

Fixed/Mobile Collaborative Traffic Flow Detection Study Based on Wireless Charging of UAVs

Abstract
:1. Introduction
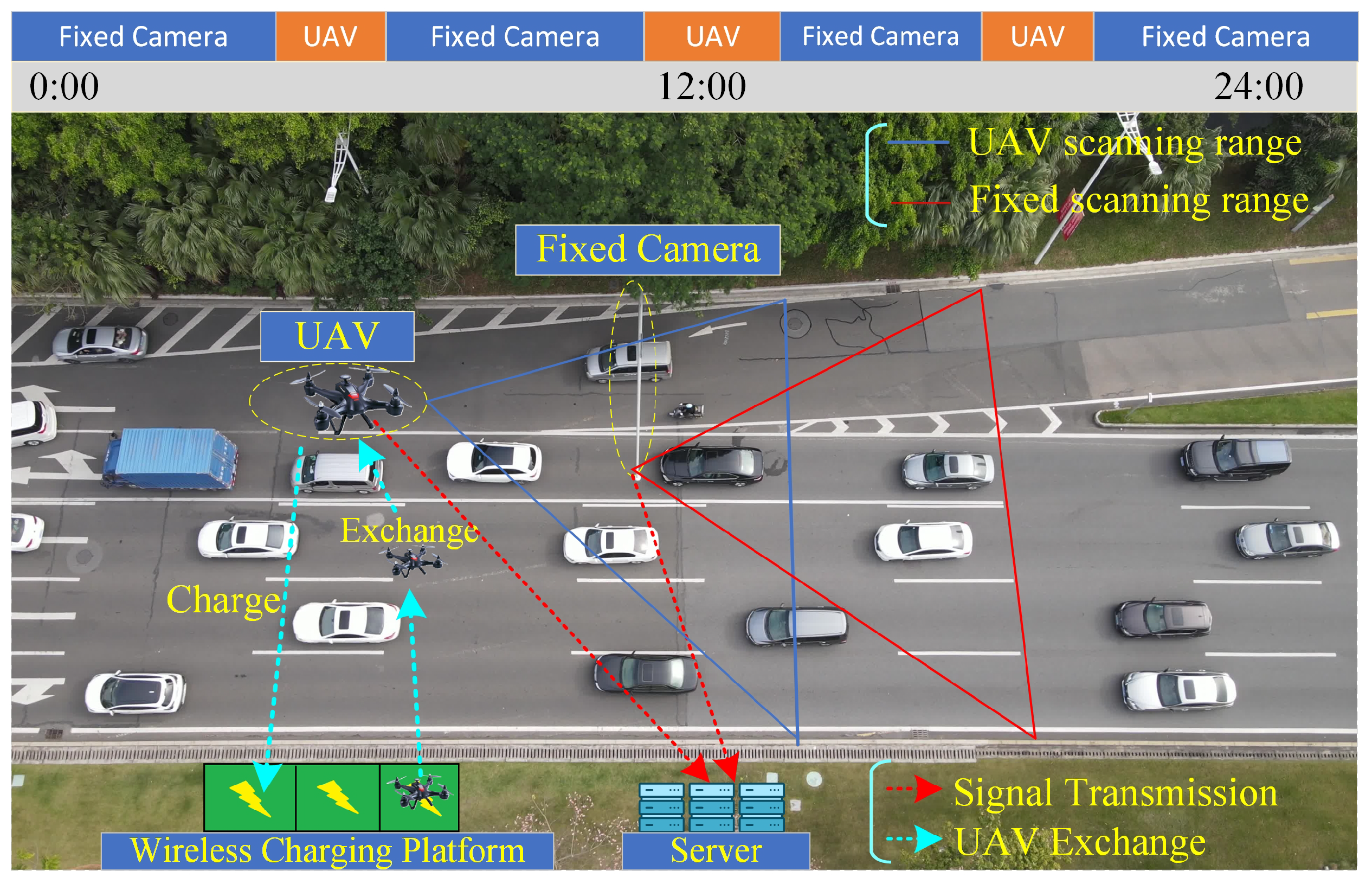
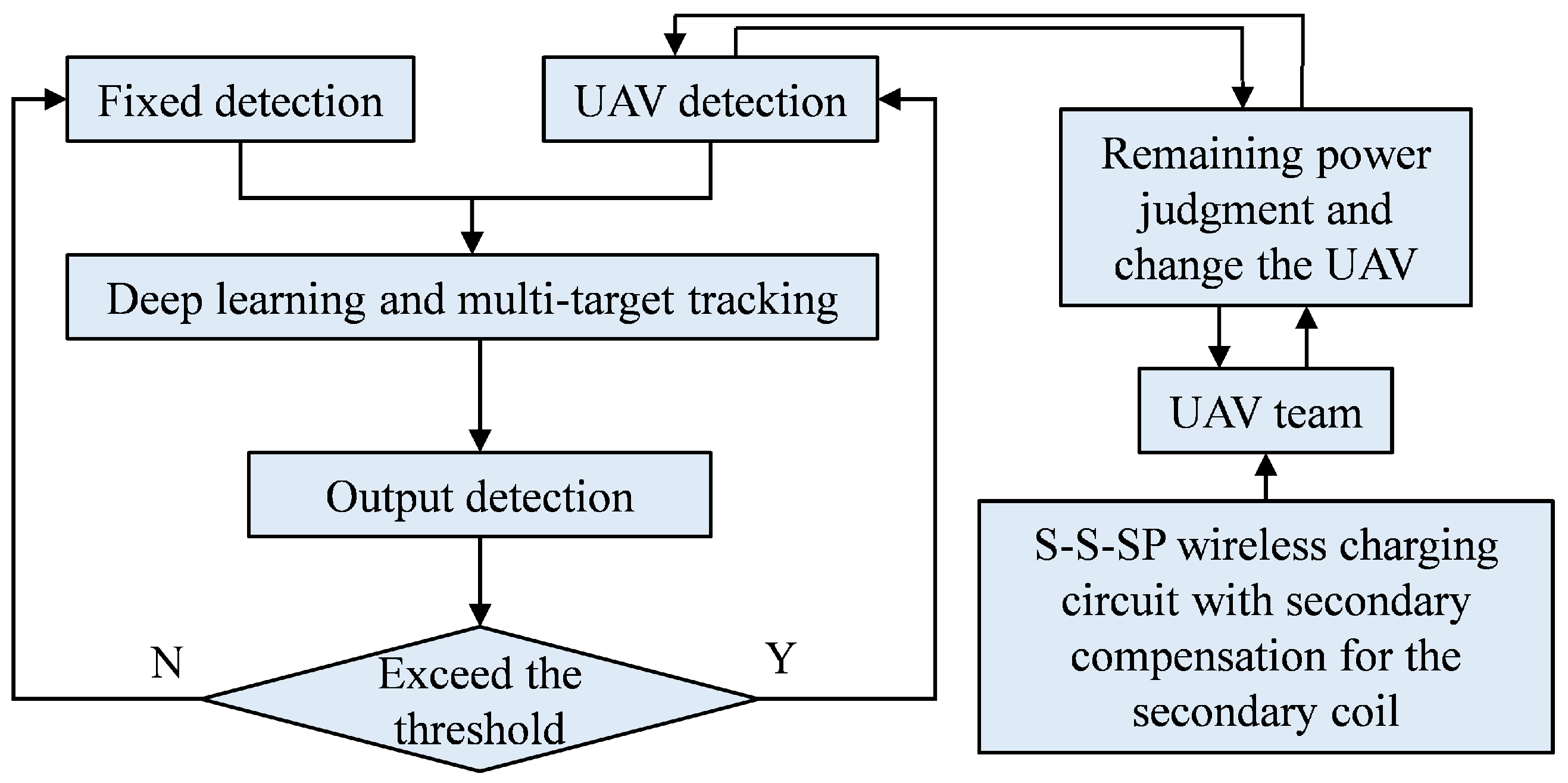
2. Fixed/Mobile Collaborative Road Traffic Detection Framework and Its Switching Strategy
3. UAV Wireless Charging Design and Trajectory
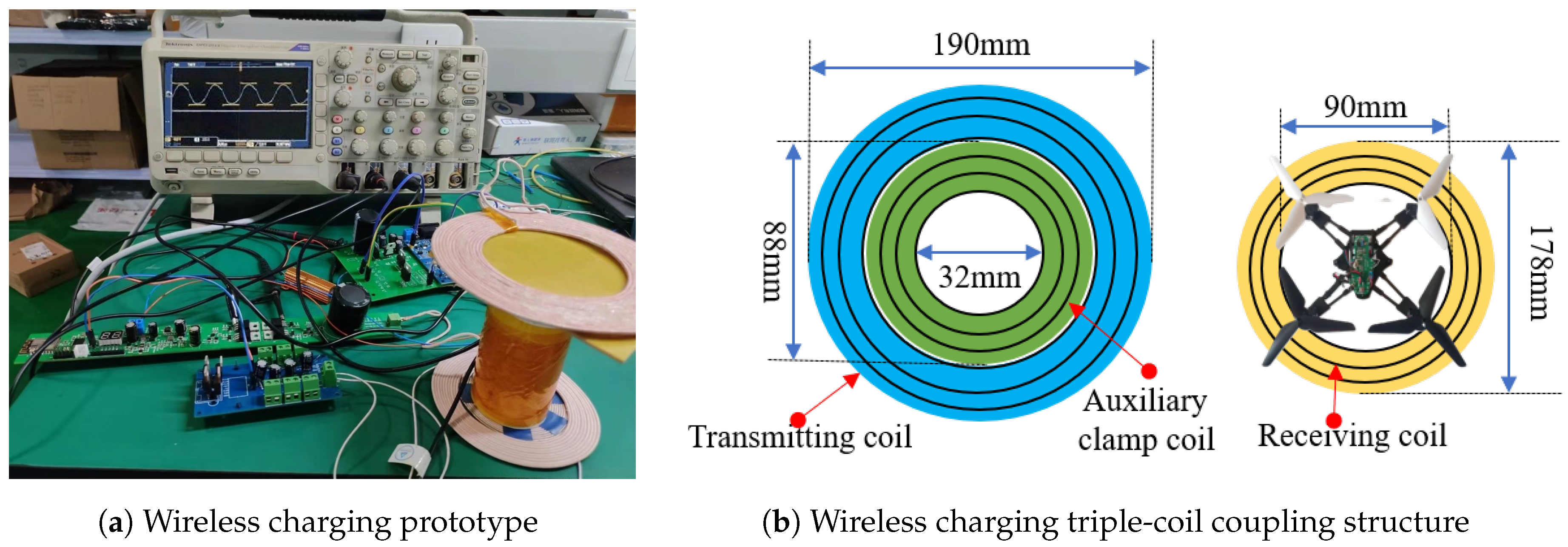
3.1. UAV Wireless Charging Platform Design
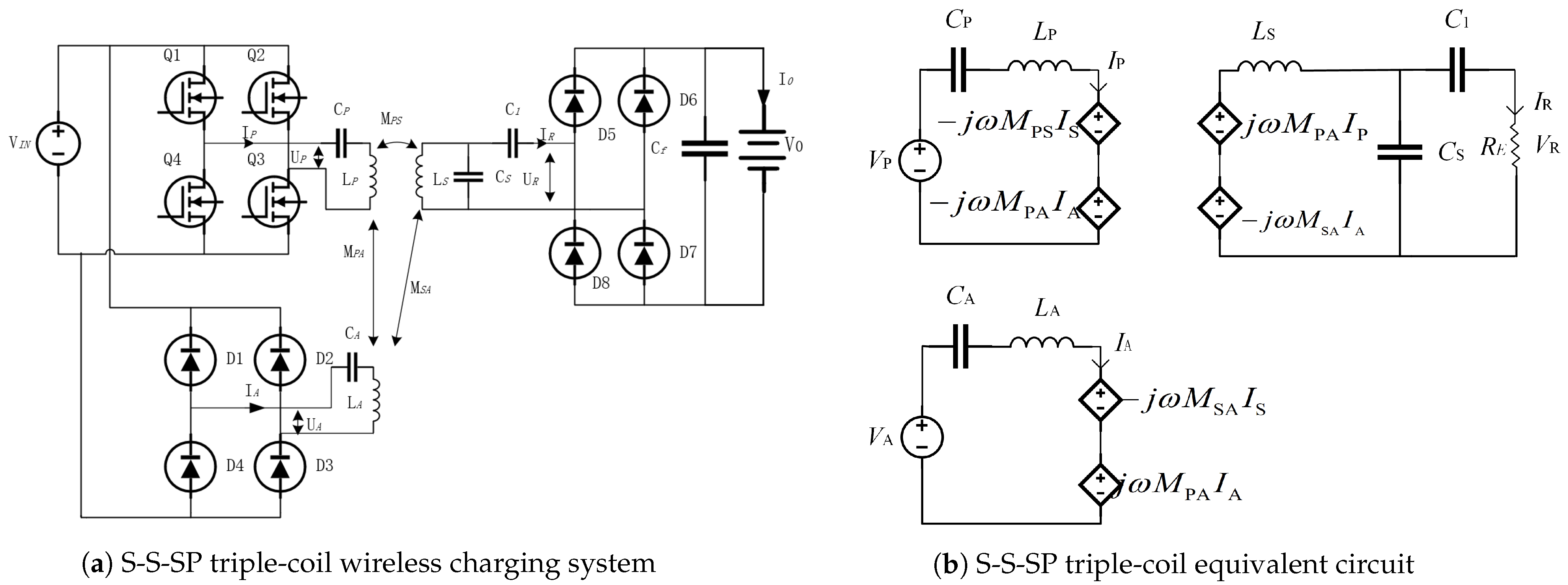
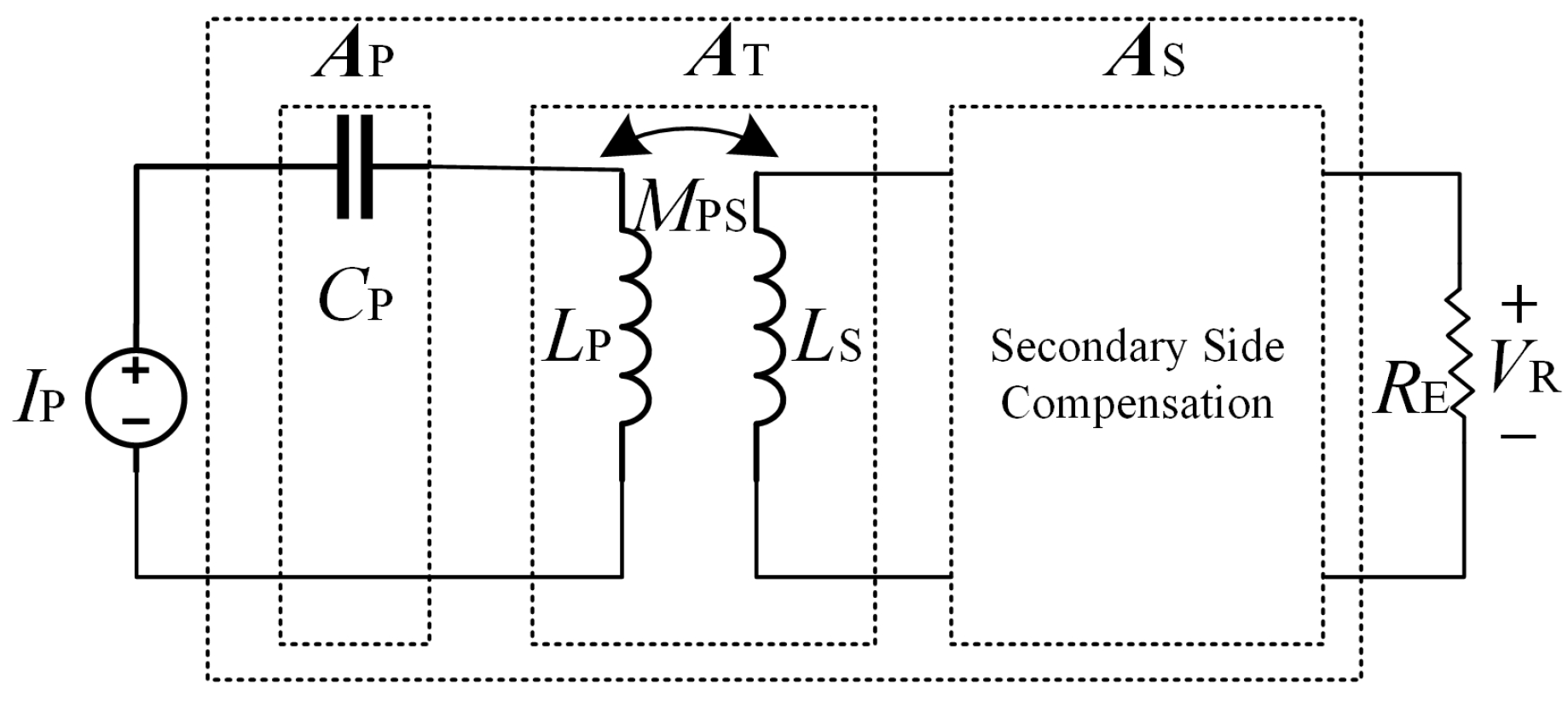
3.1.1. Derivation of the Triple-Coil S-S-SP Theory
3.1.2. Analysis of the S-S-SP Topology Wireless Charging State
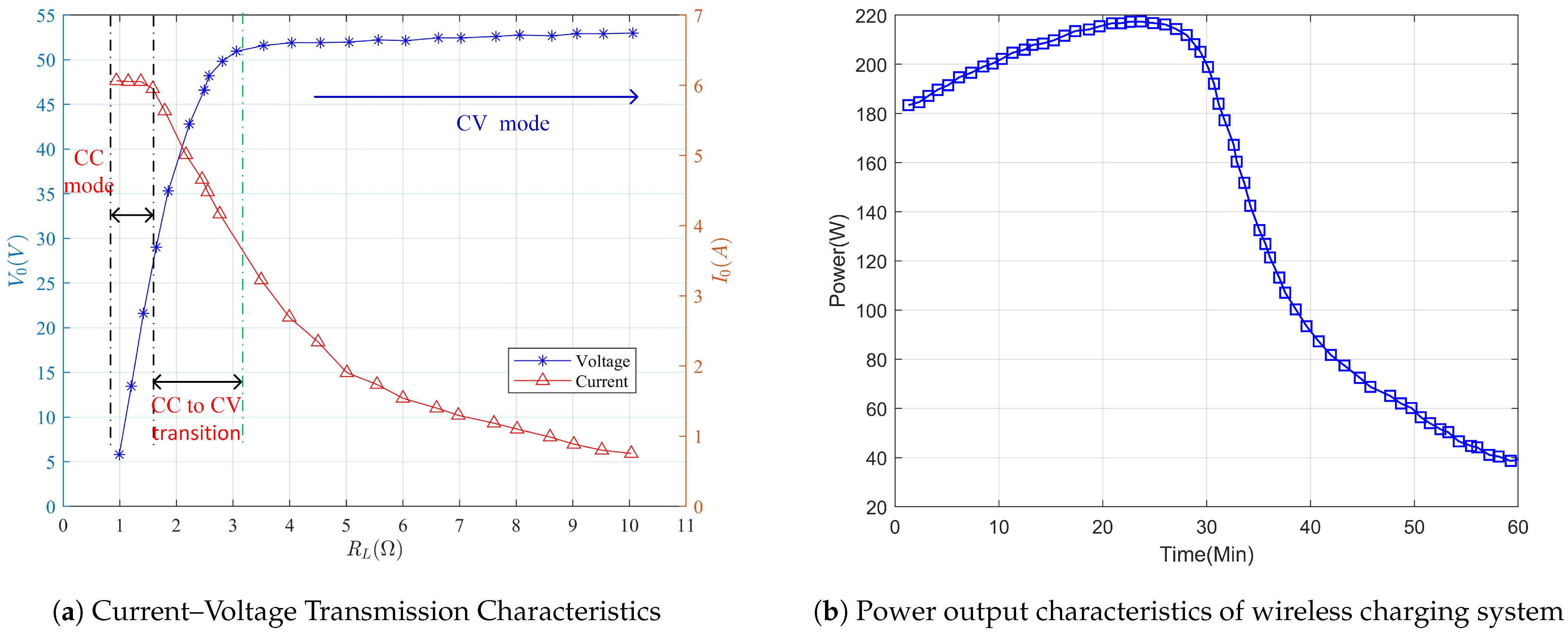
Constant Current State Analysis
Constant Current to Constant Voltage Intermediate State
Constant Voltage State Analysis
- At the end of the CC to CV intermediate transition state, when the equivalent resistance of the battery increases to , the rectifier bridge in the auxiliary clamp coil reaches full conduction. The wireless charging system changes to the CV state. Due to the auxiliary clamp coil just conducting, in the auxiliary loop, current can be approximated as zero at this moment, and the current value of the battery . At this point, from bringing Equation (21) into Equation (15), it can be derived that the battery load voltage at the initial stage of CV is
