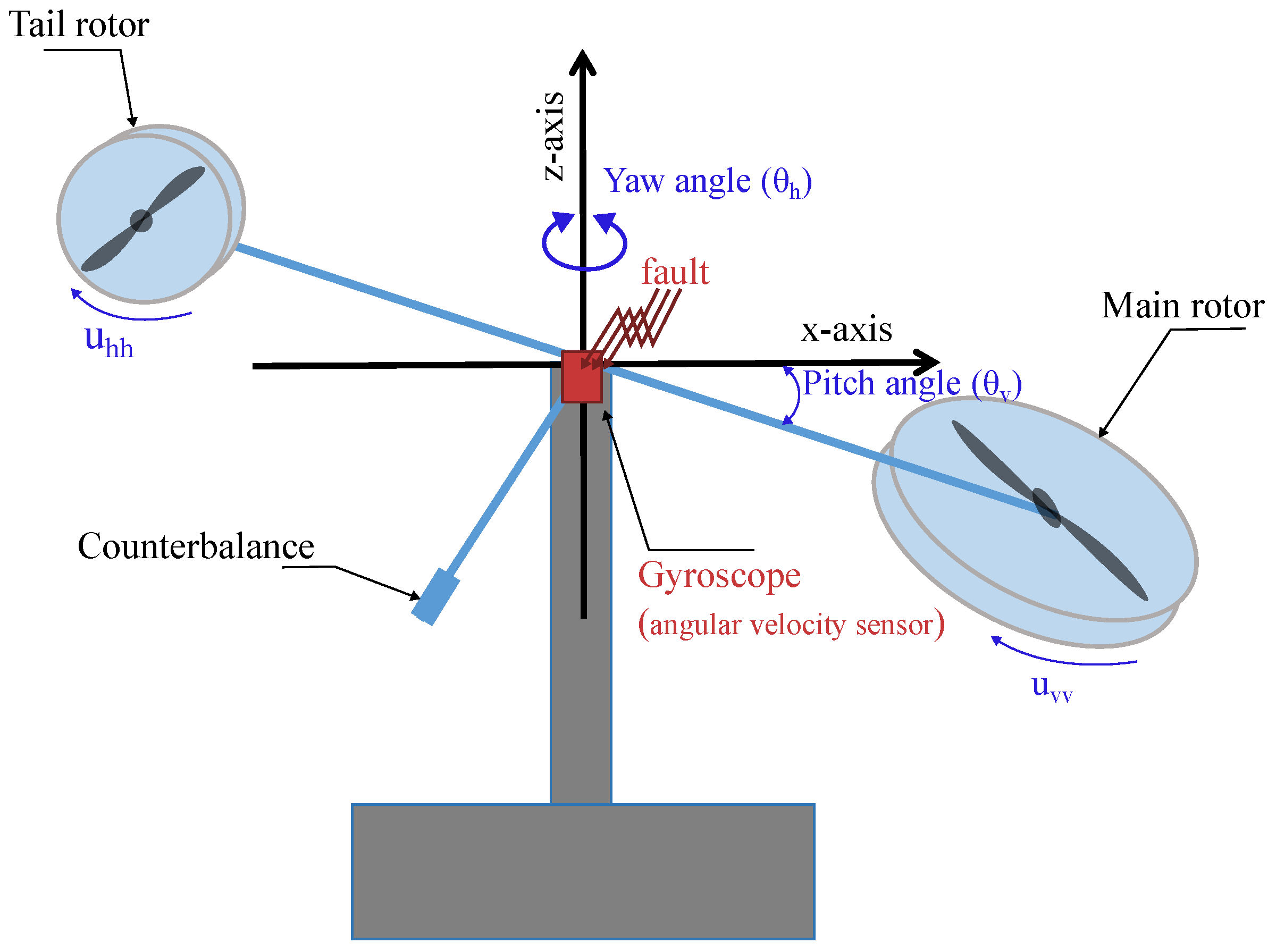
2.2. Twin-Rotor MIMO System: Description and Dynamic Modeling
3. Control Design
3.1. Fault-Tolerant Fixed-Time Control Design
3.2. Optimization of Control Parameters
| Algorithm 1: GWO pseudo-code |
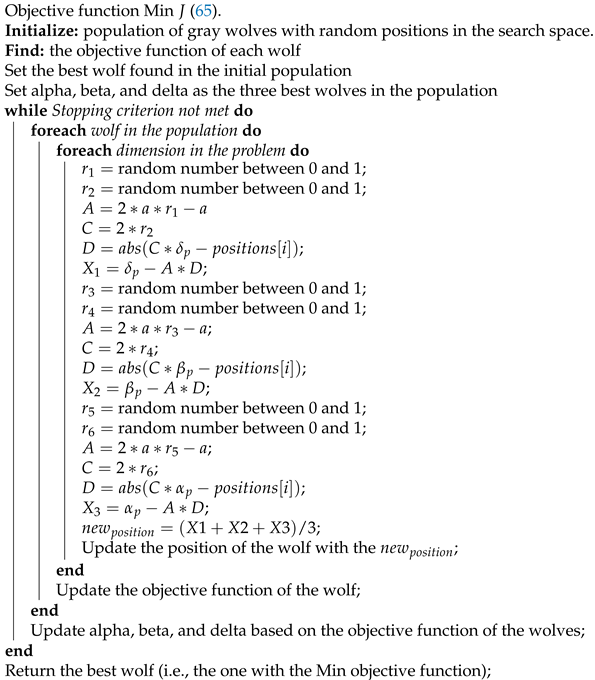 |
4. Simulation Results and Discussion
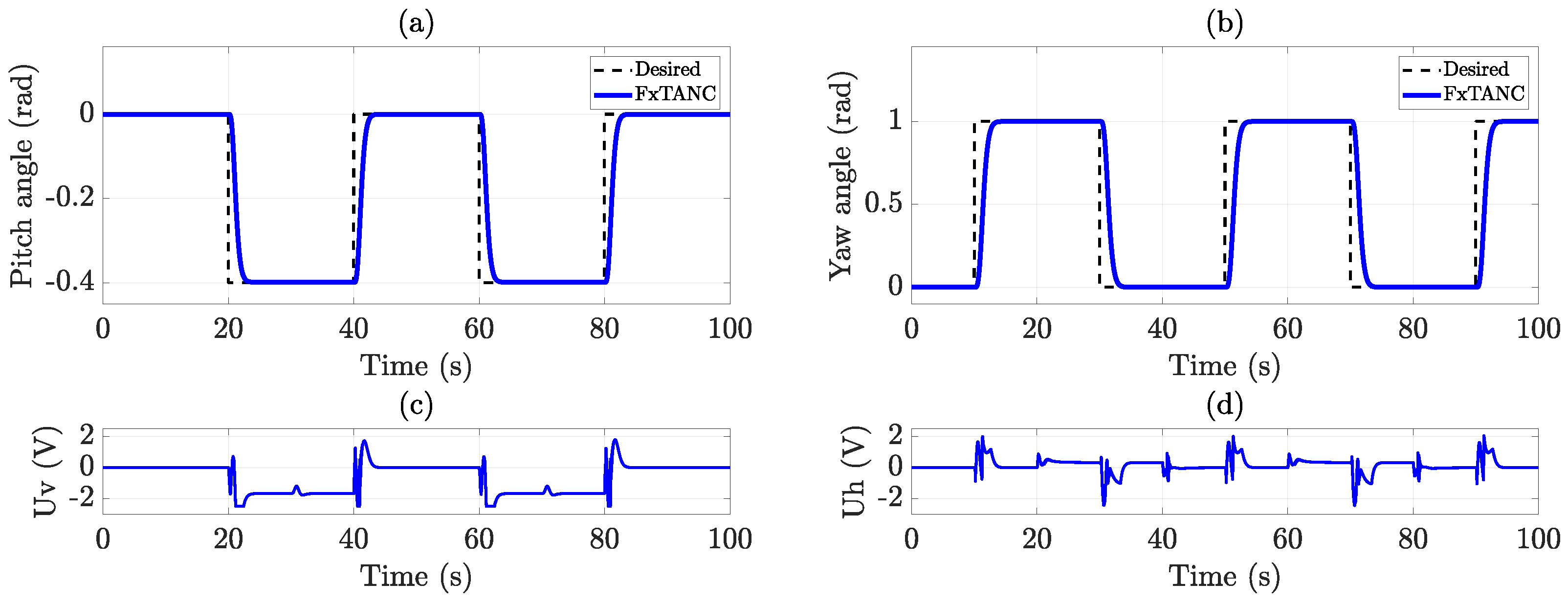
4.1. Case 1: Square-Wave Tracking
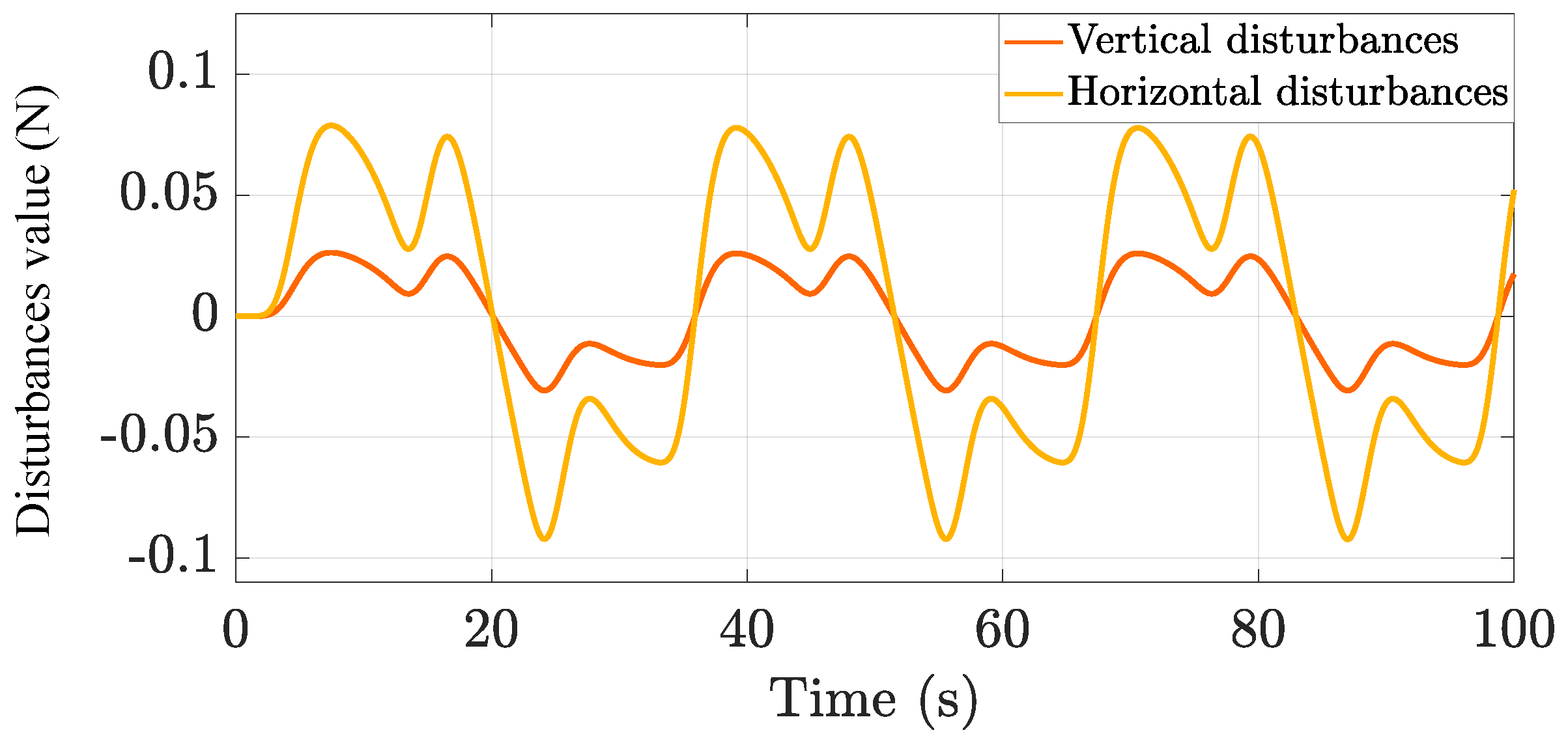
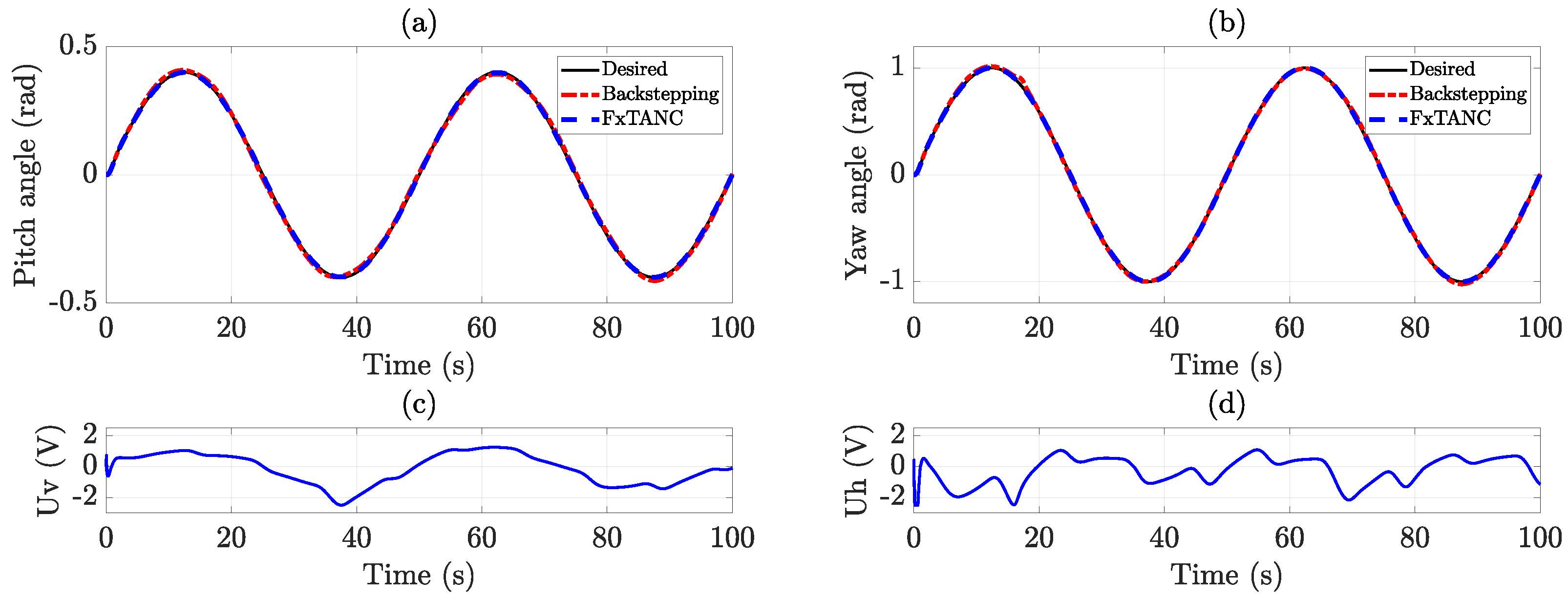
4.2. Case 2: Sine-Wave Tracking
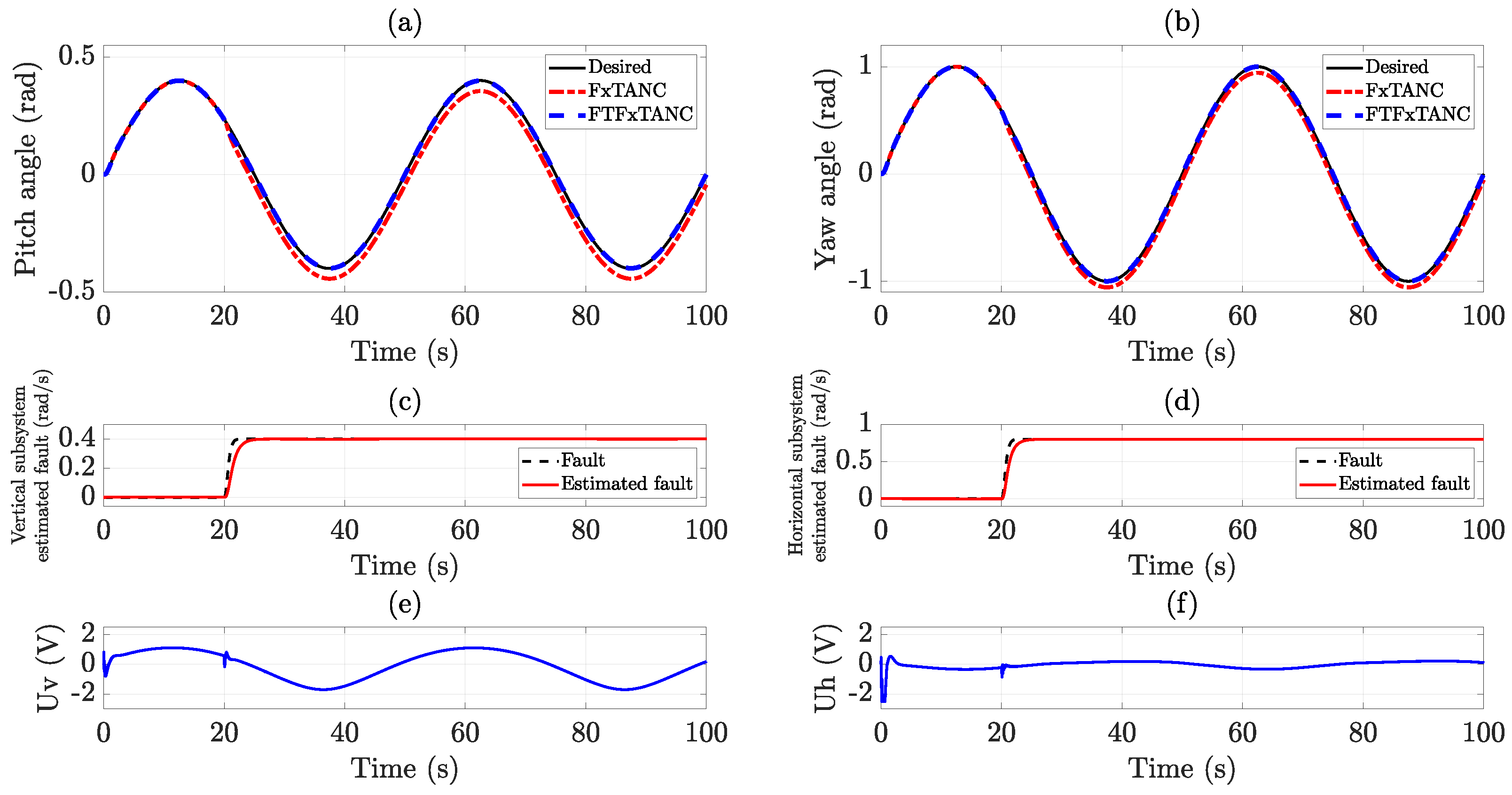
4.3. Case 3: Bias Sensor Faults
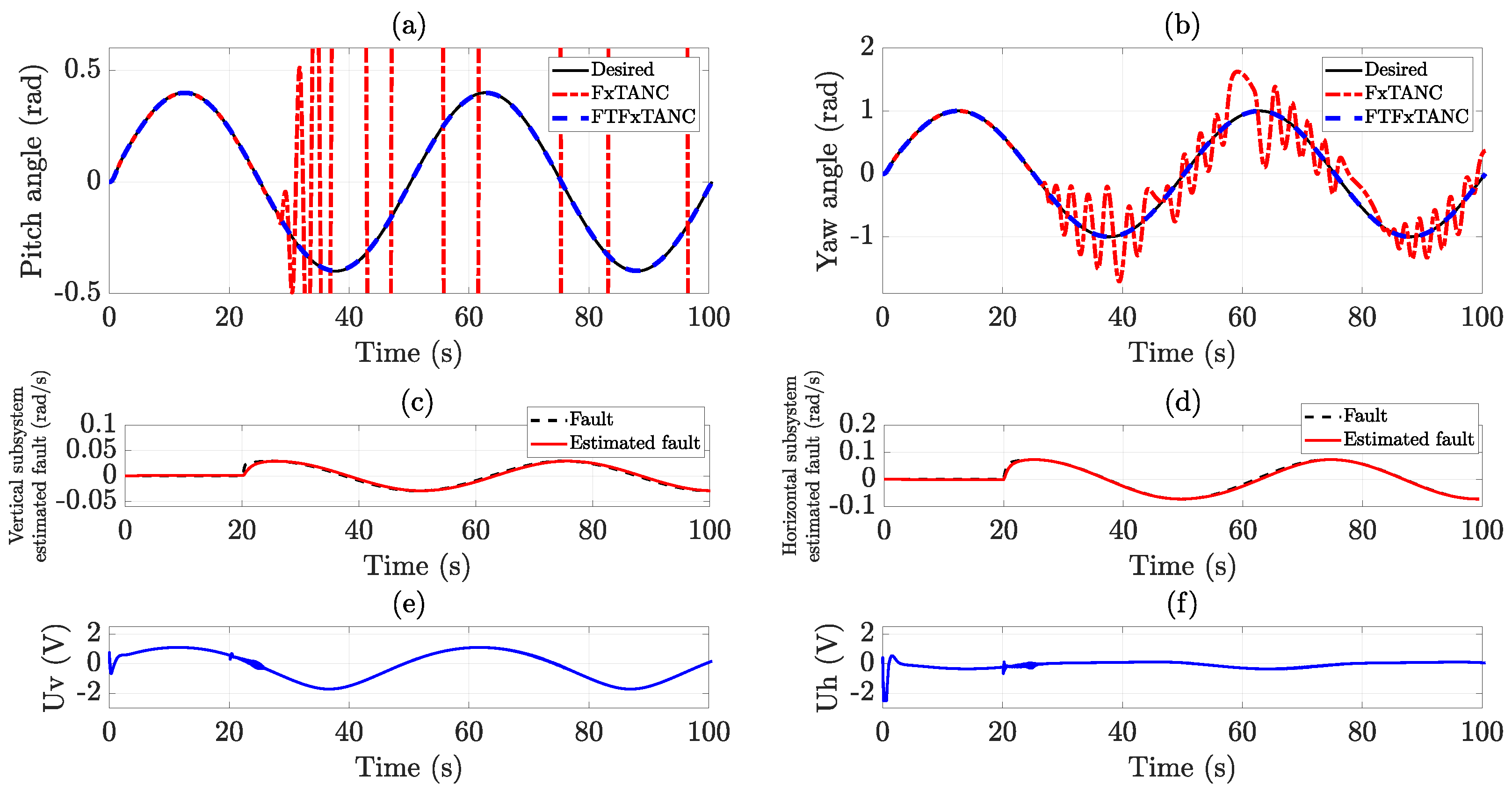
4.4. Case 4: Drift Sensor Faults
4.5. Case 5: Loss of Accuracy Sensor Faults
4.6. Case 6: Loss of Effectiveness Sensor Faults
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abdelmaksoud, S.I.; Mailah, M.; Abdallah, A.M. Control strategies and novel techniques for autonomous rotorcraft unmanned aerial vehicles: A review. IEEE Access 2020, 8, 195142–195169. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Han, J.; Zhang, J.; Lv, C.; He, C.; Wei, H.; Zhao, S. Robust Fault Tolerant Path Tracking Control for Intelligent Vehicle under Steering System Faults. IEEE Trans. Intell. Veh. 2024. early access. [Google Scholar] [CrossRef]
- Glida, H.-E.; Sentouh, C.; Chelihi, A.; Floris, J.; Popieul, J.-C. Event-Triggered Adaptive Fault-Tolerant Control Based on Sliding Mode/Neural Network for Lane Keeping Assistance Systems in Steer-by-Wire Vehicles. IEEE Trans. Intell. Veh. 2024. early access. [Google Scholar] [CrossRef]
