
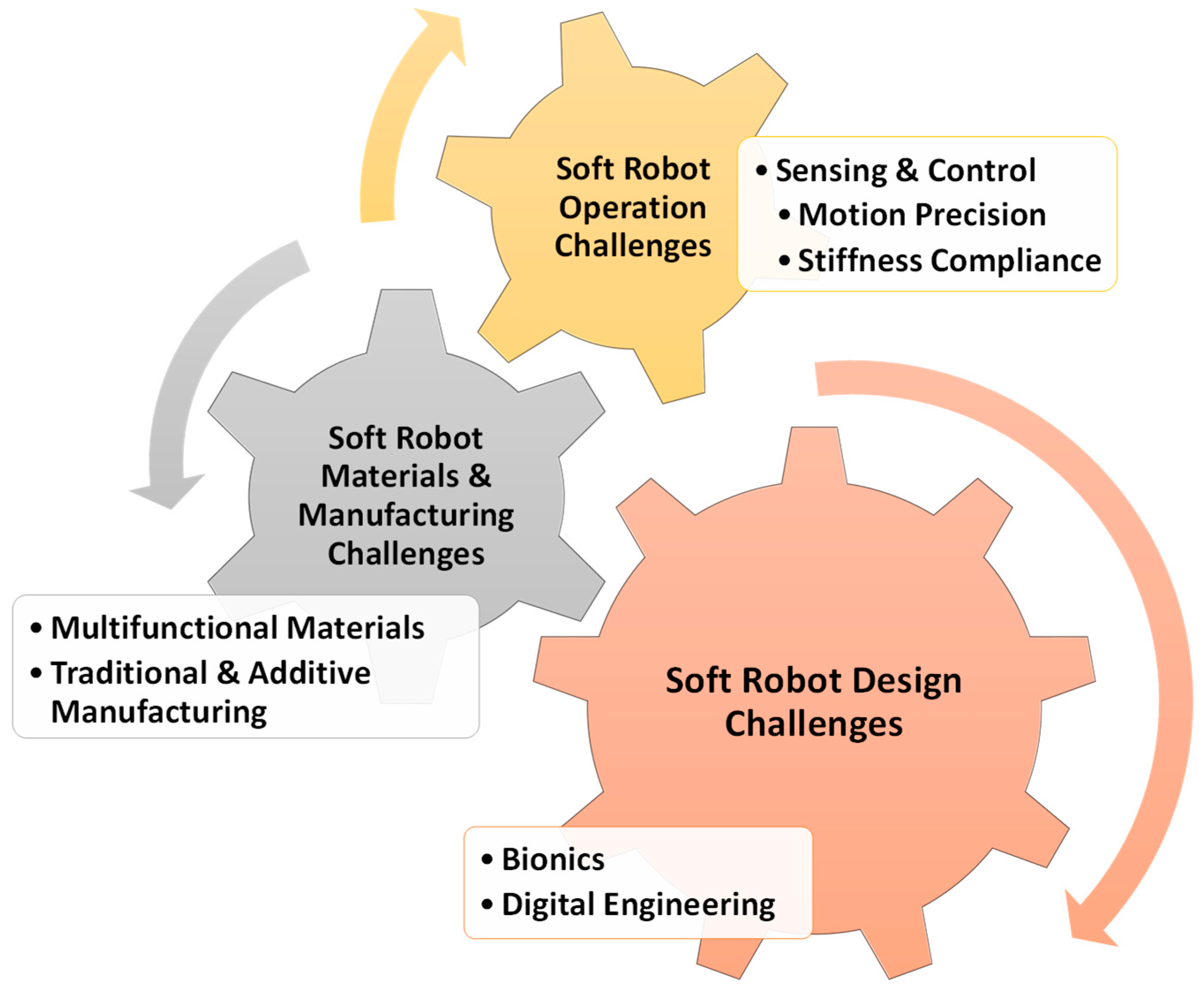
Soft Robot Design, Manufacturing, and Operation Challenges: A Review



Abstract
1. Introduction
2. Methodology
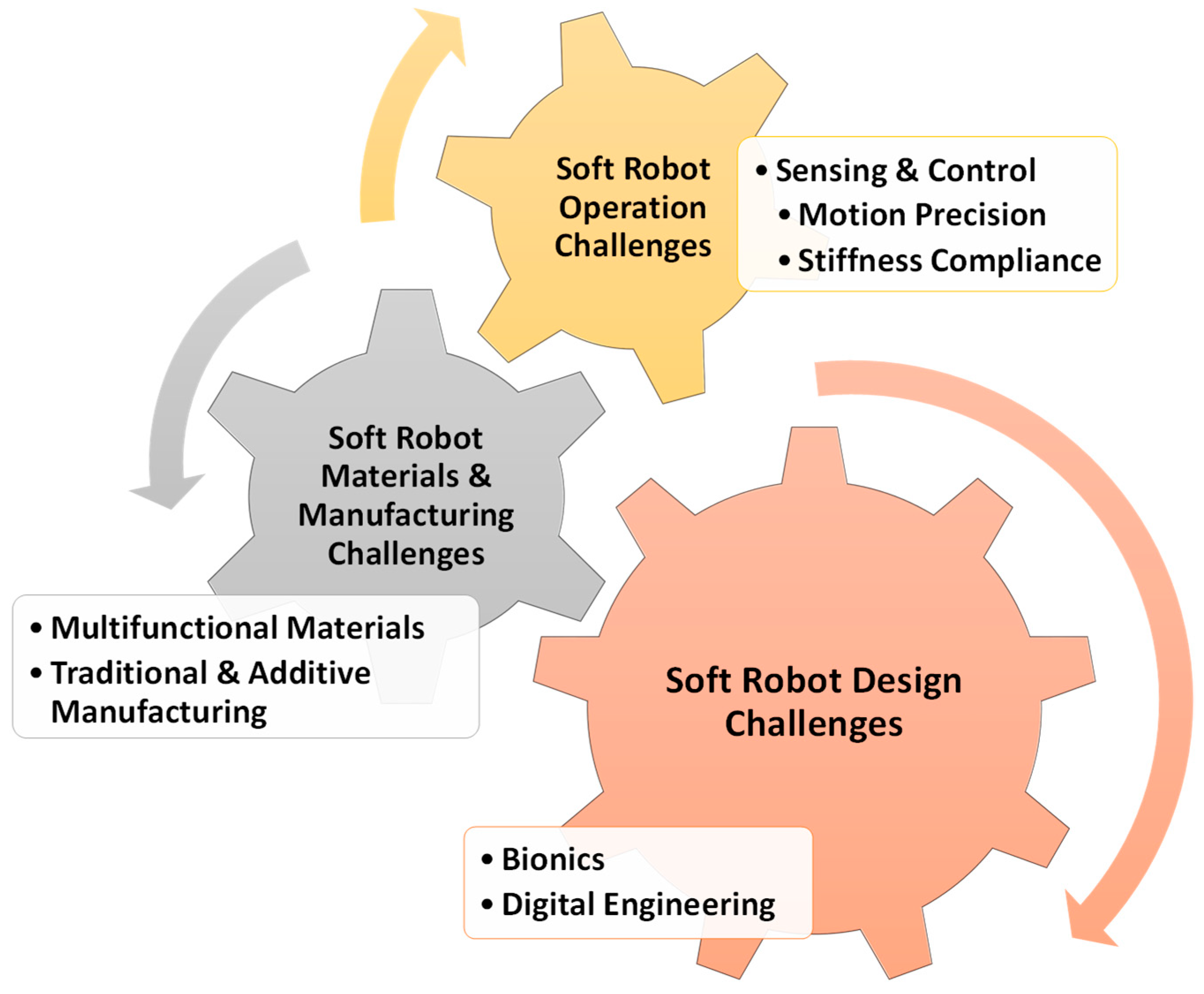
3. Soft Robot Design Challenges
3.1. Advancements
3.1.1. Bionics
3.1.2. Digital Engineering
3.2. Opportunities
4. Soft Robot Materials and Manufacturing Challenges
4.1. Advancements
4.2. Opportunities
5. Soft Robot Operation Challenges
5.1. Sensing and Control of Motion
5.1.1. Advancements
5.1.2. Opportunities
5.2. Sensing and Control of Stiffness
5.2.1. Advancements
5.2.2. Opportunities
6. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Taesi, C.; Aggogeri, F.; Pellegrini, N. COBOT Applications—Recent Advances and Challenges. Robotics 2023, 12, 79. [Google Scholar]
- Le Signor, T.; Dupré, N.; Didden, J.; Lomakin, E.; Close, G. Mass-Manufacturable 3D Magnetic Force Sensor for Robotic Grasping and Slip Detection. Sensors 2023, 23, 3031. [Google Scholar]
- Flavia, M.; Lucia, D.; Antonia, L.; Luigi, P.; Marco, T.; Manuela, G. The simultaneous assessment of time and motion response during dual tasks. Sensors 2023, 23, 5309. [Google Scholar]
- Dang, T.-V.; Bui, N.-T. Obstacle Avoidance Strategy for Mobile Robot based on Monocular Camera. Electronics 2023, 12, 1932. [Google Scholar]
- Li, P.; Liu, X. Common sensors in industrial robots: A review. J. Phys. Conf. Ser. 2019, 1267, 012036. [Google Scholar]
- Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic soft robots: Challenges and benefits. Actuators 2022, 11, 92. [Google Scholar]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar]
- Liu, J.; Li, P.; Zuo, S. Actuation and design innovations in earthworm-inspired soft robots: A review. Front. Bioeng. Biotechnol. 2023, 11, 1088105. [Google Scholar]
- Boldsaikhan, E. Measuring and Estimating Rotary Joint Axes of an Articulated Robot. IEEE Trans. Instrum. Meas. 2020, 69, 8279–8287. [Google Scholar] [CrossRef]
- Ambaye, G.; Boldsaikhan, E.; Krishnan, K. Robot arm damage detection using vibration data and deep learning. Neural Comput. Appl. 2024, 36, 1727–1739. [Google Scholar]
- Lakshmi Balasubramaniam, G.; Boldsaikhan, E.; Fukada, S.; Fujimoto, M.; Kamimuki, K. Effects of Refill Friction Stir Spot Weld Spacing and Edge Margin on Mechanical Properties of Multi-Spot-Welded Panels. J. Manuf. Mater. Process. 2020, 4, 55. [Google Scholar]
- Lakshmi Balasubramaniam, G.; Boldsaikhan, E.; Joseph Rosario, G.F.; Ravichandran, S.P.; Fukada, S.; Fujimoto, M.; Kamimuki, K. Mechanical Properties and Failure Mechanisms of Refill Friction Stir Spot Welds. J. Manuf. Mate. Process. 2021, 5, 118. [Google Scholar]
- Wang, Z.; Zhang, R.; Keogh, P. Real-Time Laser Tracker Compensation of Robotic Drilling and Machining. J. Manuf. Mate. Process. 2020, 4, 79. [Google Scholar]
- Yang, Y.; Jiao, P. Nanomaterials and nanotechnology for biomedical soft robots. Mater. Today Adv. 2023, 17, 100338. [Google Scholar]
- Garcia, L.; Kerns, G.; O’Reilley, K.; Okesanjo, O.; Lozano, J.; Narendran, J.; Broeking, C.; Ma, X.; Thompson, H.; Njapa Njeuha, P. The role of soft robotic micromachines in the future of medical devices and personalized medicine. Micromachines 2021, 13, 28. [Google Scholar]
- Abad, S.-A.; Arezzo, A.; Homer-Vanniasinkam, S.; Wurdemann, H.A. Soft robotic systems for endoscopic interventions. In Endorobotics; Academic Press: Cambridge, MA, USA, 2022; pp. 61–93. [Google Scholar]
- Runciman, M.; Darzi, A.; Mylonas, G.P. Soft robotics in minimally invasive surgery. Soft Robot. 2019, 6, 423–443. [Google Scholar]
- Xue, E.; Tian, B.; Wu, Y.; Liu, Q.; Guo, P.; Zheng, K.; Liang, J.; Wu, W. Photothermal and Humidity Stimulus-Responsive Self-Sensing Soft Actuators for Smart Packaging. ACS Appl. Polym. Mater. 2023, 5, 4525–4535. [Google Scholar]
- Navas, E.; Dworak, V.; Weltzien, C.; Fernández, R.; Shokrian Zeini, M.; Käthner, J.; Shamshiri, R. An approach to the automation of blueberry harvesting using soft robotics. In 43. GIL-Jahrestagung, Resiliente Agri-Food-Systeme; Gesellschaft für Informatik e.V.: Bonn, Germany, 2023. [Google Scholar]
- Wang, X.; Kang, H.; Zhou, H.; Au, W.; Wang, M.Y.; Chen, C. Development and evaluation of a robust soft robotic gripper for apple harvesting. Comput. Electron. Agric. 2023, 204, 107552. [Google Scholar]
- Kim, M.-J.; Kim, B.-G.; Koh, J.-S.; Yi, H. Flexural biomimetic responsive building façade using a hybrid soft robot actuator and fabric membrane. Autom. Constr. 2023, 145, 104660. [Google Scholar]
- Wan, Z.; Sun, Y.; Qin, Y.; Skorina, E.H.; Gasoto, R.; Luo, M.; Fu, J.; Onal, C.D. Design, analysis, and real-time simulation of a 3D soft robotic snake. Soft Robot. 2023, 10, 258–268. [Google Scholar]
- Zhang, Y.; Li, P.; Quan, J.; Li, L.; Zhang, G.; Zhou, D. Progress, challenges, and prospects of soft robotics for space applications. Adv. Intell. Syst. 2023, 5, 2200071. [Google Scholar]
- Feng, R.; Zhang, Y.; Liu, J.; Zhang, Y.; Li, J.; Baoyin, H. Soft robotic perspective and concept for planetary small body exploration. Soft Robot. 2022, 9, 889–899. [Google Scholar]
- Even, S.; Ozkan-Aydin, Y. Locomotion and Obstacle Avoidance of a Worm-like Soft Robot. arXiv 2023, arXiv:2304.04301. [Google Scholar]
- Dinakaran, V.P.; Balasubramaniyan, M.P.; Muthusamy, S.; Panchal, H. Performa of SCARA based intelligent 3 axis robotic soft gripper for enhanced material handling. Adv. Eng. Softw. 2023, 176, 103366. [Google Scholar]
- Gu, H.; Möckli, M.; Ehmke, C.; Kim, M.; Wieland, M.; Moser, S.; Bechinger, C.; Boehler, Q.; Nelson, B.J. Self-folding soft-robotic chains with reconfigurable shapes and functionalities. Nat. Commun. 2023, 14, 1263. [Google Scholar]