- After the battery charging has continued for some time, the value of in the auxiliary loop gradually rises, and the battery load current in the secondary loop gradually decreases. When the equivalent internal resistance inside the battery is much larger than , is close to zero at this moment. In the wireless charging system, is in phase with , and is in phase with . However, there is a difference of between and , so the difference between and is . From Equation (15), by substituting the phase relationship between and , we obtain the value of its voltage at the end of the CV output as follows
3.2. UAV Trajectory Analysis
4. Analysis of Road Vehicle Recognition and Multi-Target Tracking Algorithms
4.1. Traffic Flow Collaborative Detection Method Switching Analysis
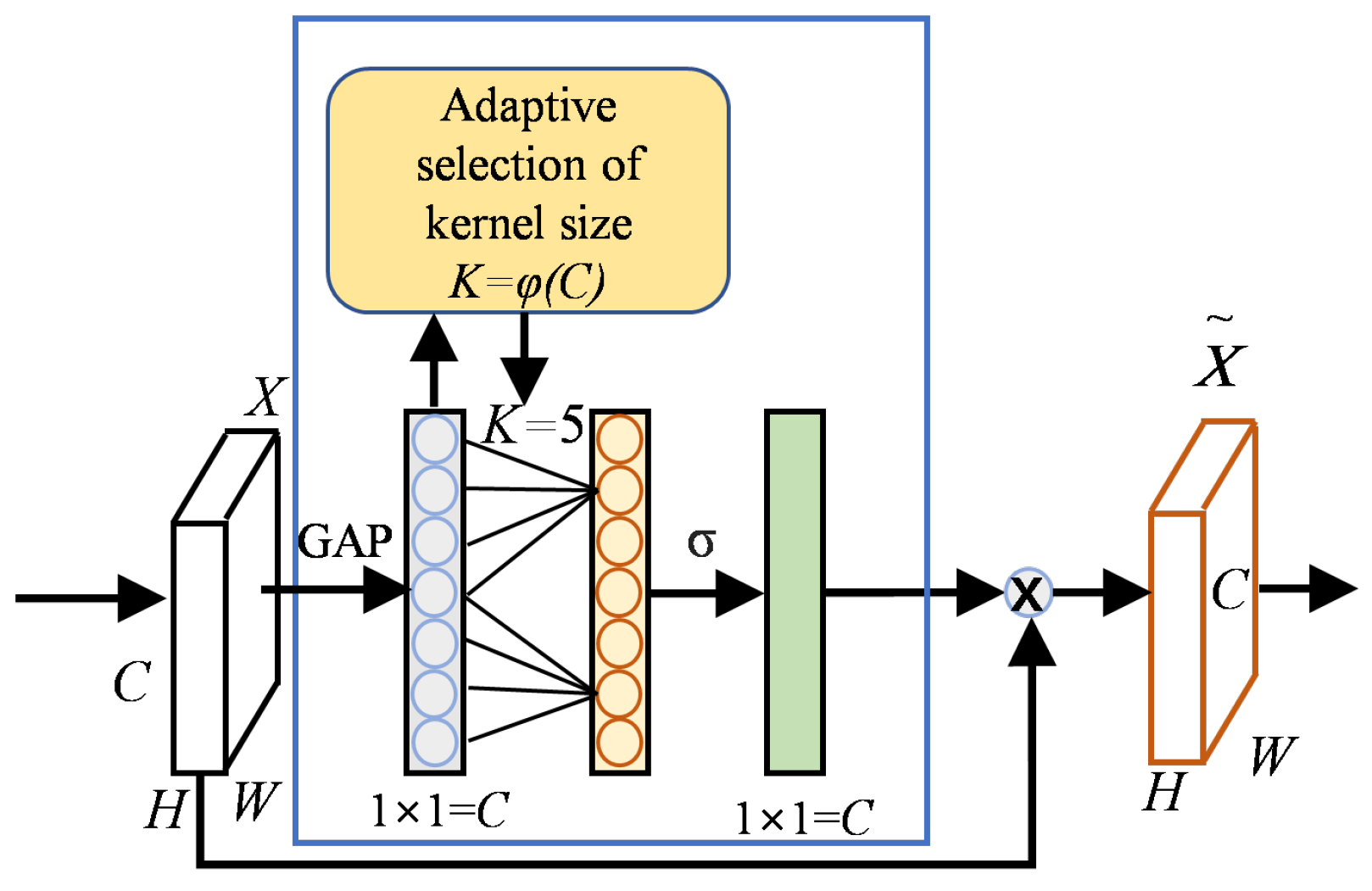
4.2. YOLOv8 Improved Algorithm with ByteTrack Tracking Algorithm
- For the high-scoring frame, the Intersections over Union (IoUs) of the high-scoring frame and the predicted frame are calculated, and the IoUs are matched using the Hungarian algorithm to obtain three results: the matched