- Lippiello, V.; Ruggiero, F.; Serra, D. Emergency landing for a quadrotor in case of a propeller failure: A backstepping approach. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 4782–4788. [Google Scholar]
- Nasiri, A.; Nguang, S.K.; Swain, A.; Almakhles, D. Passive actuator fault tolerant control for a class of MIMO nonlinear systems with uncertainties. Int. J. Control 2019, 92, 693–704. [Google Scholar] [CrossRef]
- Raval, S.; Patel, H.R.; Patel, S.; Shah, V.A. Passive fault-tolerant control scheme for nonlinear level control system with parameter uncertainty and actuator fault. In Proceedings of the North American Fuzzy Information Processing Society Annual Conference, Halifax, NS, Canada, 31 May–3 June 2022; Springer: Cham, Switzerland, 2022; pp. 229–242. [Google Scholar]
- Su, Y.; Yu, P.; Gerber, M.J.; Ruan, L.; Tsao, T.C. Fault-tolerant control of an overactuated uav platform built on quadcopters and passive hinges. IEEE/ASME Trans. Mechatron. 2023, 29, 602–613. [Google Scholar] [CrossRef]
- Ke, C.; Cai, K.Y.; Quan, Q. Uniform passive fault-tolerant control of a quadcopter with one, two, or three rotor failure. IEEE Trans. Robot. 2023, 39, 4297–4311. [Google Scholar] [CrossRef]