- Joshi, S.; Paik, J. Pneumatic supply system parameter optimization for soft actuators. Soft Robot. 2021, 8, 152–163. [Google Scholar]
- Na, H.; Kang, Y.-W.; Park, C.S.; Jung, S.; Kim, H.-Y.; Sun, J.-Y. Hydrogel-based strong and fast actuators by electroosmotic turgor pressure. Science 2022, 376, 301–307. [Google Scholar]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M. Soft pneumatic actuators: A review of design, fabrication, modeling, sensing, control and applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar]
- Tang, D.; Zhang, C.; Sun, H.; Dai, H.; Xie, J.; Fu, J.; Zhao, P. Origami-inspired magnetic-driven soft actuators with programmable designs and multiple applications. Nano Energy 2021, 89, 106424. [Google Scholar]
- Nandan, S.; Sharma, D.; Sharma, A.K. Viscoelastic effects on the nonlinear oscillations of hard-magnetic soft actuators. J. Appl. Mech. 2023, 90, 061001. [Google Scholar]
- Xing, S.-T.; Wang, P.-P.; Liu, S.-Q.; Xu, Y.-H.; Zheng, R.-M.; Deng, Z.-F.; Peng, Z.-F.; Li, J.-Z.; Wu, Y.-Y.; Liu, L. A shape-memory soft actuator integrated with reversible electric/moisture actuating and strain sensing. Compos. Sci. Technol. 2020, 193, 108133. [Google Scholar]
- Chin, L.; Yuen, M.C.; Lipton, J.; Trueba, L.H.; Kramer-Bottiglio, R.; Rus, D. A simple electric soft robotic gripper with high-deformation haptic feedback. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Bernat, J.; Gajewski, P.; Kołota, J.; Marcinkowska, A. Review of Soft Actuators Controlled with Electrical Stimuli: IPMC, DEAP, and MRE. Appl. Sci. 2023, 13, 1651. [Google Scholar]
- Das, T.K.; Shirinzadeh, B.; Al-Jodah, A.; Ghafarian, M.; Pinskier, J. A novel compliant piezoelectric actuated symmetric microgripper for the parasitic motion compensation. Mech. Mach. Theory 2021, 155, 104069. [Google Scholar]
- Jiang, Z.C.; Xiao, Y.Y.; Zhao, Y. Shining light on liquid crystal polymer networks: Preparing, reconfiguring, and driving soft actuators. Adv. Opt. Mater. 2019, 7, 1900262. [Google Scholar]
- Pang, X.; Lv, J.a.; Zhu, C.; Qin, L.; Yu, Y. Photodeformable azobenzene-containing liquid crystal polymers and soft actuators. Adv. Mater. 2019, 31, 1904224. [Google Scholar]
- Da Cunha, M.P.; Debije, M.G.; Schenning, A.P. Bioinspired light-driven soft robots based on liquid crystal polymers. Chem. Soc. Rev. 2020, 49, 6568–6578. [Google Scholar]
- Liu, Y.Q.; Chen, Z.D.; Han, D.D.; Mao, J.W.; Ma, J.N.; Zhang, Y.L.; Sun, H.B. Bioinspired soft robots based on the moisture-responsive graphene oxide. Adv. Sci. 2021, 8, 2002464. [Google Scholar]
- Wang, Y.; Miao, M. Helical shape linen artificial muscles responsive to water. Smart Mater. Struct. 2021, 30, 075031. [Google Scholar]
- Wu, J.; Yang, M.; Sheng, N.; Peng, Y.; Sun, F.; Han, C. Moisture-Sensitive Response and High-Reliable Cycle Recovery Effectiveness of Yarn-Based Actuators with Tether-Free, Multi-Hierarchical Hybrid Construction. ACS Appl. Mater. Interfaces 2022, 14, 53274–53284. [Google Scholar]
- Zhou, H.; Cao, S.; Zhang, S.; Li, F.; Ma, N. Design of a fuel explosion-based chameleon-like soft robot aided by the comprehensive dynamic model. Cyborg Bionic Syst. 2023, 4, 0010. [Google Scholar]
- Yang, Y.; He, Z.; Lin, G.; Wang, H.; Jiao, P. Large deformation mechanics of the thrust performances generated by combustion-enabled soft actuators. Int. J. Mech. Sci. 2022, 229, 107513. [Google Scholar]
- Yang, Y.; Hou, B.; Chen, J.; Wang, H.; Jiao, P.; He, Z. High-speed soft actuators based on combustion-enabled transient driving method (TDM). Extrem. Mech. Lett. 2020, 37, 100731. [Google Scholar]
- Son, H.; Park, Y.; Na, Y.; Yoon, C. 4D multiscale origami soft robots: A review. Polymers 2022, 14, 4235. [Google Scholar]
- Liu, K.; Chen, W.; Yang, W.; Jiao, Z.; Yu, Y. Review of the research progress in soft robots. Appl. Sci. 2022, 13, 120. [Google Scholar]
- Chen, Y.; Xia, Z.; Zhao, Q. Optimal design of soft pneumatic bending actuators subjected to design-dependent pressure loads. IEEE/ASME Trans. Mechatron. 2019, 24, 2873–2884. [Google Scholar]
- Tawk, C.; Alici, G. Finite element modeling in the design process of 3D printed pneumatic soft actuators and sensors. Robotics 2020, 9, 52. [Google Scholar]
- Ćurković, P.; Jambrečić, A. Improving structural design of soft actuators using finite element method analysis. Interdiscip. Descr. Complex Syst. INDECS 2020, 18, 490–500. [Google Scholar]
- Xu, J.; Xie, Z.; Yue, H.; Lu, Y.; Yang, F. A triboelectric multifunctional sensor based on the controlled buckling structure for motion monitoring and bionic tactile of soft robots. Nano Energy 2022, 104, 107845. [Google Scholar]
- Eroğlu, M.; Şam Parmak, E.D. A simple manufacturing process of the miniaturised octopus-inspired underwater soft robotic grippers. J. Adhes. Sci. Technol. 2023, 37, 1163–1176. [Google Scholar]
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar]
- Roshanfar, M.; Sayadi, A.; Dargahi, J.; Hooshiar, A. Stiffness adaptation of a hybrid soft surgical robot for improved safety in interventional surgery. In Proceedings of the 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Sydney, Australia, 11–15 July 2022. [Google Scholar]
- Davarzani, S.; Ahmadi-Pajouh, M.A.; Ghafarirad, H. Design of sensing system for experimental modeling of soft actuator applied for finger rehabilitation. Robotica 2022, 40, 2091–2111. [Google Scholar]
- Zhou, H.; Tawk, C.; Alici, G. A 3D printed soft robotic hand with embedded soft sensors for direct transition between hand gestures and improved grasping quality and diversity. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 550–558. [Google Scholar]