trajectory with the high-scoring frame, the unsuccessfully matched trajectory, and the unsuccessfully matched high-scoring frame. The boxes in the tracked trajectory are updated to high-score detection boxes after successful matching.
- Calculating the IoUs of the low-scoring frames and the predicted frames that were not matched in the previous step is for low-scoring frames. The Hungarian algorithm is used to match the IoUs to obtain three results: matched trajectories with low-scoring frames, unsuccessfully matched trajectories, and unsuccessfully matched low-scoring frames. After successful matching, the box in the tracked trajectory is updated to the detected box.
- The unmatched high-score detection box matches the trajectory whose status is inactive, obtaining three results: matched trajectory, unmatched detection box, and matched trajectory.
- Update the status for the matched trajectory and mark it as deleted for the unmatched trajectory. For an unmatched detection box, the confidence is greater than the threshold +0.1 and creates a new tracking trajectory, while it is discarded if less than that.
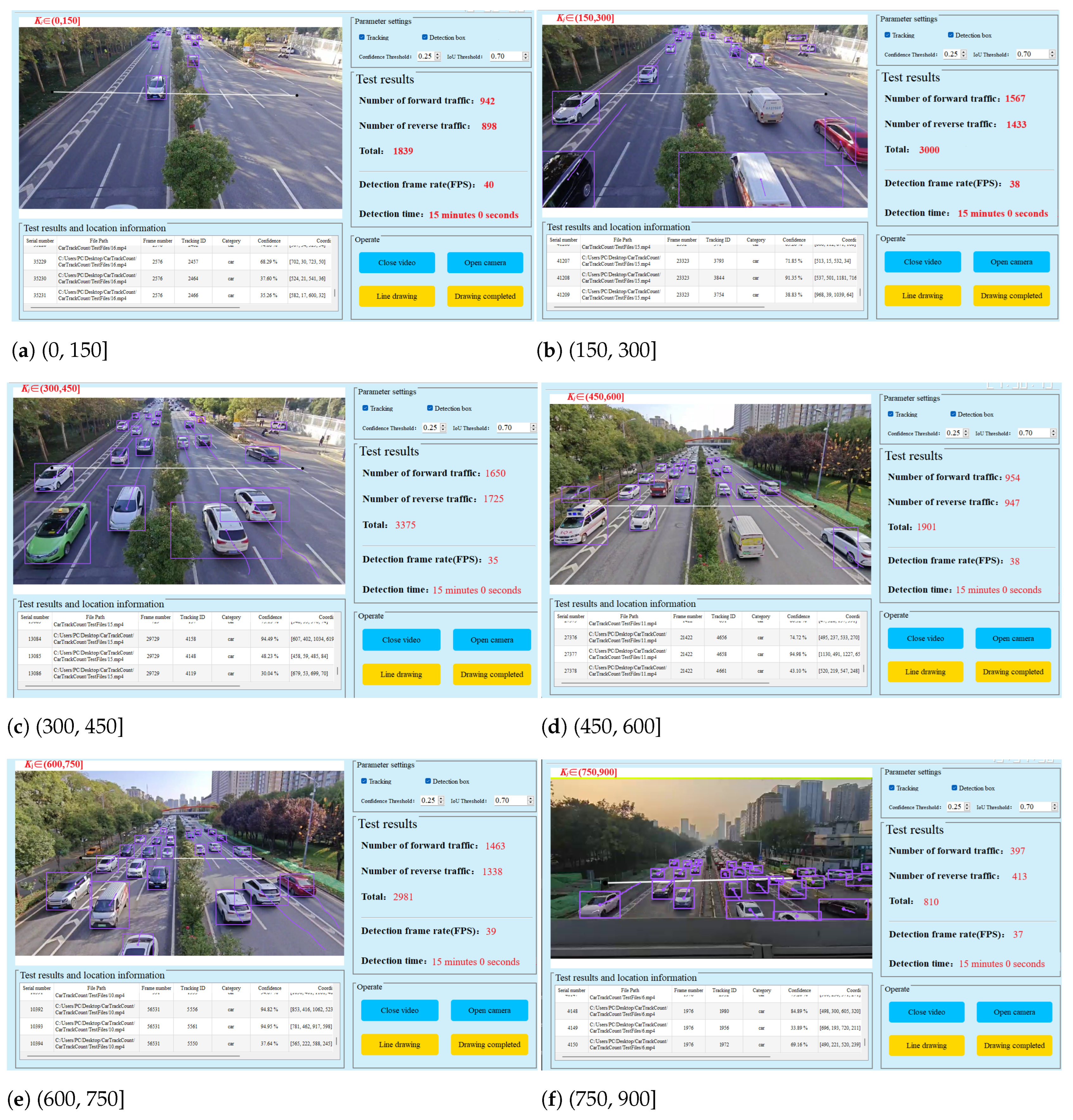
5. Simulation Design and Results Analysis
5.1. Parameter Settings