- Yao, Z.; Kan, Z.; Zhen, C.; Shao, H.; Li, D. Fault-Tolerant control for carrier-based UAV based on sliding mode method. Drones 2023, 7, 194. [Google Scholar] [CrossRef]
- Wang, B.; Shen, Y.; Li, N.; Zhang, Y.; Gao, Z. An adaptive sliding mode fault-tolerant control of a quadrotor unmanned aerial vehicle with actuator faults and model uncertainties. Int. J. Robust Nonlinear Control 2023, 33, 10182–10198. [Google Scholar] [CrossRef]
- Zeghlache, S.; Rahali, H.; Djerioui, A.; Benyettou, L.; Benkhoris, M.F. Robust adaptive backstepping neural networks fault tolerant control for mobile manipulator UAV with multiple uncertainties. Math. Comput. Simul. 2024, 218, 556–585. [Google Scholar] [CrossRef]
- Bounemeur, A.; Chemachema, M.; Essounbouli, N. Indirect adaptive fuzzy fault-tolerant tracking control for MIMO nonlinear systems with actuator and sensor failures. ISA Trans. 2018, 79, 45–61. [Google Scholar] [CrossRef]
- Ahmadi, K.; Asadi, D.; Merheb, A.; Nabavi-Chashmi, S.Y.; Tutsoy, O. Active fault-tolerant control of quadrotor UAVs with nonlinear observer-based sliding mode control validated through hardware in the loop experiments. Control Eng. Pract. 2023, 137, 105557. [Google Scholar] [CrossRef]
- Shabbir, W.; Aijun, L.; Yuwei, C. Neural network-based sensor fault estimation and active fault-tolerant control for uncertain nonlinear systems. J. Frankl. Inst. 2023, 360, 2678–2701. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Pitakwatchara, P. Attitude fault-tolerant control of aerial robots with sensor faults and disturbances. Drones 2023, 7, 156. [Google Scholar] [CrossRef]