- Low, J.H.; Goh, J.; Cheng, N.; Khin, P.; Han, Q.; Yeow, C.-H. A bidirectional 3D-printed soft pneumatic actuator and graphite-based flex sensor for versatile grasping. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Meder, F.; Babu, S.P.M.; Mazzolai, B. A plant tendril-like soft robot that grasps and anchors by exploiting its material arrangement. IEEE Robot. Autom. Lett. 2022, 7, 5191–5197. [Google Scholar]
- Wei, H.; Shan, Y.; Zhao, Y.; Qi, L.; Zhao, X. A soft robot with variable stiffness multidirectional grasping based on a folded plate mechanism and particle jamming. IEEE Trans. Robot. 2022, 38, 3821–3831. [Google Scholar]
- Zhou, J.; Chen, S.; Wang, Z. A soft-robotic gripper with enhanced object adaptation and grasping reliability. IEEE Robot. Autom. Lett. 2017, 2, 2287–2293. [Google Scholar]
- Wang, H.; Zhu, Z.; Jin, H.; Wei, R.; Bi, L.; Zhang, W. Magnetic soft robots: Design, actuation, and function. J. Alloys Compd. 2022, 922, 166219. [Google Scholar]
- Coulson, R.; Stabile, C.J.; Turner, K.T.; Majidi, C. Versatile soft robot gripper enabled by stiffness and adhesion tuning via thermoplastic composite. Soft Robot. 2022, 9, 189–200. [Google Scholar]
- Singh, K.; Gupta, S. Controlled actuation, adhesion, and stiffness in soft robots: A review. J. Intell. Robot. Syst. 2022, 106, 59. [Google Scholar]
- Whitesides, G.M. Soft robotics. Angew. Chem. Int. Ed. 2018, 57, 4258–4273. [Google Scholar]
- Zhao, Y.; Hua, M.; Yan, Y.; Wu, S.; Alsaid, Y.; He, X. Stimuli-responsive polymers for soft robotics. Annu. Rev. Control Robot. Auton. Syst. 2022, 5, 515–545. [Google Scholar]
- Zhan, S.; Guo, A.X.; Cao, S.C.; Liu, N. 3D printing soft matters and applications: A review. Int. J. Mol. Sci. 2022, 23, 3790. [Google Scholar]
- Farhan, M.; Hartstein, D.S.; Pieper, Y.; Behl, M.; Lendlein, A.; Neffe, A.T. Bio-Inspired Magnetically Controlled Reversibly Actuating Multimaterial Fibers. Polymers 2023, 15, 2233. [Google Scholar]
- Hu, F.; Kou, Z.; Sefene, E.M.; Mikolajczyk, T. An Origami Flexiball-Inspired Soft Robotic Jellyfish. J. Mar. Sci. Eng. 2023, 11, 714. [Google Scholar]
- Smith, G.L.; Tyler, J.B.; Lazarus, N.; Tsang, H.; Viornery, L.; Shultz, J.; Bergbreiter, S. Spider-Inspired, Fully 3D-Printed Micro-Hydraulics for Tiny, Soft Robotics. Adv. Funct. Mater. 2023, 33, 2207435. [Google Scholar]
- López-González, A.; Tejada, J.C.; López-Romero, J. Review and Proposal for a Classification System of Soft Robots Inspired by Animal Morphology. Biomimetics 2023, 8, 192. [Google Scholar]
- Zhang, W.; Li, R.; Yang, Q.; Fu, Y.; Kong, X. Impact Resistance of a Fiber Metal Laminate Skin Bio-Inspired Composite Sandwich Panel with a Rubber and Foam Dual Core. Materials 2023, 16, 453. [Google Scholar]
- Nepal, D.; Kang, S.; Adstedt, K.M.; Kanhaiya, K.; Bockstaller, M.R.; Brinson, L.C.; Buehler, M.J.; Coveney, P.V.; Dayal, K.; El-Awady, J.A. Hierarchically structured bioinspired nanocomposites. Nat. Mater. 2023, 22, 18–35. [Google Scholar]
- Poudel, S.; Arafat, M.Y.; Moh, S. Bio-Inspired Optimization-Based Path Planning Algorithms in Unmanned Aerial Vehicles: A Survey. Sensors 2023, 23, 3051. [Google Scholar]
- Husnain, G.; Anwar, S.; Sikander, G.; Ali, A.; Lim, S. A bio-inspired cluster optimization schema for efficient routing in vehicular ad hoc networks (VANETs). Energies 2023, 16, 1456. [Google Scholar]
- Sherif, A.; Haci, H. A Novel Bio-Inspired Energy Optimization for Two-Tier Wireless Communication Networks: A Grasshopper Optimization Algorithm (GOA)-Based Approach. Electronics 2023, 12, 1216. [Google Scholar]
- Du, T.; Sun, L.; Wan, J. A Worm-like Crawling Soft Robot with Pneumatic Actuators Based on Selective Laser Sintering of TPU Powder. Biomimetics 2022, 7, 205. [Google Scholar]
- Li, G.; Qiu, W.; Wen, H.; Wang, M.; Liu, F. Development of an Earthworm-Based Intestinal Soft Robot Equipped with a Gripper. Machines 2022, 10, 1057. [Google Scholar]
- Wang, C.; Puranam, V.R.; Misra, S.; Venkiteswaran, V.K. A snake-inspired multi-segmented magnetic soft robot towards medical applications. IEEE Robot. Autom. Lett. 2022, 7, 5795–5802. [Google Scholar]
- Lee, S.; Her, I.; Jung, W.; Hwang, Y. Snakeskin-Inspired 3D Printable Soft Robot Composed of Multi-Modular Vacuum-Powered Actuators. Actuators 2023, 12, 62. [Google Scholar]
- Rogóż, M.; Dradrach, K.; Xuan, C.; Wasylczyk, P. A millimeter-scale snail robot based on A light-powered liquid crystal elastomer continuous actuator. Macromol. Rapid Commun. 2019, 40, 1900279. [Google Scholar]
- Takeyama, J.; Ichikawa, A.; Hasegawa, A.; Kim, E.; Fukuda, T. A soft robot mimicking snail’s foot. In Proceedings of the 2018 International Symposium on Micro-NanoMechatronics and Human Science (MHS), Nagoya, Japan, 1–5 December 2018. [Google Scholar]
- Huang, H.; Feng, Y.; Yang, X.; Yang, L.; Shen, Y. An Insect-Inspired Terrains-Adaptive Soft Millirobot with Multimodal Locomotion and Transportation Capability. Micromachines 2022, 13, 1578. [Google Scholar]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar]
- Rozen-Levy, S.; Messner, W.; Trimmer, B.A. The design and development of branch bot: A branch-crawling, caterpillar-inspired, soft robot. Int. J. Robot. Res. 2021, 40, 24–36. [Google Scholar]
- Wu, S.; Hong, Y.; Zhao, Y.; Yin, J.; Zhu, Y. Caterpillar-inspired soft crawling robot with distributed programmable thermal actuation. Sci. Adv. 2023, 9, eadf8014. [Google Scholar]
- Calderón, A.A.; Ugalde, J.C.; Zagal, J.C.; Pérez-Arancibia, N.O. Design, fabrication and control of a multi-material-multi-actuator soft robot inspired by burrowing worms. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016. [Google Scholar]
- Das, R.; Babu, S.P.M.; Visentin, F.; Palagi, S.; Mazzolai, B. An earthworm-like modular soft robot for locomotion in multi-terrain environments. Sci. Rep. 2023, 13, 1571. [Google Scholar]