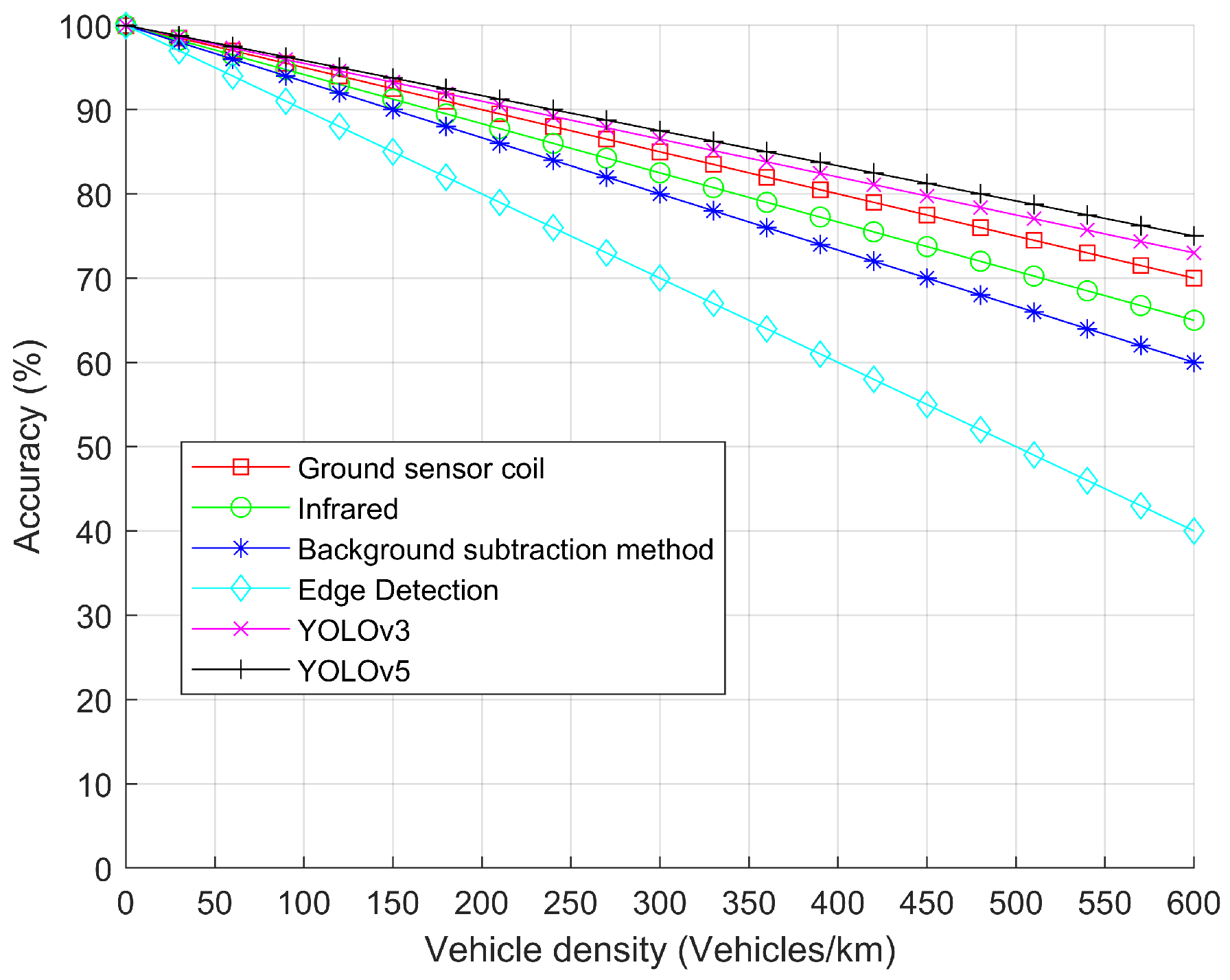
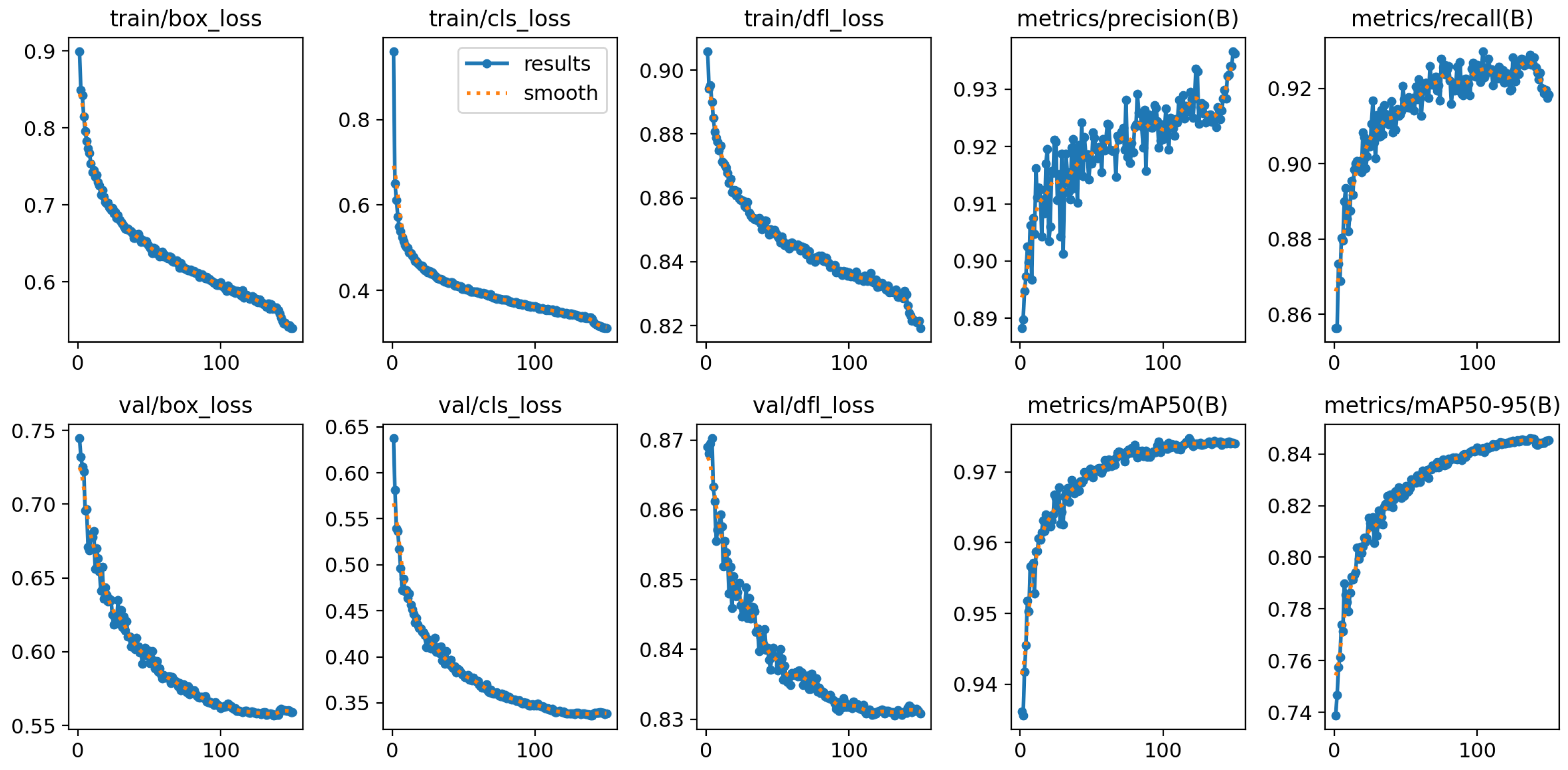
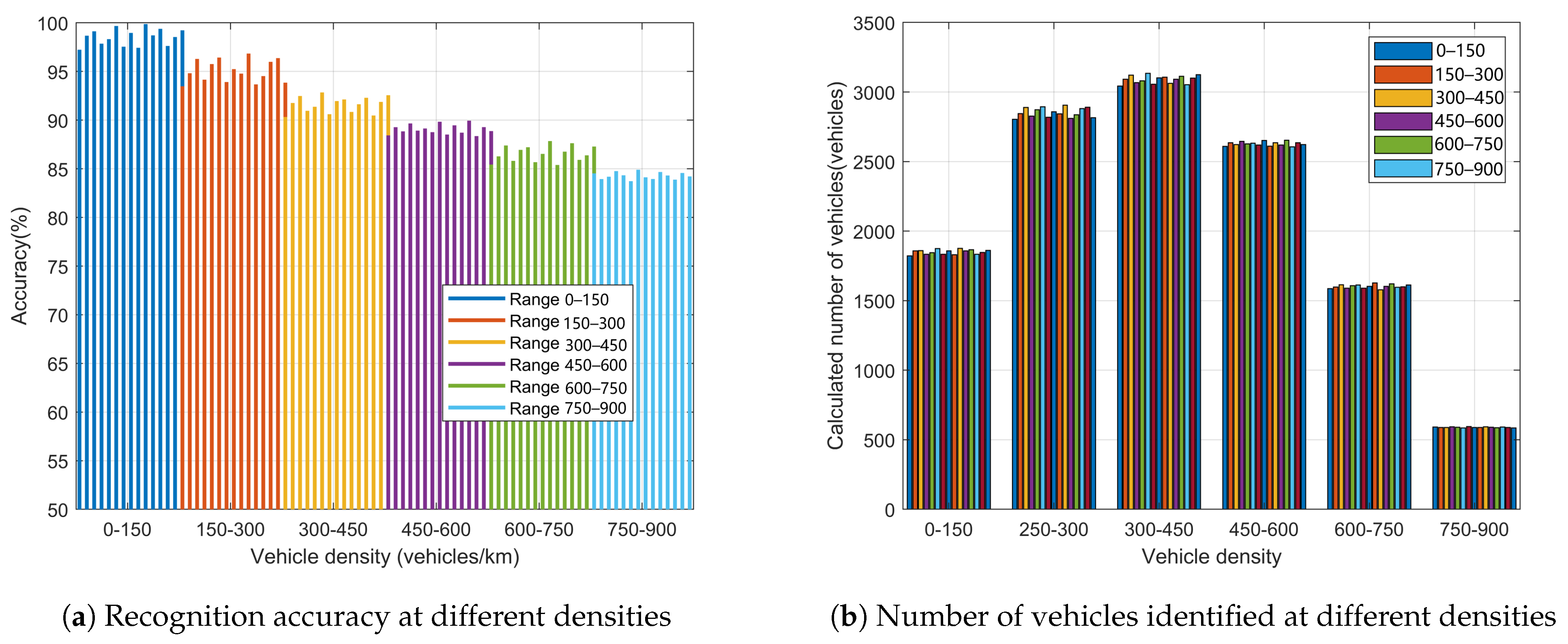
5.2. Validation Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, H.; Li, W.l.; Niu, M.; Miah, M.S.; Gao, T.; Wang, H.f. A Long-term Vehicle Tracking Algorithm of Correlation Filter Optimized by Swarm Intelligence Tracking Framework. IEEE Trans. Geosci. Remote. Sens. 2024, 62, 1002216. [Google Scholar] [CrossRef]
- Huang, H.; Wen, X.; Niu, M.; Miah, M.S.; Gao, T.; Wang, H. Multi-UAVs assisted path planning method for terrain-oriented air-ground collaborative vehicular network architecture. IEEE Trans. Intell. Veh. 2024; early access. [Google Scholar]
- Yong, H.; Pei, G.; Qinhua, W.; Wenhui, W. Research on image processing and pattern recognition method of rolling bearing cage defects. Acta Instrumenta Sin. 2019, 40, 162–169. [Google Scholar]
- Sujit, P.; Ghose, D. Search using multiple UAVs with flight time constraints. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 491–509. [Google Scholar] [CrossRef]
- Sarunic, P.; Evans, R. Hierarchical model predictive control of UAVs performing multitarget-multisensor tracking. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2253–2268. [Google Scholar] [CrossRef]