- Hu, X.; Wang, B.; Shen, Y.; Fu, Y.; Li, N. Disturbance observer-enhanced adaptive fault-tolerant control of a quadrotor UAV against actuator faults and disturbances. Drones 2023, 7, 541. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef]
- Glida, H.E.; Chelihi, A.; Abdou, L.; Sentouh, C.; Perozzi, G. Trajectory tracking control of a coaxial rotor drone: Time-delay estimation-based optimal model-free fuzzy logic approach. ISA Trans. 2023, 137, 236–247. [Google Scholar] [CrossRef] [PubMed]
- Glida, H.E.; Sentouh, C.; Rath, J.J. Optimal Model-Free Finite-Time Control Based on Terminal Sliding Mode for a Coaxial Rotor. Drones 2023, 7, 706. [Google Scholar] [CrossRef]
- Glida, H.E.; Abdou, L.; Chelihi, A.; Sentouh, C.; Hasseni, S.E.I. Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 2020, 100, 3449–3468. [Google Scholar] [CrossRef]
- Feedback Instruments Ltd. Twin Rotor MIMO System Control Experiments 33-949S; Feedback Instruments Ltd.: Crowborough, UK, 2006. [Google Scholar]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Hatta, N.; Zain, A.M.; Sallehuddin, R.; Shayfull, Z.; Yusoff, Y. Recent studies on optimisation method of Grey Wolf Optimiser (GWO): A review (2014–2017). Artif. Intell. Rev. 2019, 52, 2651–2683. [Google Scholar] [CrossRef]