- Zhu, R.; Fan, D.; Wu, W.; He, C.; Xu, G.; Dai, J.S.; Wang, H. Soft Robots for Cluttered Environments Based on Origami Anisotropic Stiffness Structure (OASS) Inspired by Desert Iguana. Adv. Intell. Syst. 2023, 5, 2200301. [Google Scholar]
- He, Z.; Yang, Y.; Jiao, P.; Wang, H.; Lin, G.; Pähtz, T. Copebot: Underwater soft robot with copepod-like locomotion. Soft Robot. 2023, 10, 314–325. [Google Scholar]
- Zhang, Y.; Zhang, W.; Yang, J.; Pu, W. Bioinspired soft robotic fingers with sequential motion based on tendon-driven mechanisms. Soft Robot. 2022, 9, 531–541. [Google Scholar]
- Chen, Y.; Zhang, Y.; Li, H.; Shen, J.; Zhang, F.; He, J.; Lin, J.; Wang, B.; Niu, S.; Han, Z. Bioinspired hydrogel actuator for soft robotics: Opportunity and challenges. Nano Today 2023, 49, 101764. [Google Scholar]
- Speck, T.; Cheng, T.; Klimm, F.; Menges, A.; Poppinga, S.; Speck, O.; Tahouni, Y.; Tauber, F.; Thielen, M. Plants as inspiration for material-based sensing and actuation in soft robots and machines. MRS Bull. 2023, 48, 730–745. [Google Scholar]
- Shan, Y.; Zhao, Y.; Pei, C.; Yu, H.; Liu, P. A novel design of a passive variable stiffness soft robotic gripper. Bioinspir. Biomim. 2022, 17, 066014. [Google Scholar]
- Müller, A.; Aydemir, M.; Glodde, A.; Dietrich, F. Design approach for heavy-duty soft-robotic-gripper. Procedia CIRP 2020, 91, 301–305. [Google Scholar]
- Katzschmann, R.K.; Thieffry, M.; Goury, O.; Kruszewski, A.; Guerra, T.-M.; Duriez, C.; Rus, D. Dynamically closed-loop controlled soft robotic arm using a reduced order finite element model with state observer. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019. [Google Scholar]
- Nguyen, P.H.; Zhang, W. Design and computational modeling of fabric soft pneumatic actuators for wearable assistive devices. Sci. Rep. 2020, 10, 9638. [Google Scholar]
- Ferrentino, P.; Roels, E.; Brancart, J.; Terryn, S.; Van Assche, G.; Vanderborght, B. Finite Element Analysis-Based Soft Robotic Modeling: Simulating a Soft Actuator in SOFA. IEEE Robot. Autom. Mag. 2023, 2–12. [Google Scholar] [CrossRef]
- Naughton, N.; Sun, J.; Tekinalp, A.; Parthasarathy, T.; Chowdhary, G.; Gazzola, M. Elastica: A compliant mechanics environment for soft robotic control. IEEE Robot. Autom. Lett. 2021, 6, 3389–3396. [Google Scholar]
- Spielberg, A.; Du, T.; Hu, Y.; Rus, D.; Matusik, W. Advanced soft robot modeling in ChainQueen. Robotica 2023, 41, 74–104. [Google Scholar]
- Sung, C.; MacCurdy, R.; Coros, S.; Yim, M. Computational Robot Design and Customization. Robotica 2023, 41, 1–2. [Google Scholar]
- Hu, Y.; Liu, J.; Spielberg, A.; Tenenbaum, J.B.; Freeman, W.T.; Wu, J.; Rus, D.; Matusik, W. Chainqueen: A real-time differentiable physical simulator for soft robotics. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Ferrentino, P.; López-Díaz, A.; Terryn, S.; Legrand, J.; Brancart, J.; Van Assche, G.; Vázquez, E.; Vázquez, A.; Vanderborght, B. Quasi-static FEA model for a multi-material soft pneumatic actuator in SOFA. IEEE Robot. Autom. Lett. 2022, 7, 7391–7398. [Google Scholar]
- Duanmu, Z.; Stommel, M.; Cheng, L.K.; Xu, W. Simulation of solid meal digestion in a soft gastric robot using SOFA. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021. [Google Scholar]
- Tonkens, S.; Lorenzetti, J.; Pavone, M. Soft robot optimal control via reduced order finite element models. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xian, China, 30 May–5 June 2021. [Google Scholar]
- Sun, Y.; Zong, C.; Pancheri, F.; Chen, T.; Lueth, T.C. Design of topology optimized compliant legs for bio-inspired quadruped robots. Sci. Rep. 2023, 13, 4875. [Google Scholar]
- Pinskier, J.; Howard, D. From bioinspiration to computer generation: Developments in autonomous soft robot design. Adv. Intell. Syst. 2022, 4, 2100086. [Google Scholar]
- Gaeta, L.T.; McDonald, K.J.; Kinnicutt, L.; Le, M.; Wilkinson-Flicker, S.; Jiang, Y.; Atakuru, T.; Samur, E.; Ranzani, T. Magnetically induced stiffening for soft robotics. Soft Matter 2023, 19, 2623–2636. [Google Scholar]
- Jiang, Q.; Hu, Z.; Xie, Y.; Wu, K.; Zhang, S.; Wu, Z. Liquid-Metal-Based Magnetic Controllable Soft Microswitch with Rapid and Reliable Response for Intelligent Soft Systems. Micromachines 2022, 13, 2255. [Google Scholar]
- Li, W.; Chen, H.; Yi, Z.; Fang, F.; Guo, X.; Wu, Z.; Gao, Q.; Shao, L.; Xu, J.; Meng, G. Self-vectoring electromagnetic soft robots with high operational dimensionality. Nat. Commun. 2023, 14, 182. [Google Scholar]
- Li, Z.; Diller, E. Multi-material Fabrication for Magnetically Driven Miniature Soft Robots Using Stereolithography. In Proceedings of the 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Toronto, ON, USA, 25–29 July 2022. [Google Scholar]
- Liu, J.A.-C.; Gillen, J.H.; Mishra, S.R.; Evans, B.A.; Tracy, J.B. Photothermally and magnetically controlled reconfiguration of polymer composites for soft robotics. Sci. Adv. 2019, 5, eaaw2897. [Google Scholar]
- Wu, Y.; Zhang, S.; Yang, Y.; Li, Z.; Wei, Y.; Ji, Y. Locally controllable magnetic soft actuators with reprogrammable contraction-derived motions. Sci. Adv. 2022, 8, eabo6021. [Google Scholar] [CrossRef]
- Zhao, R.; Dai, H.; Yao, H. Liquid-metal magnetic soft robot with reprogrammable magnetization and stiffness. IEEE Robot. Autom. Lett. 2022, 7, 4535–4541. [Google Scholar]
- Ren, Y.; Sun, X.; Liu, J. Advances in liquid metal-enabled flexible and wearable sensors. Micromachines 2020, 11, 200. [Google Scholar]
- Wang, X.; Guo, R.; Liu, J. Liquid metal based soft robotics: Materials, designs, and applications. Adv. Mater. Technol. 2019, 4, 1800549. [Google Scholar]