- Zhu, J.; Sun, K.; Jia, S.; Li, Q.; Hou, X.; Lin, W.; Liu, B.; Qiu, G. Urban traffic density estimation based on ultrahigh-resolution UAV video and deep neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 4968–4981. [Google Scholar] [CrossRef]
- Brkić, I.; Miler, M.; Ševrović, M.; Medak, D. An analytical framework for accurate traffic flow parameter calculation from UAV aerial videos. Remote Sens. 2020, 12, 3844. [Google Scholar] [CrossRef]
- Song, H.; Liang, H.; Li, H.; Dai, Z.; Yun, X. Vision-based vehicle detection and counting system using deep learning in highway scenes. Eur. Transp. Res. Rev. 2019, 11, 51. [Google Scholar] [CrossRef]
- Rafique, A.A.; Al-Rasheed, A.; Ksibi, A.; Ayadi, M.; Jalal, A.; Alnowaiser, K.; Meshref, H.; Shorfuzzaman, M.; Gochoo, M.; Park, J. Smart traffic monitoring through pyramid pooling vehicle detection and filter-based tracking on aerial images. IEEE Access 2023, 11, 2993–3007. [Google Scholar] [CrossRef]
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177. [Google Scholar] [CrossRef]
- Ahmadian, N.; Lim, G.J.; Torabbeigi, M.; Kim, S.J. Smart border patrol using drones and wireless charging system under budget limitation. Comput. Ind. Eng. 2022, 164, 107891. [Google Scholar] [CrossRef]