- Lai, W.; Kuang, M.; Wang, X.; Ghafariasl, P.; Sabzalian, M.H.; Lee, S. Skin cancer diagnosis (SCD) using Artificial Neural Network (ANN) and Improved Gray Wolf Optimization (IGWO). Sci. Rep. 2023, 13, 19377. [Google Scholar] [CrossRef]
- Cai, Z.; Dai, S.; Ding, Q.; Zhang, J.; Xu, D.; Li, Y. Gray wolf optimization-based wind power load mid-long term forecasting algorithm. Comput. Electr. Eng. 2023, 109, 108769. [Google Scholar] [CrossRef]
- Perozzi, G.; Efimov, D.; Biannic, J.M.; Planckaert, L. Trajectory tracking for a quadrotor under wind perturbations: Sliding mode control with state-dependent gains. J. Frankl. Inst. 2018, 355, 4809–4838. [Google Scholar] [CrossRef]
- Kapnopoulos, A.; Kazakidis, C.; Alexandridis, A. Quadrotor trajectory tracking based on backstepping control and radial basis function neural networks. Results Control Optim. 2024, 14, 100335. [Google Scholar] [CrossRef]
- Younes, Y.A.; Drak, A.; Noura, H.; Rabhi, A.; Hajjaji, A.E. Robust model-free control applied to a quadrotor UAV. J. Intell. Robot. Syst. 2016, 84, 37–52. [Google Scholar] [CrossRef]
- Barth, J.M.; Condomines, J.P.; Bronz, M.; Moschetta, J.M.; Join, C.; Fliess, M. Model-free control algorithms for micro air vehicles with transitioning flight capabilities. Int. J. Micro Air Veh. 2020, 12, 1756829320914264. [Google Scholar] [CrossRef]