- Zhang, M.; Chen, X.; Sun, Y.; Gan, M.; Liu, M.; Tang, S.-Y.; Zhang, S.; Li, X.; Li, W.; Sun, L. A magnetically and thermally controlled liquid metal variable stiffness material. Adv. Eng. Mater. 2023, 25, 2201296. [Google Scholar]
- Zhang, Z.; Tang, L.; Chen, C.; Yu, H.; Bai, H.; Wang, L.; Qin, M.; Feng, Y.; Feng, W. Liquid metal-created macroporous composite hydrogels with self-healing ability and multiple sensations as artificial flexible sensors. J. Mater. Chem. A 2021, 9, 875–883. [Google Scholar]
- Mersch, J.; Bruns, M.; Nocke, A.; Cherif, C.; Gerlach, G. High-Displacement, Fiber-Reinforced Shape Memory Alloy Soft Actuator with Integrated Sensors and Its Equivalent Network Model. Adv. Intell. Syst. 2021, 3, 2000221. [Google Scholar] [CrossRef]
- Yang, J.; Sun, S.; Yang, X.; Ma, Y.; Yun, G.; Chang, R.; Tang, S.-Y.; Nakano, M.; Li, Z.; Du, H. Equipping new sma artificial muscles with controllable mrf exoskeletons for robotic manipulators and grippers. IEEE/ASME Trans. Mechatron. 2022, 27, 4585–4596. [Google Scholar]
- Konda, R.; Bombara, D.; Swanbeck, S.; Zhang, J. Anthropomorphic twisted string-actuated soft robotic gripper with tendon-based stiffening. IEEE Trans. Robot. 2022, 39, 1178–1195. [Google Scholar]
- Hardman, D.; George Thuruthel, T.; Georgopoulou, A.; Clemens, F.; Iida, F. 3d printable soft sensory fiber networks for robust and complex tactile sensing. Micromachines 2022, 13, 1540. [Google Scholar]
- He, Q.; Zhang, Q. A flexible temperature sensing finger using optical fiber grating for soft robot application. Optoelectron. Lett. 2021, 17, 400–406. [Google Scholar]
- Jadhav, S.; Majit, M.R.A.; Shih, B.; Schulze, J.P.; Tolley, M.T. Variable stiffness devices using fiber jamming for application in soft robotics and wearable haptics. Soft Robot. 2022, 9, 173–186. [Google Scholar]
- Leber, A.; Dong, C.; Laperrousaz, S.; Banerjee, H.; Abdelaziz, M.E.; Bartolomei, N.; Schyrr, B.; Temelkuran, B.; Sorin, F. Highly Integrated Multi-Material Fibers for Soft Robotics. Adv. Sci. 2023, 10, 2204016. [Google Scholar]
- Mathai, A.R.P.; Stalin, T.; Valvivia y Alvarado, P. Flexible fiber inductive coils for soft robots and wearable devices. IEEE Robot. Autom. Lett. 2022, 7, 5711–5718. [Google Scholar]
- Stalin, T.; Jain, S.; Thanigaivel, N.K.; Teoh, J.; Raj, P.A.; Alvarado, P.V.Y. Automated fiber embedding for soft mechatronic components. IEEE Robot. Autom. Lett. 2021, 6, 4071–4078. [Google Scholar]
- Wachtarczyk, K.; Gąsior, P.; Kaleta, J.; Anuszkiewicz, A.; Bender, M.; Schledjewski, R.; Mergo, P.; Osuch, T. In-Plane strain measurement in composite structures with fiber Bragg grating written in side-hole elliptical core optical fiber. Materials 2021, 15, 77. [Google Scholar]
- Wei, Q.; Xu, H.; Sun, F.; Chang, F.; Chen, S.; Zhang, X. Biomimetic fiber reinforced dual-mode actuator for soft robots. Sens. Actuators A Phys. 2022, 344, 113761. [Google Scholar]
- Xiong, J.; Chen, J.; Lee, P.S. Functional fibers and fabrics for soft robotics, wearables, and human–robot interface. Adv. Mater. 2021, 33, 2002640. [Google Scholar]
- Yang, M.; Cooper, L.P.; Liu, N.; Wang, X.; Fok, M.P. Twining plant inspired pneumatic soft robotic spiral gripper with a fiber optic twisting sensor. Opt. Express 2020, 28, 35158–35167. [Google Scholar]
- He, Q.; Wang, Z.; Wang, Y.; Minori, A.; Tolley, M.T.; Cai, S. Electrically controlled liquid crystal elastomer–based soft tubular actuator with multimodal actuation. Sci. Adv. 2019, 5, eaax5746. [Google Scholar]
- Li, S.; Zhao, H.; Shepherd, R.F. Flexible and stretchable sensors for fluidic elastomer actuated soft robots. MRS Bull. 2017, 42, 138–142. [Google Scholar]
- Liang, H.; Wu, Y.; Zhang, Y.; Chen, E.; Wei, Y.; Ji, Y. Elastomers grow into actuators. Adv. Mater. 2023, 35, 2209853. [Google Scholar]
- Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D. Variable stiffness actuator for soft robotics using dielectric elastomer and low-melting-point alloy. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Zhao, T.; Yu, R.; Li, S.; Li, X.; Zhang, Y.; Yang, X.; Zhao, X.; Wang, C.; Liu, Z.; Dou, R. Superstretchable and processable silicone elastomers by digital light processing 3D printing. ACS Appl. Mater. Interfaces 2019, 11, 14391–14398. [Google Scholar]
- Wu, J.; Guo, J.; Linghu, C.; Lu, Y.; Song, J.; Xie, T.; Zhao, Q. Rapid digital light 3D printing enabled by a soft and deformable hydrogel separation interface. Nat. Commun. 2021, 12, 6070. [Google Scholar]
- Fusi, G.; Del Giudice, D.; Skarsetz, O.; Di Stefano, S.; Walther, A. Autonomous soft Robots empowered by chemical reaction networks. Adv. Mater. 2023, 35, 2209870. [Google Scholar]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft robotics: A review of recent developments of pneumatic soft actuators. Actuators 2020, 9, 3. [Google Scholar]
- Li, H.; Yao, J.; Zhou, P.; Chen, X.; Xu, Y.; Zhao, Y. High-force soft pneumatic actuators based on novel casting method for robotic applications. Sens. Actuators A Phys. 2020, 306, 111957. [Google Scholar]
- Wan, J.; Sun, L.; Du, T. A Bionic pipe-crawling soft robot based on the pneumatic silicone actuator. J. Phys. Conf. Ser. 2022, 2355, 012003. [Google Scholar]
- Du Pasquier, C.; Chen, T.; Tibbits, S.; Shea, K. Design and computational modeling of a 3D printed pneumatic toolkit for soft robotics. Soft Robot. 2019, 6, 657–663. [Google Scholar]
- Cheng, T.; Thielen, M.; Poppinga, S.; Tahouni, Y.; Wood, D.; Steinberg, T.; Menges, A.; Speck, T. Bio-Inspired Motion Mechanisms: Computational Design and Material Programming of Self-Adjusting 4D-Printed Wearable Systems. Adv. Sci. 2021, 8, 2100411. [Google Scholar] [CrossRef]
- Yap, Y.L.; Sing, S.L.; Yeong, W.Y. A review of 3D printing processes and materials for soft robotics. Rapid Prototyp. J. 2020, 26, 1345–1361. [Google Scholar]