- Bin Junaid, A.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Ağçal, A.; Doğan, T.H. A Novel Folding Wireless Charging Station Design for Drones. Drones 2024, 8, 289. [Google Scholar] [CrossRef]
- Wang, H.; Chau, K.; Lee, C.H.; Cao, L.; Lam, W.H. Design, analysis, and implementation of wireless shaded-pole induction motors. IEEE Trans. Ind. Electron. 2020, 68, 6493–6503. [Google Scholar] [CrossRef]
- Xue, Z.; Niu, S.; Li, X. A Simplified Multivector-Based Model Predictive Current Control for PMSM With Enhanced Performance. IEEE Trans. Transp. Electrif. 2023, 9, 4032–4044. [Google Scholar] [CrossRef]
- Mahesh, A.; Chokkalingam, B.; Mihet-Popa, L. Inductive wireless power transfer charging for electric vehicles–a review. IEEE Access 2021, 9, 137667–137713. [Google Scholar] [CrossRef]
- Huang, Z.; Lam, C.S.; Mak, P.I.; da Silva Martins, R.P.; Wong, S.C.; Chi, K.T. A single-stage inductive-power-transfer converter for constant-power and maximum-efficiency battery charging. IEEE Trans. Power Electron. 2020, 35, 8973–8984. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, G.; Yu, J.; Qu, X. A novel clamp coil assisted IPT battery charger with inherent CC-to-CV transition capability. IEEE Trans. Power Electron. 2021, 36, 8607–8611. [Google Scholar] [CrossRef]