- Guettal, L.; Glida, H.E.; Chelihi, A. Adaptive fuzzy-neural network based decentralized backstepping controller for attitude control of quadrotor helicopter. In Proceedings of the 2020 1st International Conference on Communications, Control Systems and Signal Processing (CCSSP), El Oued, Algeria, 16–17 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 394–399. [Google Scholar]
- Bey, O.; Chemachema, M. Finite-time event-triggered output-feedback adaptive decentralized echo-state network fault-tolerant control for interconnected pure-feedback nonlinear systems with input saturation and external disturbances: A fuzzy control-error approach. Inf. Sci. 2024, 669, 120557. [Google Scholar] [CrossRef]
- Hernández-González, O.; Ramírez-Rasgado, F.; Farza, M.; Guerrero-Sánchez, M.E.; Astorga-Zaragoza, C.M.; M’Saad, M.; Valencia-Palomo, G. Observer for Nonlinear Systems with Time-Varying Delays: Application to a Two-Degrees-of-Freedom Helicopter. Aerospace 2024, 11, 206. [Google Scholar] [CrossRef]
- Zuo, Z.; Tian, B.; Defoort, M.; Ding, Z. Fixed-Time Consensus Tracking for Multiagent Systems With High-Order Integrator Dynamics. IEEE Trans. Autom. Control 2018, 63, 563–570. [Google Scholar] [CrossRef]
- Ba, D.; Li, Y.X.; Tong, S. Fixed-time adaptive neural tracking control for a class of uncertain nonstrict nonlinear systems. Neurocomputing 2019, 363, 273–280. [Google Scholar] [CrossRef]
- Du, H.; Shao, H.; Yao, P. Adaptive neural network control for a class of low-triangular-structured nonlinear systems. IEEE Trans. Neural Netw. 2006, 17, 509–514. [Google Scholar] [CrossRef] [PubMed]