- Sachyani Keneth, E.; Kamyshny, A.; Totaro, M.; Beccai, L.; Magdassi, S. 3D printing materials for soft robotics. Adv. Mater. 2021, 33, 2003387. [Google Scholar]
- Shorthose, O.; Albini, A.; He, L.; Maiolino, P. Design of a 3D-printed soft robotic hand with integrated distributed tactile sensing. IEEE Robot. Autom. Lett. 2022, 7, 3945–3952. [Google Scholar]
- Zolfagharian, A.; Lakhi, M.; Ranjbar, S.; Tadesse, Y.; Bodaghi, M. 3D printing non-assembly compliant joints for soft robotics. Results Eng. 2022, 15, 100558. [Google Scholar]
- Ge, Q.; Jian, B.; Li, H. Shaping soft materials via digital light processing-based 3D printing: A review. Forces Mech. 2022, 6, 100074. [Google Scholar]
- Patterson, Z.J.; Patel, D.K.; Bergbreiter, S.; Yao, L.; Majidi, C. A Method for 3D Printing and Rapid Prototyping of Fieldable Untethered Soft Robots. Soft Robot. 2023, 10, 292–300. [Google Scholar]
- Conrad, S.; Speck, T.; Tauber, F. Multi-material 3D-printer for rapid prototyping of bio-inspired soft robotic elements. In Proceedings of the Conference on Biomimetic and Biohybrid Systems, Freiburg, Germany, 28–30 July 2020. [Google Scholar]
- Conrad, S.; Speck, T.; Tauber, F.J. Tool changing 3D printer for rapid prototyping of advanced soft robotic elements. Bioinspir. Biomim. 2021, 16, 055010. [Google Scholar]
- Kar, D.; George, B.; Sridharan, K. A review on flexible sensors for soft robotics. In Systems for Printed Flexible Sensors: Design and Implementation; IOP Publishing Ltd.: Bristol, UK, 2022; pp. 1-1–1-15. [Google Scholar]
- Kim, J.; Chou, E.F.; Le, J.; Wong, S.; Chu, M.; Khine, M. Soft wearable pressure sensors for beat-to-beat blood pressure monitoring. Adv. Healthc. Mater. 2019, 8, 1900109. [Google Scholar]
- Soter, G.; Garrad, M.; Conn, A.T.; Hauser, H.; Rossiter, J. Skinflow: A soft robotic skin based on fluidic transmission. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019. [Google Scholar]
- Tan, Y.; Ivanov, K.; Mei, Z.; Li, H.; Li, H.; Lubich, L.; Wang, C.; Wang, L. A soft wearable and fully-textile piezoresistive sensor for plantar pressure capturing. Micromachines 2021, 12, 110. [Google Scholar]
- Bhat, A.; Ambrose, J.W.; Yeow, R.C.-H. Ultralow-Latency Textile Sensors for Wearable Interfaces with a Human-in-Loop Sensing Approach. Soft Robot. 2023, 10, 431–442. [Google Scholar]
- Tang, Z.; Jia, S.; Zhou, C.; Li, B. 3D printing of highly sensitive and large-measurement-range flexible pressure sensors with a positive piezoresistive effect. ACS Appl. Mater. Interfaces 2020, 12, 28669–28680. [Google Scholar]
- Lo, L.W.; Shi, H.; Wan, H.; Xu, Z.; Tan, X.; Wang, C. Inkjet-printed soft resistive pressure sensor patch for wearable electronics applications. Adv. Mater. Technol. 2020, 5, 1900717. [Google Scholar]
- Ntagios, M.; Nassar, H.; Pullanchiyodan, A.; Navaraj, W.T.; Dahiya, R. Robotic hands with intrinsic tactile sensing via 3D printed soft pressure sensors. Adv. Intell. Syst. 2020, 2, 1900080. [Google Scholar]
- Roberts, P.; Zadan, M.; Majidi, C. Soft tactile sensing skins for robotics. Curr. Robot. Rep. 2021, 2, 343–354. [Google Scholar]
- Tang, Y.; Dai, B.; Su, B.; Shi, Y. Recent advances of 4D printing technologies toward soft tactile sensors. Front. Mater. 2021, 8, 658046. [Google Scholar]
- Pang, Y.; Xu, X.; Chen, S.; Fang, Y.; Shi, X.; Deng, Y.; Wang, Z.-L.; Cao, C. Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots. Nano Energy 2022, 96, 107137. [Google Scholar]
- Dong, W.; Yang, L.; Fortino, G. Stretchable human machine interface based on smart glove embedded with PDMS-CB strain sensors. IEEE Sens. J. 2020, 20, 8073–8081. [Google Scholar]
- Tawk, C.; in het Panhuis, M.; Spinks, G.M.; Alici, G. 3D printed soft pneumatic bending sensing chambers for bilateral and remote control of soft robotic systems. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–10 July 2020. [Google Scholar]
- Shi, Q.; Sun, Z.; Le, X.; Xie, J.; Lee, C. Soft robotic perception system with ultrasonic auto-positioning and multimodal sensory intelligence. ACS Nano 2023, 17, 4985–4998. [Google Scholar]
- Ozel, S.; Skorina, E.H.; Luo, M.; Tao, W.; Chen, F.; Pan, Y.; Onal, C.D. A composite soft bending actuation module with integrated curvature sensing. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Xing, Z.; Lin, J.; McCoul, D.; Zhang, D.; Zhao, J. Inductive strain sensor with high repeatability and ultra-low hysteresis based on mechanical spring. IEEE Sens. J. 2020, 20, 14670–14675. [Google Scholar]
- Fracczak, L.; Nowak, M.; Koter, K. Flexible push pneumatic actuator with high elongation. Sens. Actuators A Phys. 2021, 321, 112578. [Google Scholar]
- Zhong, S.; Gai, Z.; Yang, Y.; Zhao, Y.; Qi, Y.; Yang, Y.; Peng, Y. A contraction length feedback method for the McKibben pneumatic artificial muscle. Sens. Actuators A Phys. 2022, 334, 113321. [Google Scholar]
- Chen, F.; Miao, Y.; Gu, G.; Zhu, X. Soft twisting pneumatic actuators enabled by freeform surface design. IEEE Robot. Autom. Lett. 2021, 6, 5253–5260. [Google Scholar]
- Tang, X.; Li, K.; Liu, Y.; Zhou, D.; Zhao, J. A general soft robot module driven by twisted and coiled actuators. Smart Mater. Struct. 2019, 28, 035019. [Google Scholar]
- Chen, W.; Xiong, C.; Liu, C.; Li, P.; Chen, Y. Fabrication and dynamic modeling of bidirectional bending soft actuator integrated with optical waveguide curvature sensor. Soft Robot. 2019, 6, 495–506. [Google Scholar]
- McDonald, K.J.; Kinnicutt, L.; Moran, A.M.; Ranzani, T. Modulation of magnetorheological fluid flow in soft robots using electropermanent magnets. IEEE Robot. Autom. Lett. 2022, 7, 3914–3921. [Google Scholar]