- Zhendong, H.; Yaonan, W.; Jie, L.; Feng, Y. High speed rail surface defect image segmentation based on background difference. Acta Instrumenta Sin. 2016, 37, 640–649. [Google Scholar]
- Tian, Y.; Liu, S.; Tan, Q. Application of Detecting Part’s Size Online Based on Machine Vision. Energy Procedia 2012, 16, 1948–1956. [Google Scholar]
- Dong, X.; Yan, S.; Duan, C. A lightweight vehicles detection network model based on YOLOv5. Eng. Appl. Artif. Intell. 2022, 113, 104914. [Google Scholar] [CrossRef]
- Li, X.; Yin, P.; Qu, Y.; Duan, C. Research on Multi-Object Tracking Algorithm for Thyroid Nodules Based on ByteTrack. In Proceedings of the 2024 IEEE 3rd International Conference on Electrical Engineering, Big Data and Algorithms (EEBDA), Changchun, China, 27–29 February 2024; pp. 1589–1592. [Google Scholar]
- Zhang, Y.; Shen, Z.; Pan, W.; Wang, H.; Wu, Y.; Mao, X. Constant current and constant voltage charging of wireless power transfer system based on three-coil structure. IEEE Trans. Ind. Electron. 2022, 70, 1066–1070. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| mm | μH |