- Ge, S.S.; Hang, C.C.; Lee, T.H.; Zhang, T. Stable Adaptive Neural Network Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 13. [Google Scholar]
- Shaik, F.A.; Purwar, S. A nonlinear state observer design for 2-DOF twin rotor system using neural networks. In Proceedings of the 2009 International Conference on Advances in Computing, Control, and Telecommunication Technologies, Bangalore, India, 28–29 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 15–19. [Google Scholar] [CrossRef]
- Glida, H.E.; Abdou, L.; Chelihi, A.; Sentouh, C.; Perozzi, G. Optimal model-free fuzzy logic control for autonomous unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 952–967. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Hao, P.; Sobhani, B. Application of the improved chaotic grey wolf optimization algorithm as a novel and efficient method for parameter estimation of solid oxide fuel cells model. Int. J. Hydrogen Energy 2021, 46, 36454–36465. [Google Scholar] [CrossRef]
- Li, H.; Liu, X.; Huang, Z.; Zeng, C.; Zou, P.; Chu, Z.; Yi, J. Newly emerging nature-inspired optimization-algorithm review, unified framework, evaluation, and behavioural parameter optimization. IEEE Access 2020, 8, 72620–72649. [Google Scholar] [CrossRef]
- He, C.; Wu, J.; Dai, J.; Zhe, Z.; Tong, T. Fixed-Time Adaptive Neural Tracking Control for a Class of Uncertain Nonlinear Pure-Feedback Systems. IEEE Access 2020, 8, 28867–28879. [Google Scholar] [CrossRef]