- Yoon, Y.; Park, H.; Lee, J.; Choi, J.; Jung, Y.; Han, S.; Ha, I.; Ko, S.H. Bioinspired untethered soft robot with pumpless phase change soft actuators by bidirectional thermoelectrics. Chem. Eng. J. 2023, 451, 138794. [Google Scholar]
- Villeda-Hernandez, M.; Baker, B.C.; Romero, C.; Rossiter, J.M.; Dicker, M.P.; Faul, C.F. Chemically Driven Oscillating Soft Pneumatic Actuation. Soft Robot. 2023, 10, 1159–1170. [Google Scholar]
- Lalegani Dezaki, M.; Bodaghi, M.; Serjouei, A.; Afazov, S.; Zolfagharian, A. Soft Pneumatic Actuators with Controllable Stiffness by Bio-Inspired Lattice Chambers and Fused Deposition Modeling 3D Printing. Adv. Eng. Mater. 2023, 25, 2200797. [Google Scholar]
- Perez-Guagnelli, E.; Damian, D.D. Deflected Versus Preshaped soft pneumatic actuators: A design and performance analysis Toward reliable soft robots. Soft Robot. 2022, 9, 713–722. [Google Scholar]
- Rumley, E.H.; Preninger, D.; Shagan Shomron, A.; Rothemund, P.; Hartmann, F.; Baumgartner, M.; Kellaris, N.; Stojanovic, A.; Yoder, Z.; Karrer, B. Biodegradable electrohydraulic actuators for sustainable soft robots. Sci. Adv. 2023, 9, eadf5551. [Google Scholar]
- Gong, S.; Wu, J.; Zheng, T.; Zhang, W.-M.; Shao, L. Untethered cable-driven soft actuators for quadruped robots. In Proceedings of the 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Shanghai, China, 26–28 November 2021. [Google Scholar]
- Drotman, D.; Ishida, M.; Jadhav, S.; Tolley, M.T. Application-driven design of soft, 3-D printed, pneumatic actuators with bellows. IEEE/ASME Trans. Mechatron. 2018, 24, 78–87. [Google Scholar]
- Wang, J.; Chortos, A. Control strategies for soft robot systems. Adv. Intell. Syst. 2022, 4, 2100165. [Google Scholar]
- Manfredi, L.; Cuschieri, A. A wireless compact control unit (wiccu) for untethered pneumatic soft robots. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019. [Google Scholar]
- Zhou, J.; Chen, X.; Chang, U.; Lu, J.-T.; Leung, C.C.Y.; Chen, Y.; Hu, Y.; Wang, Z. A soft-robotic approach to anthropomorphic robotic hand dexterity. IEEE Access 2019, 7, 101483–101495. [Google Scholar]
- Vidlak, M.; Makys, P.; Stano, M. Comparison between model based and non-model based sensorless methods of brushed DC motor. Transp. Res. Procedia 2021, 55, 911–918. [Google Scholar]
- Gillespie, M.T.; Best, C.M.; Townsend, E.C.; Wingate, D.; Killpack, M.D. Learning nonlinear dynamic models of soft robots for model predictive control with neural networks. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018. [Google Scholar]
- Katzschmann, R.K.; Della Santina, C.; Toshimitsu, Y.; Bicchi, A.; Rus, D. Dynamic motion control of multi-segment soft robots using piecewise constant curvature matched with an augmented rigid body model. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019. [Google Scholar]
- Besselaar, L.; Della Santina, C. One-shot learning closed-loop manipulation of soft slender objects based on a planar polynomial curvature model. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 4–8 April 2022. [Google Scholar]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar]
- Piriadarshani, D.; Sujitha, S.S. The role of transfer function in the study of stability analysis of feedback control system with delay. Int. J. Appl. Math. 2018, 31, 727. [Google Scholar]
- Bruder, D.; Remy, C.D.; Vasudevan, R. Nonlinear system identification of soft robot dynamics using koopman operator theory. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Azizkhani, M.; Gunderman, A.L.; Godage, I.S.; Chen, Y. Dynamic control of soft robotic arm: An experimental study. IEEE Robot. Autom. Lett. 2023, 8, 1897–1904. [Google Scholar]
- Dou, W.; Zhong, G.; Yang, J.; Shen, J. Design and Modeling of a Hybrid Soft Robotic Manipulator with Compliant Mechanism. IEEE Robot. Autom. Lett. 2023, 8, 2301–2308. [Google Scholar]
- Yan, B.; Ma, C.; Zhao, Y.; Hu, N.; Guo, L. Geometrically enabled soft electroactuators via laser cutting. Adv. Eng. Mater. 2019, 21, 1900664. [Google Scholar]
- Demenkov, M. Experimental Investigation of Viscoelastic Hysteresis in a Flex Sensor. In Singularly Perturbed Systems, Multiscale Phenomena and Hysteresis: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Della Santina, C.; Duriez, C.; Rus, D. Model-Based Control of Soft Robots: A Survey of the State of the Art and Open Challenges. IEEE Control Syst. Mag. 2023, 43, 30–65. [Google Scholar]
- Chin, K.; Hellebrekers, T.; Majidi, C. Machine learning for soft robotic sensing and control. Adv. Intell. Syst. 2020, 2, 1900171. [Google Scholar]
- Bern, J.M.; Schnider, Y.; Banzet, P.; Kumar, N.; Coros, S. Soft robot control with a learned differentiable model. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020. [Google Scholar]
- Truby, R.L.; Della Santina, C.; Rus, D. Distributed proprioception of 3D configuration in soft, sensorized robots via deep learning. IEEE Robot. Autom. Lett. 2020, 5, 3299–3306. [Google Scholar]
- Zolfagharian, A.; Durran, L.; Gharaie, S.; Rolfe, B.; Kaynak, A.; Bodaghi, M. 4D printing soft robots guided by machine learning and finite element models. Sens. Actuators A Phys. 2021, 328, 112774. [Google Scholar]
- Demir, K.G.; Zhang, Z.; Yang, J.; Gu, G.X. Computational and Experimental Design Exploration of 3D-Printed Soft Pneumatic Actuators. Adv. Intell. Syst. 2020, 2, 2000013. [Google Scholar]
- Zhang, S.; Ke, X.; Jiang, Q.; Chai, Z.; Wu, Z.; Ding, H. Fabrication and Functionality Integration Technologies for Small-Scale Soft Robots. Adv. Mater. 2022, 34, 2200671. [Google Scholar]
- Arachchige, D.D.; Godage, I.S. Hybrid soft robots incorporating soft and stiff elements. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, UK, 4–8 April 2022. [Google Scholar]