| mm | μH |
| mm | μH |
| μH | |
| μH | |
| μH | |
| nF | nF |
| nF | nF |
| kHz |
| Battery capacity | 52 V/5935 mAh |
| Safety range of batteries | SoC ∈ (0.2, 0.9) |
| Equipment weight | 1.6 kg |
| Length of UAV charging time | 80 min |
| Length of UAV operating time | 35 min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, H.; Niu, M.; Wang, B.; Yan, K.; Li, Y.; Pang, H. Fixed/Mobile Collaborative Traffic Flow Detection Study Based on Wireless Charging of UAVs. Drones 2025, 9, 117. https://doi.org/10.3390/drones9020117
Wu H, Niu M, Wang B, Yan K, Li Y, Pang H. Fixed/Mobile Collaborative Traffic Flow Detection Study Based on Wireless Charging of UAVs. Drones. 2025; 9(2):117. https://doi.org/10.3390/drones9020117
Chicago/Turabian StyleWu, Hao, Mingbo Niu, Biao Wang, Kai Yan, Yuxuan Li, and Hanyu Pang. 2025. "Fixed/Mobile Collaborative Traffic Flow Detection Study Based on Wireless Charging of UAVs" Drones 9, no. 2: 117. https://doi.org/10.3390/drones9020117
APA StyleWu, H., Niu, M., Wang, B., Yan, K., Li, Y., & Pang, H. (2025). Fixed/Mobile Collaborative Traffic Flow Detection Study Based on Wireless Charging of UAVs. Drones, 9(2), 117. https://doi.org/10.3390/drones9020117