- Haruna, A.; Mohamed, Z.; Efe, M.Ö.; Basri, M.A.M. Dual boundary conditional integral backstepping control of a twin rotor MIMO system. J. Frankl. Inst. 2017, 354, 6831–6854. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subsystem | Gains |
|---|---|
| Vertical | |
| Horizontal | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bacha, A.; Chelihi, A.; Glida, H.E.; Sentouh, C. Fixed-Time Fault-Tolerant Adaptive Neural Network Control for a Twin-Rotor UAV System with Sensor Faults and Disturbances. Drones 2024, 8, 467. https://doi.org/10.3390/drones8090467
Bacha A, Chelihi A, Glida HE, Sentouh C. Fixed-Time Fault-Tolerant Adaptive Neural Network Control for a Twin-Rotor UAV System with Sensor Faults and Disturbances. Drones. 2024; 8(9):467. https://doi.org/10.3390/drones8090467
Chicago/Turabian StyleBacha, Aymene, Abdelghani Chelihi, Hossam Eddine Glida, and Chouki Sentouh. 2024. "Fixed-Time Fault-Tolerant Adaptive Neural Network Control for a Twin-Rotor UAV System with Sensor Faults and Disturbances" Drones 8, no. 9: 467. https://doi.org/10.3390/drones8090467
APA StyleBacha, A., Chelihi, A., Glida, H. E., & Sentouh, C. (2024). Fixed-Time Fault-Tolerant Adaptive Neural Network Control for a Twin-Rotor UAV System with Sensor Faults and Disturbances. Drones, 8(9), 467. https://doi.org/10.3390/drones8090467