- Stilli, A.; Wurdemann, H.A.; Althoefer, K. A novel concept for safe, stiffness-controllable robot links. Soft Robot. 2017, 4, 16–22. [Google Scholar]
- Yang, Y.; Li, Y.; Chen, Y. Principles and methods for stiffness modulation in soft robot design and development. Bio-Des. Manuf. 2018, 1, 14–25. [Google Scholar]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar]
- He, L.; Herzig, N.; Nanayakkara, T.; Maiolino, P. 3D-Printed Soft Sensors for Adaptive Sensing with Online and Offline Tunable Stiffness. Soft Robot. 2022, 9, 1062–1073. [Google Scholar]
- Sozer, C.; Paternò, L.; Tortora, G.; Menciassi, A. A novel pressure-controlled revolute joint with variable stiffness. Soft Robot. 2022, 9, 723–733. [Google Scholar]
- Best, C.M.; Wilson, J.P.; Killpack, M.D. Control of a pneumatically actuated, fully inflatable, fabric-based, humanoid robot. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015. [Google Scholar]
- Crowley, G.B.; Zeng, X.; Su, H.-J. A 3D printed soft robotic gripper with a variable stiffness enabled by a novel positive pressure layer jamming technology. IEEE Robot. Autom. Lett. 2022, 7, 5477–5482. [Google Scholar]
- Liu, Z.; Xu, L.; Liang, X.; Liu, J. Stiffness-tuneable segment for continuum soft robots with vertebrae. Machines 2022, 10, 581. [Google Scholar]
- Micklem, L.; Weymouth, G.D.; Thornton, B. Energy-efficient tunable-stiffness soft robots using second moment of area actuation. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022. [Google Scholar]
- Al-Rubaiai, M.; Pinto, T.; Qian, C.; Tan, X. Soft actuators with stiffness and shape modulation using 3D-printed conductive polylactic acid material. Soft Robot. 2019, 6, 318–332. [Google Scholar]
- Liu, Z.; Wang, Y.; Wang, J.; Fei, Y.; Du, Q. An obstacle-avoiding and stiffness-tunable modular bionic soft robot. Robotica 2022, 40, 2651–2665. [Google Scholar]
- Aydin, M.; Sariyildiz, E.; Tawk, C.D.; Mutlu, R.; Alici, G. Variable Stiffness Improves Safety and Performance in Soft Robotics. In Proceedings of the 2023 IEEE International Conference on Mechatronics (ICM), Loughborough, UK, 15–17 March 2023. [Google Scholar]
- Pardomuan, J.; Takahashi, N.; Koike, H. ASTRE: Prototyping Technique for Modular Soft Robots With Variable Stiffness. IEEE Access 2022, 10, 80495–80504. [Google Scholar]
- Yang, Y.; Qi, Y.; Pan, P.; Zhao, Y.; Zhong, S.; Yang, Y. Oscillation suppression in a particle robotic arm by stiffness and damping regulation. Mechatronics 2022, 85, 102819. [Google Scholar]
- Wu, S.; Ze, Q.; Zhang, R.; Hu, N.; Cheng, Y.; Yang, F.; Zhao, R. Symmetry-breaking actuation mechanism for soft robotics and active metamaterials. ACS Appl. Mater. Interfaces 2019, 11, 41649–41658. [Google Scholar]
- Bartkowski, P.; Gawiński, F.; Pawliszak, Ł. E-Morph as a New Adaptive Actuator for Soft Robotics. IEEE Robot. Autom. Lett. 2022, 7, 8831–8836. [Google Scholar]
- Ma, B.; Shaqura, M.Z.; Richardson, R.C.; Dehghani-Sanij, A.A. A Study on Phase-Changing Materials for Controllable Stiffness in Robotic Joints. Robotics 2022, 11, 66. [Google Scholar]
- Li, L.; Xie, F.; Wang, T.; Wang, G.; Tian, Y.; Jin, T.; Zhang, Q. Stiffness-tunable soft gripper with soft-rigid hybrid actuation for versatile manipulations. Soft Robot. 2022, 9, 1108–1119. [Google Scholar]
- Zhong, Y.; Du, R.; Guo, P.; Yu, H. Investigation on a new approach for designing articulated soft robots with discrete variable stiffness. IEEE/ASME Trans. Mechatron. 2021, 26, 2998–3009. [Google Scholar]
- Xiao, Q.; Musa, M.; Godage, I.S.; Su, H.; Chen, Y. Kinematics and stiffness modeling of soft robot with a concentric backbone. J. Mech. Robot. 2023, 15, 051011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
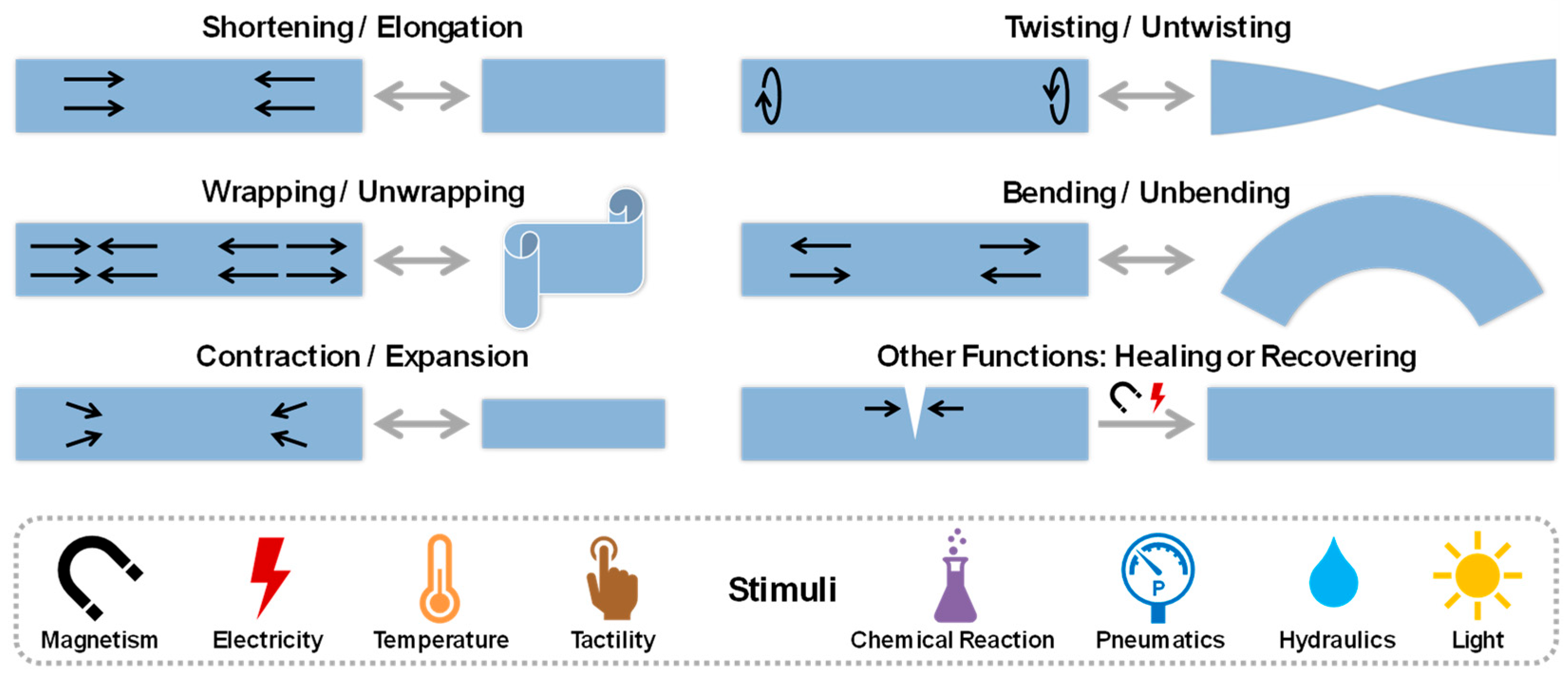
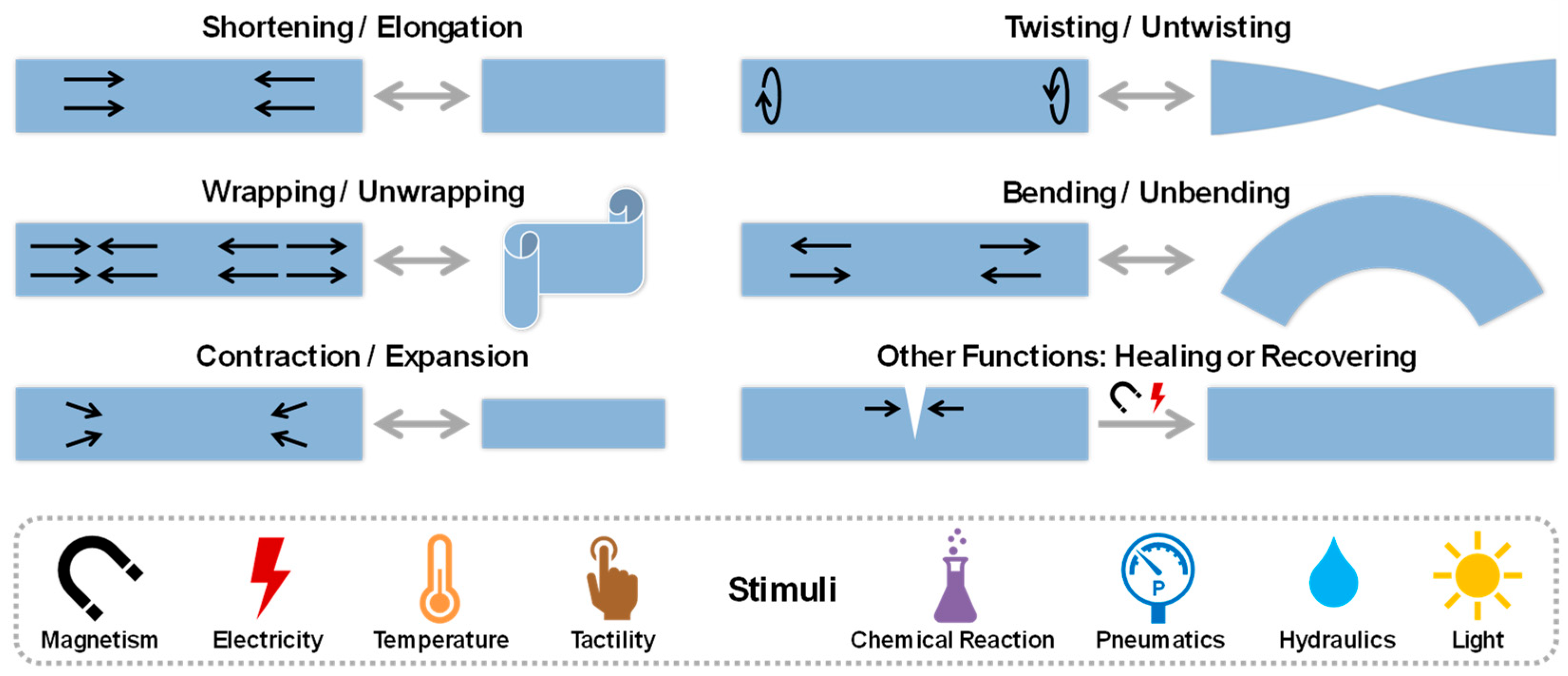
| Soft Materials | Common Functions | Common Stimuli | References |
|---|---|---|---|
| Magnetic Soft Materials | Actuation; Stiffening; Healing; Control; Sensing; Structural Support | Magnetism (M); Electricity (E); Temperature (T) | [31,32,61,78,107,108,109,110,111,112,113] |
| Liquid Metals | Stiffening; Control; Sensing | M; E; T | [108,113,114,115,116,117] |
| Shape Memory Materials | Actuation; Healing; Sensing | Tactility, M; E; T | [33,118,119] |
| Artificial Tendon Fibers | Actuation; Stiffening; Control; Structural Support | Tactility; M; E; T | [67,71,90,118,120,121,122,123,124,125,126,127,128,129,130] |
| Liquid Crystal Polymers | Actuation; Stiffening; Control; Sensing | Light; M; E; T | [37,38,39,80,112,131] |
| Elastomers or Silicones (i.e., Ninjaflex™, Dragon Skin™, Ecoflex™) | Actuation; Stiffening; Healing; Structural Support | Pneumatics (P); Hydraulics (H); E; T | [80,112,118,131,132,133,134,135] |
| Hydrogels | Actuation; Stiffening; Healing; Sensing; Structural Support | H; M; E; T; Chemical Reaction | [29,91,117,136,137] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ambaye, G.; Boldsaikhan, E.; Krishnan, K. Soft Robot Design, Manufacturing, and Operation Challenges: A Review. J. Manuf. Mater. Process. 2024, 8, 79. https://doi.org/10.3390/jmmp8020079
Ambaye G, Boldsaikhan E, Krishnan K. Soft Robot Design, Manufacturing, and Operation Challenges: A Review. Journal of Manufacturing and Materials Processing. 2024; 8(2):79. https://doi.org/10.3390/jmmp8020079
Chicago/Turabian StyleAmbaye, Getachew, Enkhsaikhan Boldsaikhan, and Krishna Krishnan. 2024. "Soft Robot Design, Manufacturing, and Operation Challenges: A Review" Journal of Manufacturing and Materials Processing 8, no. 2: 79. https://doi.org/10.3390/jmmp8020079
APA StyleAmbaye, G., Boldsaikhan, E., & Krishnan, K. (2024). Soft Robot Design, Manufacturing, and Operation Challenges: A Review. Journal of Manufacturing and Materials Processing, 8(2), 79. https://doi.org/10.3390/jmmp8020079